
The Influence of Vehicle Color on Speed Perception in Nighttime Driving Conditions


Abstract
:1. Introduction
2. Materials and Methods
2.1. Carrying out the Experiment
2.2. Stimuli
Characteristics of the Driving Simulator
2.3. Research Procedure
2.4. Collecting and Processing Data
3. Results
3.1. Socio-Demographic Data
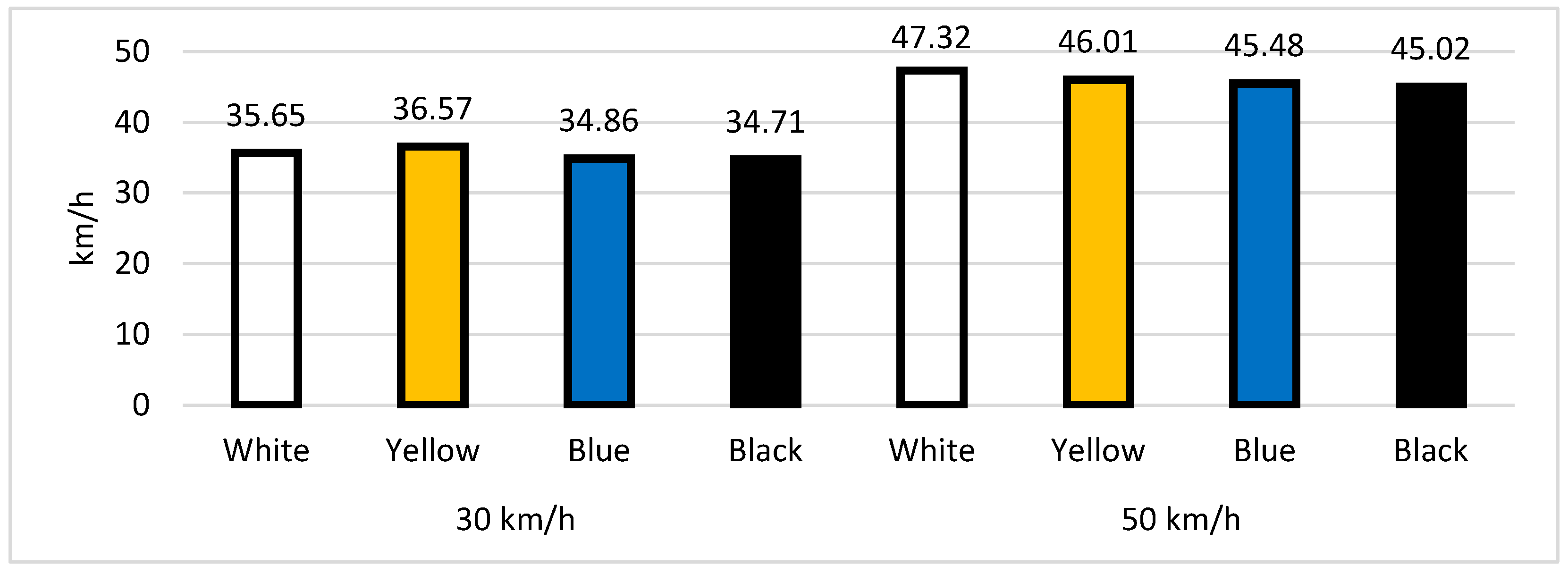
3.2. Evaluation of the Vehicle Speed Observed According to Colors
3.3. Gender-Based Disparities in the Assessment of Passenger Vehicle Speed for Different Colors
3.4. Factorial ANOVA Results
3.5. Respondents’ Place of Residence and Estimation of the Passenger Vehicles’ Speed with Different Colors
3.6. License Type and Assessment of the Passenger Vehicle Velocity for Various Colors
3.7. Years of Having a Driver’s License Class and Passenger Vehicle Speed Estimation for Different Colors
3.8. Driving Frequency and the Assessment of Speed for Passenger Vehicles of Different Colors
3.9. The Association Between Road Crashes and the Evaluation of Passenger Vehicle Speed for Different Colors
4. Discussions
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Ahmed, S.K.; Mohammed, M.G.; Abdulqadir, S.O.; El-Kader, R.G.A.; El-Shall, N.A.; Chandran, D.; Rehman, M.E.U.; Dhama, K. Road traffic accidental injuries and deaths: A neglected global health issue. Health Sci. Rep. 2023, 6, e1240. [Google Scholar] [CrossRef] [PubMed]
- Hermawan, I.; Firdausy, C.M.; Rambe, K.R.; Zuhdi, F.; Erwidodo, N.; Nugraheni, R.D.; Malisan, J.; Isnasari, Y.; Marpaung, E.; Asshagab, S.M. Road traffic facilities, traffic accidents, and poverty: Lesson learned from Indonesia. Transp. Res. Interdiscip. Perspect. 2024, 28, 101273. [Google Scholar] [CrossRef]
- World Health Organization. Road Traffic Injuries. 2024. Available online: https://www.who.int/news-room/fact-sheets/detail/road-traffic-injuries (accessed on 27 January 2025).
