
Bus Drivers’ Behavioral Intention to Comply with Real-Time Control Instructions: An Empirical Study from China


Abstract
1. Introduction
2. Related Work
2.1. Bus Drivers’ Perspectives in a Real-Time Control Context
2.2. Bus Drivers’ Behavioral Responses to Instructions
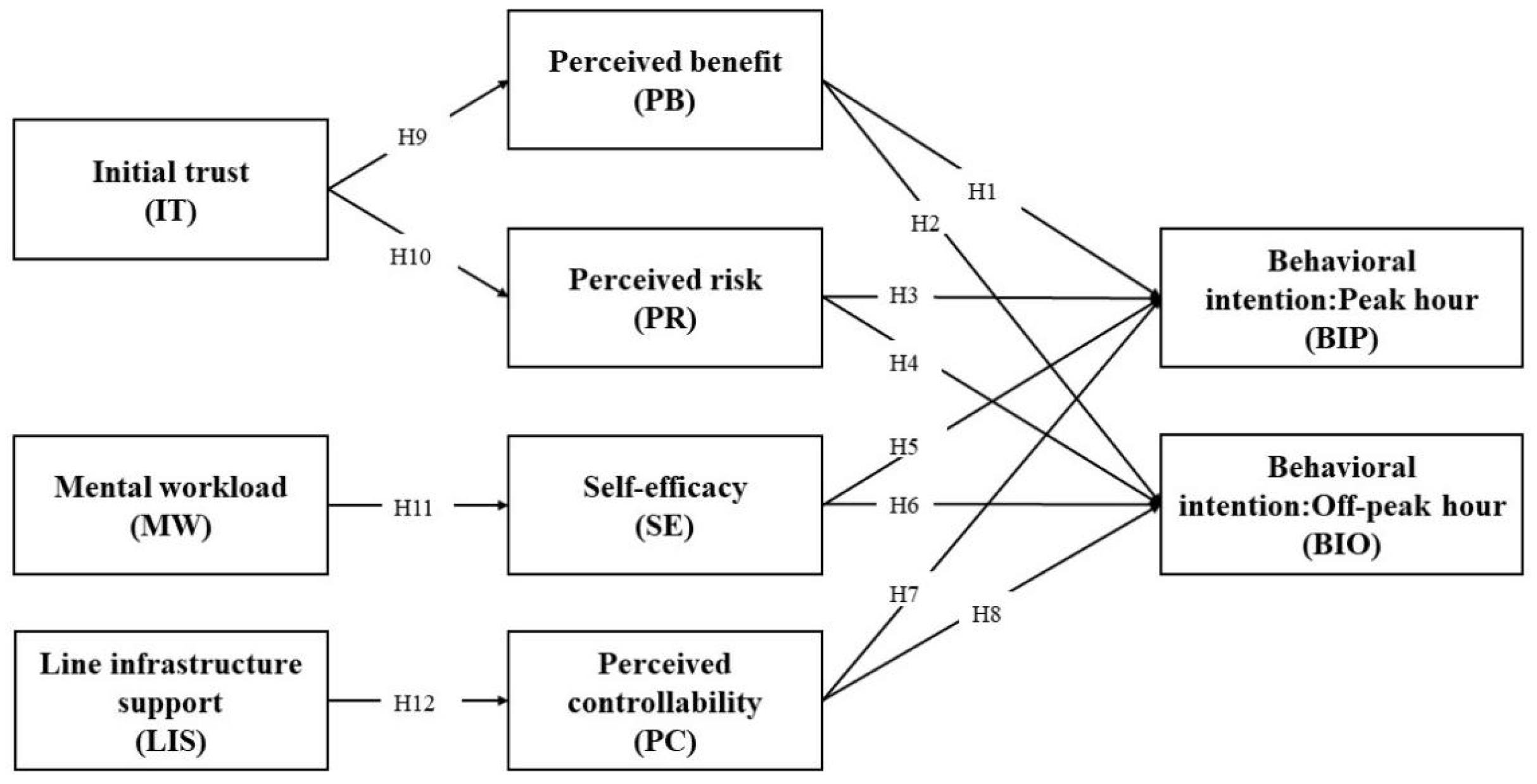
3. Theoretical Framework
3.1. Theoretical Background
3.2. Perceived Benefit, Perceived Risk, and Behavioral Intention
3.3. Self-Efficacy, Perceived Controllability, and Behavioral Intention
3.4. Trust and Perceived Benefit/Risk
3.5. Mental Workload and Self-Efficacy
3.6. Line Infrastructure Support and Perceived Controllability
4. Methodology
4.1. Questionnaire
4.2. Procedure and Respondents
4.3. Analysis Methods
5. Results
5.1. Reliability and Validity Measures
5.2. Testing of Structural Models and Hypotheses
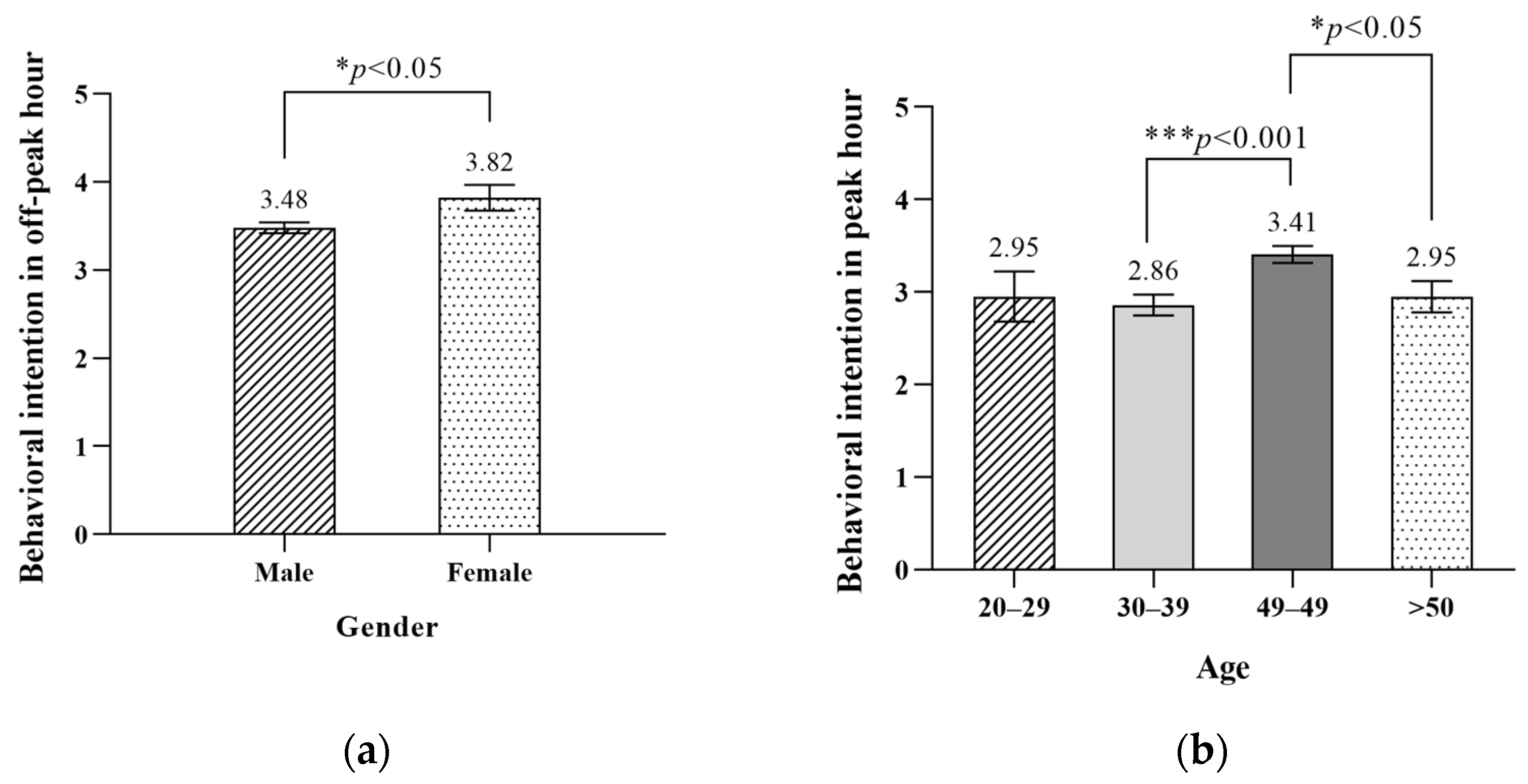
5.3. Demographic Differences in Behavioral Intention and Influencing Factors
6. Discussion
6.1. Perceived Benefit, Perceived Risk, and Behavioral Intention
6.2. Self-Efficacy, Perceived Controllability, and Behavioral Intention
6.3. Trust and Perceived Benefit/Risk
6.4. Mental Workload and Self-Efficacy
6.5. LIS and Perceived Controllability
6.6. Demographic Differences in Behavioral Intention
7. Conclusions
7.1. Theoretical Contributions
7.2. Practical Implications
8. Limitations
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Andres, M.; Nair, R. A predictive-control framework to address bus bunching. Transp. Res. Part B Methodol. 2017, 104, 123–148. [Google Scholar] [CrossRef]
- Byon, Y.J.; Cortés, C.E.; Jeong, Y.S.; Martínez, F.J.; Munizaga, M.A.; Zúñiga, M. Bunching and headway adherence approach to public transport with GPS. Int. J. Civ. Eng. 2018, 16, 647–658. [Google Scholar] [CrossRef]
- Wang, J.; Sun, L. Dynamic holding control to avoid bus bunching: A multi-agent deep reinforcement learning framework. Transp. Res. Part C Emerg. Technol. 2020, 116, 102661. [Google Scholar] [CrossRef]
- Daganzo, C.F.; Pilachowski, J. Reducing bunching with bus-to-bus cooperation. Transp. Res. Part B Methodol. 2011, 45, 267–277. [Google Scholar] [CrossRef]
- Muñoz, J.C.; Cortés, C.E.; Giesen, R.; Sáez, D.; Delgado, F.; Valencia, F.; Cipriano, A. Comparison of dynamic control strategies for transit operations. Transp. Res. Part C Emerg. Technol. 2013, 28, 101–113. [Google Scholar] [CrossRef]
- Daganzo, C.F. A headway-based approach to eliminate bus bunching: Systematic analysis and comparisons. Transp. Res. Part B Methodol. 2009, 43, 913–921. [Google Scholar] [CrossRef]
- Chen, J.; Liu, Z.; Zhu, S.; Wang, W. Design of limited-stop bus service with capacity constraint and stochastic travel time. Transp. Res. Part E Logist. Transp. Rev. 2015, 83, 1–15. [Google Scholar] [CrossRef]
- Cortés, C.E.; Sáez, D.; Milla, F.; Núñez, A.; Riquelme, M. Hybrid predictive control for real-time optimization of public transport systems’ operations based on evolutionary multi-objective optimization. Transp. Res. Part C Emerg. Technol. 2010, 18, 757–769. [Google Scholar] [CrossRef]
- Delgado, F.; Munoz, J.C.; Giesen, R. How much can holding and/or limiting boarding improve transit performance? Transp. Res. Part B Methodol. 2012, 46, 1202–1217. [Google Scholar] [CrossRef]
- Jiang, R.; Hu, M.B.; Jia, B.; Wu, Q.S. Realistic bus route model considering the capacity of the bus. Eur. Phys. J. B 2003, 34, 367–372. [Google Scholar] [CrossRef]
- Lizana, P.; Muñoz, J.C.; Giesen, R.; Delgado, F. Bus control strategy application: Case study of Santiago transit system. Procedia Comput. Sci. 2014, 32, 397–404. [Google Scholar] [CrossRef]
- Tirachini, A.; Godachevich, J.; Cats, O.; Muñoz, J.C.; Soza-Parra, J. Headway variability in public transport: A review of metrics, determinants, effects for quality of service and control strategies. Transp. Rev. 2022, 42, 337–361. [Google Scholar] [CrossRef]
