Using Bidirectional Long Short-Term Memory Method for the Height of F2 Peak Forecasting from Ionosonde Measurements in the Australian Region



Abstract
:
1. Introduction
2. Data Sources
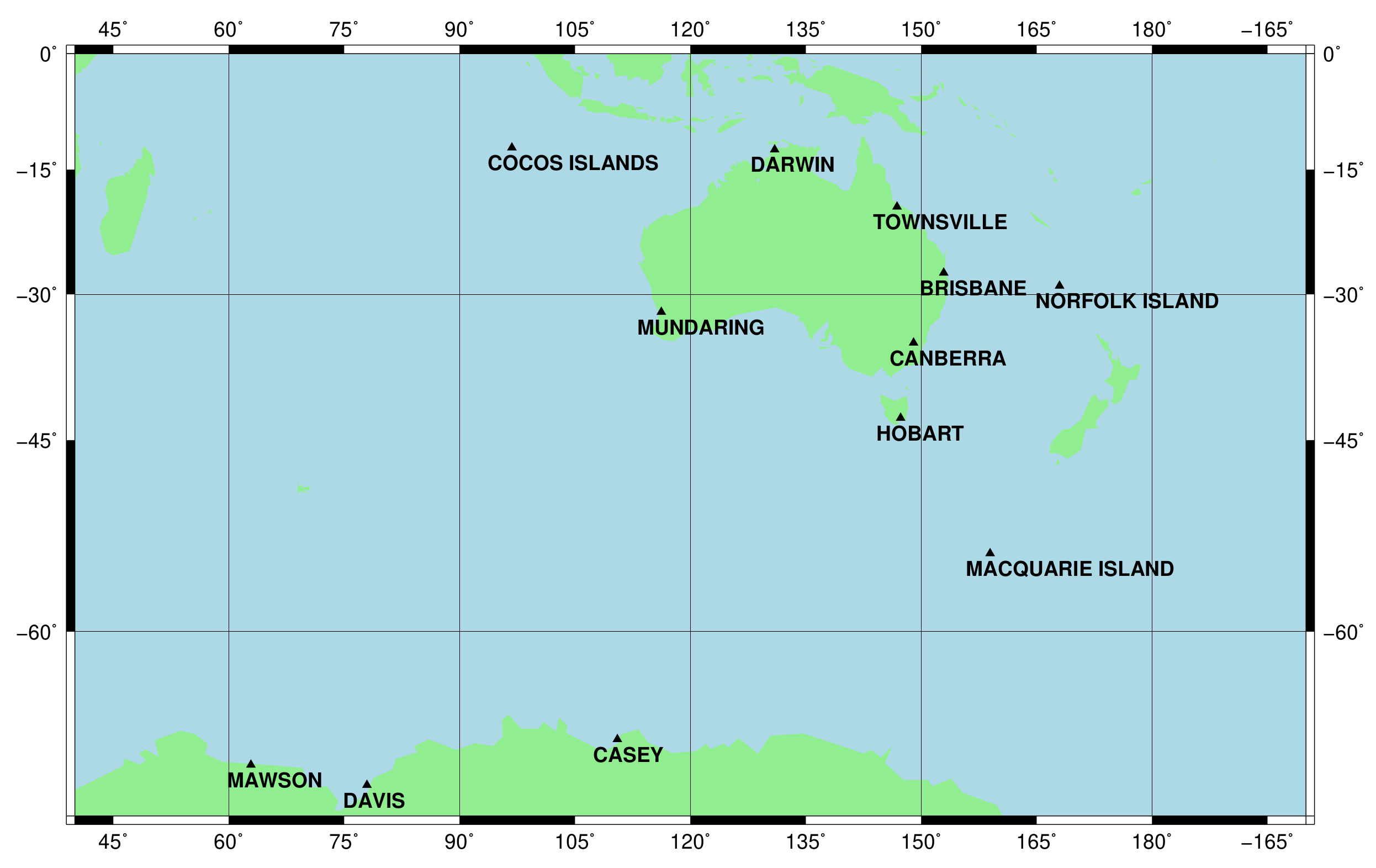
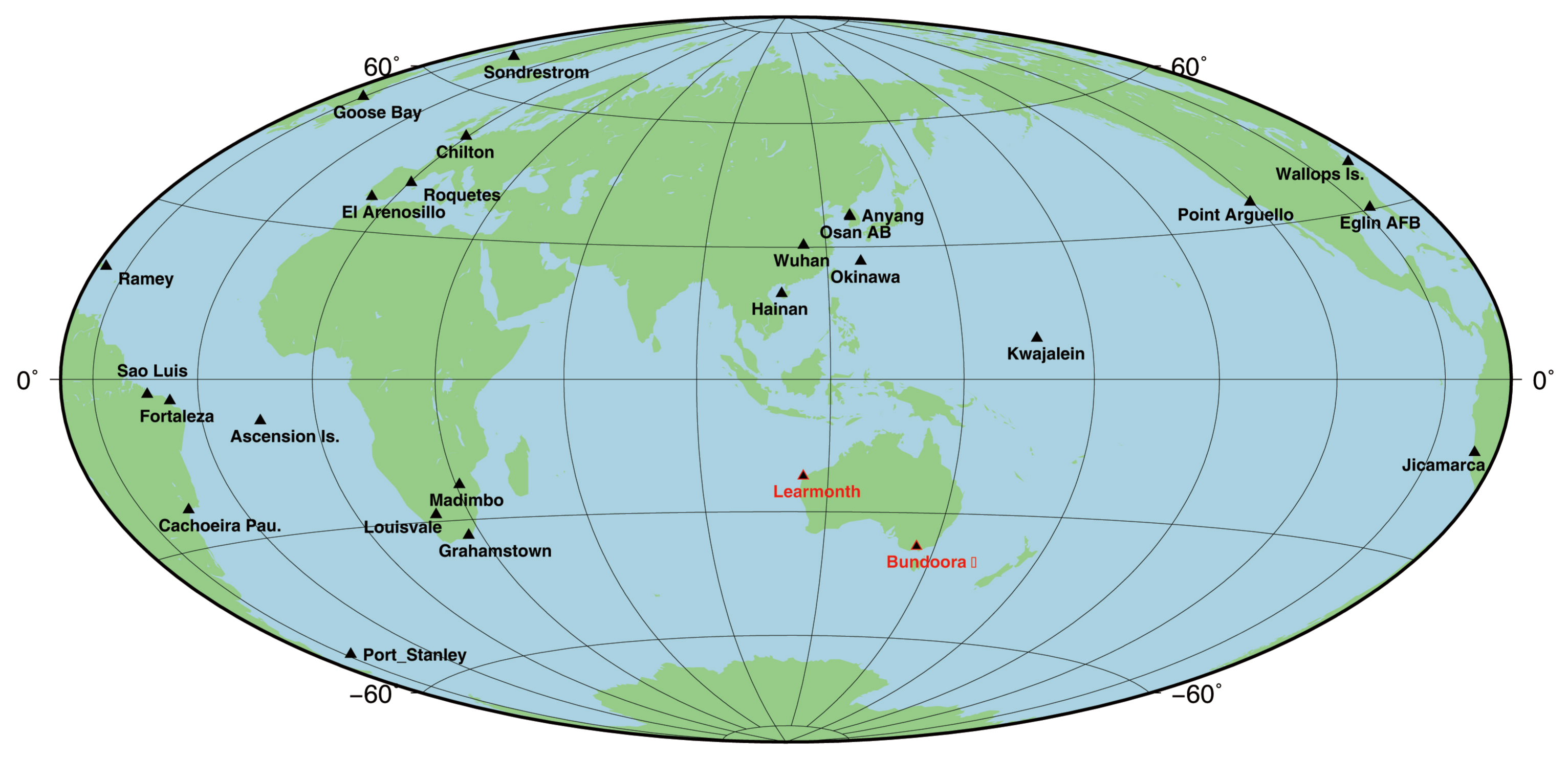
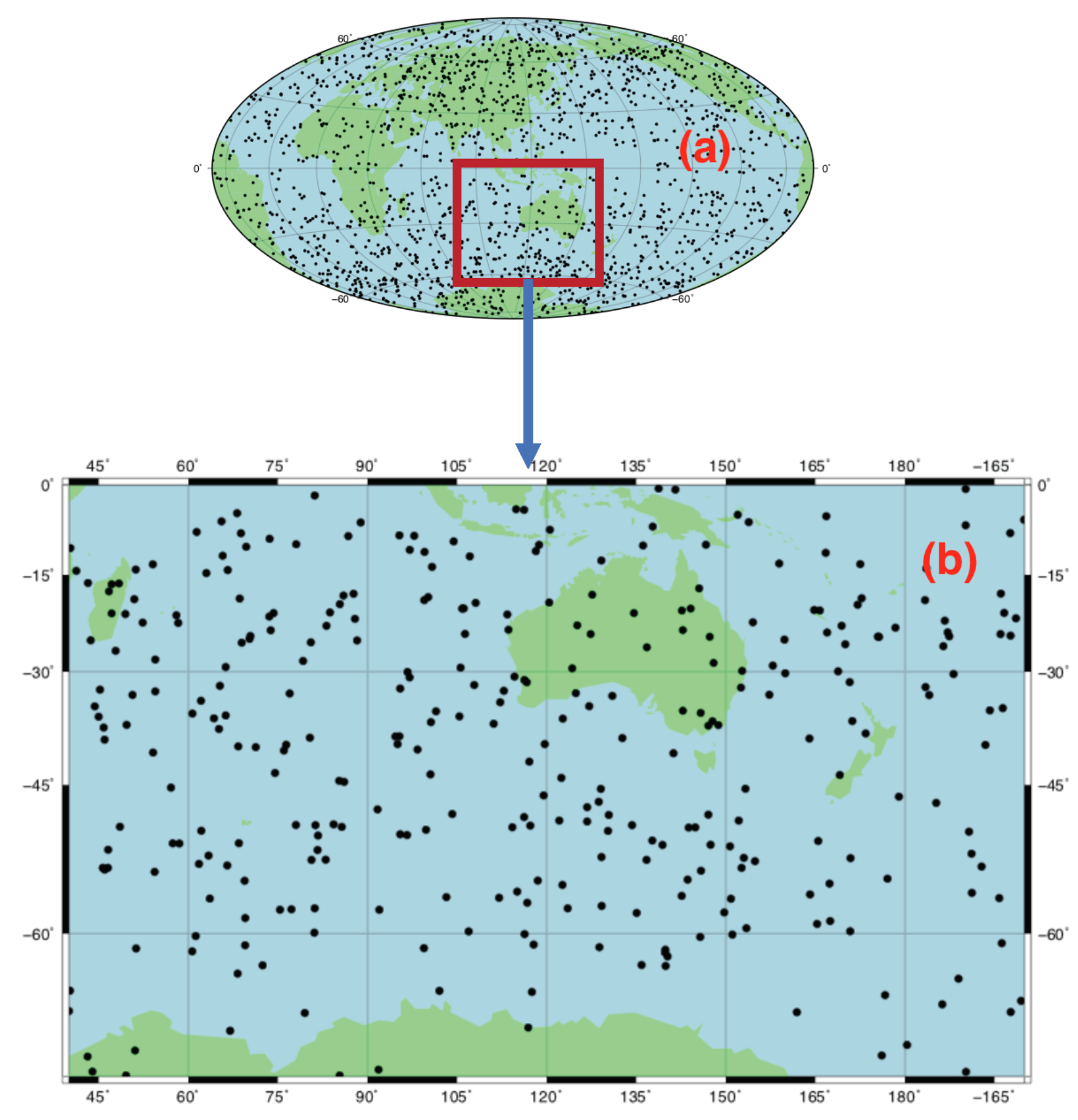
2.1. Ionosonde Stations
2.2. Variables