- Chauca, E.N.P.; Vaca, L.A.L.; Campaña, G.G.R. Crashworthiness analysis based on vehicle color and driver perception. Espirales Rev. Multidiscip. Investig. 2023, 47, 35–47. [Google Scholar] [CrossRef]
- World Health Organization. Global Status Report on Road Safety. 2023. Available online: https://iris.who.int/bitstream/handle/10665/375016/9789240086517-eng.pdf?sequence=1 (accessed on 27 January 2025).
- Lian, Y.; Yasmin, S.; Haque, M.M. Influence of road safety policies on the long-term trends in fatal Crashes: A Gaussian Copula-based time series count model with an autoregressive moving average process. Accid. Anal. Prev. 2024, 211, 107795. [Google Scholar] [CrossRef]
- Abdulrahman, R.; Almoshaogeh, M.; Haider, H.; Alharbi, F.; Jamal, A. Development and application of a risk analysis methodology for road traffic accidents. Alex. Eng. J. 2025, 111, 293–305. [Google Scholar] [CrossRef]
- Road Safety Agency. Statistical Report on the State of Traffic Safety in the Republic of Serbia. 2023. Available online: https://www.abs.gov.rs/admin/upload/documents/20231010092110-statisticki-izvestaj-o-stanju-bezbednosti-saobracaja-u-republici-srbiji-za-2022.-godinu.pdf (accessed on 27 January 2025).
- Peña-García, A.; de Oña Lopez, R.; Espín Estrella, A.; Aznar Dols, F.; Calvo Poyo, F.J.; Molero Mesa, E.; de Oña López, J. Influence of daytime running lamps on visual reaction time of pedestrians when detecting turn indicators. J. Saf. Res. 2010, 41, 385–389. [Google Scholar] [CrossRef]
- Cavallo, V.; Pinto, M. Are car daytime running lights detrimental to motorcycle conspicuity? Accid. Anal. Prev. 2012, 49, 78–85. [Google Scholar] [CrossRef]
- Sparks, G.A.; Neudore, R.D.; Smith, A.E.; Wapman, K.R.; Zador, P.L. The effect of daytime running lights on crashes between two vehicles in Saskatchewan: A study of a government fleet. Accid. Anal. Prev. 1993, 25, 619–625. [Google Scholar] [CrossRef]
- Pešić, D.; Trifunović, A.; Ivković, I.; Čičević, S.; Žunjić, A. Evaluation of the effects of daytime running lights for passenger cars. Transp. Res. Part F Traffic Psychol. Behav. 2019, 66, 252–261. [Google Scholar] [CrossRef]
- Lee, Y.M.; Sheppard, E. The effect of lighting conditions and use of headlights on drivers’ perception and appraisal of approaching vehicles at junctions. Ergonomics 2018, 61, 444–455. [Google Scholar] [CrossRef]
- Marković, N.; Ivanišević, T.; Čičević, S.; Trifunović, A. Fuzzy Logic Model for Assessing Accident Proneness Based on Passenger Vehicle Speed in Real and Virtual Traffic Conditions. Mathematics 2024, 12, 421. [Google Scholar] [CrossRef]
- Simović, S.; Ivanišević, T.; Trifunović, A.; Čičević, S.; Taranović, D. What affects the e-bicycle speed perception in the era of eco-sustainable mobility: A driving simulator study. Sustainability 2021, 13, 5252. [Google Scholar] [CrossRef]
- Ivanišević, T.; Ivković, I.; Čičević, S.; Trifunović, A.; Pešić, D.; Vukšić, V.; Simović, S. The impact of daytime running (LED) lights on motorcycles speed estimation: A driving simulator study. Transp. Res. Part F Traffic Psychol. Behav. 2022, 90, 47–57. [Google Scholar]
