Validation of Sensing Ocean Surface Currents Using Multi-Frequency HF Radar Based on a Circular Receiving Array


Abstract
:
1. Introduction
2. Methods
2.1. MHF-C Radar System
2.2. Radial Current Measurements
2.3. Signal Model and Estimation Method
3. Results
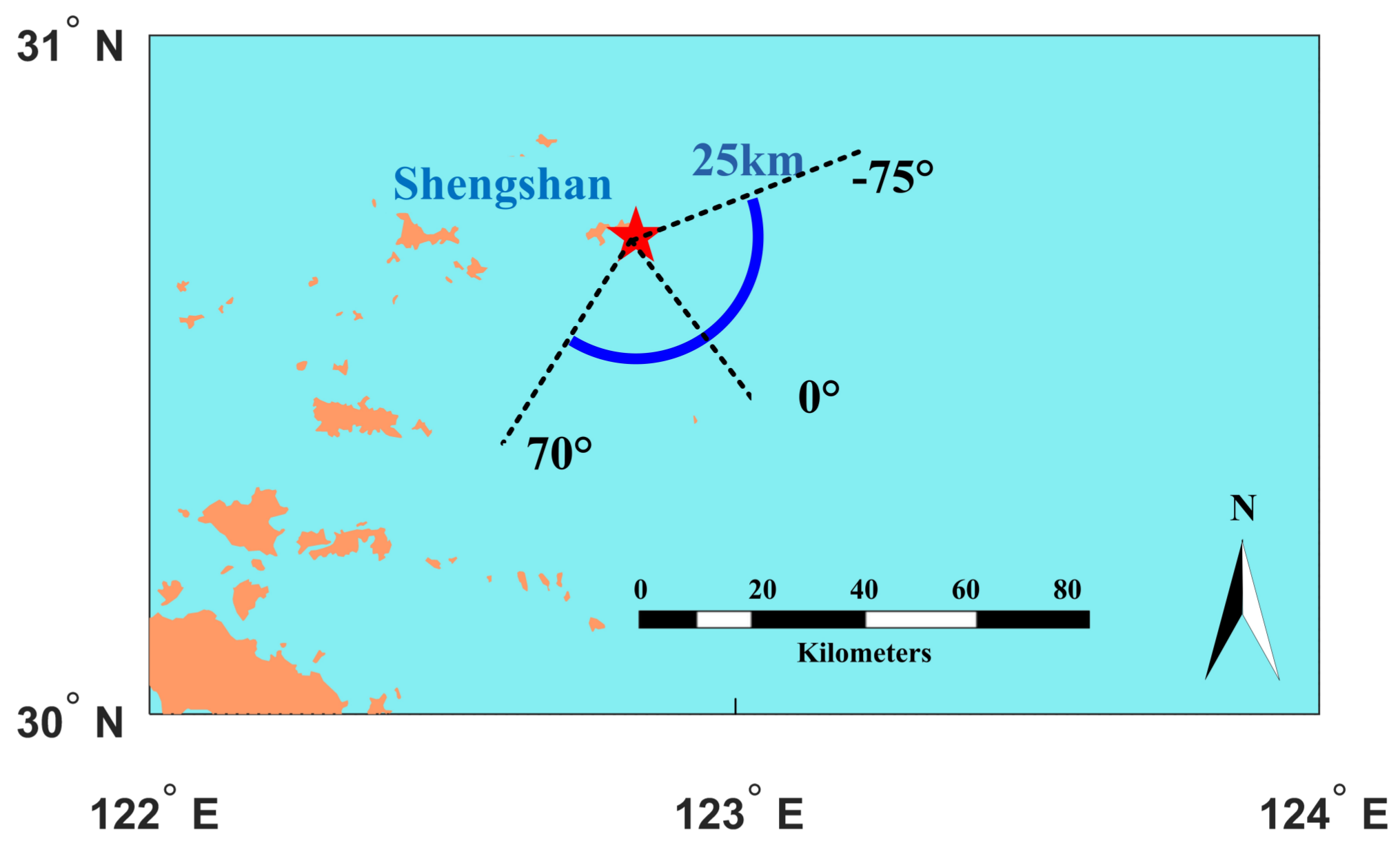