- Argote-Cabanero, J.; Daganzo, C.F.; Lynn, J.W. Dynamic control of complex transit systems. Transp. Res. Part B Methodol. 2015, 81, 146–160. [Google Scholar] [CrossRef]
- Phillips, W.; Del Rio, A.; Muñoz, J.C.; Delgado, F.; Giesen, R. Quantifying the effects of driver non-compliance and communication system failure in the performance of real-time bus control strategies. Transp. Res. Part A Pol. Pract. 2015, 78, 463–472. [Google Scholar] [CrossRef]
- Amin, M.K.; Munira, S.; Azhar, A.; Amin, A.; Karim, M.T. Factors affecting employees’ behavioral intention to adopt accounting information system (AIS) in Bangladesh. In Proceedings of the 19th International Conference on Computer and Information Technology, Dhaka, Bangladesh, 18–20 December 2016. [Google Scholar] [CrossRef]
- Martínez-Estupiñan, Y.; Delgado, F.; Muñoz, J.C.; Watkins, K.E. Understanding what elements influence a bus driver to use headway regularity tools: Case study of Santiago public transit system. Transp. Sci. 2022, 19, 2025950. [Google Scholar] [CrossRef]
- Zhou, M.; Kong, N.; Zhao, L.; Huang, F.; Wang, S.; Campy, K.S. Understanding urban delivery drivers’ intention to adopt electric trucks in China. Transp. Res. Part D Transp. Environ. 2019, 74, 65–81. [Google Scholar] [CrossRef]
- Biassoni, F.; Ruscio, D.; Ciceri, R. Limitations and automation: The role of information about device-specific features in ADAS acceptability. Saf. Sci. 2016, 85, 179–186. [Google Scholar] [CrossRef]
- Kaye, S.A.; Lewis, I.; Forward, S.; Delhomme, P. A priori acceptance of highly automated cars in Australia, France, and Sweden: A theoretically-informed investigation guided by the TPB and UTAUT. Accid. Anal. Prev. 2020, 137, 105441. [Google Scholar] [CrossRef] [PubMed]
- Man, S.S.; Xiong, W.; Chang, F.; Chan, A.H. Critical Factors Influencing Acceptance of Automated Vehicles by Hong Kong Drivers. IEEE Access 2020, 8, 109845–109856. [Google Scholar] [CrossRef]
- Mamo, W.G.; Ross, V.; Dadi, Y.L.; Reinolsmann, N.; Brijs, T.; Brijs, K. Acceptability of intelligent speed adaptation technology in developing Countries: The case of Ethiopian minibus taxi drivers. Case Stud. Transp. Policy 2021, 9, 1375–1385. [Google Scholar] [CrossRef]
- Ajzen, I. The theory of planned behavior. Organ. Behav. Hum. Decis. Process. 1991, 50, 179–211. [Google Scholar] [CrossRef]
- Davis, F.D.; Bagozzi, R.P.; Warshaw, P.R. User acceptance of computer technology: A comparison of two theoretical models. Manag. Sci. 1989, 35, 982–1003. [Google Scholar] [CrossRef]
- Bearth, A.; Siegrist, M. Are risk or benefit perceptions more important for public acceptance of innovative food technologies: A meta-analysis. Trends Food Sci. Technol. 2016, 49, 14–23. [Google Scholar] [CrossRef]
- Liu, P.; Yang, R.; Xu, Z. Public acceptance of fully automated driving: Effects of social trust and risk/benefit perceptions. Risk Anal. 2019, 39, 326–341. [Google Scholar] [CrossRef] [PubMed]
- Pritchard, G.; Vines, J.; Briggs, P.; Thomas, L.; Olivier, P. Digitally driven: How location based services impact the work practices of London bus drivers. In Proceedings of the SIGCHI Conference on Human Factors in Computing Systems, New York, NY, USA, 26 April–1 May 2014. [Google Scholar] [CrossRef]
- Cats, O. Determinants of bus riding time deviations: Relationship between driving patterns and transit performance. J. Transp. Eng. Part A Syst. 2019, 145, 04018078. [Google Scholar] [CrossRef]
- Ji, Y.; He, L.; Zhang, H.M. Bus drivers’ responses to real-time schedule adherence and the effects on transit reliability. Transp. Res. Rec. 2014, 2417, 1–9. [Google Scholar] [CrossRef]
- Berrebi, S.J.; Crudden, S.Ó.; Watkins, K.E. Translating research to practice: Implementing real-time control on high-frequency transit routes. Transp. Res. Part A Policy Pract. 2018, 111, 213–226. [Google Scholar] [CrossRef]