- Trifunović, A.; Ivanišević, T.; Čičević, S.; Simović, S.; Vukšić, V.; Slović, Ž. Do Statistics Show Differences between Distance Estimations of 3D Objects in the Traffic Environment Using Glances, Side View Mirrors, and Camera Display? Mathematics 2023, 11, 1258. [Google Scholar] [CrossRef]
- Milić, A. Traffic Psychology; Faculty of Transport and Traffic Engineering: Belgrade, Serbia, 2007. [Google Scholar]
- Eustace, D.; Alanazi, F.K.; Hovey, P.W. Investigation of the effect of vehicle color on safety. Adv. Transp. Stud. 2019, 47, 77–88. [Google Scholar]
- Newstead, S.; D’Elia, A. Does vehicle colour influence crash risk? Saf. Sci. 2010, 48, 1327–1338. [Google Scholar] [CrossRef]
- Koenderink, J.; van Doorn, A.; Witzel, C.; Gegenfurtner, K. Hues of color afterimages. i-Perception 2020, 11, 2041669520903553. [Google Scholar] [CrossRef]
- Jonauskaite, D.; Parraga, C.A.; Quiblier, M.; Mohr, C. Feeling blue or seeing red? Similar patterns of emotion associations with colour patches and colour terms. i-Perception 2020, 11, 2041669520902484. [Google Scholar]
- Grandi, B.; Cardinali, M.G. Colours and price offers: How different price communications can affect sales and customers’ perceptions. J. Retail. Consum. Serv. 2022, 68, 103073. [Google Scholar] [CrossRef]
- Sawilla, S.; Keller, C.; Schlegel, T. Conflict Situations and Driving Behavior in Road Traffic—An Analysis Using Eyetracking and Stress Measurement on Car Drivers. In Lecture Notes in Computer Science; Springer International Publishing: Berlin/Heidelberg, Germany, 2020; pp. 86–103. [Google Scholar] [CrossRef]
- Wood, J.M. Nighttime driving: Visual, lighting and visibility challenges. Ophthalmic Physiol. Opt. 2020, 40, 187–201. [Google Scholar]
- Myburgh, L. Investigating Contrast Sensitivity as Part of the Assessment of visual Requirements for Driving. Master’s Thesis, University of the Free State, Bloemfontein, South Africa, 2023. [Google Scholar]
- Tang, Y.B. The Effects of Age and Glare on Driving. 2012. Available online: https://theses.lib.polyu.edu.hk/handle/200/6949 (accessed on 28 January 2025).
- Schütz, A.C.; Billino, J.; Bodrogi, P.; Polin, D.; Khanh, T.Q.; Gegenfurtner, K.R. Robust underestimation of speed during driving: A field study. Perception 2015, 44, 1356–1370. [Google Scholar] [CrossRef] [PubMed]
- Young, K.L.; Salmon, P.M.; Cornelissen, M. Distraction-induced driving error: An on-road examination of the errors made by distracted and undistracted drivers. Accid. Anal. Prev. 2013, 58, 218–225. [Google Scholar] [CrossRef] [PubMed]
- Krstačić, R.; Žužić, A.; Orehovački, T. Safety Aspects of In-Vehicle Infotainment Systems: A Systematic Literature Review from 2012 to 2023. Electronics 2024, 13, 2563. [Google Scholar]
- Mahomed, A.S.; Saha, A.K. Driver Posture Recognition: A Review. IEEE Access 2024, 12, 176301–176345. [Google Scholar] [CrossRef]
- Hu, C.; Bai, X.; Qi, L.; Chen, P.; Xue, G.; Mei, L. Vehicle color recognition with spatial pyramid deep learning. IEEE Trans. Intell. Transp. Syst. 2015, 16, 2925–2934. [Google Scholar]
- Wen, Y.; Lin, J.; Ming, Y.; Zhang, J.; Wu, X.; Bao, L.; Yu, K.; Xiao, Y. Role of inhibition in overcoming interferences of misconception under similar feature saliency: An eye-tracking study of the projectile motion problem. Phys. Rev. Phys. Educ. Res. 2024, 20, 020121. [Google Scholar] [CrossRef]