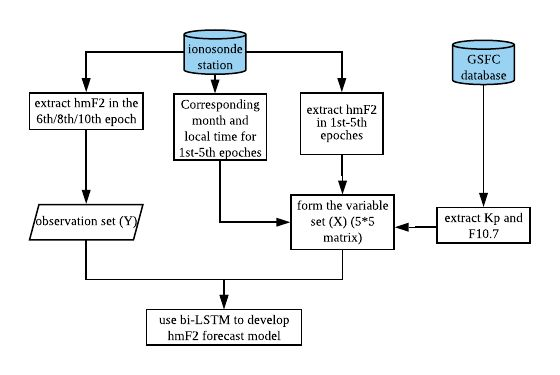
3. Methodology
3.1. hmF2 Generation
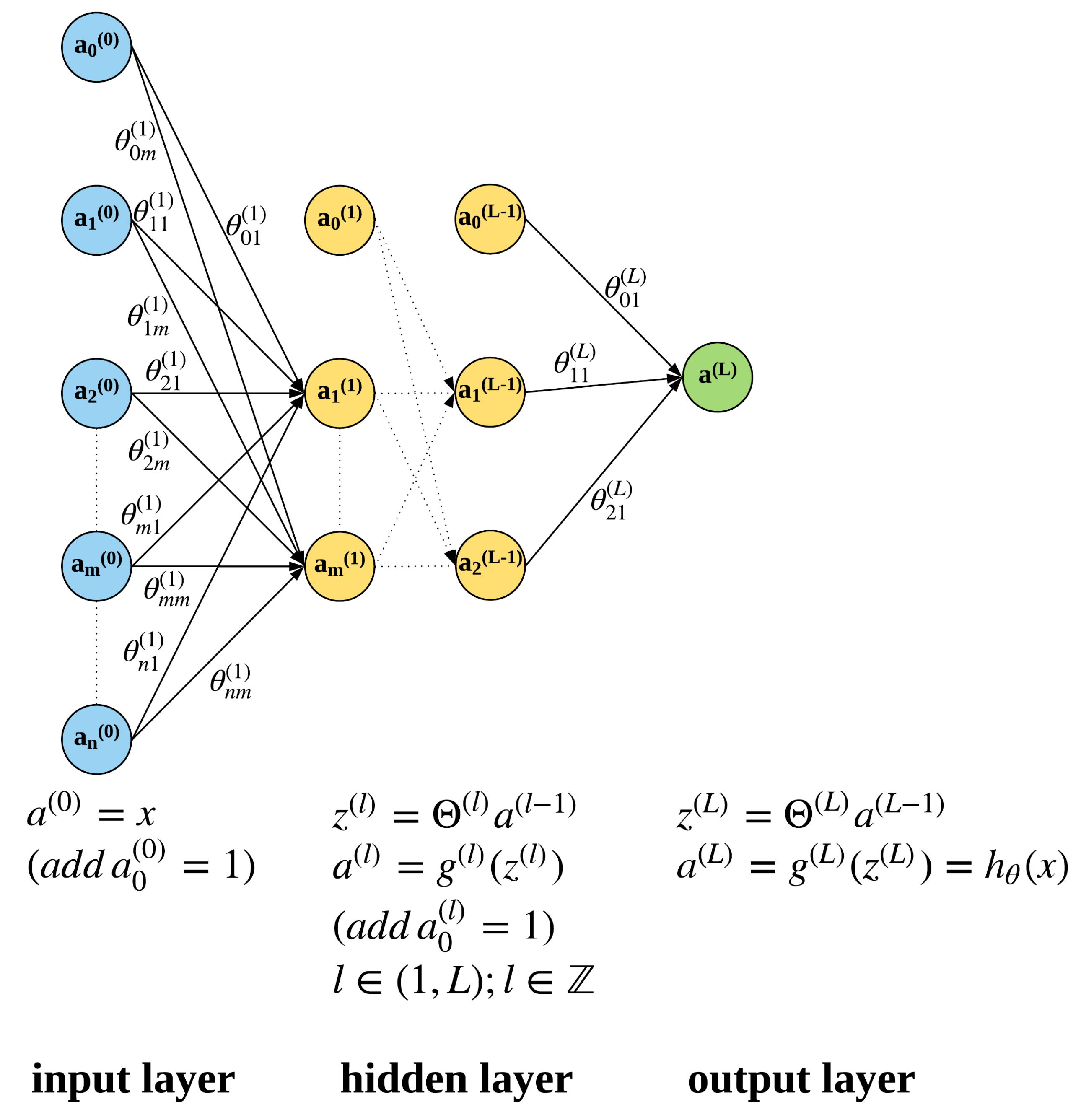
3.2. Artificial Neural Network (ANN)
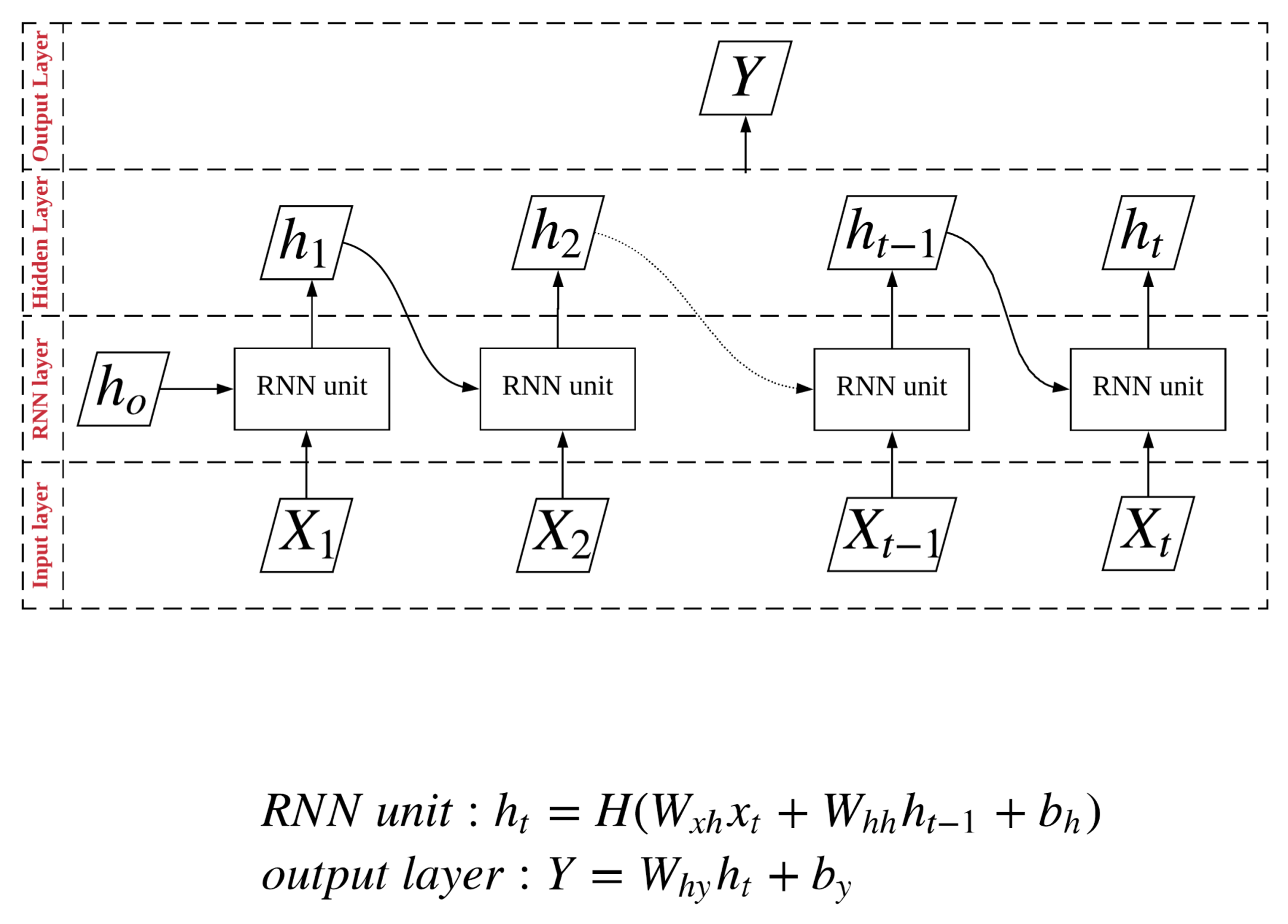