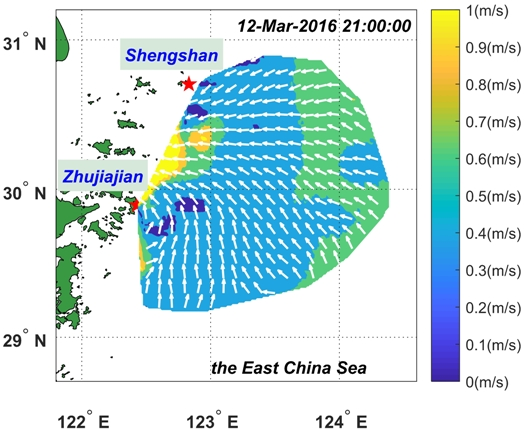
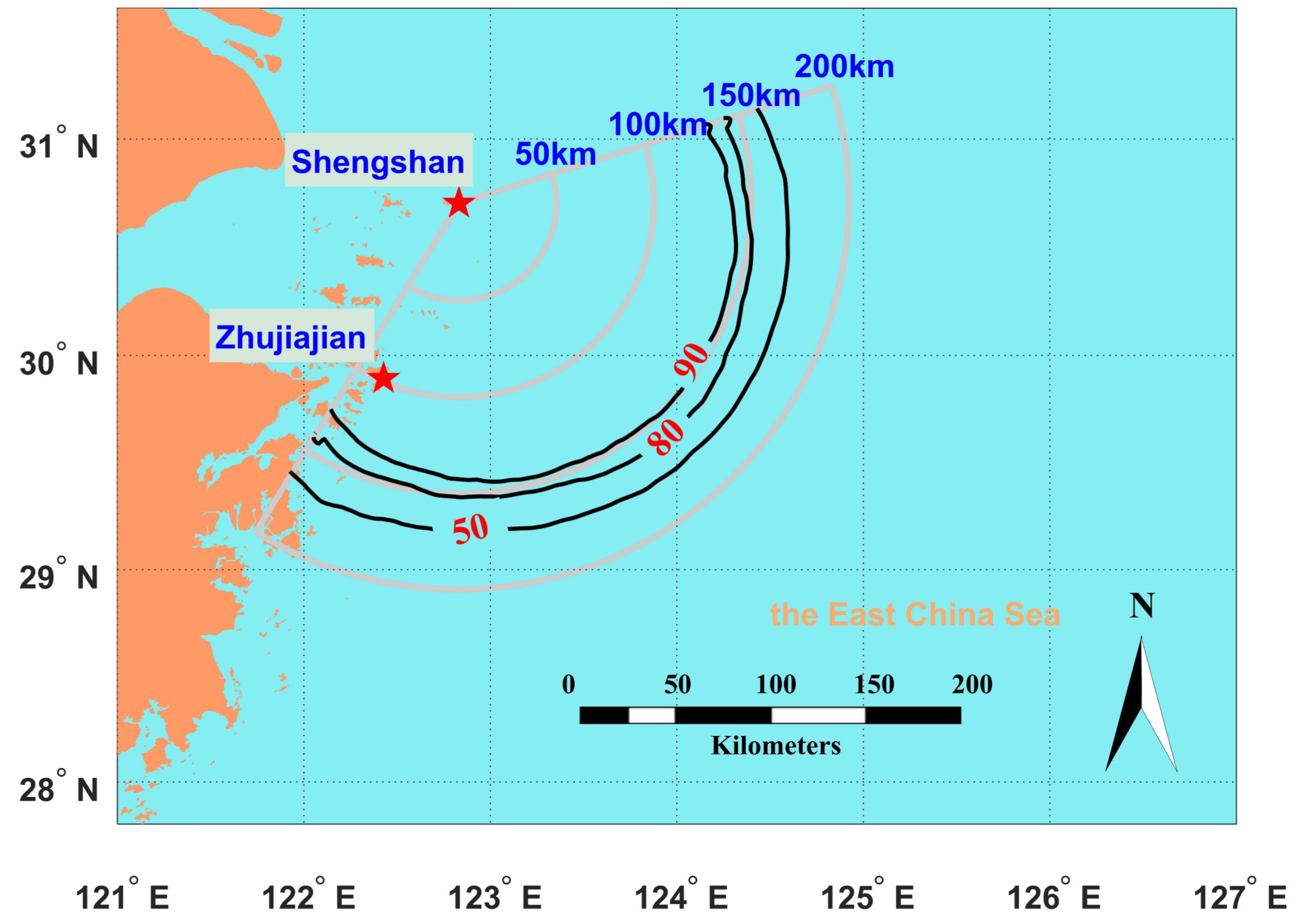
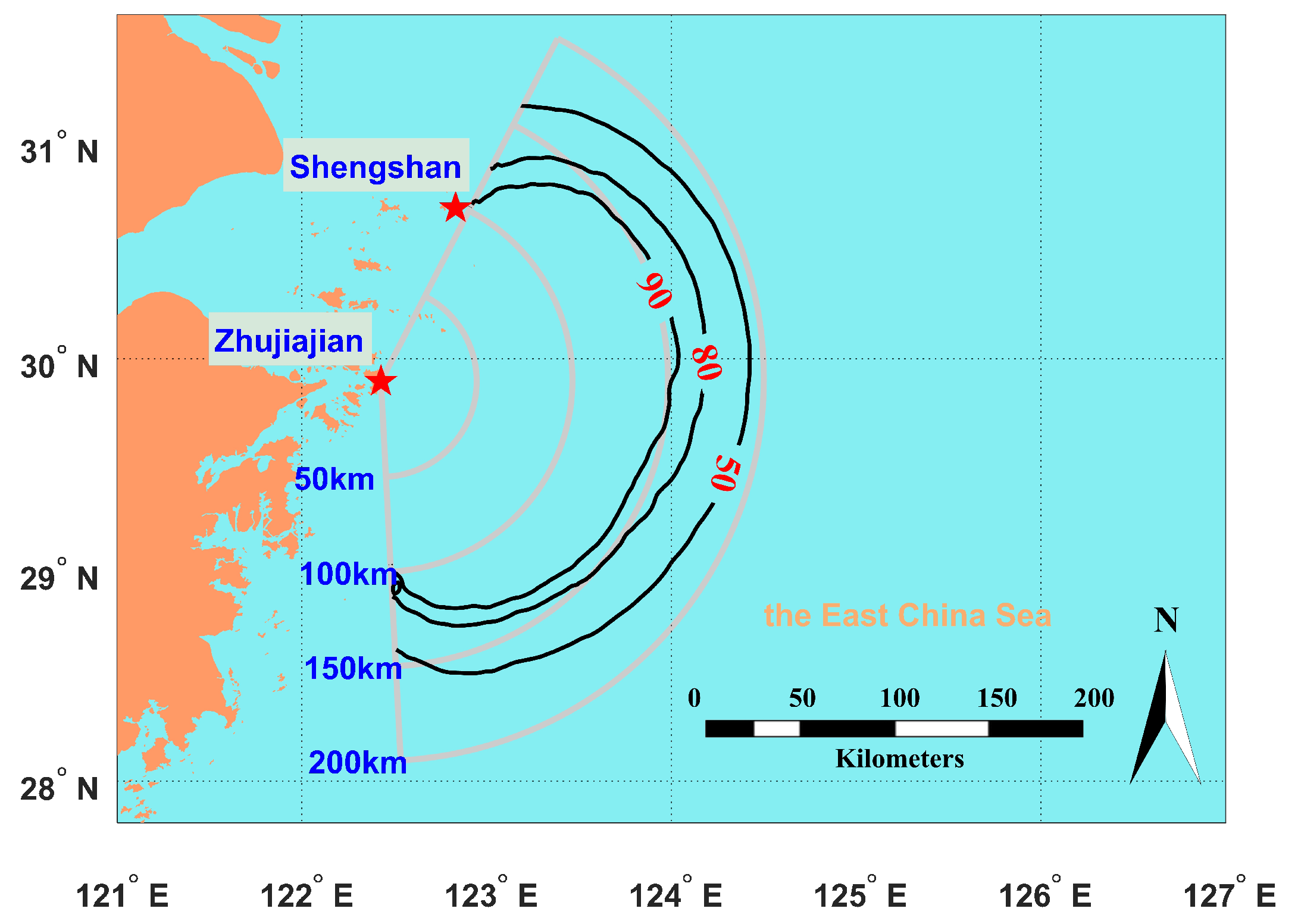