- Will, S. Development of a Presence Model for Driving Simulators Based on Speed Perception in a Motorcycle Riding Simulator. Ph.D. Thesis, Universität Würz-burg, Würz-burg, Germany, 2017. [Google Scholar]
- Senić, A.; Dobrodolac, M.; Stojadinović, Z. Development of Risk Quantification Models in Road Infrastructure Projects. Sustainability 2024, 16, 7694. [Google Scholar] [CrossRef]
- Senić, A.; Simić, N.; Dobrodolac, M.; Stojadinović, Z. Development of a Hybrid Model for Risk Assessment and Management in Complex Road Infrastructure Projects. Appl. Sci. 2025, 15, 2736. [Google Scholar] [CrossRef]
- Senić, A.; Dobrodolac, M.; Stojadinović, Z. Predicting Extension of Time and Increasing Contract Price in Road Infrastructure Projects Using a Sugeno Fuzzy Logic Model. Mathematics 2024, 12, 2852. [Google Scholar] [CrossRef]
- Senić, A.; Ivanović, M.; Dobrodolac, M.; Stojadinović, Z. Prioritization of Preventive Measures: A Multi-Criteria Approach to Risk Mitigation in Road Infrastructure Projects. Mathematics 2025, 13, 278. [Google Scholar] [CrossRef]
- Elvik, R. Some implications of an event-based definition of exposure to the risk of road accident. Accid. Anal. Prev. 2015, 76, 15–24. [Google Scholar] [CrossRef] [PubMed]
- Yuan, J.; Jiao, Z.; Chai, J.; Farnham, C.; Emura, K. Reflective coatings: Enhancing building performance and sustainability. Nano-Struct. Nano-Objects 2024, 39, 101296. [Google Scholar] [CrossRef]
- Rossi, G.; Iacomussi, P.; Zinzi, M. Lighting implications of urban mitigation strategies through cool pavements: Energy savings and visual comfort. Climate 2018, 6, 26. [Google Scholar] [CrossRef]
- Wang, W.; Qie, T.; Yang, C.; Liu, W.; Xiang, C.; Huang, K. An intelligent lane-changing behavior prediction and decision-making strategy for an autonomous vehicle. IEEE Trans. Ind. Electron. 2021, 69, 2927–2937. [Google Scholar] [CrossRef]
- Qu, D.; Zhang, K.; Song, H.; Wang, T.; Dai, S. Analysis of Lane-Changing Decision-Making Behavior of Autonomous Vehicles Based on Molecular Dynamics. Sensors 2022, 22, 7748. [Google Scholar] [CrossRef]
- Shin, S.; Lee, S. Correlation between Car Accident and Car Color for Intelligent Service. J. Intell. Inf. Syst. 2013, 19, 11–20. [Google Scholar] [CrossRef]
- Solomon, S.S.; King, J.G. Influence of color on fire vehicle accidents. J. Saf. Res. 1995, 26, 41–48. [Google Scholar] [CrossRef]
- Lardelli-Claret, P.; Luna-del-Castillo, D.; Jimenez-Moleon, J.; Femia-Marzo, P.; Moreno-Abril, O.; Bueno-Cavanillas, A. Does Vehicle Color Influence the Risk of being Passively Involved in a Collision? Epidemiology 2002, 13, 721–724. [Google Scholar] [CrossRef]
- Furness, S.; Connor, J.; Robnson, E.; Norton, R.; Ameratunga, S.; Jackson, R. Car color and risk of car crash injury: Populationbased case control study. Br. Med. J. 2003, 327, 1455–1456. [Google Scholar]
- Nathan, R.A. What’s the Safest Color for a Motor Vehicle? Traffic Saf. 1969, 69, 13. [Google Scholar]
- Monash University. An Investigation into the Relationship Between Vehicle Colour and Crash Risk. 2007. Available online: https://www.monash.edu/__data/assets/pdf_file/0007/216475/An-investigation-into-the-relationship-between-vehicle-colour-and-crash-risk.pdf (accessed on 28 January 2025).