3.3. Recurrent Neural Network (RNN)
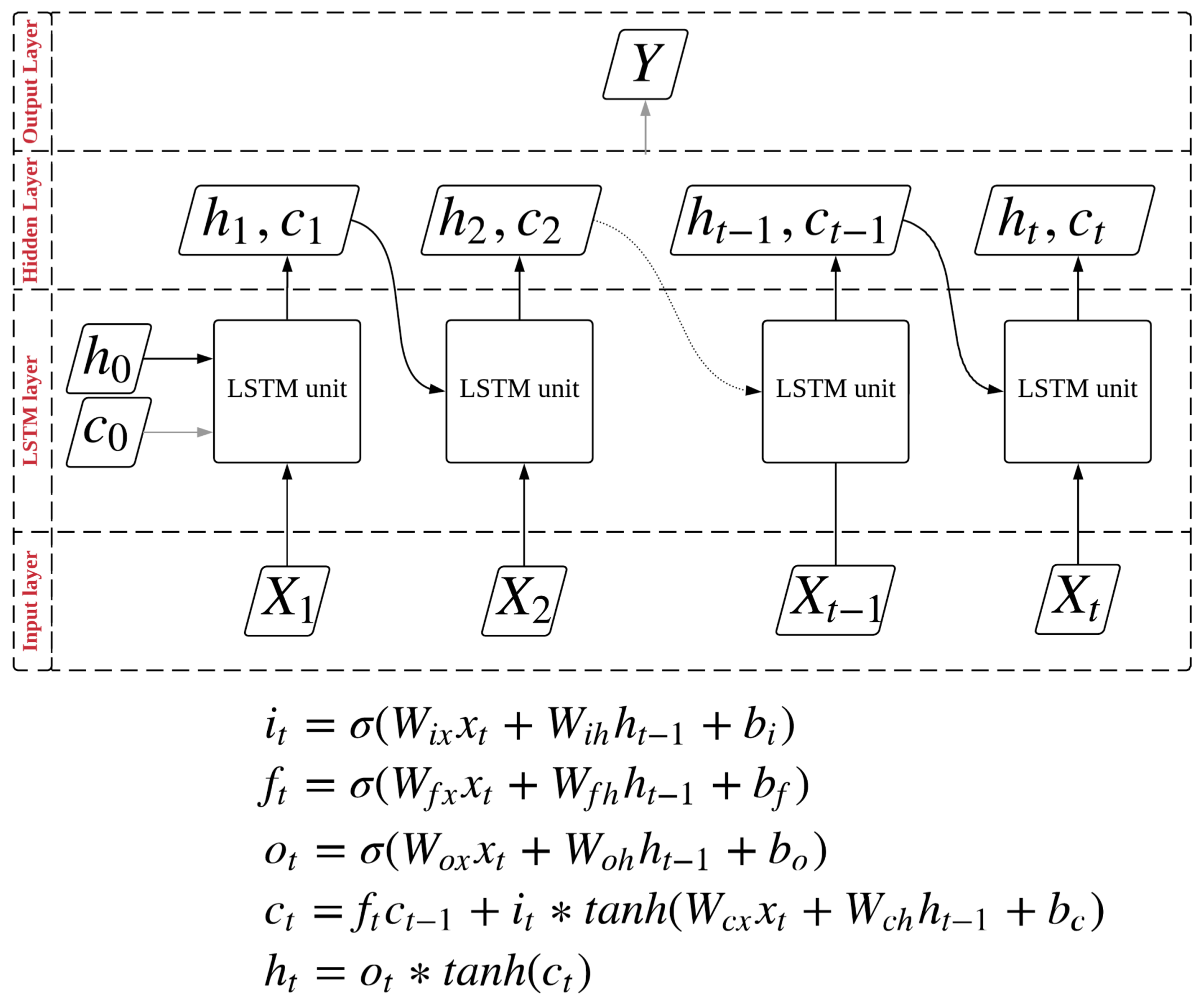
3.3.1. Long Short-Term Memory (LSTM) Method
3.3.2. Bidirectional LSTM (bi-LSTM) Method