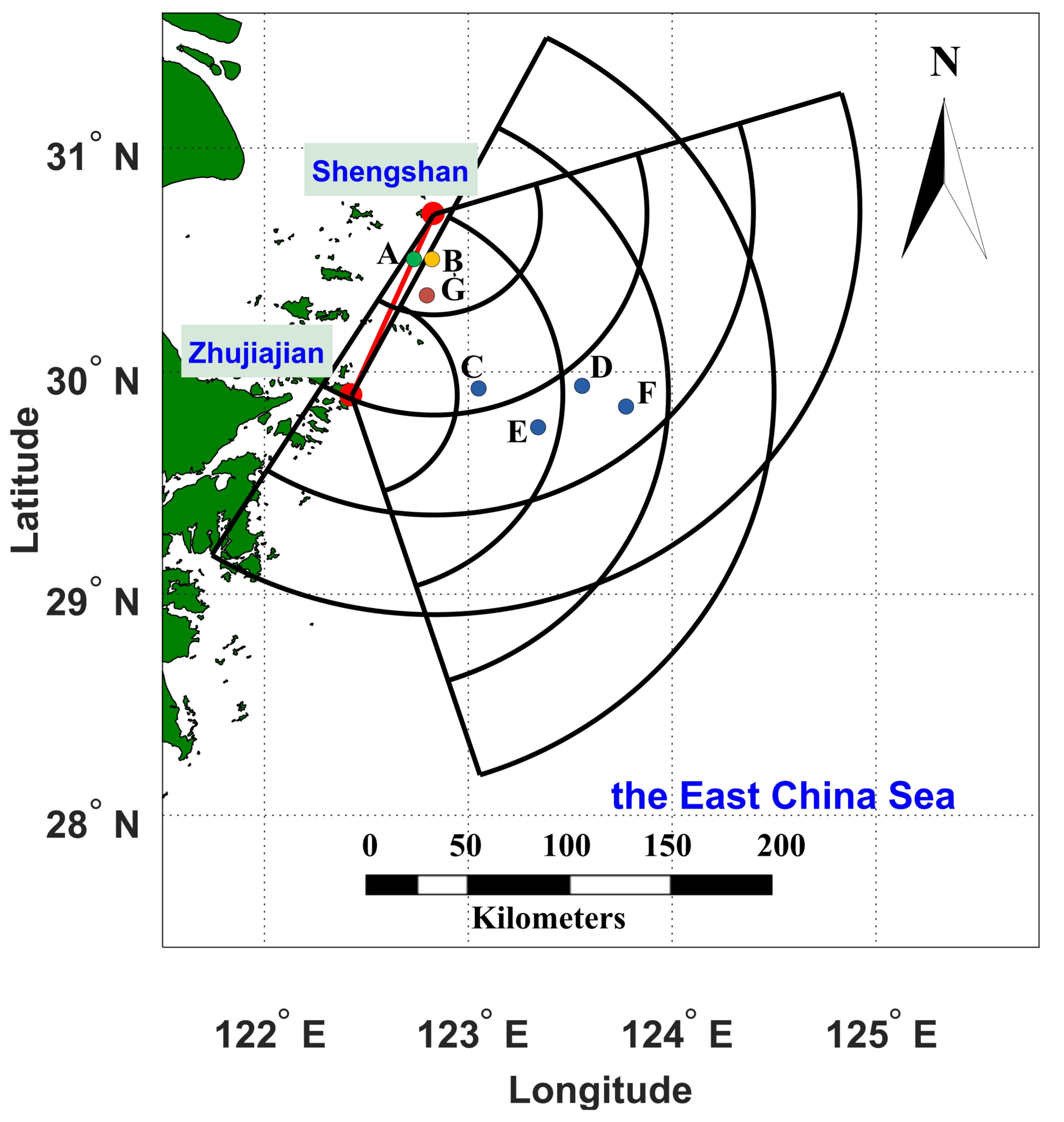
3.1. Spatial Coverage of Radial Currents
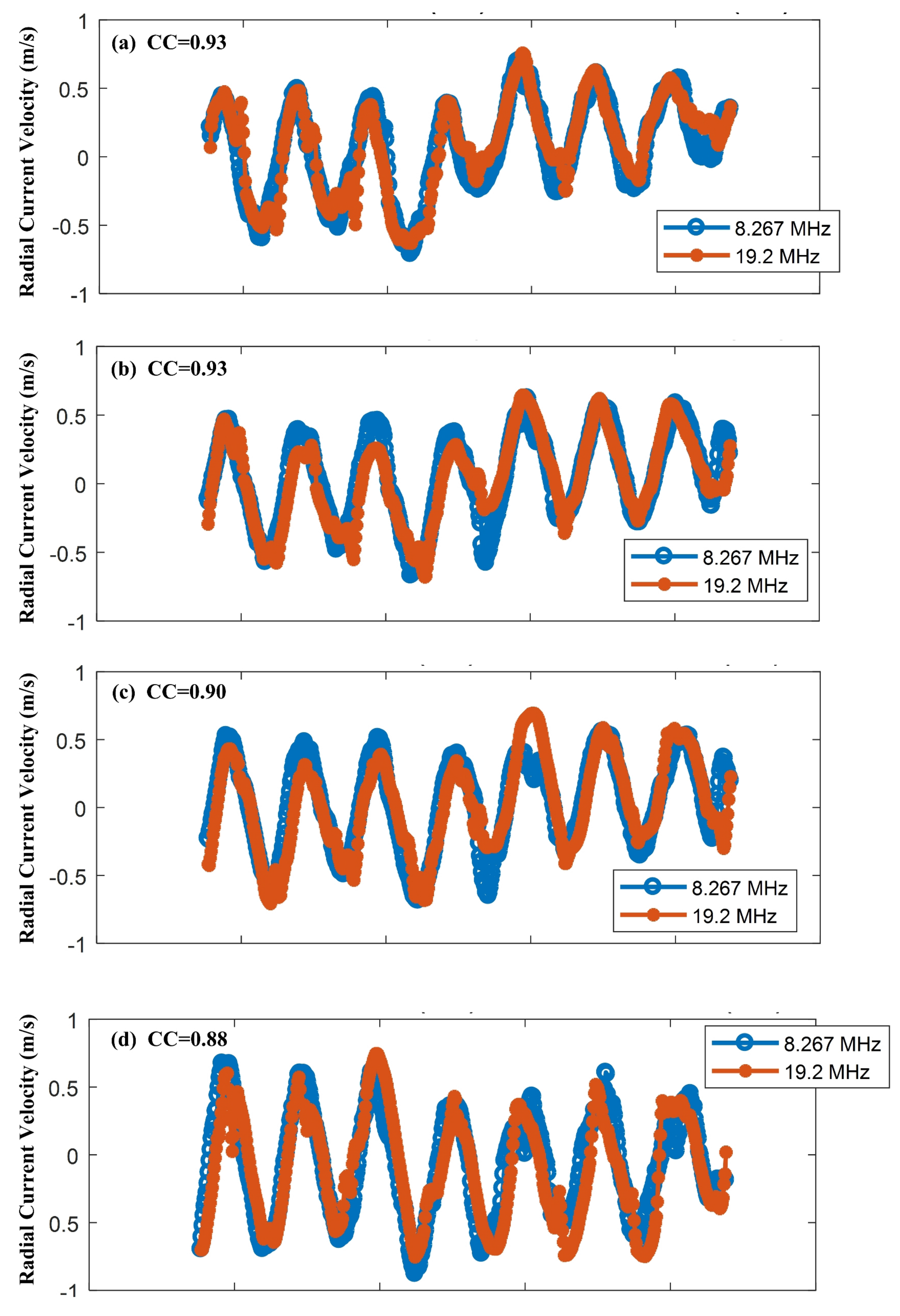