- Owusu-Ansah, S.O. Investigation of the Relationship Between Vehicle Color and Safety. Master’s Thesis, University of Dayton, Dayton, OH, USA, 2010. [Google Scholar]
- Wu, C. The effects of vehicle color and travel direction on perceived speed error varies by judgment type among older pedestrians. Traffic Inj. Prev. 2024, 25, 925–932. [Google Scholar] [CrossRef] [PubMed]
- Wu, C. Impacts of brightness contrast, road environment complexity, travel direction and judgement type on speed perception errors among older adult pedestrians’ road-crossing decision-making. J. Ageing 2024, 43, 725–732. [Google Scholar] [CrossRef] [PubMed]
- Bener, A.; Crundall, D. Role of gender and driver behaviour in road traffic crashes. Int. J. Crashworthiness 2008, 13, 331–336. [Google Scholar] [CrossRef]
- Atombo, C.; Wu, C. Traffic safety climate factors in explaining driving behaviours and traffic crash involvement: Comparative study among male and female drivers. J. Road Saf. 2022, 33, 49–62. [Google Scholar] [CrossRef]
- Oltedal, S.; Rundmo, T. The effects of personality and gender on risky driving behaviour and accident involvement. Saf. Sci. 2006, 44, 621–628. [Google Scholar] [CrossRef]
- Gwyther, H.; Holland, C. The effect of age, gender and attitudes on self-regulation in driving. Accid. Anal. Prev. 2012, 45, 19–28. [Google Scholar] [CrossRef]
- Lim, T.; Stephens, A.N.; Sheppard, D. Personality and demographic differences in the perceived risks of potentially timid driving behaviours. Transp. Res. Part F Traffic Psychol. Behav. 2022, 88, 197–207. [Google Scholar] [CrossRef]
- Zhou, N.; Dong, W.; Wang, J.; Paul, J.C. Simulating human visual perception in nighttime illumination. Tsinghua Sci. Technol. 2009, 14, 133–138. [Google Scholar] [CrossRef]
- Liu, M.; Li, R.; Zhang, B.; Jiao, W.; Luo, T.; Portnov, B.A.; Zhang, H. Evaluation of perception and analysis of energy saving potential of nighttime illumination in different types of residential areas: A case study of Dalian, China. Sustain. Cities Soc. 2024, 114, 105753. [Google Scholar] [CrossRef]
- Gibson, J.J. A Theory of Direct Visual Perception. In The Psychology of Knowing; Royce, J., Rozenboom, W., Eds.; Gordon & Breach: New York, NY, USA, 1972. [Google Scholar]
- Čolić, Z. Multimedia Production; School of Electrical and Computer Engineering of Applied Studies: Belgrade, Serbia, 2011. [Google Scholar]
- Pešić, A.; Stephens, A.N.; Newnam, S.; Čičević, S.; Pešić, D.; Trifunović, A. Youth Perceptions and Attitudes towards Road Safety in Serbia. Systems 2022, 10, 191. [Google Scholar] [CrossRef]
- Law on Road Traffic Safety Publication No. 41/2009, 53/2010, 101/2011, 32/2013, 2/2018, 87/2018 23/2019, 128/2020 and 76/2023. 2023. Available online: https://www.paragraf.rs/propisi/zakon_o_bezbednosti_saobracaja_na_putevima.html (accessed on 28 January 2025).