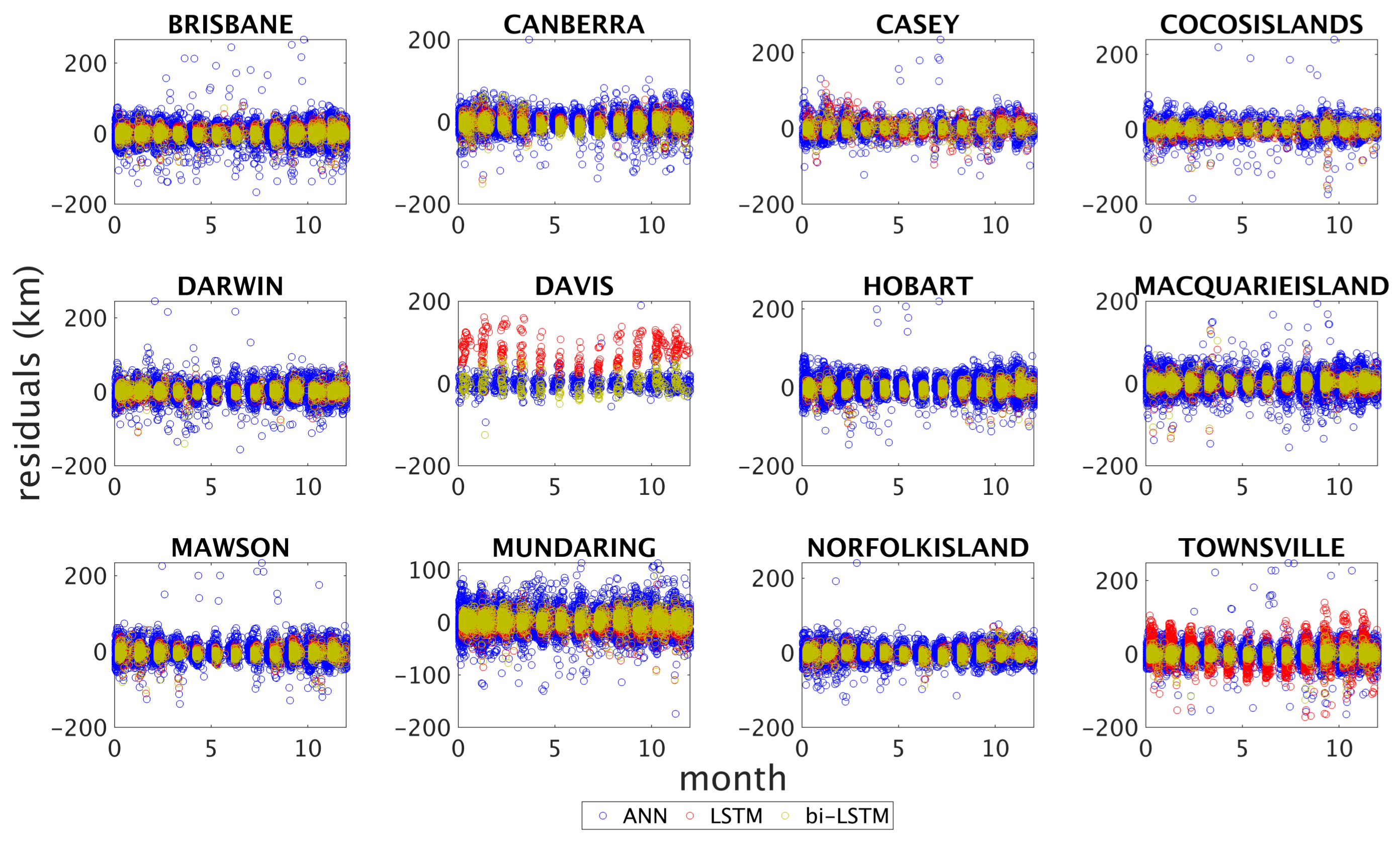
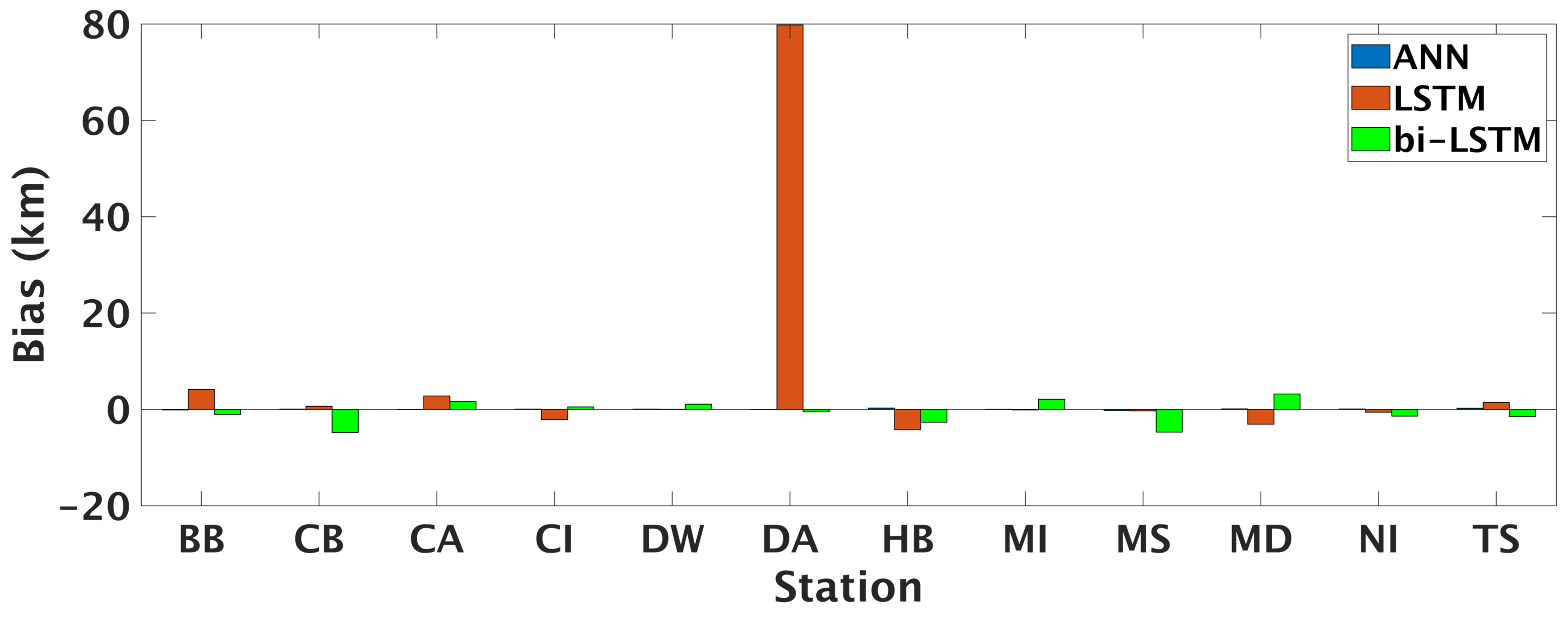
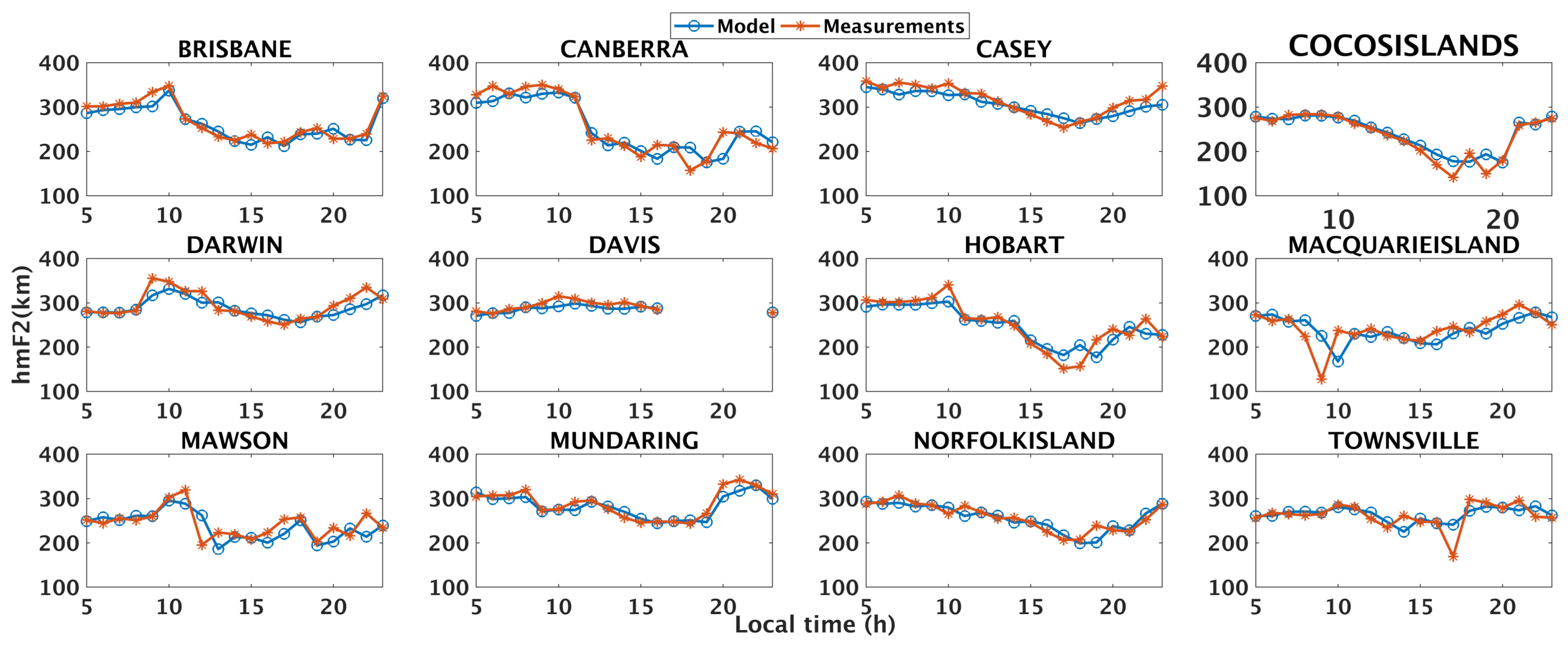
4. Results
5. Summary and Conclusions
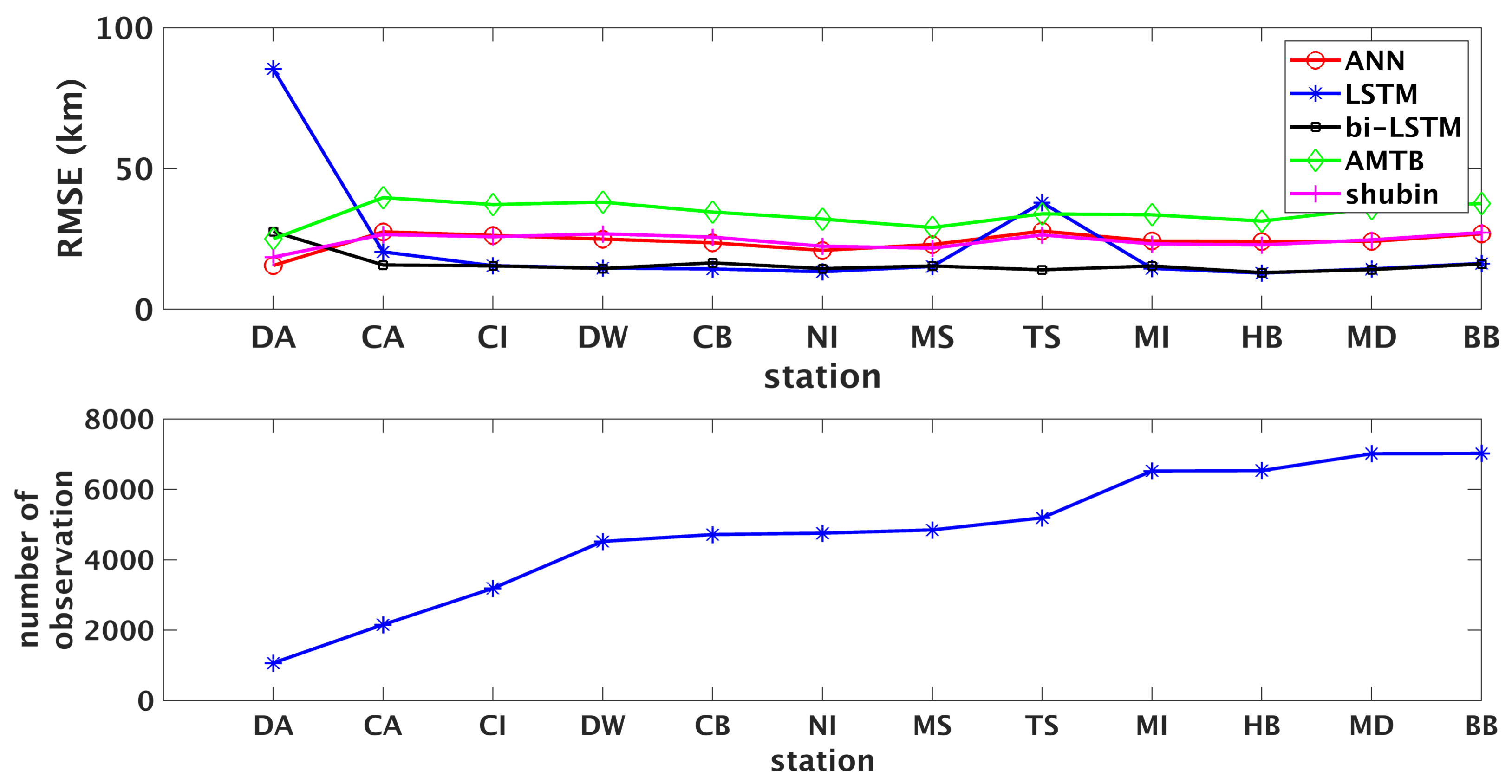
- The new bi-LSTM and LSTM models substantially outperform the other three tested models, even when real-time data are used as part of the input for these three models.