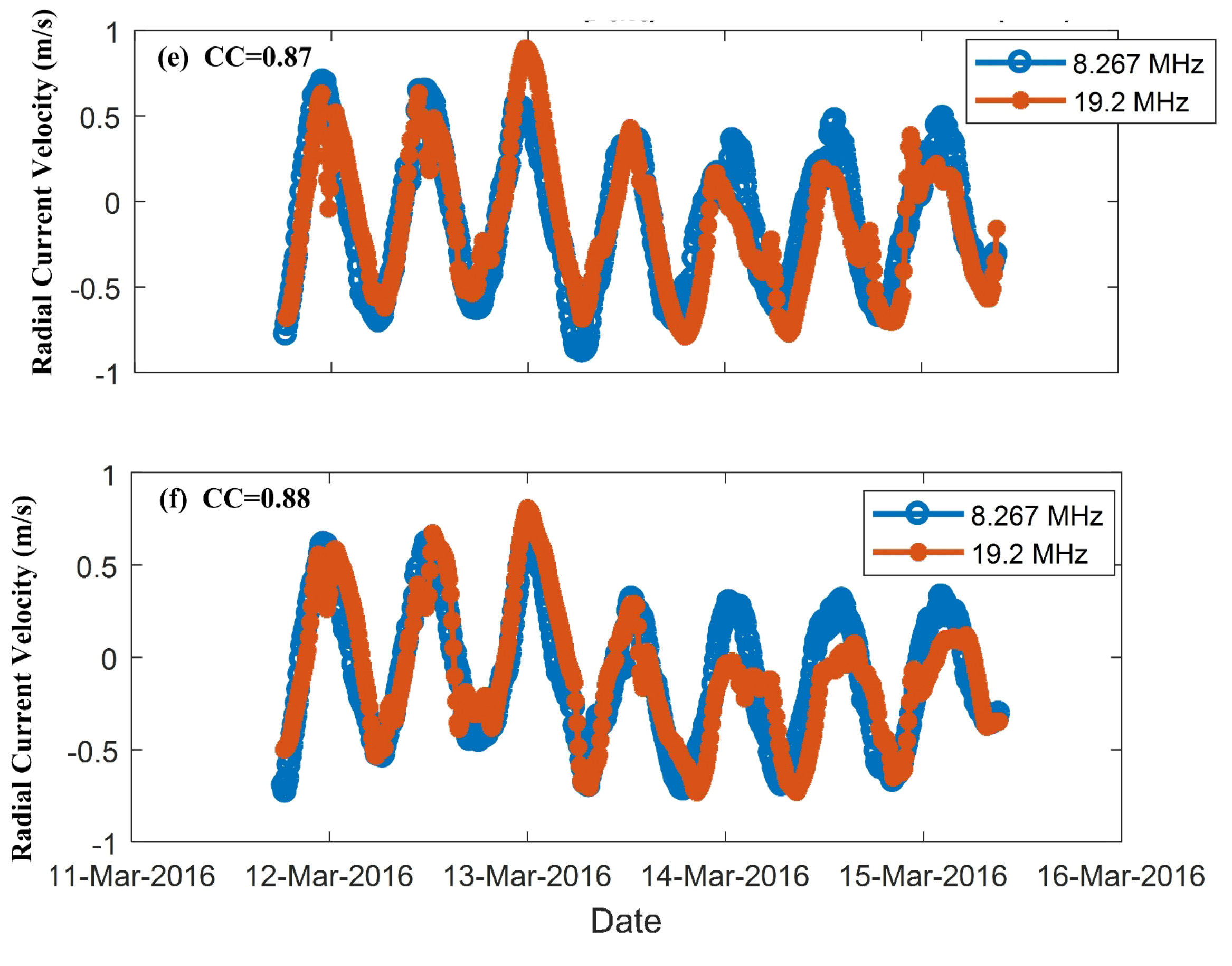
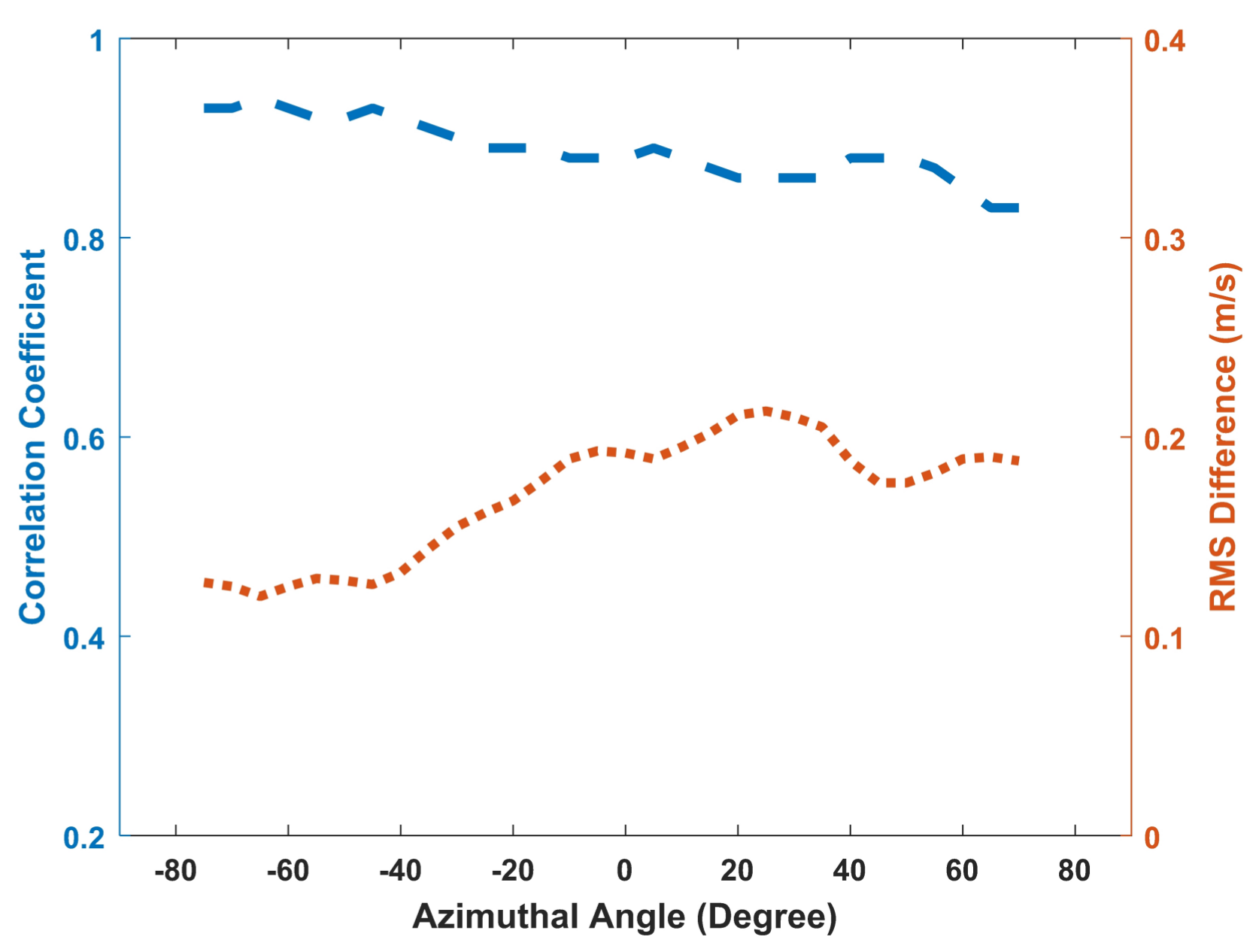
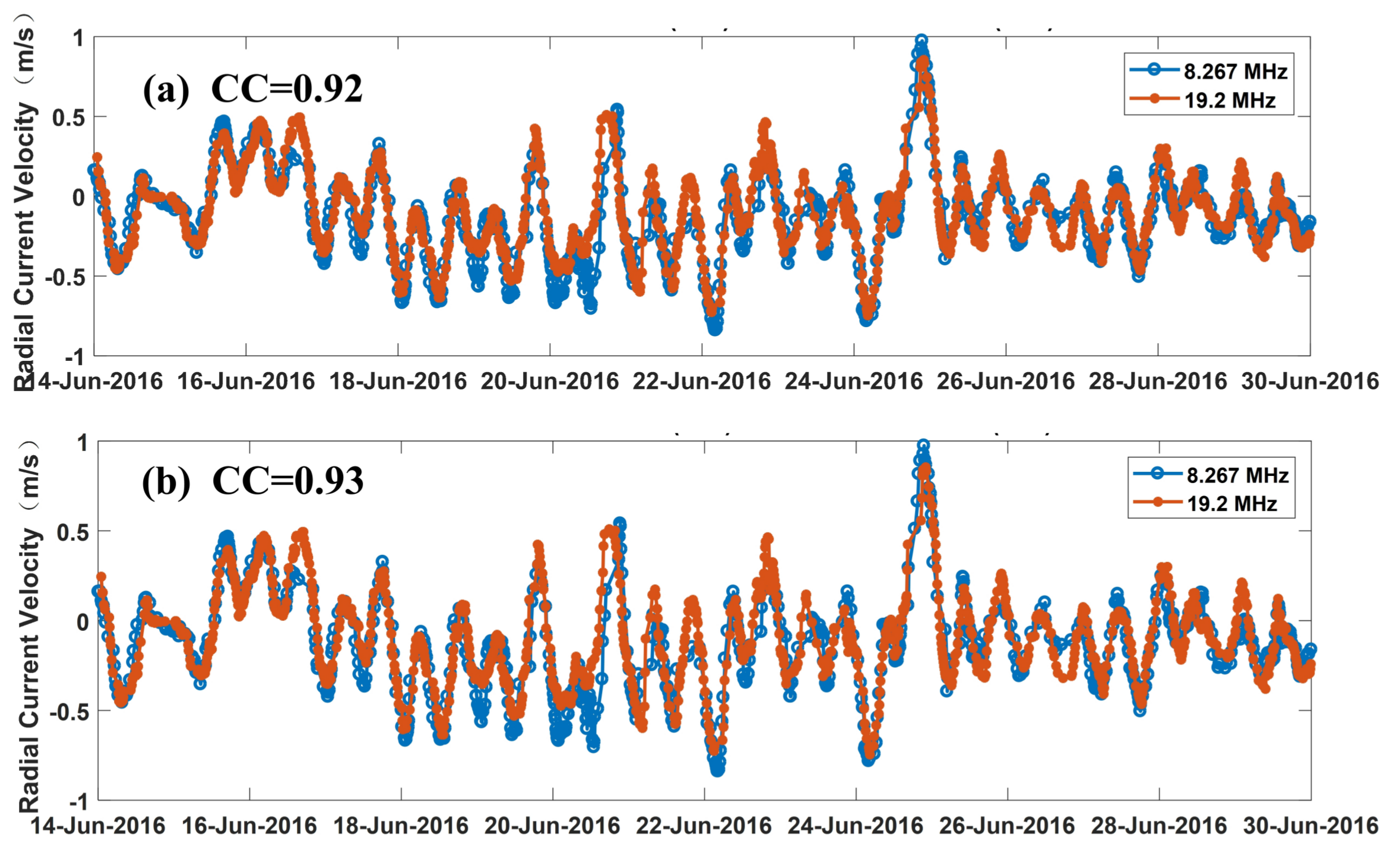
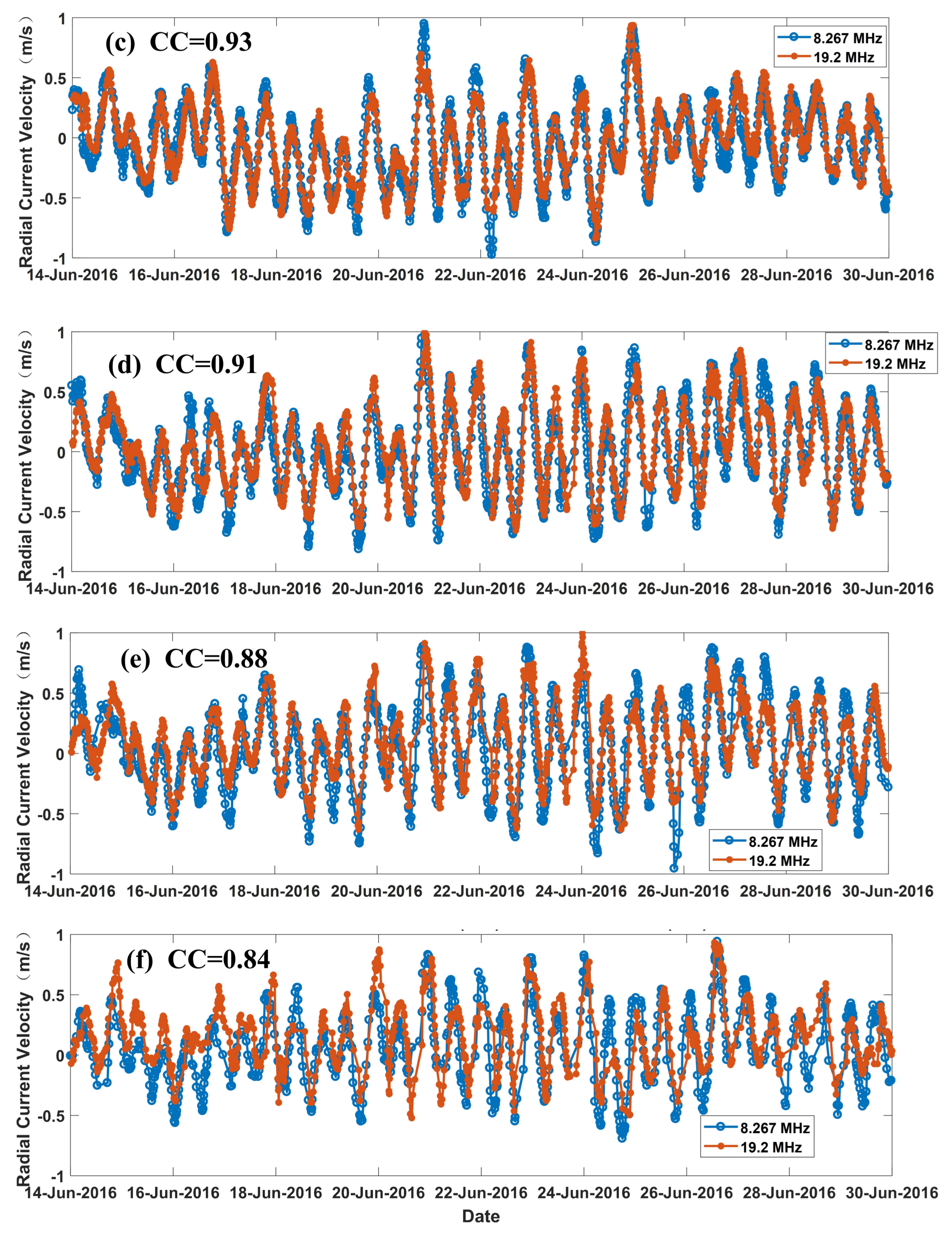
