1. Introduction
Five years after the official announcement of providing the positioning, navigation and timing (PNT) service around Asia-Pacific region, Chinese BeiDou Navigation Satellite System (BeiDou) has stepped into a new era recently. On 6 November 2017, two new-generation BeiDou satellites (BeiDou-3) have been successfully launched to medium earth orbit (MEO) to provide the global PNT service. Once the space segment is successfully deployed, BeiDou will possess global service capability comprising totally 35 satellites distributed in geostationary orbit (GEO), inclined geosynchronous orbit (IGSO) and MEO around 2020. In order to validate the new features of BeiDou-3 satellites, including new signals, inter-satellite link technology, and onboard frequency standards, two IGSO and three MEO experimental satellites have been launched.
Up to now, the published in-orbit-validation (IOV) results have demonstrated the significant improvements of BeiDou-3 satellites w.r.t the regional BeiDou satellites (BeiDou-2). The inter-satellite link technology does not only facilitate high accuracy precise orbit determination (POD), but also enables autonomous navigation as well as improves the independency and stability of BeiDou system [
1]. The quality of BeiDou-3 signals is comparable to that of GPS L1/L2/L5 and Galileo E1/E5a/E5b signals, and the elevation-dependent code biases, which have been previously identified to exist in the code observations of the BeiDou-2 satellites, seem to be not obvious for BeiDou-3 satellites, as demonstrated in [
2]. These improvements ease the precise data processing of BeiDou. The stability of onboard frequency standards has been improved by a factor of 10, and can be compared to the latest type of rubidium atomic frequency standards employed onboard the GPS IIF satellites, as well as the passive hydrogen masers used onboard the Galileo satellites. A continuous yaw-steering (YS) attitude model is used to avoid the significant orbit accuracy degeneration when a satellite switches its attitude mode [
3]. Thanks to the above improvements, the better POD performance has been achieved for BeiDou-3 experimental satellites, except for BeiDou-3 I2-S (PRN C32) satellite, for which an apparent linear sun elongation angle (
ε angle) dependent systematic error has been observed in the satellite laser ranging (SLR) residuals.
Without any doubt, the systematic error is original form the deficiency of non-gravitational force models, particularly in the solar radiation pressure (SRP) model. The similar error was also observed for European Galileo and Japanese QZSS Michibiki satellite’s orbits determined with the 5-parameter extended CODE orbit model (called ECOM1 in this study) [
4,
5]. To reduce the deficiency of the ECOM1 for the Galileo satellites, an a priori SRP model based on a generic box-wing model (hereafter called cuboid model) in YS mode to augment the ECOM1 was established [
6]. With this a priori model, the peak magnitude of radial orbit errors was reduced from presently 20 cm down to 5 cm for Galileo IOV satellites outside eclipse phases, and similar performance has also been achieved for Galileo Full-Operational-Capability (FOC) satellites [
7]. With approximate body dimensions, optical properties as well as mass, the QZSS Michibiki’s a priori cuboid model has been obtained, which improves the orbit to a better than 10 cm RMS consistency with SLR measurements [
8]. The reasons for that type of model are that Galileo and QZSS Michibiki satellites have a markedly elongated shape instead of a cuboid one, as well as a large area-to-mass ratio. Alternatively, the revised version of ECOM (ECOM2) also has the potential to reduce such kind of error, i.e., for Galileo and QZSS Michibiki satellites [
9], although the primer aim of the model is to reduce the draconitic errors in GNSS geodetic products [
10]. Besides, the adjustable box-wing model (ABW) can also reduce this error, because the model is derived from the physical theory, and can fit real tracking data well, as shown for QZSS Michibiki satellite [
11].
In this study, the performances of the above mentioned ECOM1, ECOM2, and ABW models for BeiDou-3 I2-S will be compared and analyzed. In addition, the a priori SRP models to augment the ECOM1 model will be derived based on analytical cuboid box model and empirically spectra analysis. We prefer the a priori model, as the additionally introduced higher-order harmonics in ECOM2 may increase the sensitivity to other modeling errors and result in a slightly degraded performance during certain mission phase. For ABW model, problems of observability likewise affect its use, as there are quite strong correlations between the estimation parameters.
Following short descriptions of the yaw attitude and body structure of BeiDou-3 I2-S satellite, the ECOM1 and ECOM2 model, as well as the ABW and cuboid models will be presented in
Section 2. In
Section 3, the comparison and analysis of performance of these models for BeiDou-3 I2-S will be presented. Based on these results, an empirical a priori model to augment the ECOM1 will be established by fitting the reconstructed SRP acceleration to the predetermined formulae after spectral density analysis with fast Fourier transformation (FFT) approach in
Section 4. In addition, the parameters for the cuboid model will also be presented. Afterwards, the developed models will be validated in
Section 5. Finally, this study is summarized and concluded in
Section 6.