- Strathman, J.G.; Kimpel, T.J.; Dueker, K.J.; Gerhart, R.L.; Turner, K.; Griffin, D.; Callas, S. Bus transit operations control: Review and an experiment involving Tri-Met’s automated bus dispatching system. J. Public Transp. 2001, 4, 1–26. [Google Scholar] [CrossRef]
- Vankov, D.; Schroeter, R.; Twisk, D. Understanding the predictors of young drivers’ speeding intention and behaviour in a three-month longitudinal study. Accid. Anal. Prev. 2021, 151, 105859. [Google Scholar] [CrossRef]
- Kaye, S.A.; Lewis, I.; Buckley, L.; Rakotonirainy, A. Assessing the feasibility of the theory of planned behaviour in predicting drivers’ intentions to operate conditional and full automated vehicles. Transp. Res. Part F Traffic Psychol. Behav. 2020, 74, 173–183. [Google Scholar] [CrossRef]
- Buckley, L.; Kaye, S.A.; Pradhan, A.K. Psychosocial factors associated with intended use of automated vehicles: A simulated driving study. Accid. Anal. Prev. 2018, 115, 202–208. [Google Scholar] [CrossRef] [PubMed]
- Wang, X.; Xu, L. The factors underlying drivers’ unwillingness to give way to ambulances: An application of an extended theory of planned behavior. J. Transp. Health 2021, 20, 101000. [Google Scholar] [CrossRef]
- Nandavar, S.; Lewis, I.; White, K.M. Understanding drivers’ altruistic driving decisions: A theoretically guided investigation. Transp. Res. Part F Traffic Psychol. Behav. 2019, 62, 212–227. [Google Scholar] [CrossRef]
- Nawawi, S.B.; Roslin, R.M.; Hamid, N.B.A. Customers’ Intention to Repurchase Halal Personal Care Products: The Moderating Role of Religiosity. In Proceedings of the 2nd Advances in Business Research International Conference; Springer: Singapore, 2018. [Google Scholar] [CrossRef]
- Taylor, S.; Todd, P.A. Decomposition and crossover effects in the theory of planned behavior: A study of consumer adoption intentions. Int. J. Res. Mark. 1995, 12, 137–155. [Google Scholar] [CrossRef]
- Hsu, M.H.; Chiu, C. Predicting electronic service continuance with a decomposed theory of planned behaviour. Behav. Inf. Technol. 2004, 23, 359–373. [Google Scholar] [CrossRef]
- Sparks, P.; Guthrie, C.A.; Shepherd, R. The dimensional structure of the perceived behavioral control construct. J. Appl. Soc. Psychol. 1997, 27, 418–438. [Google Scholar] [CrossRef]
- Armitage, C.J.; Conner, M. The theory of planned behaviour: Assessment of predictive validity and perceived control. Br. J. Soc. Psychol. 1999, 38, 35–54. [Google Scholar] [CrossRef]
- Kuo, F.Y.; Hsu, M.H. An investigation of volitional control in information ethics. Behav. Inf. Technol. 2003, 22, 53–62. [Google Scholar] [CrossRef]
- Fishbein, M.; Ajzen, I. Belief, Attitude, Intention, and Behavior: An Introduction to Theory and Research. Contemp. Sociol. 1977, 6, 244. [Google Scholar] [CrossRef]
- Chandon, P.; Wansink, B.; Laurent, G. A Benefit Congruency Framework of Sales Promotion Effectiveness. J. Mark. 2000, 64, 65–81. [Google Scholar] [CrossRef]
- Peter, J.P.; Ryan, M.J. An investigation of perceived risk at the brand level. J. Mark. Res. 1976, 13, 184–188. [Google Scholar] [CrossRef]
- Ajzen, I. Perceived behavioral control, self-efficacy, locus of control, and the theory of planned behavior. J. Appl. Soc. Psychol. 2002, 32, 665–683. [Google Scholar] [CrossRef]
- Kim, M.K.; Park, J.H.; Oh, J.; Lee, W.S.; Chung, D. Identifying and prioritizing the benefits and concerns of connected and autonomous vehicles: A comparison of individual and expert perceptions. Res. Transp. Bus. Manag. 2019, 32, 100438. [Google Scholar] [CrossRef]
- Liu, H.; Yang, R.; Wang, L.; Liu, P. Evaluating initial public acceptance of highly and fully autonomous vehicles. Int. J. Hum. Comput. Interact. 2019, 35, 919–931. [Google Scholar] [CrossRef]
- Woldeamanuel, M.; Nguyen, D. Perceived benefits and concerns of autonomous vehicles: An exploratory study of millennials’ sentiments of an emerging market. Res. Transp. Econ. 2018, 71, 44–53. [Google Scholar] [CrossRef]
