Sensitivity of TDS-1 GNSS-R Reflectivity to Soil Moisture: Global and Regional Differences and Impact of Different Spatial Scales

 ,
,  ,
,
Abstract
1. Introduction
2. Materials and Methods
2.1. TDS-1 Data Set
2.1.1. TDS-1 Observables at a Glance
2.1.2. Methodology: TDS-1 Data Pre-Processing
2.2. Regional L3 and L4 SMOS Soil Moisture Data
2.3. In Situ Data
2.4. Hydrological Models
2.4.1. LISFLOOD Model
2.4.2. MUSA Model
3. Results and Discussion
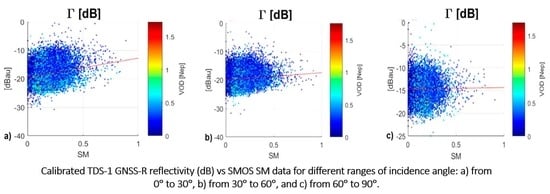
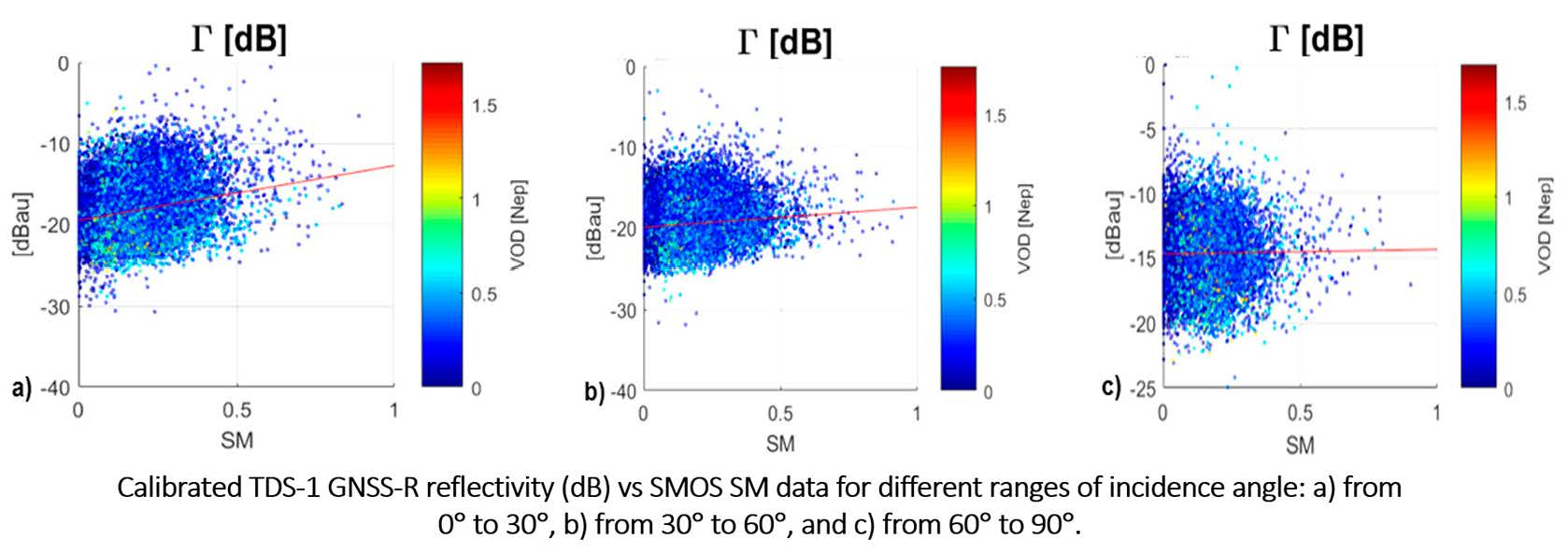
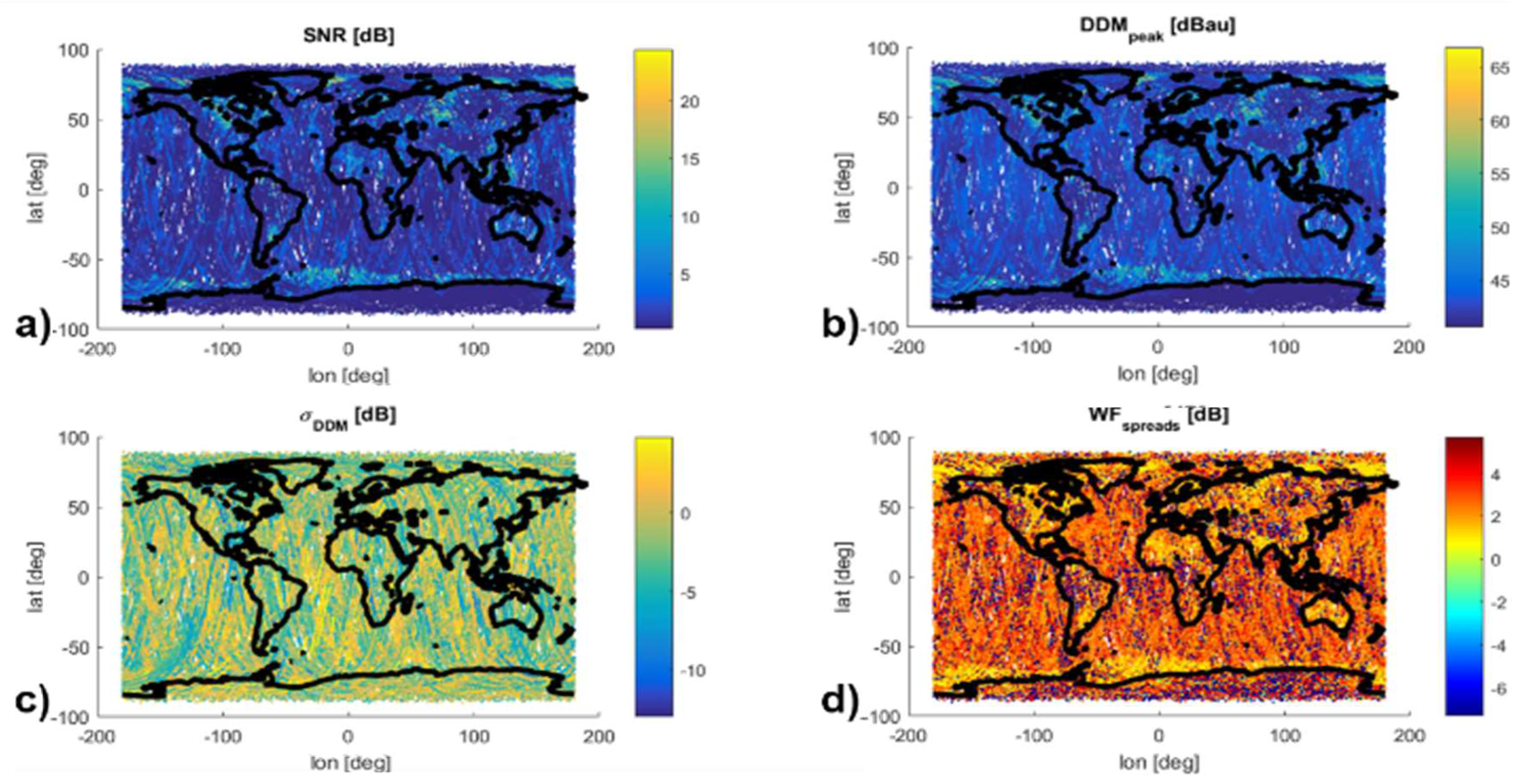
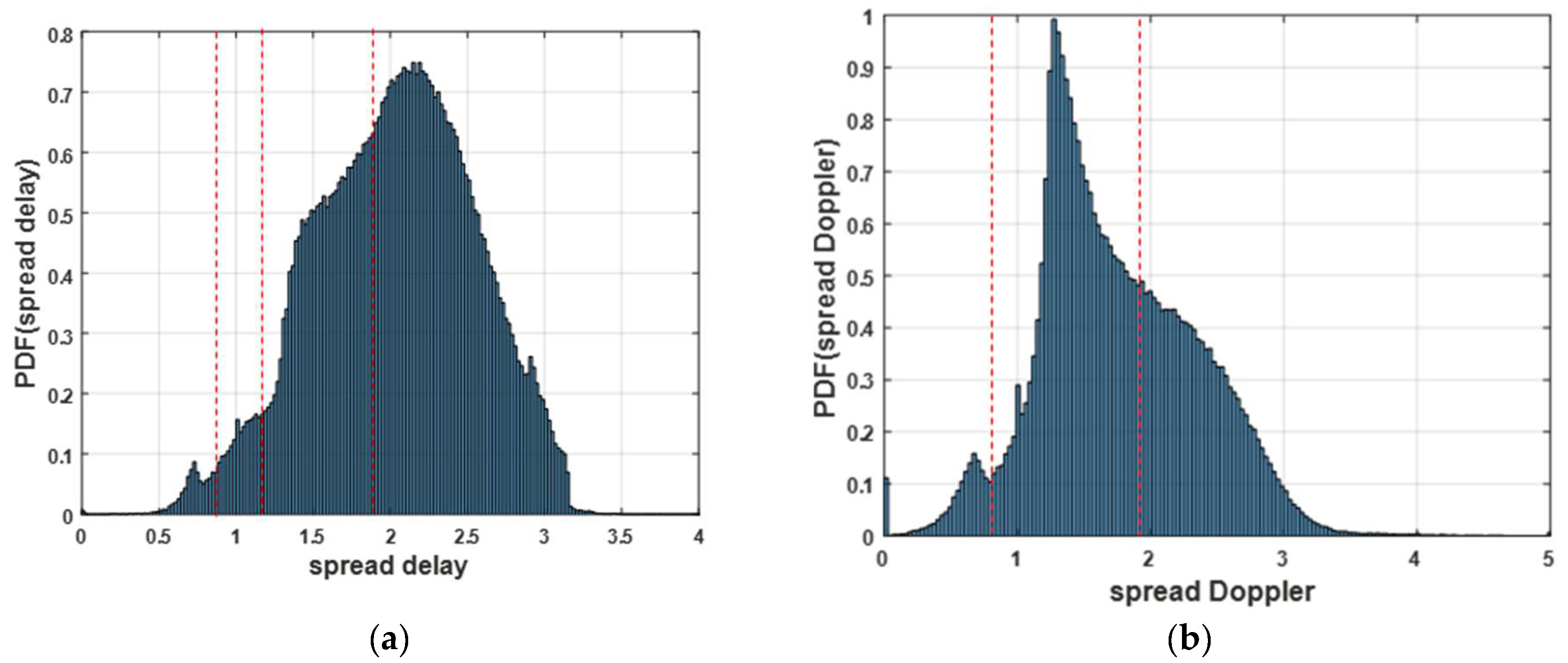
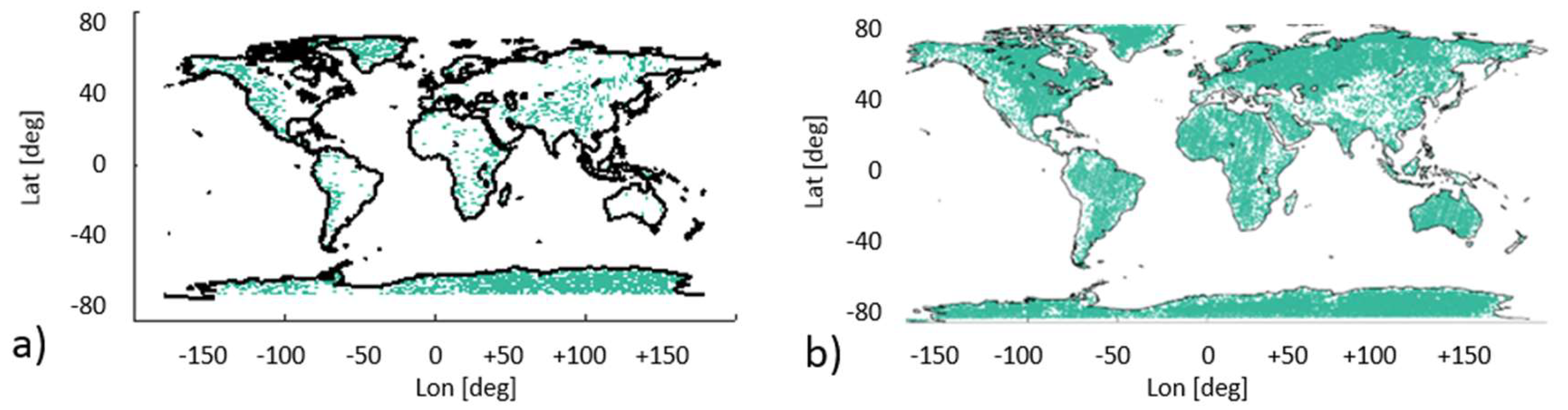
3.1. TDS-1 Data Analysis on a Global Scale
3.2. TDS-1 Data Analysis at Regional Scale
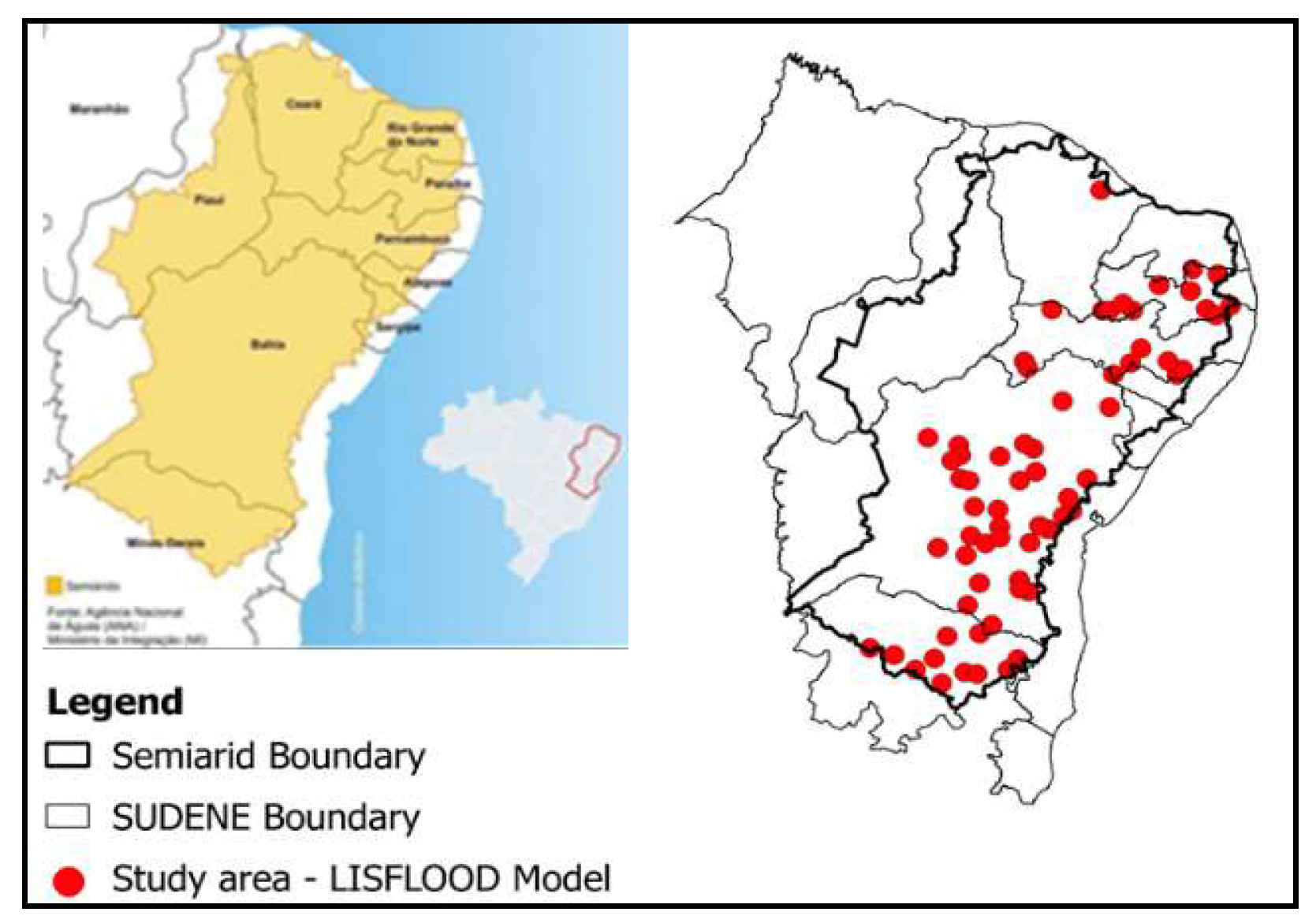
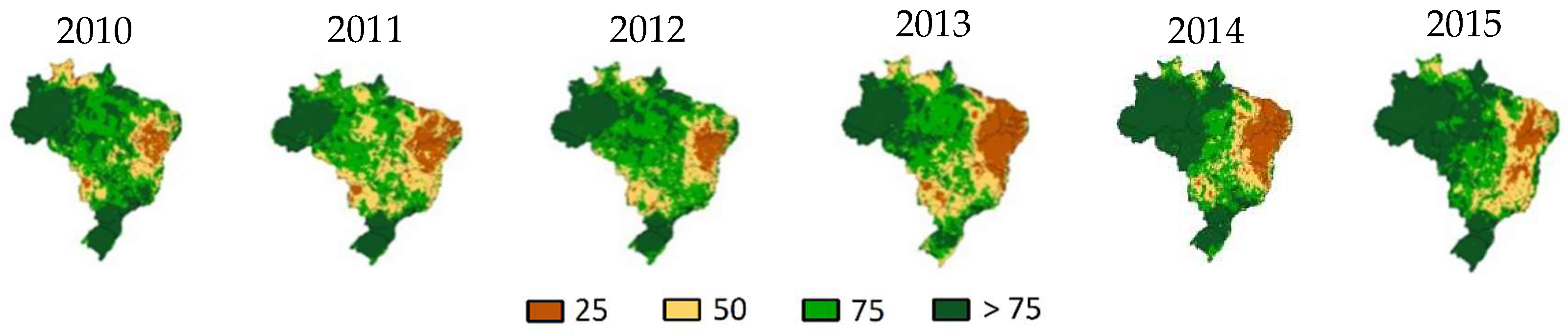
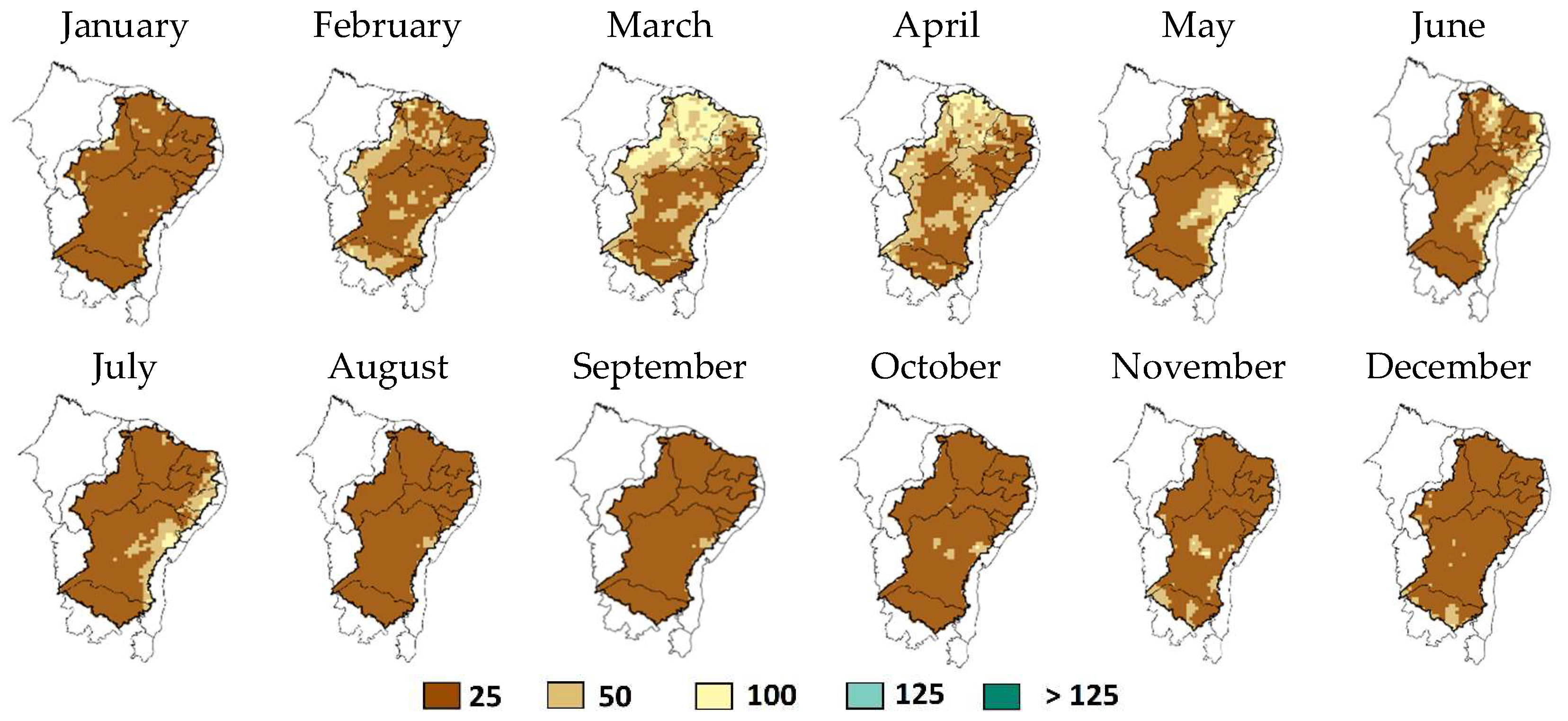
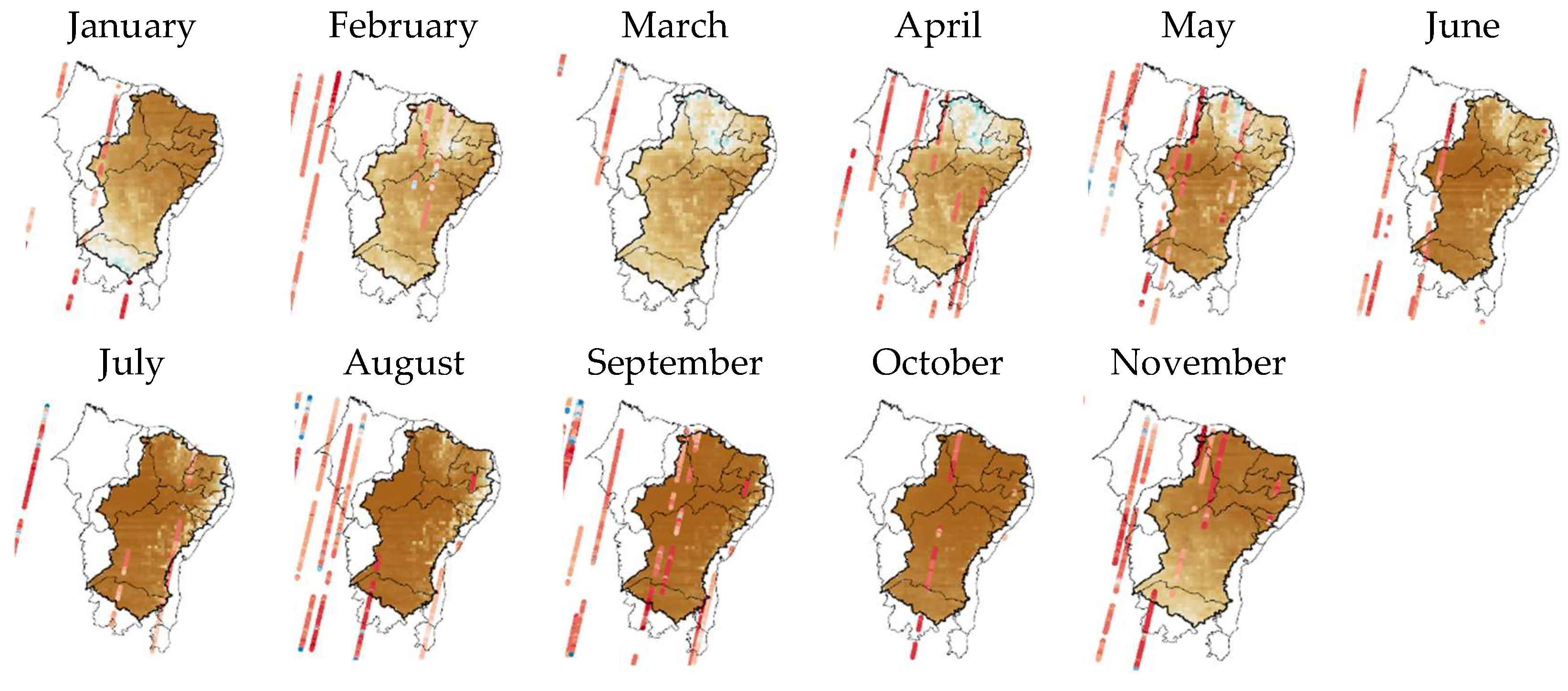
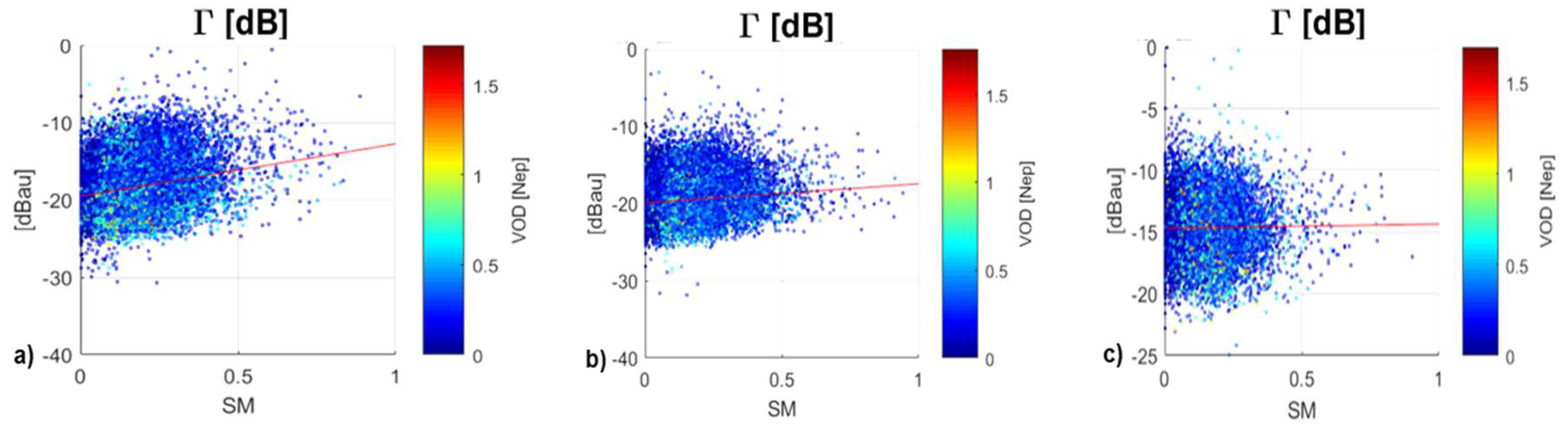
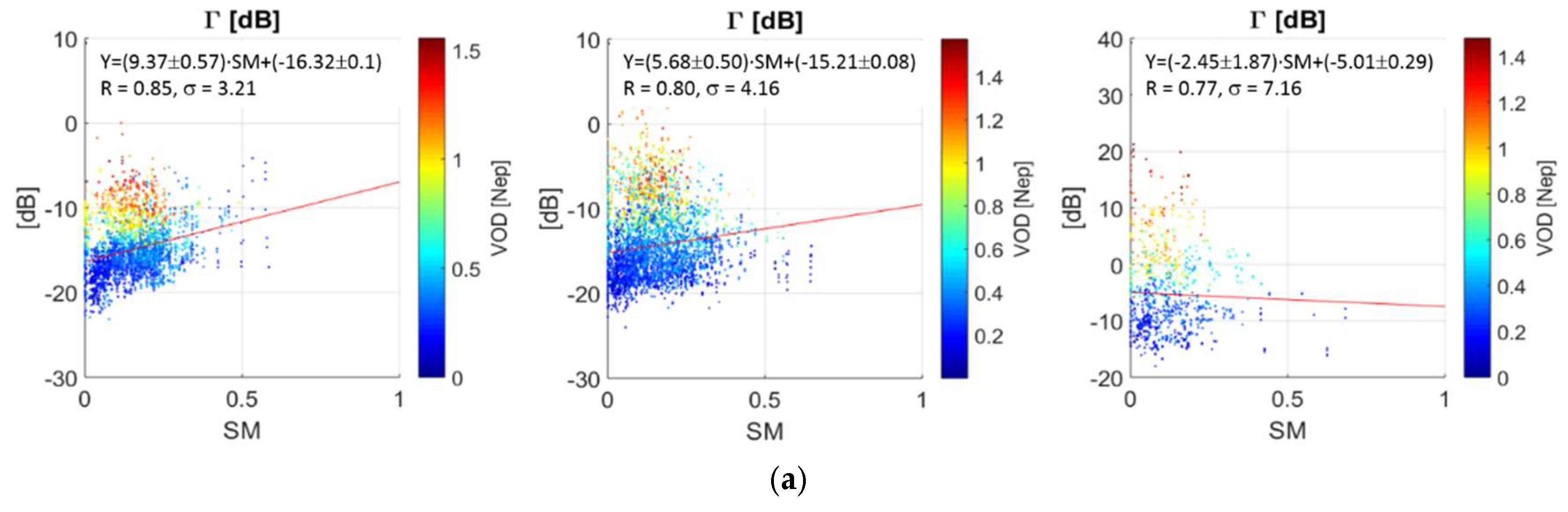
3.2.1. CEMADEM-Brazil
SMOS L3 SM Sensitivity
SMOS L4 SM Sensitivity
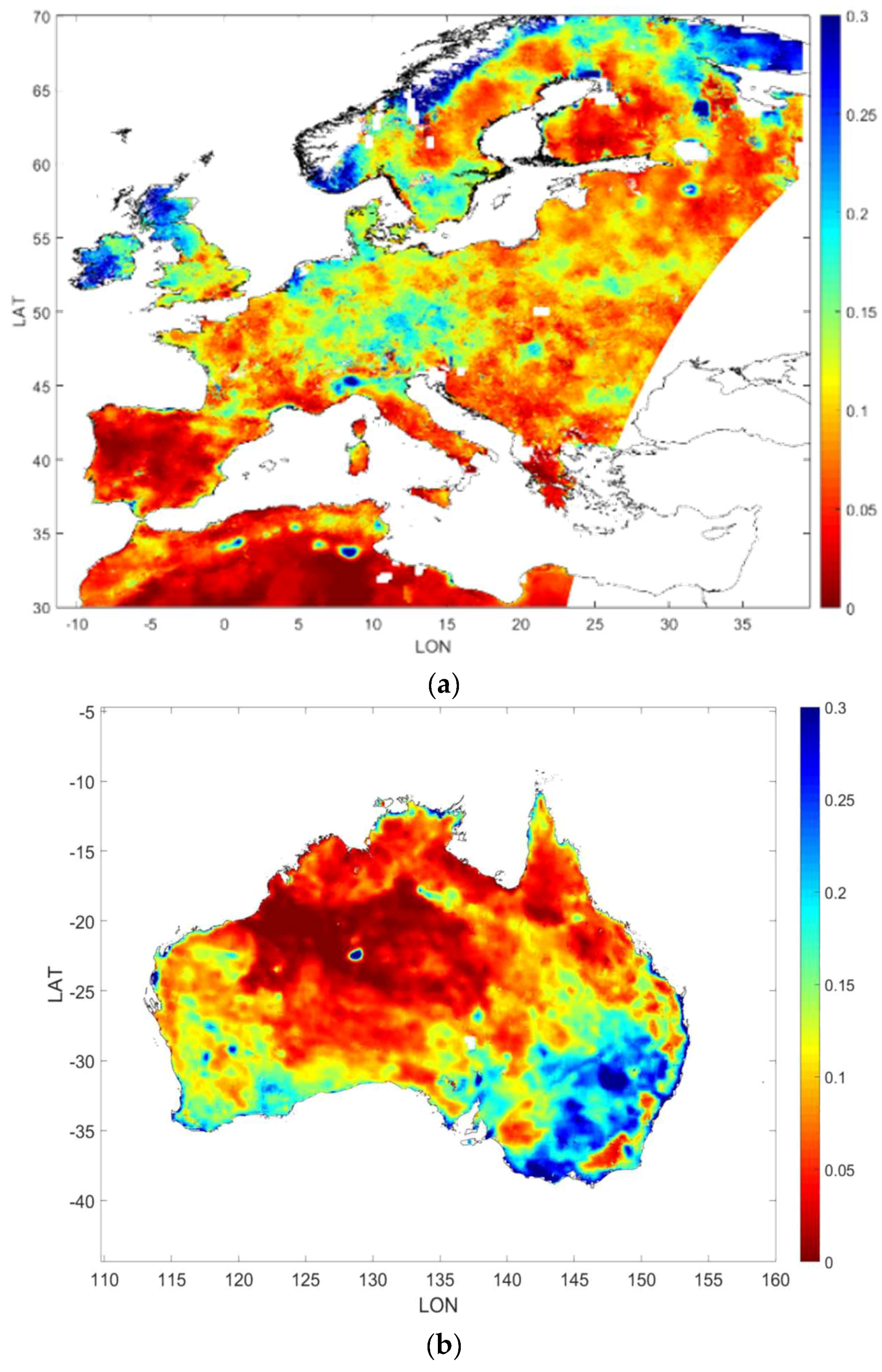
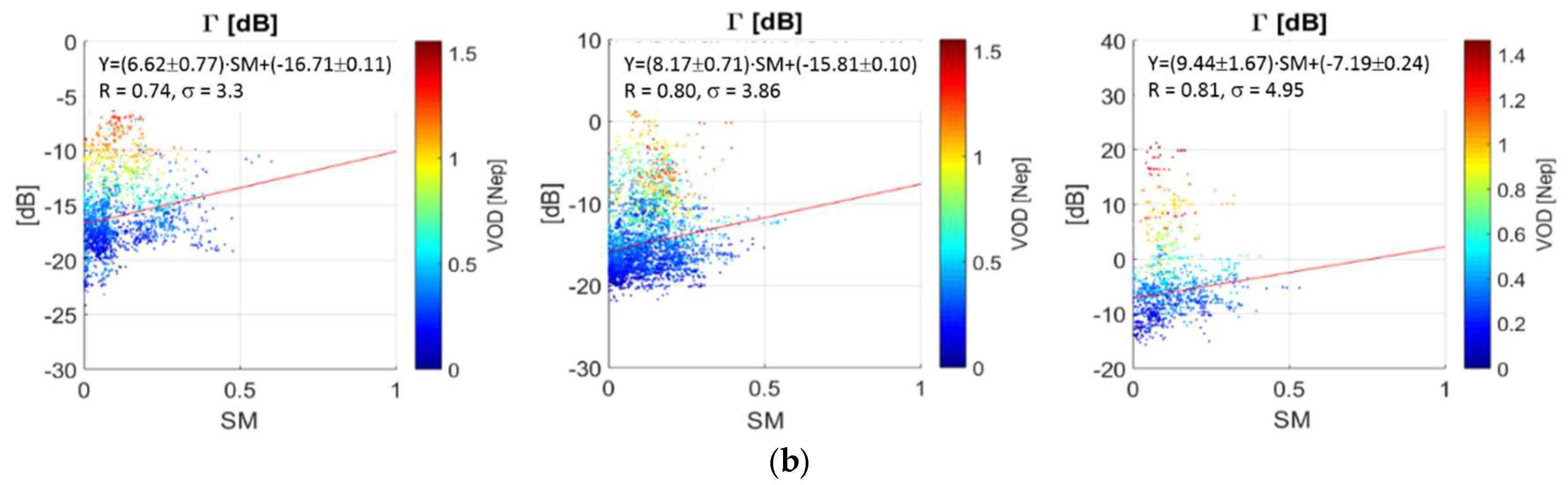