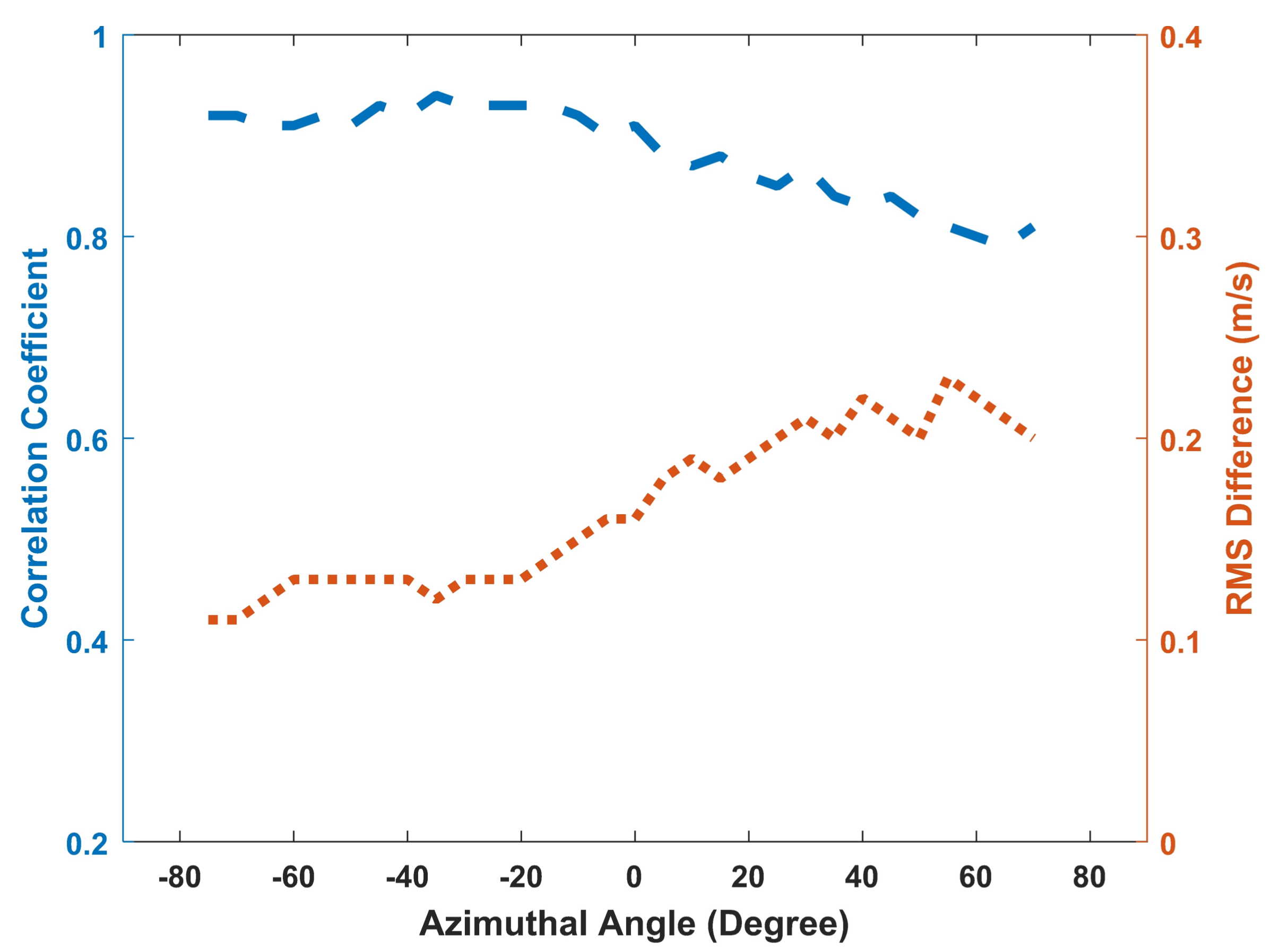
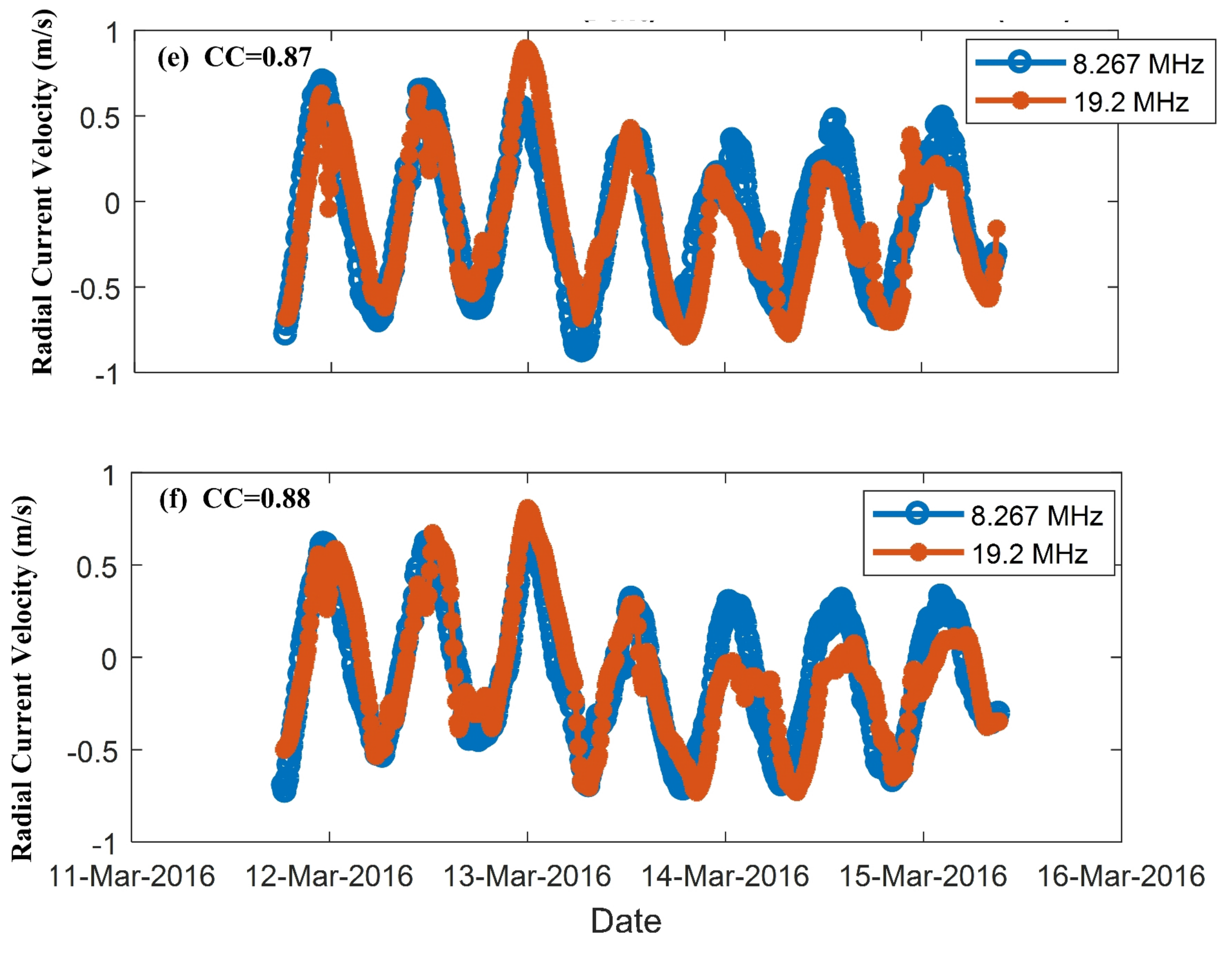
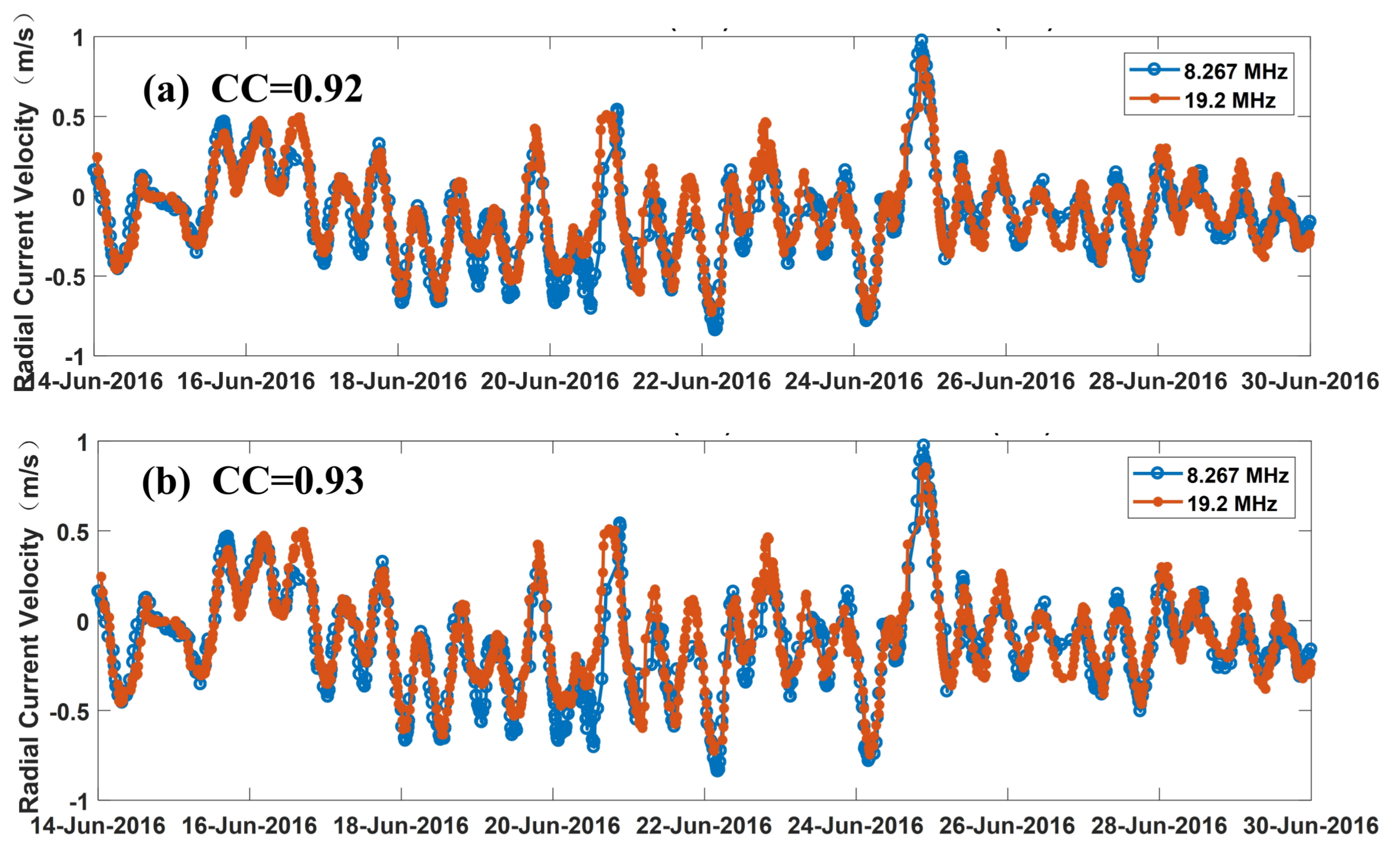