- Kruijff, E.; Orlosky, J.; Kishishita, N.; Trepkowski, C.; Kiyokawa, K. The influence of label design on search performance and noticeability in wide field of view augmented reality displays. IEEE Trans. Vis. Comput. Graph. 2018, 25, 2821–2837. [Google Scholar] [CrossRef] [PubMed]
- Goedicke, D.; Li, J.; Evers, V.; Ju, W. Vr-oom: Virtual reality on-road driving simulation. In Proceedings of the 2018 CHI Conference on Human Factors in Computing Systems, Montreal, QC, Canada, 21–26 April 2018; pp. 1–11. [Google Scholar]
- Li, N.; Jain, J.J.; Busso, C. Modeling of driver behavior in real world scenarios using multiple noninvasive sensors. IEEE Trans. Multimed. 2013, 15, 1213–1225. [Google Scholar] [CrossRef]
- Jones, P.R.; Ungewiss, J.; Eichinger, P.; Wörner, M.; Crabb, D.P.; Schiefer, U. Contrast sensitivity and night driving in older people: Quantifying the relationship between visual acuity, contrast sensitivity, and hazard detection distance in a night-time driving simulator. Front. Hum. Neurosci. 2022, 16, 914459. [Google Scholar] [CrossRef] [PubMed]
- Hwang, A.D.; Peli, E. Development of a headlight glare simulator for a driving simulator. Transp. Res. Part C Emerg. Technol. 2013, 32, 129–143. [Google Scholar] [CrossRef]
- Hecht, D.; Reiner, M.; Karni, A. Multisensory enhancement: Gains in choice and in simple response times. Exp. Brain Res. 2008, 189, 133–143. [Google Scholar] [CrossRef]
- Peng, X.; Zhang, Y.; Jiménez-Navarro, D.; Serrano, A.; Myszkowski, K.; Sun, Q. Measuring and predicting multisensory reaction latency: A probabilistic model for visual-auditory integration. IEEE Trans. Vis. Comput. Graph. 2024, 30, 7364–7374. [Google Scholar] [CrossRef]
- Berthoz, A.; Bles, W.; Bülthoff, H.H.; Grácio, B.C.; Feenstra, P.; Filliard, N.; Wentink, M. Motion scaling for high-performance driving simulators. IEEE Trans. Hum. Mach. Syst. 2013, 43, 265–276. [Google Scholar] [CrossRef]
- Perello-March, J.R.; Burns, C.G.; Birrell, S.A.; Woodman, R.; Elliott, M.T. Physiological measures of risk perception in highly automated driving. IEEE Trans. Intell. Transp. Syst. 2022, 23, 4811–4822. [Google Scholar] [CrossRef]
- Eloholma, M.; Ketomäki, J.; Orreveteläinen, P.; Halonen, L. Visual performance in night-time driving conditions. Ophthalmic Physiol. Opt. 2006, 26, 254–263. [Google Scholar] [CrossRef]
- Kimlin, J.A.; Black, A.A.; Wood, J.M. Nighttime driving in older adults: Effects of glare and association with mesopic visual function. Opthalmology Vis. Sci. 2017, 58, 2796–2803. [Google Scholar] [CrossRef]
- Ryu, J.; Hashimoto, N.; Sato, M. Influence of resolution degradation on distance estimation in virtual space displaying static and dynamic image. In Proceedings of the 2005 International Conference on Cyberworlds (CW’05), Singapore, 23–25 November 2025; pp. 8–50. [Google Scholar]
- Zhu, S.; Zhang, X. Enabling high-precision visible light localization in today’s buildings. In Proceedings of the 15th Annual International Conference on Mobile Systems, Applications, and Services, Niagara Falls, NY, USA, 19–23 June 2017; pp. 96–108. [Google Scholar]
- Evans, T.; Stuckey, R.; Macdonald, W. Young drivers’ perceptions of risk and difficulty: Day versus night. Accid. Anal. Prev. 2020, 147, 105753. [Google Scholar] [CrossRef] [PubMed]
- Hassan, H.M.; Abdel-Aty, M.A. Exploring the safety implications of young drivers’ behavior, attitudes and perceptions. Accid. Anal. Prev. 2013, 50, 361–370. [Google Scholar] [CrossRef] [PubMed]
- Evans, T.; Stuckey, R.; Macdonald, W. Young drivers’ perception of hazards: Variation with experience and day versus night. Transp. Res. Part F Traffic Psychol. Behav. 2022, 88, 258–280. [Google Scholar] [CrossRef]
- Fällman, K. Cognition, Everyday Function and Driving Performance in Old Age; Linköping University Electronic Press: Linköping, Sweden, 2024. [Google Scholar]