3.2.2. Iberian Peninsula
SMOS L3 SM Sensitivity
SMOS L4 SM Sensitivity
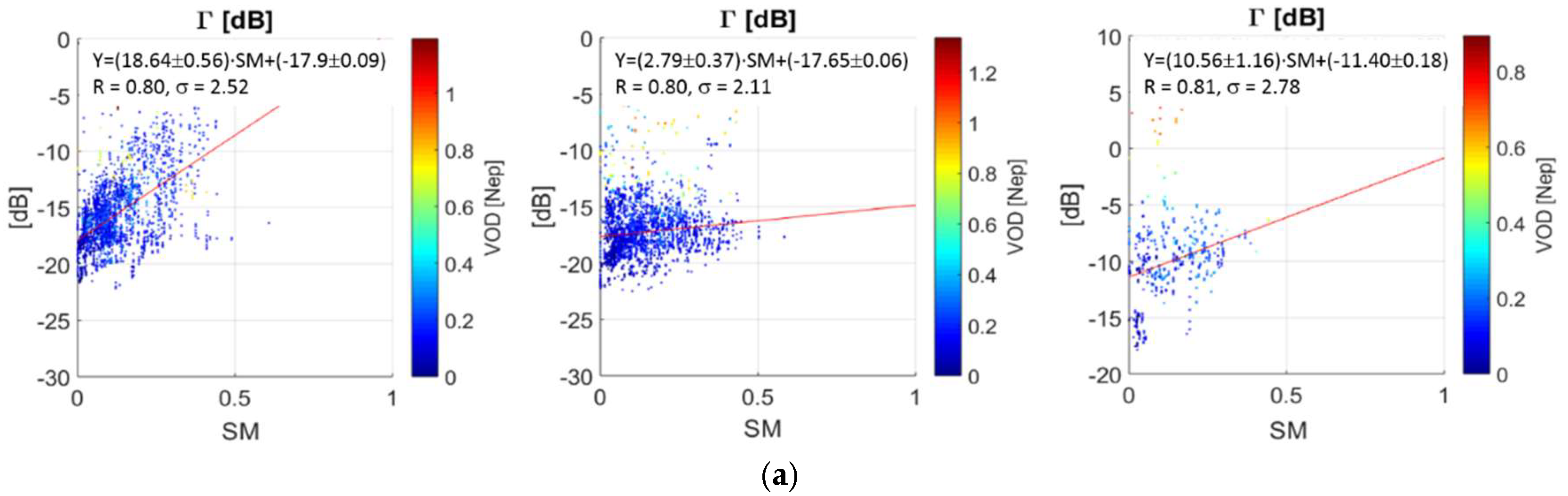
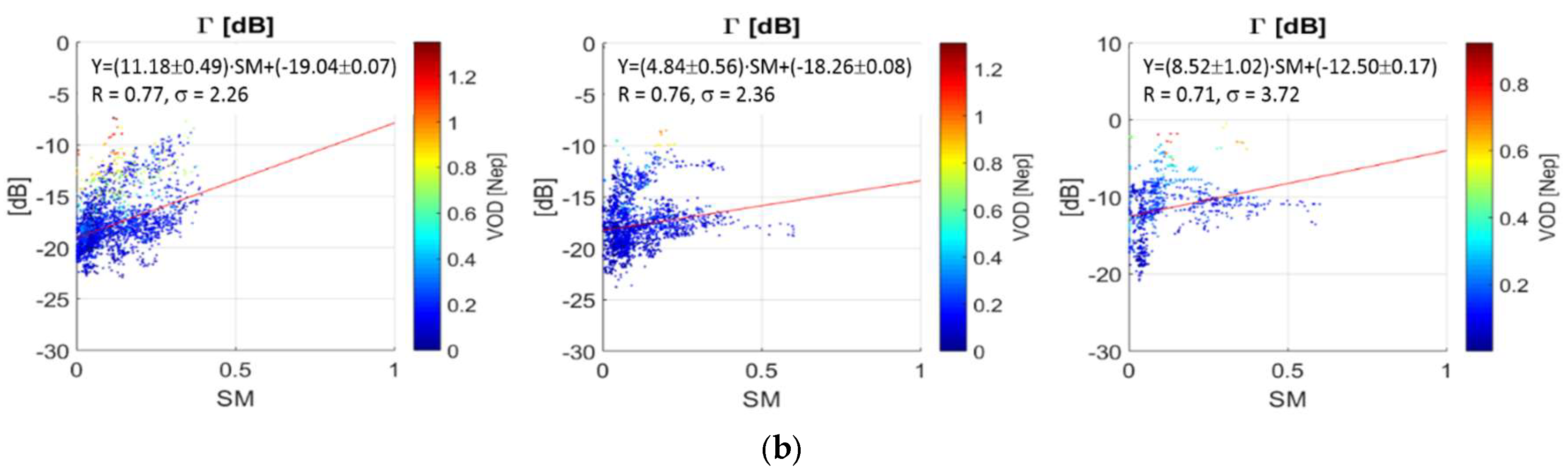
3.2.3. Yanco/NSW/Australia
SMOS L3 SM Sensitivity
SMOS L4 SM Sensitivity
3.3. TDS-1 Data Analysis Using In-situ Soil Moisture Data
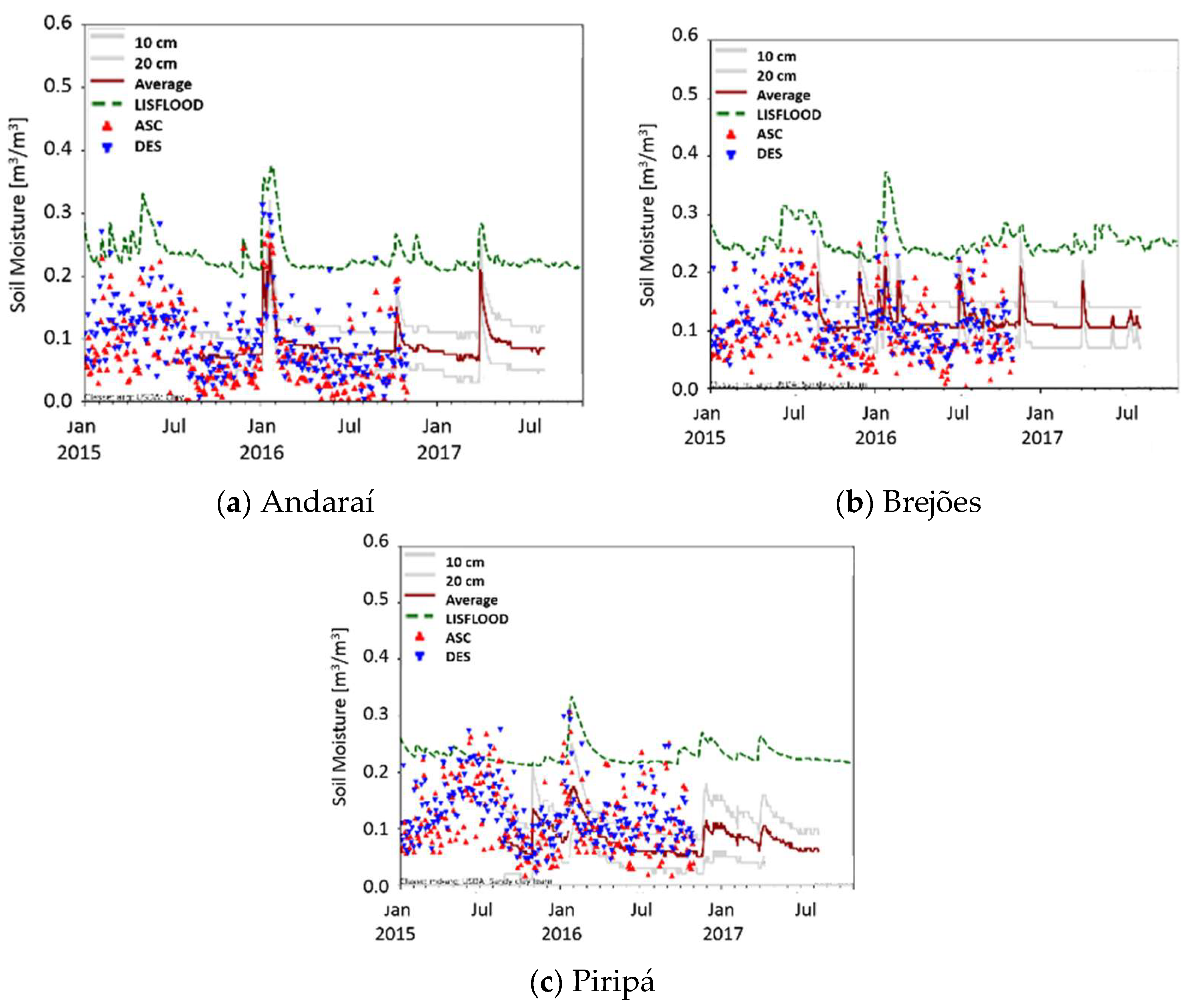
3.4. TDS-1 Data Analysis Using Hydrological Models
4. Discussion
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Chew, C.; Shah, R.; Zuffada, C.; Hajj, G.; Masters, D.; Mannucci, A.J. Demonstrating soil moisture remote sensing with observations from the UK TechDemoSat-1 satellite mission. Geophys. Res. Lett. 2016, 43, 3317–3324. [Google Scholar] [CrossRef]
- Camps, A.; Park, H.; Pablos, M.; Foti, G.; Gommenginger, C.P.; Liu, P.; Judge, J. Sensitivity of GNSS-R Spaceborne Observations to Soil Moisture and Vegetation. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2016, 9, 4730–4742. [Google Scholar] [CrossRef]
- Chew, C.; Small, E.E. Soil Moisture sensing using spaceborne GNSS reflections: Comparison of CYGNSS reflectivity to SMAP soil moisture. Geophys. Res. Lett. 2018, 45, 4049–4057. [Google Scholar] [CrossRef]