2. Characteristics and SRP Models for BeiDou-3 I2-S Satellite
The details of the optical and geometrical properties, as well as the attitude of satellite bus and solar panels (SP), are essential for the modeling of non-gravitational forces. In this section, these data as well as SRP models for BeiDou-3 I2-S satellite will be presented.
2.1. Attitude
The estimated yaw attitudes of the BeiDou-3 I2-S satellite demonstrated that the continuous yaw attitude has been adopted instead of orbital normal mode used by BeiDou-2 IGSO and MEO satellites when BeiDou-3 I2-S is in eclipse season [
3], and that the satellite experienced midnight- or noon-turn maneuvers when the sun elevation angle above the orbital plane (
β angle) was in the range of [−3°, +3°] and the orbital angle was in the range of approximately [−6°, 6°] or [174°, 186°]. The midnight- and noon-turn yaw maneuver model have been established by [
12], but not been used in this study. For other period, the nominal yaw attitude is used to describe the orientation of BeiDou-3 I2-S; in this case, the satellite body-fixed frame (
,
,
) is defined by the three vectors, respectively:
where
r is the geocentric vector of the satellite and
is the unit vector pointing from the satellite to the Sun.
2.2. Satellite Structure
As described in [
3], BeiDou-3 experimental satellites are based on two different satellite platforms developed by China Academy of Space Technology (CAST) and the China Academy of Science (CAS). The CAS platform weighs approximately 848 kg, and has an elongated shape. On the other hand, the CAST IGSO platform has a cuboid shape and weighs 2800 kg. BeiDou-3 I2-S is believed to be developed based on CAST’s Dongfanghong-3A bus, which was also adopted by BeiDou-2 satellites. However, the structure of the satellite bus has changed to approximately 2 × 2.5 × 3.6 m. As there are no available optical properties for BeiDou-3 I2-S, the coarse values from BeiDou-2 IGSO and MEO satellites have been used.
Table 1 listed these initial values for satellite bus and SPs. As can been seen, the body of BeiDou-3 I2-S is also an elongated shape along
Z axis, similar to Galileo and QZSS Michibiki.
2.3. ECOM Model
As an empirical SRP model, the ECOM model was originally proposed in the 1990s [
4], and further develops the reduced and extended version [
5,
10]. The ECOM model decomposes the SRP acceleration into three orthogonal directions: the satellite-to-Sun direction (
), the nominal SP axis in YS mode (
), and the orthogonal axis (
)
Within ECOM model, the empirical SRP accelerations in the three directions at 1 astronomical unit (AU) are expressed as Equation (3) in a right-handed DYB frame for YS attitude in term of three constant accelerations (D0, Y0, and B0) and six one-cycle-per-revolution (1-cpr) accelerations (Dc, Ds, Yc, Ys, Bc, and Bs), where μ is the orbit angle; i.e., the argument of satellite with respect to the midnight point, i.e., the position where the satellite is far away from the Sun. Although this model can incorporate with an a priori model, good performance can also be obtained without such a priori model. Hence, the empirical reduced 5-parameter ECOM (called ECOM1 hereafter) is widely used to generate GNSS orbits. In this case, only three constant accelerations and two 1-cpr accelerations in B direction are estimated.
In recent years, however, it became obvious that the ECOM1 could introduce large draconitic error in GNSS geodetic products [
13,
14]. In order to reduce the error in the time series of IGS (International GNSS Service) products, ECOM2 model has been proposed by additional introduction of high-order harmonics in Equation (3) [
10], and expressed as
where the upper limit values,
,
, and
are defined by users, and
,
,
, and
are the SRP coefficients to be estimated, and
is the difference of the satellite’s argument of the latitude and the Sun’s argument of the latitude. As recommendation by [
10], the 2-cpr and 4-cpr terms in
D and the 1-cpr terms in
B direction is better to account for.