- Payne, J.W.; Bettman, J.R.; Johnson, E.J. Behavioral decision research: A constructive processing perspective. Annu. Rev. Psychol. 1992, 43, 87–131. [Google Scholar] [CrossRef]
- Siegrist, M. The influence of trust and perceptions of risks and benefits on the acceptance of gene technology. Risk Anal. 2010, 20, 195–204. [Google Scholar] [CrossRef]
- Rolim, C.; Baptista, P.C.; Duarte, G.; Farias, T.L.; Pereira, J.M. Impacts of real-time feedback on driving behaviour: A casestudy of bus passenger drivers. Eur. J. Transp. Infrastruct. Res. 2017, 17, 346–359. [Google Scholar] [CrossRef]
- Bandura, A. Social Foundation of Thought and Action: A Social Cognitive Theory; Prentice-Hall: Englewood Cliffs, NJ, USA, 1986. [Google Scholar]
- Armitage, C.J.; Conner, M.; Loach, J.; Willetts, D. Different perceptions of control: Applying an extended theory of planned behavior to legal and illegal drug use. Basic Appl. Soc. Psychol. 1999, 21, 301–316. [Google Scholar] [CrossRef]
- Terry, D.J.; O’Leary, J.E. The theory of planned behaviour: The effects of perceived behavioural control and self-efficacy. Br. J. Soc. Psychol. 1995, 34, 199–220. [Google Scholar] [CrossRef]
- Elliott, M.A.; Thomson, J.A. The social cognitive determinants of offending drivers’ speeding behaviour. Accid. Anal. Prev. 2010, 42, 1595–1605. [Google Scholar] [CrossRef]
- Bulgurcu, B.; Cavusoglu, H.; Benbasat, I. Information security policy compliance: An empirical study of rationality-based beliefs and information security awareness. MIS Q. 2010, 34, 523–548. [Google Scholar] [CrossRef]
- Compeau, D.R.; Higgins, C.A. Computer self-efficacy: Development of a measure and initial test. MIS Q. 1995, 19, 189–211. [Google Scholar] [CrossRef]
- Compeau, D.; Higgins, C.A.; Huff, S. Social cognitive theory and individual reactions to computing technology: A longitudinal study. MIS Q. 1999, 23, 145–158. [Google Scholar] [CrossRef]
- Du, H.; Zhu, G.; Zheng, J. Why travelers trust and accept self-driving cars: An empirical study. Travel Behav. Soc. 2021, 22, 1–9. [Google Scholar] [CrossRef]
- Lee, J.; Lee, D.; Park, Y.; Lee, S.; Ha, T. Autonomous vehicles can be shared, but a feeling of ownership is important: Examination of the influential factors for intention to use autonomous vehicles. Transp. Res. Part C Emerg. Technol. 2019, 107, 411–422. [Google Scholar] [CrossRef]
- Zhu, G.; Chen, Y.; Zheng, J. Modelling the acceptance of fully autonomous vehicles: A media-based perception and adoption model. Transp. Res. Part F Traffic Psychol. Behav. 2020, 73, 80–91. [Google Scholar] [CrossRef]
- Kuo, F.Y.; Young, M.L. Predicting knowledge sharing practices through intention: A test of competing models. Comput. Hum. Behav. 2008, 24, 2697–2722. [Google Scholar] [CrossRef]
- Vamvaka, V.; Stoforos, C.; Palaskas, T.; Botsaris, C. Attitude toward entrepreneurship, perceived behavioral control, and entrepreneurial intention: Dimensionality, structural relationships, and gender differences. J. Innov. Entrep. 2020, 9, 5. [Google Scholar] [CrossRef]
- Elliott, M.A. Predicting motorcyclists’ intentions to speed: Effects of selected cognitions from the theory of planned behaviour, self-identity and social identity. Accid. Anal. Prev. 2010, 42, 718–725. [Google Scholar] [CrossRef]
- Montague, E. Validation of a trust in medical technology instrument. Appl. Ergon. 2010, 41, 812–821. [Google Scholar] [CrossRef]
- Pavlou, P.A.; Fygenson, M. Understanding and predicting electronic commerce adoption: An extension of the theory of planned behavior. MIS Q. 2006, 30, 115–143. [Google Scholar] [CrossRef]
- Mayer, R.C.; Davis, J.H.; Schoorman, F.D. An integrative model of organizational trust. Acad. Manag. Rev. 1995, 20, 709–734. [Google Scholar] [CrossRef]
- Wang, W.; Benbasat, I. Trust and TAM for online recommendation agents. In Proceedings of the Americas Conference on Information Systems 2004, New York, NY, USA, 6–8 August 2004; Available online: https://aisel.aisnet.org/amcis2004/244 (accessed on 5 May 2023).