- Carreno-Luengo, H.; Luzi, G.; Crosetto, M. Impact of the Elevation Angle on CYGNSS-R Bistatic Reflectivity as a function of the Effective Surface Roughness Over Land Surfaces. Remote Sens. 2018, 10, 1749. [Google Scholar] [CrossRef]
- Zavorotny, V.U.; Gleason, S.; Cardellach, E.; Camps, A. Tutorial on Remote Sensing Using GNSS Bistatic Radar of Opportunity. IEEE Geosci. Remote Sens. Mag. 2014, 2, 8–45. [Google Scholar] [CrossRef]
- Foti, G.; Gommenginger, C.; Unwin, M.; Jales, P.; Tye, J.; Roselló, J. An Assessment of Non-geophysical Effects in Spaceborne GNSS Reflectometry Data from the UK TechDemoSat-1 Mission. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2017, 10, 3418–3429. [Google Scholar] [CrossRef]
- Camps, A.; Park, H.; Juan, J.M.; Sanz, J.; González-Casado, G.; Barbosa, J.; Fabbro, V.; Lemorton, J.; Orús, R. Ionospheric Scintillation Monitoring Using GNSS-R? In Proceedings of the 2018 IEEE International Geoscience and Remote Sensing Symposium, IGARSS 2018, Valencia, Spain, 23–27 July 2018. [Google Scholar]