2.4. Box-Wing Model
Based on the analytical physical theory, the SRP acceleration generated by a surface of area A depends on the relative alignment of the Sun direction and the surface normal
as well as the fraction of absorbed photons (
α), of diffusely reflected photons (
δ), and of specularly reflected photons (
ρ) [
15,
16]. For
, that is, for an illuminated surface, the acceleration
a at a distance of 1 AU can be accounted as
where
W/m
2 is the solar flux at 1AU,
c is the vacuum velocity of light, and
M is the total mass of the satellite. This equation can be used for SRP calculation on SPs. For a satellite bus panel, which is covered by multilayer insulation for thermal protection, the thermal re-radiation must be accounted for. Hence, the modified formulation for the acceleration [
17] on the satellite bus surfaces is
By simply treating the satellite as a combination of box as two wings, the SRP acceleration acting on the satellite can be easily calculated by summing the SRP accelerations of each illustrated satellite bus panels and SPs.
As the changes in the a priori geometrical or optical properties of the satellite, or attitude deviations from the nominal, result in deficiencies of the above analytical model in modeling actual SRP perturbation, the adjustable box-wing model (ABW) has been proposed [
17]. By fitting the optical coefficients and other parameters with real-tracking measurements, this model provides precise orbit solution with a clear physical understanding of SRP. For the satellites with nominal YS attitude, up to nine parameters are adjusted, including the absorption plus diffusion (
α +
δ) as well as reflection (
ρ) for the illustrated surfaces (+X, +Z, and −Z), scale parameter of SPs (
), SP rotation lag (denoted as SB hereafter), and Y bias. From Equation (6), the partial derivatives of the acceleration w.r.t the optical properties of the satellite surfaces can be obtained as
For the nominal YS attitude, the SPs are perpendicular to the Sun direction with
and
, the partial derivatives of the acceleration w.r.t scale parameter of SPs and SB are expressed as:
The correlation between parameters of ABW model is strong, so reasonable results are achieved only with a priori constraints being put on most of those parameters. To avoid the disadvantages of the ABW model, the box-wing model was reformulated [
6]. The deduced model employs a specific parameterization that isolates distinct contributions of the satellite bus, in which the SRP accelerations depends only on the
ε angle. Without considering the SRP acting on SPs, the model can be expressed in
D and
B directions in the DYB frame as
where
,
and
indicate the effect of a cubic (
C), stretched (
S), and asymmetric (
A) contributions of satellite body shape related to absorption plus diffuse reflection (superscript 𝛼𝛿), while model parameters
,
and
are related to the specular reflection (𝜌) part for the corresponding body shape contributions, and the above parameters can be obtained by,
where
and
(
) are related to absorption plus diffuse reflection and reflection of the individual satellite body surface. These parameters are calculated from the a priori geometrical information list in
Table 1. The Sun elongation angle
ε in Equation (10) can be expressed as
3. Performance of SRP Models for BeiDou-3 I2-S Satellite
The POD strategy used has already been presented in [
3]. The differences to be addressed here included the data period and tracking stations used. In general, the data collected by 25 stations from 11 November 2016 to 15 September 2017 have been processed. The increase in the number of available tracking stations is mainly contributed to the upgrades of the receivers from International GNSS Monitoring and Assessment system (iGMAS) network. Three solutions, named ECOM1, ECOM2, and ABW were determined according to the SRP models used. The SLR and orbit boundary discontinuities (OBD) have been used for evaluating the orbit quality. SLR residuals exceeding an absolute value of 60 cm were excluded. As 72 h POD arc used, the OBD are obtained as the three-dimensional (3D) orbit difference at midnight epoch between two 3-day arc shifted by 72 h. In addition, the OBDs were treated as outliers and removed once the 3D values of the orbit differences were larger than 200 cm.
Figure 1 shows the one-way SLR residuals in the function of the
ε angle for the three solutions. In expectation, similar as that shown in [
3], the SLR residuals of ECOM1 solution show pronounced
ε-angle-dependent variation with bias up to −16.9 cm. Once the ECOM2 has been used, the bias has been reduced to −8.9 cm with slightly degraded standard derivations from 16.9 to 19.0 cm. However, most importantly, the
ε-angle-dependent error has been reduced. It is worth noticing that the
ε angle is actually a function of both
β and
μ, as expressed in Equation (12). We therefore decomposed the SLR residuals into the two arguments respectively as shown in
Figure 2, and found that a marked v-shaped SLR variation with symmetry to the zero degree of
μ angle can be identified for the ECOM1 solution, while it did not exist in ECOM2 solution, while the dependence with to
β angle is not clear as the
μ angle. This might be attributed to smaller value of ratio of area-to-mass and less extended body shape used by BeiDou-3 I2-S satellite. For ABW solution, which shows the best SLR validation, the bias of SLR residuals was further reduced to −2.2 cm, and possibly generated by the unmodeled earth radiation pressure and antenna thrust. In addition, there are almost no significant
ε-angle-dependent variations in SLR residuals. This further demonstrates that ABW has the ability to capture the SRP perturbation quite well.