- Thatcher, J.B.; McKnight, D.H.; Baker, E.W.; Arsal, R.E.; Roberts, N.H. The role of trust in postadoption IT exploration: An empirical examination of knowledge management systems. IEEE Trans. Eng. Manag. 2010, 58, 56–70. [Google Scholar] [CrossRef]
- Lee, J.D.; See, K.A. Trust in automation: Designing for appropriate reliance. Hum. Factors 2004, 46, 50–80. [Google Scholar] [CrossRef]
- Marsh, S.; Dibben, M.R. The role of trust in information science and technology. Annu. Rev. Inf. Sci. Technol. 2003, 37, 465–498. [Google Scholar] [CrossRef]
- Berg, J.; Dickhaut, J.; McCabe, K. Trust, reciprocity, and social history. Games Econ. Behav. 1995, 10, 122–142. [Google Scholar] [CrossRef]
- Zhou, T. Understanding users’ initial trust in mobile banking: An elaboration likelihood perspective. Comput. Hum. Behav. 2012, 28, 1518–1525. [Google Scholar] [CrossRef]
- Wu, K.; Zhao, Y.; Zhu, Q.; Tan, X.; Zheng, H. A meta-analysis of the impact of trust on technology acceptance model: Investigation of moderating influence of subject and context type. Int. J. Inf. Manag. 2011, 31, 572–581. [Google Scholar] [CrossRef]
- Bronfman, N.C.; Vázquez, E.L. A cross-cultural study of perceived benefit versus risk as mediators in the trust-acceptance relationship. Risk Anal. 2011, 31, 1919–1934. [Google Scholar] [CrossRef]
- Liu, P.; Xu, Z.; Zhao, X. Road tests of self-driving vehicles: Affective and cognitive pathways in acceptance formation. Transp. Res. Part A Policy Pract. 2019, 124, 354–369. [Google Scholar] [CrossRef]
- Gefen, D.; Benbasat, I.; Pavlou, P. A research agenda for trust in online environments. J. Manag. Inf. Syst. 2008, 24, 275–286. [Google Scholar] [CrossRef]
- Lee, K.W.; Tsai, M.T.; Lanting, M.C.L. From marketplace to marketspace: Investigating the consumer switch to online banking. Electron. Commer. Res. Appl. 2011, 10, 115–125. [Google Scholar] [CrossRef]
- Choi, J.K.; Ji, Y.G. Investigating the importance of trust on adopting an autonomous vehicle. Int. J. Hum. Comput. Interact. 2015, 31, 692–702. [Google Scholar] [CrossRef]
- Pavlou, P.A. Consumer acceptance of electronic commerce: Integrating trust and risk with the technology acceptance model. Int. J. Electron. Commer. 2003, 7, 101–134. [Google Scholar] [CrossRef]
- Flynn, J.; Burns, W.; Mertz, C.K.; Slovic, P. Trust as a determinant of opposition to a high-level radioactive waste repository: Analysis of a structural model. Risk Anal. 1992, 12, 417–429. [Google Scholar] [CrossRef]
- Flynn, J.; Slovic, P.; Mertz, C.K. Gender, race, and perception of environmental health risks. Risk Anal. 1994, 14, 1101–1108. [Google Scholar] [CrossRef]
- Miller, G.A. The magical number seven, plus or minus two: Some limits on our capacity for processing information. Psychol. Rev. 1956, 63, 81–97. [Google Scholar] [CrossRef]
- Chen, C.W.; Koufaris, M. Multi-device use: Understanding the motivations behind switching between multiple devices during a task. Int. J. Hum. Comput. Interact. 2020, 36, 1178–1193. [Google Scholar] [CrossRef]
- Artino, A.R., Jr. Cognitive load theory and the role of learner experience: An abbreviated review for educational practitioners. AACE J. 2008, 16, 425–439. Available online: https://www.academia.edu/18542189/Cognitive_load_theory_and_the_role_of_learner_experience_An_abbreviated_review_for_educational_practitioners (accessed on 13 May 2023).
- Schmutz, P.; Heinz, S.; Métrailler, Y.; Opwis, K. Cognitive load in eCommerce applications—Measurement and effects on user satisfaction. Adv. Hum. Comput. Interact. 2009, 2009, 121494. [Google Scholar] [CrossRef]
- Hart, S.G.; Staveland, L.E. Development of NASA-TLX (Task Load Index): Results of empirical and theoretical research. Adv. Psychol. 1988, 52, 139–183. [Google Scholar] [CrossRef]
- Sweller, J. Cognitive load during problem solving: Effects on learning. Cogn. Sci. 1988, 12, 257–285. [Google Scholar] [CrossRef]
- Lansdown, T.C.; Brook-Carter, N.; Kersloot, T. Distraction from multiple in-vehicle secondary tasks: Vehicle performance and mental workload implications. Ergonomics 2004, 47, 91–104. [Google Scholar] [CrossRef] [PubMed]
- Recarte, M.A.; Nunes, L.M. Mental workload while driving: Effects on visual search, discrimination, and decision making. J. Exp. Psychol. 2003, 9, 119. [Google Scholar] [CrossRef]
- Kanfer, R.; Ackerman, P.L. Motivation and cognitive abilities: An integrative/aptitude-treatment interaction approach to skill acquisition. J. Appl. Psychol. 1989, 74, 657–690. [Google Scholar] [CrossRef]
- Kanfer, R.; Kanfer, F.H. Goals and self-regulation: Applications of theory to work settings. Adv. Motiv. Achiev. 1991, 7, 287–326. Available online: https://www.researchgate.net/publication/261798604_Goals_and_self-regulation_Applications_of_theory_to_work_settings (accessed on 30 November 2023).