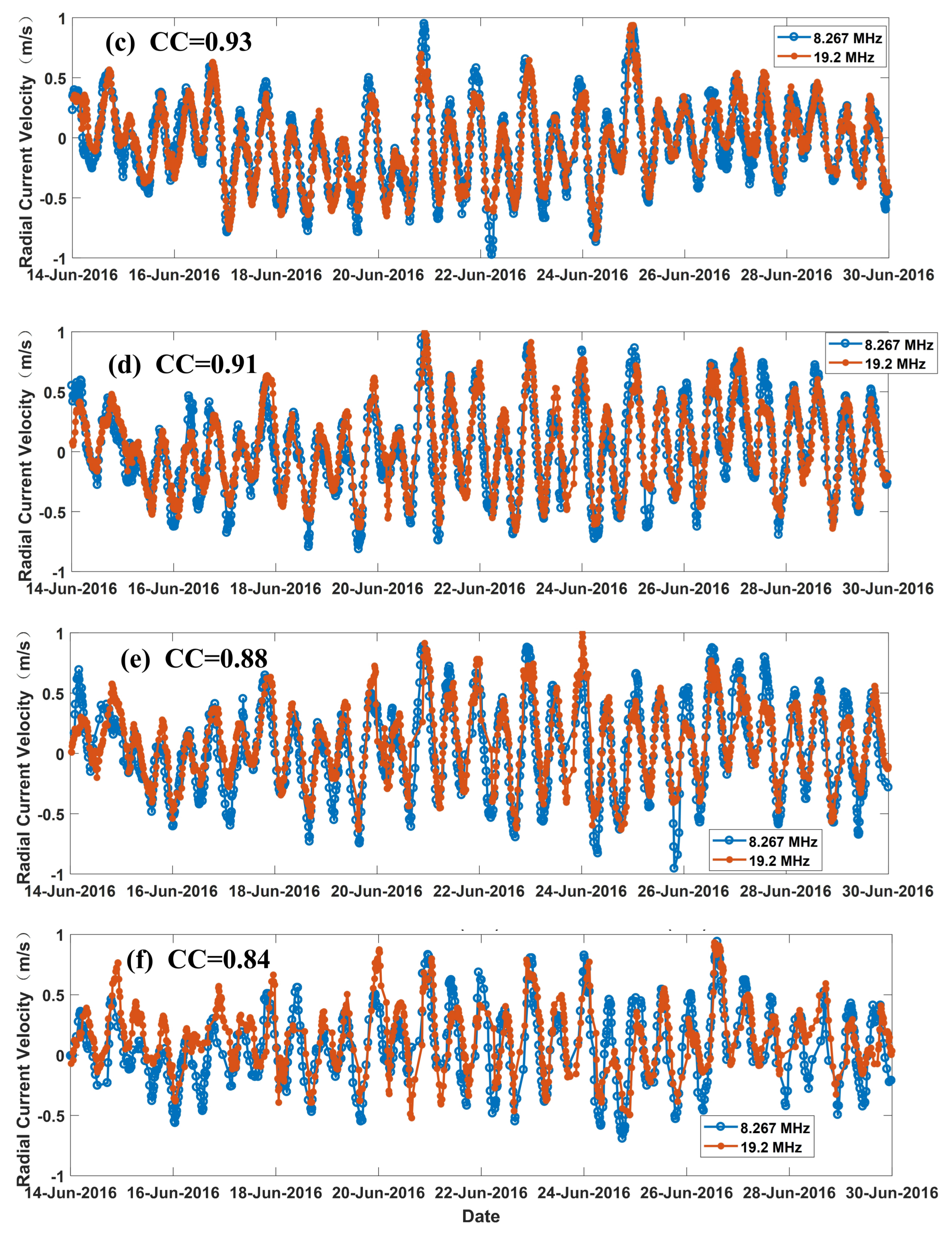
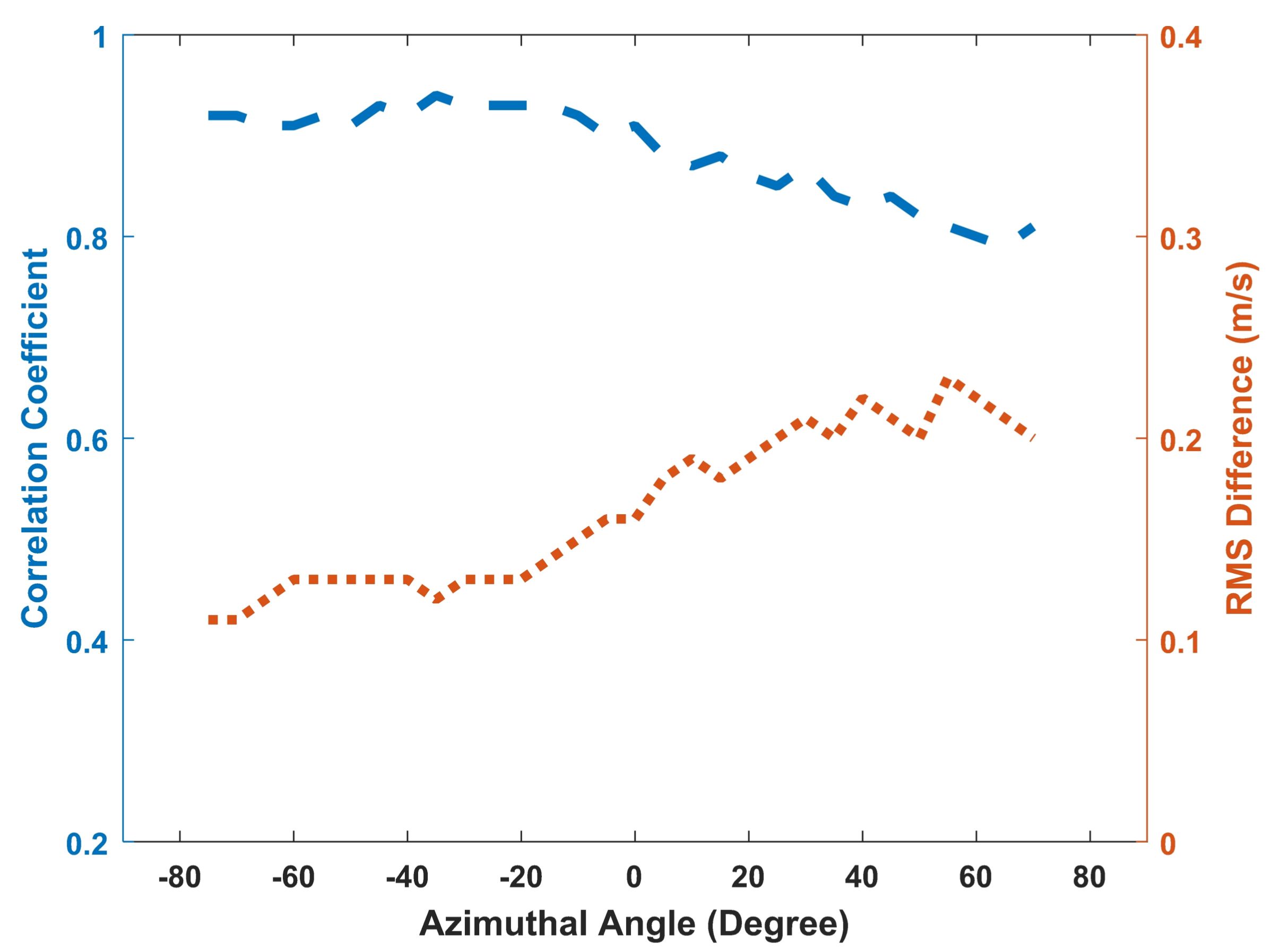
3.2. Comparisons between Two Operating Frequencies