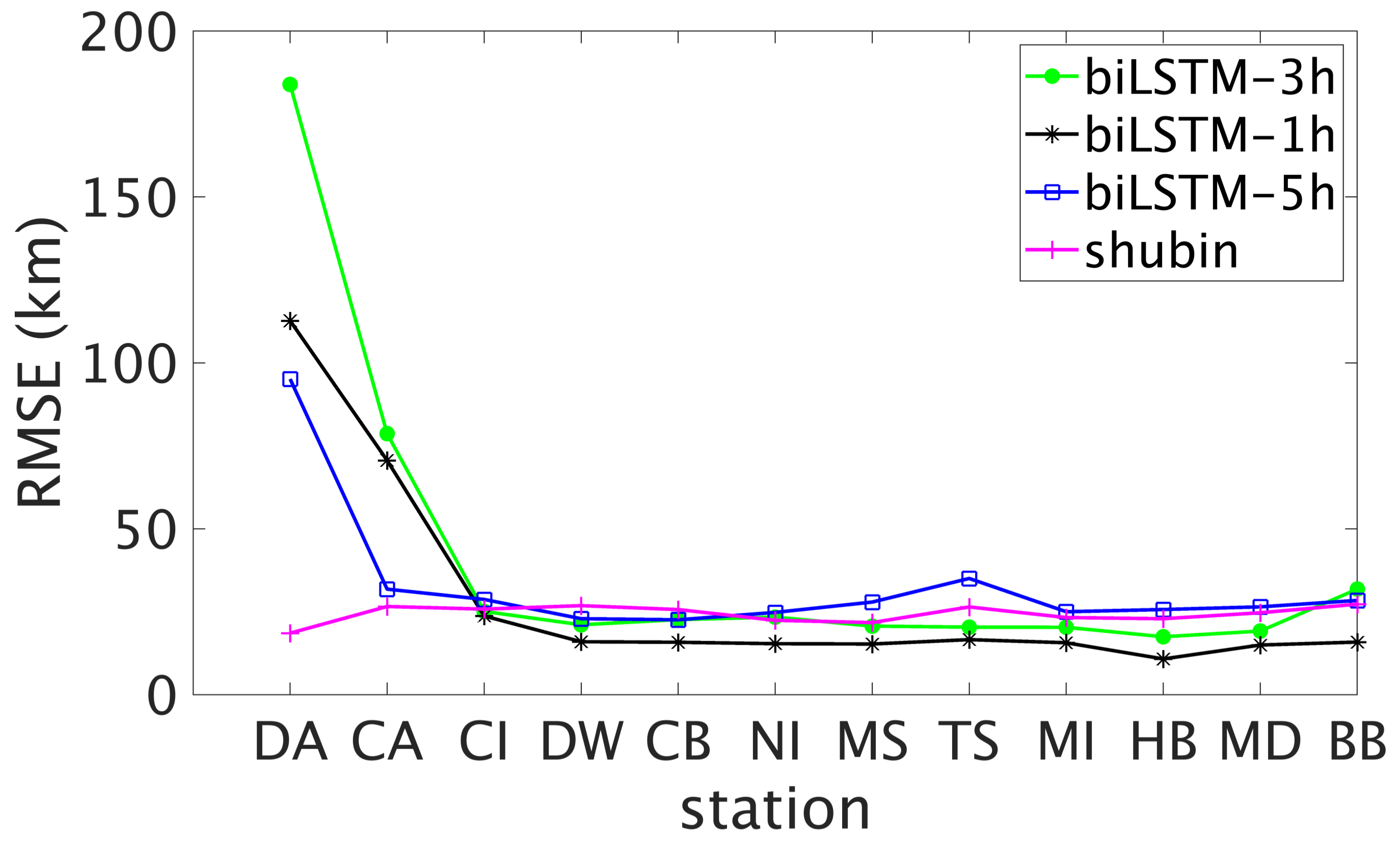
- The new model is more robust, and more easily and rapidly converge compared to the LSTM model. The overall performance improvement of the new bi-LSTM model is 30% compared to the ANN regional model.
- The minimum sample numbers for the LSTM and bi-LSTM methods to converge are around 3000 and 2000 respectively.
- The performance of the Shubin model is better than that of AMTB model in the Australian region.