- Bandura, A. Perceived Self-Efficacy in Cognitive Development and Functioning. Educ. Psychol. 1993, 28, 117–148. [Google Scholar] [CrossRef]
- Paas, F.; Tuovinen, J.; Merriënboer, J.J.; Aubteen Darabi, A. A motivational perspective on the relation between mental effort and performance: Optimizing learner involvement in instruction. Educ. Technol. Res. Dev. 2005, 53, 25–34. [Google Scholar] [CrossRef]
- Dang, Y.; Zhang, Y.; Brown, S.A.; Chen, H. Examining the impacts of mental workload and task-technology fit on user acceptance of the social media search system. Inf. Syst. Front. 2020, 22, 697–718. [Google Scholar] [CrossRef]
- Li, M.; Feng, Z.; Zhang, W.; Zhu, S. What affects drivers’ satisfaction with autonomous vehicles in different road scenarios? Transp. Res. Part D Transp. Environ. 2021, 100, 103048. [Google Scholar] [CrossRef]
- Feldon, D.F.; Franco, J.; Chao, J.; Peugh, J.L.; Maahs-Fladung, C.A. Self-efficacy change associated with a cognitive load-based intervention in an undergraduate biology course. Learn. Instr. 2018, 56, 64–72. [Google Scholar] [CrossRef]
- Cats, O.; Larijani, A.N.; Ólafsdóttir, Á.; Burghout, W.; Andréasson, I.J.; Koutsopoulos, H.N. Bus-holding control strategies: Simulation-based evaluation and guidelines for implementation. Transp. Res. Rec. 2012, 2274, 100–108. [Google Scholar] [CrossRef]
- Shabanpour, R.; Golshani, N.; Shamshiripour, A.; Mohammadian, A. Eliciting preferences for adoption of fully automated vehicles using best-worst analysis. Transp. Res. Part C Emerg. Technol. 2018, 93, 463–478. [Google Scholar] [CrossRef]
- Vafaei-Zadeh, A.; Wong, T.; Hanifah, H.; Teoh, A.P.; Nawaser, K. Modelling electric vehicle purchase intention among generation Y consumers in Malaysia. Res. Transp. Bus. Manag. 2022, 43, 100784. [Google Scholar] [CrossRef]
- Jayasingh, S.; Girija, T.; Arunkumar, S. Factors Influencing Consumers’ Purchase Intention towards Electric Two-Wheelers. Sustainability 2021, 13, 12851. [Google Scholar] [CrossRef]
- Zhang, C.; Zhang, R.; Gan, Y.; Li, D.; Rhodes, R.E. Predicting transport-related cycling in Chinese employees using an integration of perceived physical environment and social cognitive factors. Transp. Res. Part F Traffic Psychol. Behav. 2019, 64, 424–439. [Google Scholar] [CrossRef]
- Ma, Y.; Wang, H.; Kong, R. The effect of policy instruments on rural households’ solid waste separation behavior and the mediation of perceived value using SEM. Environ. Sci. Pollut. Res. 2020, 27, 19398–19409. [Google Scholar] [CrossRef] [PubMed]
- Dill, J.; Mohr, C.D.; Ma, L. How Can Psychological Theory Help Cities Increase Walking and Bicycling? J. Am. Plan. Assoc. 2014, 80, 36–51. [Google Scholar] [CrossRef]
- Venkatesh, V.; Morris, M.G.; Davis, G.B.; Davis, F.D. User acceptance of information technology: Toward a unified view. MIS Q. 2003, 27, 425–478. [Google Scholar] [CrossRef]
- Shi, X.; Zhang, L. Effects of altruism and burnout on driving behavior of bus drivers. Accid. Anal. Prev. 2017, 102, 110–115. [Google Scholar] [CrossRef]
- Fornell, C.; Larcker, D.F. Evaluating structural equation models with unobservable variables and measurement error. J. Mark. Res. 1981, 18, 39–50. [Google Scholar] [CrossRef]
- Graham, J.W. Missing Data Analysis: Making It Work in the Real World. Annu. Rev. Psychol. 2009, 60, 549–576. [Google Scholar] [CrossRef] [PubMed]
- Bergkvist, L.; Rossiter, J.R. The predictive validity of multiple-item versus single-item measures of the same construct. J. Mark. Res. 2007, 44, 175–184. [Google Scholar] [CrossRef]
- Chin, W.W. The Partial Least Squares Approach to Structural Equation Modeling; Lawrence Erlbaum: Mahwah, NJ, USA, 1998; pp. 295–336. [Google Scholar]
- Fornell, C.; Bookstein, F.L. Two structural equation models: LISREL and PLS applied to consumer exit-voice theory. J. Mark. Res. 1982, 19, 440–452. [Google Scholar] [CrossRef]
- Hair, J.F., Jr.; Black, W.C.; Babin, B.J.; Anderson, R.E.; Black, W.C.; Anderson, R.E. Multivariate Data Analysis; Pearson: London, UK, 2018; pp. 95–120. [Google Scholar]
- Hair, J.F.; Hult, G.T.M.; Ringle, C.M.; Sarstedt, M. A Primer on Partial Least Squares Structural Equation Modeling (PLS-SEM); Sage: Thousand Oaks, CA, USA, 2017; p. 165. [Google Scholar]
- Wixom, B.H.; Todd, P.A. A theoretical integration of user satisfaction and technology acceptance. Inf. Syst. Res. 2005, 16, 85–102. [Google Scholar] [CrossRef]
- Henseler, J.; Ringle, C.M.; Sinkovics, R.R. The Use of Partial Least Squares Path Modeling in International Marketing; Emerald Group: Bingley, UK, 2009; pp. 277–319. [Google Scholar] [CrossRef]
- Cohen, J. Statistical Power Analysis for the Behavioural Sciences; Lawrence Earlbaum Associates: Hillside, NJ, USA, 1988. [Google Scholar] [CrossRef]