- Schwank, M.; Naderpour, R.; Mätzler, C. Tau-Omega-and Two-Stream Emission Models used for Passive L-band Retrievals: Application to Close-Range Measurements over a Forest. Remote Sens. 2018, in press. [Google Scholar]
- O’Neill, P.; Chan, S. Soil Moisture Active Passive (SMAP) Project Algorithm Theoretical Basis Document SMAP L2 and L3 Radiometer Soil Moisture (Passive) Data Products: L2_SM_P L3_SM_P. Available online: https://nsidc.org/sites/nsidc.org/files/files/data/smap/pdfs/l2&3_sm_p_v4_oct2012.pdf (accessed on 30 September 2018).
- Barcelona Expert Center. Remote Sensing Research, Data Distribution and Visualization Services: Land Variables. Available online: http://bec.icm.csic.es/land-datasets/ (accessed on 11 November 2018).
- Kerr, Y.H.; Waldteufel, P.; Wigneron, J.P.; Delwart, S.; Cabot, F.; Boutin, J.; Escorihuela, M.J.; Font, J.; Reul, N.; Gruhier, C.; et al. The SMOS Mission: New Tool for Monitoring Key Elements of the Global Water Cycle. Proc. IEEE 2010, 98, 666–687. [Google Scholar] [CrossRef]
- Font, J.; Camps, A.; Borges, A.; Martin-Neira, M.; Boutin, J.; Reul, N.; Kerr, Y.H.; Hahne, A.; Mecklenburg, S. SMOS: The Challenging Sea Surface Salinity Measurement from Space. Proc. IEEE 2010, 98, 649–665. [Google Scholar] [CrossRef]