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Abbreviations
| ANN | artificial neural network |
| RNN | recurrent neural network |
| LSTM | long short-term memory |
| bi-LSTM | bi-directional long short-term memory |
References
- Ngwira, C.M.; McKinnell, L.A.; Cilliers, P.J.; Coster, A.J. Ionospheric observations during the geomagnetic storm events on 24–27 July 2004: Long-duration positive storm effects. J. Geophys. Res. Space Phys. 2012, 117. [Google Scholar] [CrossRef]
- Goncharenko, L.; Salah, J.; Van Eyken, A.; Howells, V.; Thayer, J.; Taran, V.; Shpynev, B.; Zhou, Q.; Chau, J. Observations of the April 2002 geomagnetic storm by the global network of incoherent scatter radars. Ann. Geophys. 2005, 23, 163–181. [Google Scholar] [CrossRef] [Green Version]
- Davies, K. Ionospheric Radio; Number 31; IET: Stevanage, UK, 1990. [Google Scholar]
- Bilitza, D.; Hoegy, W. Solar activity variation of ionospheric plasma temperatures. Adv. Space Res. 1990, 10, 81–90. [Google Scholar] [CrossRef]
- Bilitza, D.; Huang, X.; Reinisch, B.W.; Benson, R.F.; Hills, H.K.; Schar, W.B. Topside ionogram scaler with true height algorithm (TOPIST): Automated processing of ISIS topside ionograms. Radio Sci. 2004, 39. [Google Scholar] [CrossRef]
- Bilitza, D.; Reinisch, B.W. International reference ionosphere 2007: Improvements and new parameters. Adv. Space Res. 2008, 42, 599–609. [Google Scholar] [CrossRef]
- Magdaleno, S.; Altadill, D.; Herraiz, M.; Blanch, E.; de La Morena, B. Ionospheric peak height behavior for low, middle and high latitudes: A potential empirical model for quiet conditions—Comparison with the IRI-2007 model. J. Atmos. Sol. Terr. Phys. 2011, 73, 1810–1817. [Google Scholar] [CrossRef]
- Altadill, D.; Magdaleno, S.; Torta, J.; Blanch, E. Global empirical models of the density peak height and of the equivalent scale height for quiet conditions. Adv. Space Res. 2013, 52, 1756–1769. [Google Scholar] [CrossRef]
- Bilitza, D.; Altadill, D.; Zhang, Y.; Mertens, C.; Truhlik, V.; Richards, P.; McKinnell, L.A.; Reinisch, B. The international reference ionosphere 2012—A model of international collaboration. J. Space Weather Space Clim. 2014, 4, A07. [Google Scholar] [CrossRef]
- Bilitza, D.; Altadill, D.; Truhlik, V.; Shubin, V.; Galkin, I.; Reinisch, B.; Huang, X. International reference ionosphere 2016: From ionospheric climate to real-time weather predictions. Space Weather 2017, 15, 418–429. [Google Scholar] [CrossRef]
- Hoque, M.; Jakowski, N. A new global model for the ionospheric F2 peak height for radio wave propagation. Ann. Geophys. Copernicus GmbH 2012, 30, 797. [Google Scholar] [CrossRef] [Green Version]
- Shubin, V.; Karpachev, A.; Tsybulya, K. Global model of the F2 layer peak height for low solar activity based on GPS radio-occultation data. J. Atmos. Sol. Terr. Phys. 2013, 104, 106–115. [Google Scholar] [CrossRef]
- Sai Gowtam, V.; Tulasi Ram, S. An artificial neural network-based ionospheric model to predict NmF2 and hmF2 using long-term data set of FORMOSAT-3/COSMIC radio occultation observations: Preliminary results. J. Geophys. Res. Space Phys. 2017, 122, 743–755. [Google Scholar] [CrossRef]
- Tulasi Ram, S.; Sai Gowtam, V.; Mitra, A.; Reinisch, B. The improved two-dimensional artificial neural network-based ionospheric model (ANNIM). J. Geophys. Res. Space Phys. 2018, 123, 5807–5820. [Google Scholar] [CrossRef]
- Schuster, M.; Paliwal, K.K. Bidirectional recurrent neural networks. IEEE Trans. Signal Process. 1997, 45, 2673–2681. [Google Scholar] [CrossRef] [Green Version]
- Schalkoff, R.J. Artificial Neural Networks; McGraw-Hill: New York, NY, USA, 1997; Volume 1. [Google Scholar]
- Prolss, G.W.; Bird, M.K. Physics of the Earth’s Space Environment: An Introduction; Springer: Berlin, Germany, 2004. [Google Scholar]
- Bilitza, D.; Eyfrig, R.; Sheikh, N. A global model for the height of the F2-peak using M3000 values from the CCIR numerical map. ITU Telecommun. J. 1979, 46, 549–553. [Google Scholar]
- Hinton, G.; Srivastava, N.; Swersky, K. Neural networks for machine learning lecture 6a overview of mini-batch gradient descent. Neural Netw. Mach. Learn. 2012, 14, 14. [Google Scholar]
- Ruder, S. An overview of gradient descent optimization algorithms. arXiv, 2016; arXiv:1609.04747. [Google Scholar]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Station Name (Acronym) | Latitude | Longitude | Open | Closed |
|---|---|---|---|---|
| Cocos Islands (CI) | −12.20 | 96.80 | Nov 1961 | Sep 1974 |
| Aug 2008 | ||||
| Darwin (DW) | −12.45 | 130.95 | Dec 1982 | |
| Townsville (TS) | −19.63 | 146.85 | Jun 1946 | |
| Brisbane (BB) | −27.53 | 152.92 | Jun 1943 | Dec 1986 |
| Jun 1997 | ||||
| Norfolk Island (NI) | −29.03 | 167.97 | Feb 1964 | |
| Mundaring (MD) | −31.98 | 116.22 | Apr 1959 | Dec 2007 |
| Canberra (CB) | −35.32 | 149.00 | Mar 1937 | |
| Hobart (HB) | −42.92 | 147.32 | Dec 1945 | |
| Macquarie Islands (MI) | −54.50 | 158.95 | Jun 1950 | Nov 1958 |
| Nov 1983 | Jun 2015 | |||
| Casey (CA) | −66.30 | 110.50 | Jul 1957 | Jan 1975 |
| Apr 1989 | Mar 1992 | |||
| Nov 2000 | ||||
| Mawson (MS) | −67.60 | 62.88 | Feb 1958 | |
| Davis (DA) | −68.58 | 77.96 | Feb 1985 |
| RMS (km) | |
|---|---|
| ANN | 22.1 |
| LSTM | 15.64 |
| bi-LSTM | 15.42 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hu, A.; Zhang, K. Using Bidirectional Long Short-Term Memory Method for the Height of F2 Peak Forecasting from Ionosonde Measurements in the Australian Region. Remote Sens. 2018, 10, 1658. https://doi.org/10.3390/rs10101658
Hu A, Zhang K. Using Bidirectional Long Short-Term Memory Method for the Height of F2 Peak Forecasting from Ionosonde Measurements in the Australian Region. Remote Sensing. 2018; 10(10):1658. https://doi.org/10.3390/rs10101658
Chicago/Turabian StyleHu, Andong, and Kefei Zhang. 2018. "Using Bidirectional Long Short-Term Memory Method for the Height of F2 Peak Forecasting from Ionosonde Measurements in the Australian Region" Remote Sensing 10, no. 10: 1658. https://doi.org/10.3390/rs10101658
APA StyleHu, A., & Zhang, K. (2018). Using Bidirectional Long Short-Term Memory Method for the Height of F2 Peak Forecasting from Ionosonde Measurements in the Australian Region. Remote Sensing, 10(10), 1658. https://doi.org/10.3390/rs10101658