- Dukic Willstrand, T.; Broberg, T.; Selander, H. Driving characteristics of older drivers and their relationship to the useful field of view test. Gerontology 2017, 63, 180–188. [Google Scholar] [CrossRef]
- Tomczak, M.V. Cognitive Impairment in Relation to On-Road Driving. Master’s Thesis, Department of Psychology, University of Alberta, Edmonton, AB, Canada, 2022. [Google Scholar]
- Lohman, D.F. The effect of speed-accuracy tradeoff on sex differences in mental rotation. Percept. Psychophys. 1986, 39, 427–436. [Google Scholar] [CrossRef]
- Brunner, F.; Ruedl, G.; Kopp, M.; Burtscher, M. Factors associated with the perception of speed among recreational skiers. PLoS ONE 2015, 10, e0132002. [Google Scholar] [CrossRef]
- Diederichs, F.; Muthumani, A.; Feierle, A.; Galle, M.; Mathis, L.A.; Bopp-Bertenbreiter, V.; Bengler, K. Improving driver performance and experience in assisted and automated driving with visual cues in the steering wheel. IEEE Trans. Intell. Transp. Syst. 2022, 23, 4843–4852. [Google Scholar] [CrossRef]
- Shinar, D. Driver information processing: Attention, perception, reaction time, and comprehension. In Traffic Safety and Human Behavior; Emerald Publishing Limited: Leeds, UK, 2017; pp. 189–256. [Google Scholar]
- Struckman-Johnson, C.; Gaster, S.; Struc Stone kman-Johnson, D.; Johnson, M.; May-Shinagle, G. Gender differences in psychosocial predictors of texting while driving. Accid. Anal. Prev. 2015, 74, 218–228. [Google Scholar] [CrossRef]
- Cordellieri, P.; Baralla, F.; Ferlazzo, F.; Sgalla, R.; Piccardi, L.; Giannini, A.M. Gender effects in young road users on road safety attitudes, behaviors and risk perception. Front. Psychol. 2016, 7, 1412. [Google Scholar] [CrossRef]
- Stone, L.S.; Thompson, P. Human speed perception is contrast dependent. Vis. Res. 1992, 32, 1535–1549. [Google Scholar] [CrossRef]
- Blakemore, M.R.; Snowden, R.J. The effect of contrast upon perceived speed: A general phenomenon? Perception 1999, 28, 33–48. [Google Scholar] [CrossRef] [PubMed]
- Bobick, A.F. Movement, activity and action: The role of knowledge in the perception of motion. Philosophical Transactions of the Royal Society of London. Ser. B Biol. Sci. 1997, 352, 1257–1265. [Google Scholar] [CrossRef] [PubMed]
- De Silva, H.R. An analysis of the visual perception of movement 1. Br. J. Psychol. Gen. Sect. 1929, 19, 268–305. [Google Scholar]
- Elliot, A.J.; Maier, M.A. Color psychology: Effects of perceiving color on psychological functioning in humans. Annu. Rev. Psychol. 2014, 65, 95–120. [Google Scholar] [CrossRef]
- Livingstone, M.; Hubel, D. Segregation of form, color, movement, and depth: Anatomy, physiology, and perception. Science 1988, 240, 740–749. [Google Scholar] [CrossRef]
- Chen, C.; Mitsudo, H. The gender-based facing bias in 3-D biological motion perception. Perception 2023, 52, 183–194. [Google Scholar] [CrossRef]
- Liu, D.Y.; Li, M.; Yu, J.; Gao, Y.; Zhang, X.; Hu, D.; Zhu, J. Sex differences in the human brain related to visual motion perception. Biol. Sex Differ. 2024, 15, 92. [Google Scholar] [CrossRef]
- Agnew, H.C.; Phillips, L.H.; Pilz, K.S. Visual attention, biological motion perception, and healthy ageing. Psychol. Res. 2020, 84, 625–642. [Google Scholar] [CrossRef]
- Allen, T.; McClure, R.; Newstead, S.V.; Lenné, M.G.; Hillard, P.; Symmons, M.; Day, L. Exposure factors of Victoria’s active motorcycle fleet related to serious injury crash risk. Traffic Inj. Prev. 2016, 17, 870–877. [Google Scholar] [CrossRef]
- Austin, R. Traffic Violence, Disparate Pedestrian Deaths, and Transportation Justice via Vision Zero; Public Law Research Paper; University of Pennsylvania: Philadelphia, PA, USA, 2024. [Google Scholar]