Figure 3 shows the daily OBD values in along-track, cross-track, and radial direction for these three solutions, and
Table 2 lists the mean values. It is worth noticing that some days were excluded as orbit maneuvers were detected, e.g., 25 August and 20 September 2017. In general, the three solutions show almost same performance, although ABW has slightly better performance in along-track and radial direction. The large OBDs in cross-track direction might be related to some onboard tests in March 2017. The radial OBDs show
β angle dependent variations, and became larger with an increase of
β angle. In addition, the slightly worse OBDs have been identified in eclipse periods, in particular for ECOM2 solution in radial direction and ABW solution in along-track direction. For ABW solution, it is possibly caused by deviations between the nominal yaw attitude and the real one, as we did not model the yaw maneuvers.
The above results demonstrated that better orbit consistency and accuracy could be achieved by use of ABW model. In addition, the
ε-angle-dependent error can also be reduced by using ABW model, hence, it is possible to establish a better SRP model for the BeiDou-3 I2-S satellite based on ABW model, as we did for QZSS Michibiki mission [
11].
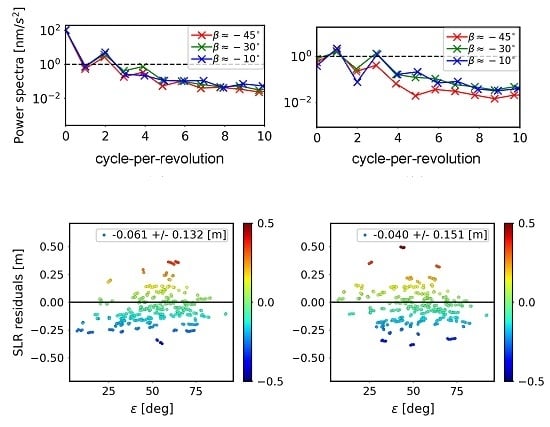
5. Validation
The same data set were used to validate the performance of the above proposed two a priori models. Two solutions were determined by using cuboid model or empirical FFT model. The SLR and OBD are also used to validate the solutions’ quality.
Figure 6 illustrates the SLR residuals of these two solutions against the
ε angle. In general, once the proposed models used as the priori models of ECOM1, the remarkable improvements can be obtained. For all of the two solutions with the a priori model, the
ε-angle-dependent error was almost vanished, while the −17.0 cm bias was reduced to −6.1 cm and −4.0 cm, respectively. Between the two solutions, almost same performance was obtained, though the SLR residuals of empirical FFT model became slightly scatter and has a little larger standard derivation.
Time series of daily OBDs for the two solutions are illustrated in
Figure 7, and
Table 5 lists the mean values in Along-track, Cross-track, and radial directions. For both solutions, almost identical OBDs are achieved, and show similar performance as that of ECOM1 solution. The radial OBDs show
β angle dependent variations, and the worse OBDs have been identified in eclipse periods. For Galileo satellites with a priori model for ECOM1 [
6], the OBDs also have similar performance as that of solution determined with ECOM1 only.
6. Conclusions
Similar to Galileo satellites, deficiency in ECOM1 orbit solution for BeiDou-3 I2-S satellites was identified, in which a marked ε-angle-dependent radial error exists. The standalone ECOM1 fail to properly describe the acceleration acting on an extended body shape with a large area-to-mass ratio. Through the comparisons of the widely used SRP models i.e., ECOM1, ECOM2, and ABW, we found that all of them showed similar orbit accuracy of approximately 50 cm revealed by OBDs, but SLR validation results of ECOM1 confirmed larger ε-angle-dependent error, as well as a bias of nearly −17 cm. Although the ε-angle-dependent errors in SLR residuals can be reduced by ECOM2, there was still a large bias. Fortunately, the ABW model can be used to overcome the issues.
We established an analytical a priori cuboid model from coarse information of BeiDou-3 I2-S satellite. In addition, the empirical FFT model was obtained with accuracy of around 1 nm/s2. By augmenting the ECOM1 with the a priori models, radial orbit accuracy was improved by approximately 35% w.r.t the ECOM1 solution. More importantly, the ε-angle-dependent error of SLR residuals was almost eliminated.
Though the success of the applications of those priori models, further efforts should be performed for the orbit dynamics in eclipse seasons. Yaw attitude is another point to be carefully considered to model SRP. In addition, relevant modeling of SRP by ray-tracking method [
18] is in need for the detailed structure and the additional effects of shadowing and secondary intersections.










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}