- Piles, M.; Sánchez, N.; Vall-llossera, M.; Camps, A.; Martínez-Fernández, J.; Martínez, J.; González-Gambau, V. A Downscaling Approach for SMOS Land Observations: Evaluation of High-Resolution Soil Moisture Maps Over the Iberian Peninsula. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2014, 7, 3845–3857. [Google Scholar] [CrossRef]
- Portal, G.; Vall-llossera, M.; Piles, M.; Camps, A.; Chaparro, D.; Pablos, M.; Rossato, L. A Spatially Consistent Downscaling Approach for SMOS Using an Adaptive Moving Window. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2018, 11, 1883–1894. [Google Scholar] [CrossRef]
- Mapa Interativo da Rede Observacional para Monitoramento de Risco de Desastres Naturais do Cemaden. Available online: http://www.cemaden.gov.br/mapainterativo/# (accessed on 2 July 2018).
- Celaschi, S.; Xavier, A.L., Jr. Status of a Brazilian Automatic Hydro-meteorological territorial network. In Proceedings of the XXXIV Simpósio Brasileiro de Telecomunicaçoes, SBrT2016, Santarem, Brazil, 30 August–2 September 2016. [Google Scholar]
- Du, J.; Kimball, J.S.; Moghaddam, M. Theoretical Modeling and Analysis of L- and P-band Radar Backscatter Sensitivity to Soil Active Layer Dielectric Variations. Remote Sens. 2015, 7, 9450–9472. [Google Scholar] [CrossRef]
- Zwieback, S.; Hensley, S.; Hajnsek, I. Assessment of soil moisture effects on L-band radar interferometry. Remote Sens. Environ. 2015, 164, 77–89. [Google Scholar] [CrossRef]
- Thornthwaite, C.W.; Mather, J.R. The Water Balance; Laboratory of Climatology: Centerton, NJ, USA, 1955. [Google Scholar]
- Thornthwaite, C.W.; Mather, J.R. Instructions and Tables for Computing Potential Evapotranspiration and the Water Balance. Laboratory in Climatology, Drexel Institute of Technology: Philadelphia, PA, USA, 1957; Volume 10, pp. 185–311. [Google Scholar]
- Burek, P.; van der Knijff, J.M.; de Roo, A. LISFLOOD—Distributed Water Balance and flood Simulation Model—Revised User Manual; 2013. Available online: http://publications.jrc.ec.europa.eu/repository/bitstream/JRC78917/lisflood_2013_online.pdf (accessed on 16 November 2018).
- Monitoramento de Umidade do Solo no Sudeste da América do Sul. Available online: http://musa.cptec.inpe.br/ (accessed on 2 July 2018).