- Hussain, Q.; Alhajyaseen, W.K.; Pirdavani, A.; Reinolsmann, N.; Brijs, K.; Brijs, T. Speed perception and actual speed in a driving simulator and real-world: A validation study. Transp. Res. Part F Traffic Psychol. Behav. 2019, 62, 637–650. [Google Scholar] [CrossRef]
- Ivan, K.; Haidu, I.; Benedek, J.; Ciobanu, S.M. Identification of traffic accident risk-prone areas under low-light conditions. Nat. Hazards Earth Syst. Sci. 2015, 15, 2059–2068. [Google Scholar] [CrossRef]
- King, M.J.; Wood, J.M.; Lacherez, P.F.; Marszalek, R.P. Optimism about safety and group-serving interpretations of safety among pedestrians and cyclists in relation to road use in general and under low light conditions. Accid. Anal. Prev. 2012, 44, 154–159. [Google Scholar] [CrossRef] [PubMed]
- Kovačević, M. Hijacked: How Neoliberalism Turned the Work Ethic against Workers and How Workers Can Take It Back. J. Appl. Philos. 2024, 41, 2. [Google Scholar] [CrossRef]
- Jurecki, R.S.; Stańczyk, T.L.; Ziubiński, M. Analysis of the Structure of Driver Maneuvers in Different Road Conditions. Energies 2022, 15, 7073. [Google Scholar] [CrossRef]
- Biassoni, F.; Gnerre, M. Understanding Elderly Drivers’ Perception of Advanced Driver Assistance Systems: A Systematic Review of Perceived Risks, Trust, Ease of Use, and Usefulness. Geriatrics 2024, 9, 144. [Google Scholar] [CrossRef]
- Chen, X.; Hu, R.; Luo, K.; Wu, H.; Biancardo, S.A.; Zheng, Y.; Xian, J. Intelligent ship route planning via an A∗ search model enhanced double-deep Q-network. Ocean Eng. 2025, 327, 120956. [Google Scholar] [CrossRef]
- Chen, S.; Piao, L.; Zang, X.; Luo, Q.; Li, J.; Yang, J.; Rong, J. Analyzing differences of highway lane-changing behavior using vehicle trajectory data. Phys. A Stat. Mech. Its Appl. 2023, 624, 128980. [Google Scholar] [CrossRef]
- Simić, N.; Ivanišević, N.; Nedeljković, Ð.; Senić, A.; Stojadinović, Z.; Ivanović, M. Early Highway Construction Cost Estimation: Selection of Key Cost Drivers. Sustainability 2023, 15, 5584. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
| Demographic Profile of the Respondents | |||||
|---|---|---|---|---|---|
| Age | Residential Area | Education Level | |||
| 15–25 | 55.3% | City center | 31% | Primary school | 8.6% |
| 26–35 | 18.6% | Narrow urban area | 16.5% | Secondary school | 43.8% |
| 46–55 | 14.9% | Wider urban area | 20.5% | Bachelor’s degree | 27.2% |
| 55+ | 11.20% | Rural | 21.7% | Master’s degree | 15.4% |
| Suburban | 10.3% | Doctoral studies (PhD) | 5.0% | ||
| Driving Profile of Participants | |||||
| Driver’s License Categories | Driving Experience | Driving Frequency | |||
| Motorcycles | 5.2% | Less than 3 years | 32.9% | Daily | 72.7% |
| Passenger vehicles | 78.3% | 3–5 years | 24.8% | 3 to 5 times per week | 18.1% |
| Trucks | 11.8% | 5–10 years | 28.6% | Less than 3 times per week | 6.8% |
| Buses | 3.1% | >10 years | 13.7% | Rarely or never drives | 2.4% |
| Others | 4.6% | ||||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Marković, N.; Trifunović, A.; Ivanišević, T.; Simović, S. The Influence of Vehicle Color on Speed Perception in Nighttime Driving Conditions. Sustainability 2025, 17, 3591. https://doi.org/10.3390/su17083591
Marković N, Trifunović A, Ivanišević T, Simović S. The Influence of Vehicle Color on Speed Perception in Nighttime Driving Conditions. Sustainability. 2025; 17(8):3591. https://doi.org/10.3390/su17083591
Chicago/Turabian StyleMarković, Nenad, Aleksandar Trifunović, Tijana Ivanišević, and Sreten Simović. 2025. "The Influence of Vehicle Color on Speed Perception in Nighttime Driving Conditions" Sustainability 17, no. 8: 3591. https://doi.org/10.3390/su17083591
APA StyleMarković, N., Trifunović, A., Ivanišević, T., & Simović, S. (2025). The Influence of Vehicle Color on Speed Perception in Nighttime Driving Conditions. Sustainability, 17(8), 3591. https://doi.org/10.3390/su17083591