- Amoako-Gyampah, K.; Salam, A.F. An extension of the technology acceptance model in an ERP implementation environment. Inf. Manag. 2004, 41, 731–745. [Google Scholar] [CrossRef]
- Liaw, S.S. Investigating students’ perceived satisfaction, behavioral intention, and effectiveness of e-learning: A case study of the Blackboard system. Comput. Educ. 2008, 51, 864–873. [Google Scholar] [CrossRef]
- Lu, Y.; Zhou, T.; Wang, B. Exploring Chinese users’ acceptance of instant messaging using the theory of planned behavior, the technology acceptance model, and the flow theory. Comput. Hum. Behav. 2009, 25, 29–39. [Google Scholar] [CrossRef]
- Venkatesh, V.; Bala, H. Technology acceptance model 3 and a research agenda on interventions. Decis. Sci. 2008, 39, 273–315. [Google Scholar] [CrossRef]
- Olsen, N.V.; Grunert, K.G.; Sonne, A.M. Consumer acceptance of high-pressure processing and pulsed-electric field: A review. Trends Food Sci. Technol. 2010, 21, 464–472. [Google Scholar] [CrossRef]
- Siegrist, M. A causal model explaining the perception and acceptance of gene technology. J. Appl. Soc. Psychol. 1999, 29, 2093–2106. [Google Scholar] [CrossRef]
- Terwel, B.W.; Harinck, F.; Ellemers, N.; Daamen, D.D. Competence-based and integrity-based trust as predictors of acceptance of carbon dioxide capture and storage (CCS). Risk Anal. 2009, 29, 1129–1140. [Google Scholar] [CrossRef] [PubMed]
- Armitage, C.J.; Conner, M. Efficacy of the theory of planned behaviour: A meta-analytic review. Br. J. Soc. Psychol. 2001, 40, 471–499. [Google Scholar] [CrossRef] [PubMed]
- Siegrist, M.; Cvetkovich, G.; Roth, C. Salient value similarity, social trust, and risk/benefit perception. Risk Anal. 2000, 20, 353–362. [Google Scholar] [CrossRef] [PubMed]
- Visschers, V.H.; Siegrist, M. How a nuclear power plant accident influences acceptance of nuclear power: Results of a longitudinal study before and after the Fukushima disaster. Risk Anal. 2013, 33, 333–347. [Google Scholar] [CrossRef]
- Strömberg, H.; Karlsson, I.C. Comparative effects of eco-driving initiatives aimed at urban bus drivers—Results from a field trial. Transp. Res. Part D Transp. Environ. 2013, 22, 28–33. [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
| Constructs | Item | Sources |
|---|---|---|
| Perceived benefit (PB) | PB1: Complying with instructions can improve the phenomenon of bus bunching. | Self-developed |
| PB2: Complying with instructions can make buses on the same route arrive at stops more regularly. | ||
| PB3: Complying with instructions can prevent passengers from waiting too long for a bus. | ||
| PB4: Complying with instructions can avoid excessive differences in the number of passengers carried between buses. | ||
| Perceived risk (PR) | PR1: Complying with instructions may lead to dissatisfaction among passengers on board. | Self-developed, items are from [26,28] |
| PR2: Complying with instructions may reduce driving safety. | ||
| PR3: Complying with the instructions may cause traffic congestion. | ||
| PR4: Complying with the instructions may reduce my work efficiency. | ||
| Self-efficacy (SE) | SE1: I have enough driving ability to comply with the instructions. | Modified from [66] |
| SE2: If I wanted to, I would be able to comply with the instructions. | ||
| SE3: If I wanted to, I am confident I could comply with the instructions. | ||
| Perceived controllability (PC) | PC1: Whether I can comply with the instructions completely depends on myself. | Modified from [62] |
| PC2: Complying with the instructions is completely under my control. | ||
| Trust (TR) | TR1: I believe that the process of generating instructions is professional, scientific, and reasonable. | Self-developed, items are from [69] |
| TR2: I believe that the technology can give accurate instructions according to actual road conditions. | ||
| TR3: I believe that the technology can provide useful guidance in practical situations. | ||
| TR4: I believe that the technology can provide useful guidance on my route. | ||
| Mental workload (MW) | MW1: Mental demand | Modified from [87] |
| MW2: Physical demand | ||
| MW3: Effort | ||
| MW4: Temporal demand | ||
| MW5: Frustration | ||
| Line infrastructure support (LIS) | LIS1: The infrastructure on my route is generally sufficient to support me in complying with the speed control instructions successfully. | Self-developed |
| LIS2: The design of the bus stops along my route (berthing resources, type of stop, etc.) is generally sufficient to support me in complying with the holding instructions successfully. | ||
| LIS3: The overall infrastructure on my route is sufficient to support me in complying with real-time control instructions. | ||
| Behavioral intention in peak hours(BIP) | BIP: Assuming I receive instructions from the control center during peak hours, I would intend to comply with the instructions. | Modified from [16,105] |