- Doyle, M.E.; Tomasella, J.; Rodriguez, D.A.; Chou, S.C. Experiments using new initial soil moisture conditions and soil map in the Eta model over La Plata Basin. Meteorol. Atmos. Phys. 2013, 121, 119–136. [Google Scholar] [CrossRef]
- Marengo, J.A.; Torres, R.R.; Alves, L.M. Drought in Northeast Brazil—Past, present, and future. Theor. Appl. Clim. 2016, 20, 1189–1200. [Google Scholar] [CrossRef]
- Holland, P.W.; Welsch, R.E. Robust Regression Using Iteratively Reweighted Least-Squares. Commun. Stat. Theory Methods 1977, 6, 813–827. [Google Scholar] [CrossRef]
- Rossato, L.; Marengo, J.A.; de Angelis, C.F.; Pires, L.B.M.; Mendiondo, E.M. Impact of soil moisture over Palmer Drought Severity Index and its future projections in Brazil. RBRH 2017, 22, e36. [Google Scholar] [CrossRef]
- Rossato, L.; Vall-llossera, M.; Camps, A.; Piles, M.; Portal, G.; Chaparro, D.; Alvalá, R. Validation of the SMOS-BEC products in different networks. In Proceedings of the Satellite Soil Moisture Validation and Application Workshop, Wien, Austria, 19–20 September 2017; Available online: http://smw.geo.tuwien.ac.at/abstract-booklet (accessed on 16 November 2018).