| Behavioral intention in off-peak hours (BIO) | BIO: Assuming I receive instructions from the control center during off-peak hours, I would intend to comply with the instructions. | Modified from [16,105] |
| Variable | Value | Frequency | Percentage |
|---|---|---|---|
| Gender | Male | 230 | 89.1% |
| Female | 28 | 10.9% | |
| Educational Background | Junior high school and below | 75 | 29.1% |
| High school diploma | 95 | 36.8% | |
| Technical training | 84 | 32.6% | |
| Undergraduate degree and above | 4 | 1.6% | |
| Age | 20–29 | 21 | 8.1% |
| 30–39 | 86 | 33.3% | |
| 40–49 | 111 | 43.0% | |
| >50 | 40 | 15.5% | |
| Bus driving experience on the current route/years | <4 | 124 | 48.1% |
| 5–9 | 65 | 25.2% | |
| 10–14 | 45 | 17.4% | |
| 15–19 | 12 | 4.7% | |
| >20 | 12 | 4.7% | |
| Bus driving experience/years | 0–4 | 66 | 25.6% |
| 5–9 | 63 | 24.4% | |
| 10–14 | 64 | 24.8% | |
| 15–19 | 34 | 13.2% | |
| >20 | 31 | 12.0% |
| Construct | Item | Factor Loading | Mean(SD) | VIF | Cronbach’s Alpha | CR | AVE |
|---|---|---|---|---|---|---|---|
| Perceived benefit (PB) | PB1 | 0.892 | 3.67(0.86) | 3.034 | 0.928 | 0.949 | 0.822 |
| PB2 | 0.930 | 3.70(0.83) | 4.308 | ||||
| PB3 | 0.933 | 3.59(0.91) | 4.341 | ||||
| PB4 | 0.869 | 3.58(0.87) | 2.513 | ||||
| Perceived risk (PR) | PR1 | 0.796 | 3.22(0.90) | 2.067 | 0.866 | 0.907 | 0.710 |
| PR2 | 0.733 | 3.06(0.93) | 1.758 | ||||
| PR3 | 0.855 | 3.16(0.93) | 2.772 | ||||
| PR4 | 0.905 | 3.17(0.88) | 3.541 | ||||
| Self-efficacy (SE) | SE1 | 0.911 | 3.66(0.82) | 2.846 | 0.922 | 0.951 | 0.866 |
| SE2 | 0.949 | 3.65(0.83) | 4.548 | ||||
| SE3 | 0.931 | 3.64(0.84) | 3.865 | ||||
| Perceived controllability (PC) | PC1 | 0.942 | 3.31(0.94) | 2.866 | 0.893 | 0.949 | 0.903 |
| PC2 | 0.958 | 3.37(0.93) | 2.866 | ||||
| Trust (TR) | TR1 | 0.855 | 3.59(0.80) | 2.362 | 0.930 | 0.950 | 0.827 |
| TR2 | 0.933 | 3.57(0.80) | 4.372 | ||||
| TR3 | 0.938 | 3.66(0.77) | 4.984 | ||||
| TR4 | 0.909 | 3.58(0.80) | 3.703 | ||||
| Mental workload (MW) | MW1 | 0.723 | 3.21(1.20) | 2.603 | 0.904 | 0.915 | 0.684 |
| MW2 | 0.760 | 3.23(1.30) | 3.060 | ||||
| MW3 | 0.807 | 3.22(1.30) | 3.074 | ||||
| MW4 | 0.917 | 3.43(1.30) | 3.283 | ||||
| MW5 | 0.911 | 3.22(1.24) | 2.539 | ||||
| Line infrastructure support (LIS) | LIS1 | 0.919 | 4.38(1.55) | 2.990 | 0.887 | 0.930 | 0.817 |
| LIS2 | 0.877 | 4.17(1.54) | 3.049 | ||||
| LIS3 | 0.915 | 4.37(1.58) | 2.128 | ||||
| Behavioral intention: peak hours (BIP) | BIP | 1.000 | 3.12(1.05) | 1.000 | 1.000 | 1.000 | 1.000 |
| Behavioral intention: off-peak hours (BIO) | BIO | 1.000 | 3.52(0.93) | 1.000 | 1.000 | 1.000 | 1.000 |
| PB | PR | SE | PC | TR | MW | LIS | BIP | BIO | |
|---|---|---|---|---|---|---|---|---|---|
| PB | 0.907 | ||||||||
| PR | −0.091 | 0.843 | |||||||
| SE | 0.580 | −0.142 | 0.931 | ||||||
| PC | 0.470 | −0.123 | 0.630 | 0.950 | |||||
| TR | 0.742 | −0.188 | 0.642 | 0.558 | 0.909 | ||||
| MW | −0.227 | 0.332 | −0.258 | −0.250 | −0.259 | 0.827 | |||
| LIS | 0.612 | −0.244 | 0.553 | 0.506 | 0.604 | −0.265 | 0.904 | ||
| BIP | 0.501 | −0.260 | 0.463 | 0.456 | 0.515 | −0.254 | 0.697 | 1.000 | |
| BIO | 0.635 | −0.171 | 0.511 | 0.378 | 0.651 | −0.105 | 0.598 | 0.590 | 1.000 |
| Hypothesis | Path Coefficient | p-Value | Supported? |
|---|---|---|---|
| H1: PB→BIP | 0.316 | 0.000 *** | Yes |
| H2: PB→BIO | 0.509 | 0.000 *** | Yes |
| H3: PR→BIP | −0.188 | 0.000 *** | Yes |
| H4: PR→BIO | −0.096 | 0.035 * | Yes |
| H5: SE→BIP | 0.123 | 0.169 | No |
| H6: SE→BIO | 0.202 | 0.025 * | Yes |
| H7: PC→BIP | 0.207 | 0.007 ** | Yes |
| H8: PC→BIO | −0.001 | 0.997 | No |
| H9: TR→PB | 0.742 | 0.000 *** | Yes |
| H10: TR→PR | −0.188 | 0.009 *** | Yes |
| H11: MW→SE | −0.258 | 0.000 *** | Yes |
| H12: LIS→PC | 0.506 | 0.000 *** | Yes |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, W.; Chen, Y.; Wang, Y.; Fang, X. Bus Drivers’ Behavioral Intention to Comply with Real-Time Control Instructions: An Empirical Study from China. Sustainability 2024, 16, 3623. https://doi.org/10.3390/su16093623
Chen W, Chen Y, Wang Y, Fang X. Bus Drivers’ Behavioral Intention to Comply with Real-Time Control Instructions: An Empirical Study from China. Sustainability. 2024; 16(9):3623. https://doi.org/10.3390/su16093623
Chicago/Turabian StyleChen, Weiya, Ying Chen, Yufen Wang, and Xiaoping Fang. 2024. "Bus Drivers’ Behavioral Intention to Comply with Real-Time Control Instructions: An Empirical Study from China" Sustainability 16, no. 9: 3623. https://doi.org/10.3390/su16093623
APA StyleChen, W., Chen, Y., Wang, Y., & Fang, X. (2024). Bus Drivers’ Behavioral Intention to Comply with Real-Time Control Instructions: An Empirical Study from China. Sustainability, 16(9), 3623. https://doi.org/10.3390/su16093623