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| CEMADEN Stations | Latitude | Longitude | SMOS | LISFLOOD | ||
|---|---|---|---|---|---|---|
| Asc | Des | Asc | Des | |||
| Abaíra | −13.26 | −41.66 | 0.65 | 0.58 | 0.57 | 0.44 |
| Andaraí | −12.59 | −41.01 | 0.75 | 0.72 | 0.7 | 0.59 |
| Aracatu | −14.45 | −41.45 | 0.75 | 0.52 | 0.63 | 0.52 |
| Barro Alto | −11.81 | −41.90 | 0.61 | 0.51 | 0.59 | 0.53 |
| Bom Jesus da Serra | −14.38 | −40.49 | 0.65 | 0.55 | 0.5 | 0.39 |
| Brejões | −13.10 | −39.79 | 0.47 | 0.37 | 0.43 | 0.44 |
| Cabeceiras do Paraguaçu | −12.62 | −39.23 | 0.49 | 0.44 | 0.5 | 0.52 |
| Caldeirão Grande | −11.05 | −40.15 | 0.57 | 0.31 | 0.33 | 0.31 |
| Cândido Sales | −15.51 | −41.15 | 0.72 | 0.62 | 0.41 | 0.36 |
| Castro Alves | −12.75 | −39.44 | 0.53 | 0.48 | 0.31 | 0.3 |
| Dom Basílio | −13.75 | −41.77 | 0.64 | 0.53 | 0.65 | 0.46 |
| Ibicoara | −13.45 | −41.30 | 0.74 | 0.59 | 0.51 | 0.41 |
| Ipecaetá | −12.29 | −39.32 | 0.52 | 0.40 | 0.39 | 0.24 |
| Itaeté | −13.03 | −40.96 | 0.63 | 0.59 | 0.61 | 0.53 |
| Jeremoabo | −10.00 | −38.33 | 0.15 | 0.1 | 0.15 | 0.11 |
| Jussara | −10.96 | −41.94 | 0.69 | 0.59 | 0.69 | 0.59 |
| Lajedo do Tabocal | −13.43 | −40.24 | 0.49 | 0.36 | 0.37 | 0.32 |
| Lamarão | −11.82 | −38.87 | 0.3 | 0.4 | 0.38 | 0.42 |
| Mundo Novo | −11.86 | −40.48 | 0.5 | 0.5 | 0.51 | 0.53 |
| Canarana | −14.66 | −40.27 | 0.49 | 0.39 | 0.37 | 0.29 |
| Nova Itarana | −13.00 | −40.01 | 0.36 | 0.34 | 0.35 | 0.2 |
| Palmeiras | −12.52 | −41.57 | 0.55 | 0.56 | 0.49 | 0.41 |
| Piripá | −15.01 | −41.74 | 0.08 | 0.1 | 0.17 | 0.2 |
| Planalto | −14.60 | −40.48 | 0.73 | 0.66 | 0.28 | 0.66 |
| São Gabriel | −11.22 | −41.90 | 0.5 | 0.53 | 0.37 | 0.3 |
| Г = (a ± Δa)·SM + (b ± Δb) | ||||||||||||
| a | Δa | b | Δb | |||||||||
| NO | R | V + R | NO | R | V + R | NO | R | V + R | NO | R | V + R | |
| 0° to 30° | 6.76 | 6.47 | 8.75 | 0.20 | 0.20 | 0.20 | −19.52 | −18.92 | −16.26 | 0.17 | 0.17 | 0.21 |
| 30° to 60° | 2.47 | 2.20 | 5.66 | 0.10 | 0.10 | 0.20 | −19.92 | −19.32 | −16.13 | 0.12 | 0.12 | 0.20 |
| 60° to 90° | 0.35 | 0.04 | 2.78 | 0.20 | 0.20 | 0.50 | −14.70 | −14.10 | −8.22 | 0.24 | 0.24 | 0.54 |
| BRAZIL | IBERIAN PENINSULA | AUSTRALIA | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| Correct | 0°–30° | 30°–60° | 60°–90° | 0°–30° | 30°–60° | 60°–90° | 0°–30° | 30°–60° | 60°–90° | |
| SMOS L3 SM (25 km) | NO | 3.63 | 1.77 | 1.37 | 6.22 | 8.94 | −3.87 | 15.17 | −0.16 | 3.47 |
| R | 3.54 | 1.62 | 1.11 | 5.45 | 9.08 | −3.65 | 15.25 | 0.03 | 3.67 | |
| V | 9.45 | 5.84 | −3.17 | 12.97 | 11.57 | 22.69 | 18.47 | 2.61 | 10.39 | |
| V + R | 9.37 | 5.68 | −2.45 | 12.15 | 11.73 | 22.61 | 18.64 | 2.79 | 10.56 | |
| SMOS L2 SM (1 km) | NO | 2.44 | 1.26 | 2.67 | −4.2 | 8.63 | 2.82 | 7.71 | 3.66 | 5.24 |
| R | 2.30 | 2.55 | 1.13 | −4.46 | 8.6 | 2.53 | 7.99 | 3.7 | 5.34 | |
| V | 6.72 | 8.31 | 9.56 | −0.4 | 12.54 | −6.35 | 10.97 | 4.85 | 8.4 | |
| V + R | 6.62 | 8.17 | 9.44 | −1.1 | 12.51 | −6.74 | 11.18 | 4.84 | 8.52 | |
| BRAZIL | IBERIAN PENINSULA | AUSTRALIA | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| Correct | 0°–30° | 30°–60° | 60°–90° | 0°–30° | 30°–60° | 60°–90° | 0°–30° | 30°–60° | 60°–90° | |
| SMOS L3 SM (25 km) | NO | 12,143 | 19,678 | 5132 | 1763 | 1726 | 505 | 6392 | 6752 | 1815 |
| R | 12,108 | 19,649 | 5099 | 1733 | 1698 | 499 | 6390 | 6746 | 1815 | |
| V | 4455 | 7720 | 1741 | 489 | 723 | 204 | 2818 | 3295 | 706 | |
| V + R | 4455 | 7716 | 1741 | 486 | 719 | 204 | 2818 | 3295 | 706 | |
| SMOS L2 SM (1 km) | NO | 6473 | 11,672 | 2977 | 2477 | 1413 | 335 | 4992 | 5616 | 1805 |
| R | 6467 | 11,657 | 2945 | 1309 | 1308 | 368 | 4992 | 5610 | 1805 | |
| V | 2200 | 4419 | 1224 | 435 | 385 | 126 | 2871 | 2741 | 1139 | |
| V + R | 2200 | 4417 | 1224 | 849 | 552 | 134 | 2871 | 2741 | 1139 | |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Camps, A.; Vall·llossera, M.; Park, H.; Portal, G.; Rossato, L. Sensitivity of TDS-1 GNSS-R Reflectivity to Soil Moisture: Global and Regional Differences and Impact of Different Spatial Scales. Remote Sens. 2018, 10, 1856. https://doi.org/10.3390/rs10111856
Camps A, Vall·llossera M, Park H, Portal G, Rossato L. Sensitivity of TDS-1 GNSS-R Reflectivity to Soil Moisture: Global and Regional Differences and Impact of Different Spatial Scales. Remote Sensing. 2018; 10(11):1856. https://doi.org/10.3390/rs10111856
Chicago/Turabian StyleCamps, Adriano, Mercedes Vall·llossera, Hyuk Park, Gerard Portal, and Luciana Rossato. 2018. "Sensitivity of TDS-1 GNSS-R Reflectivity to Soil Moisture: Global and Regional Differences and Impact of Different Spatial Scales" Remote Sensing 10, no. 11: 1856. https://doi.org/10.3390/rs10111856
APA StyleCamps, A., Vall·llossera, M., Park, H., Portal, G., & Rossato, L. (2018). Sensitivity of TDS-1 GNSS-R Reflectivity to Soil Moisture: Global and Regional Differences and Impact of Different Spatial Scales. Remote Sensing, 10(11), 1856. https://doi.org/10.3390/rs10111856