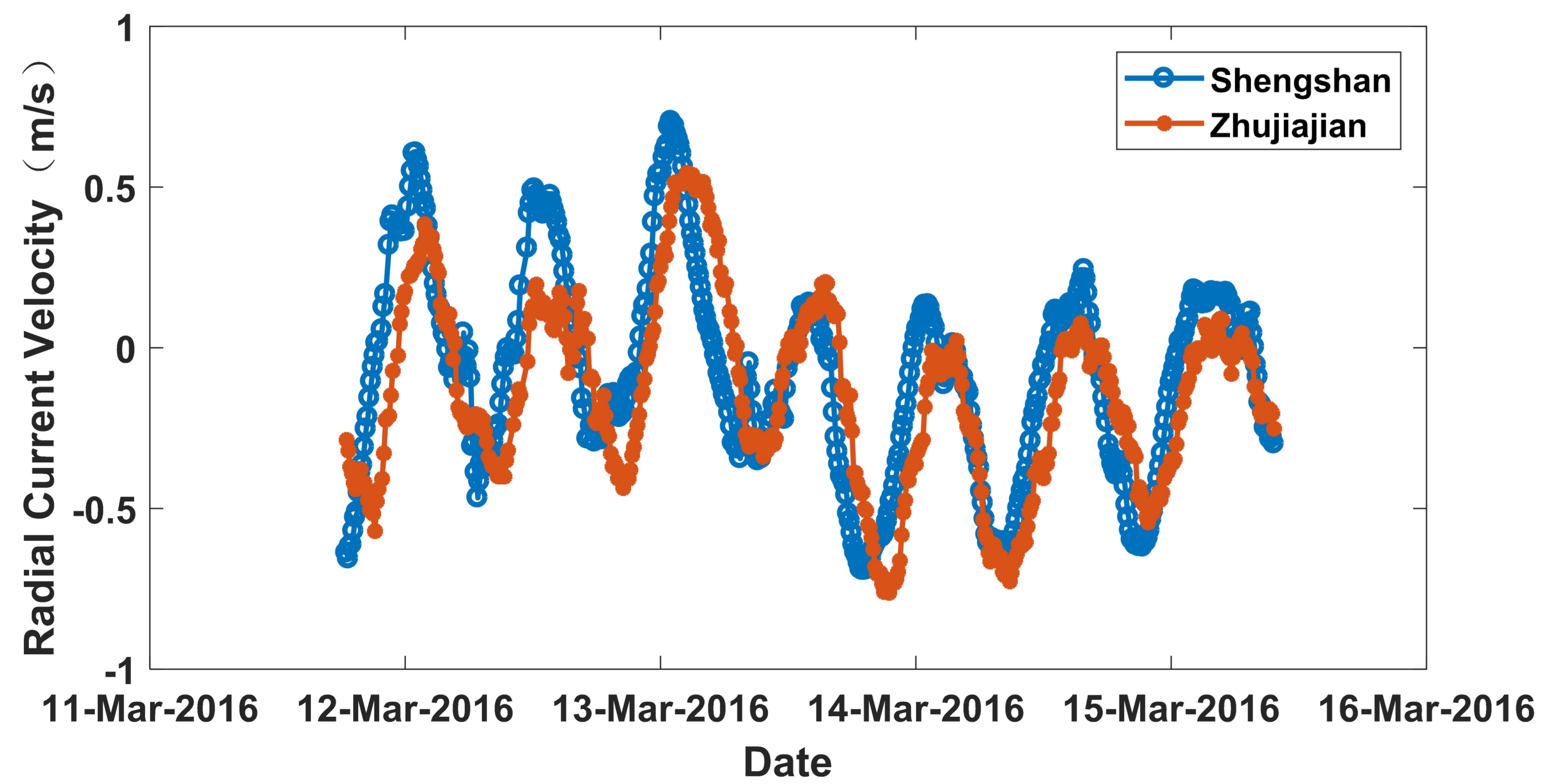
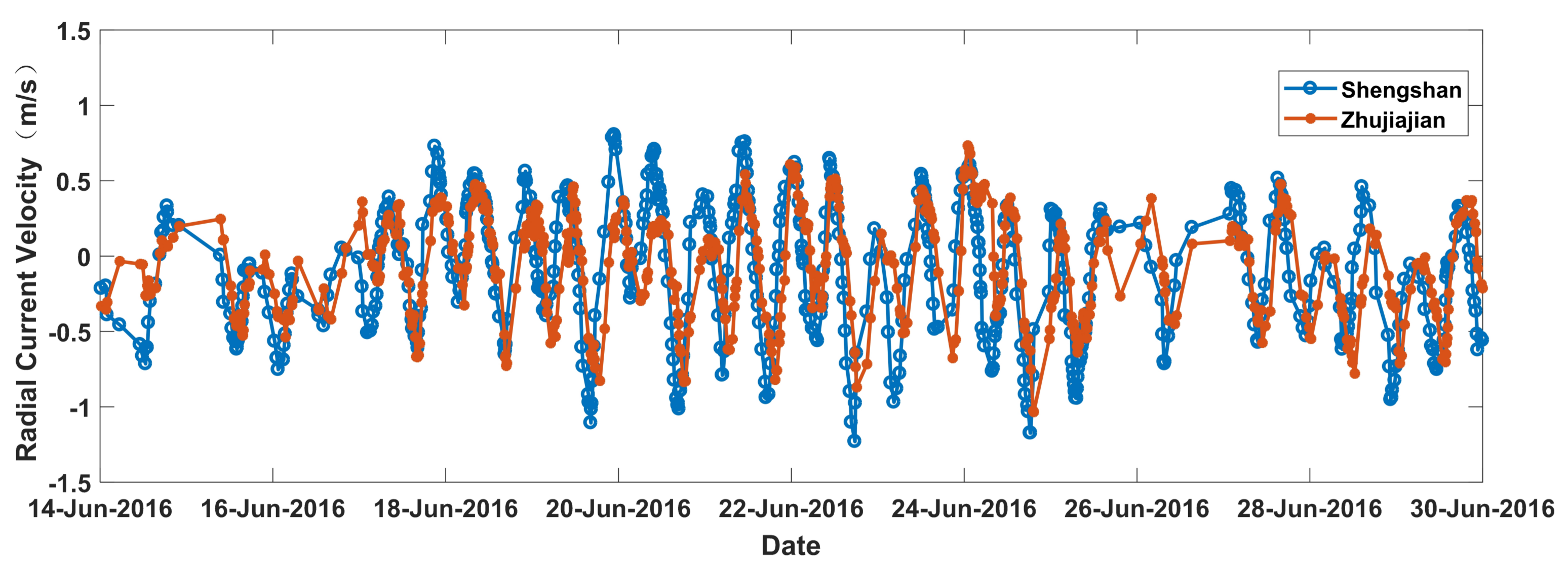
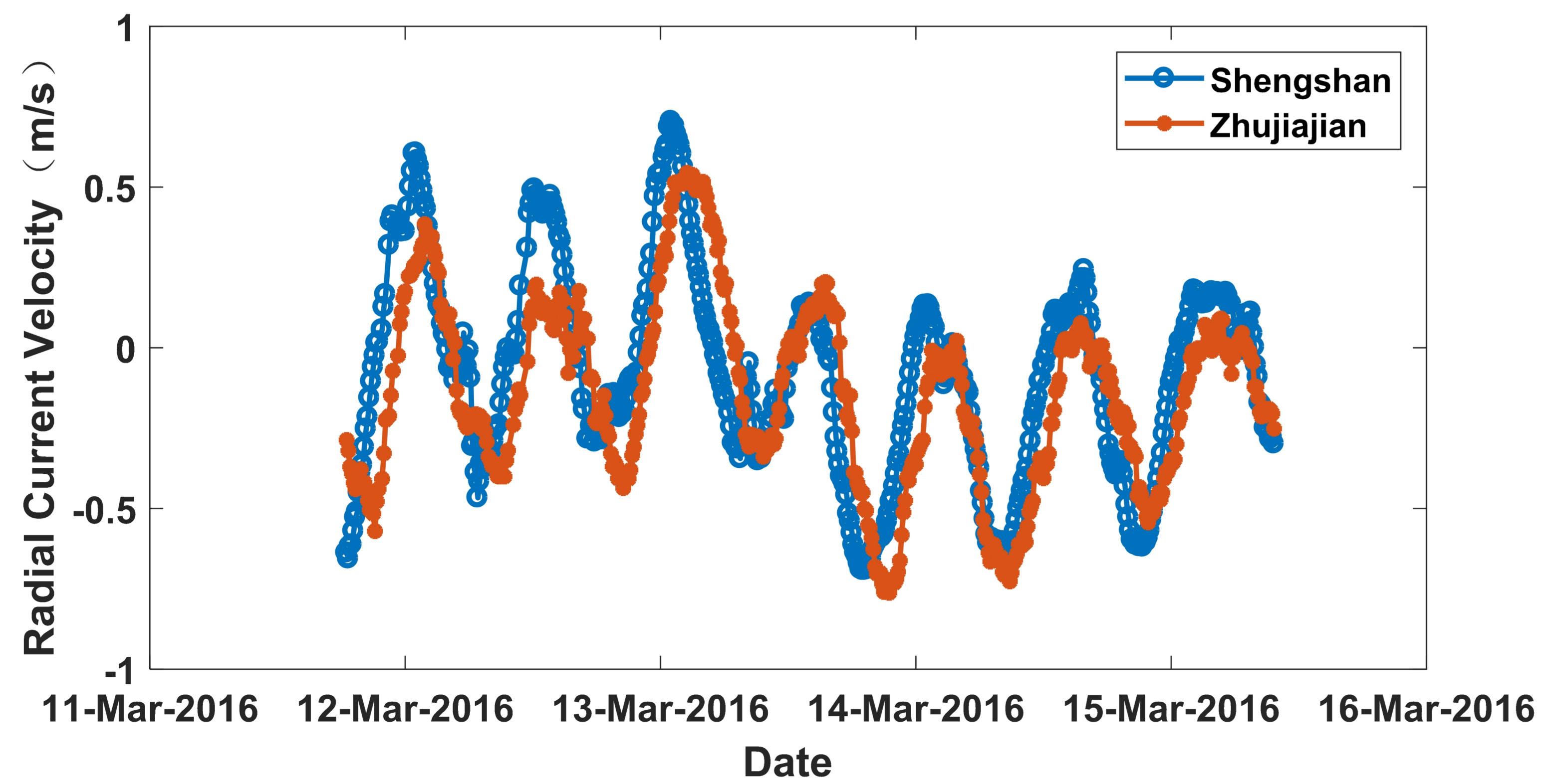
3.3. Comparisons between Two Radars
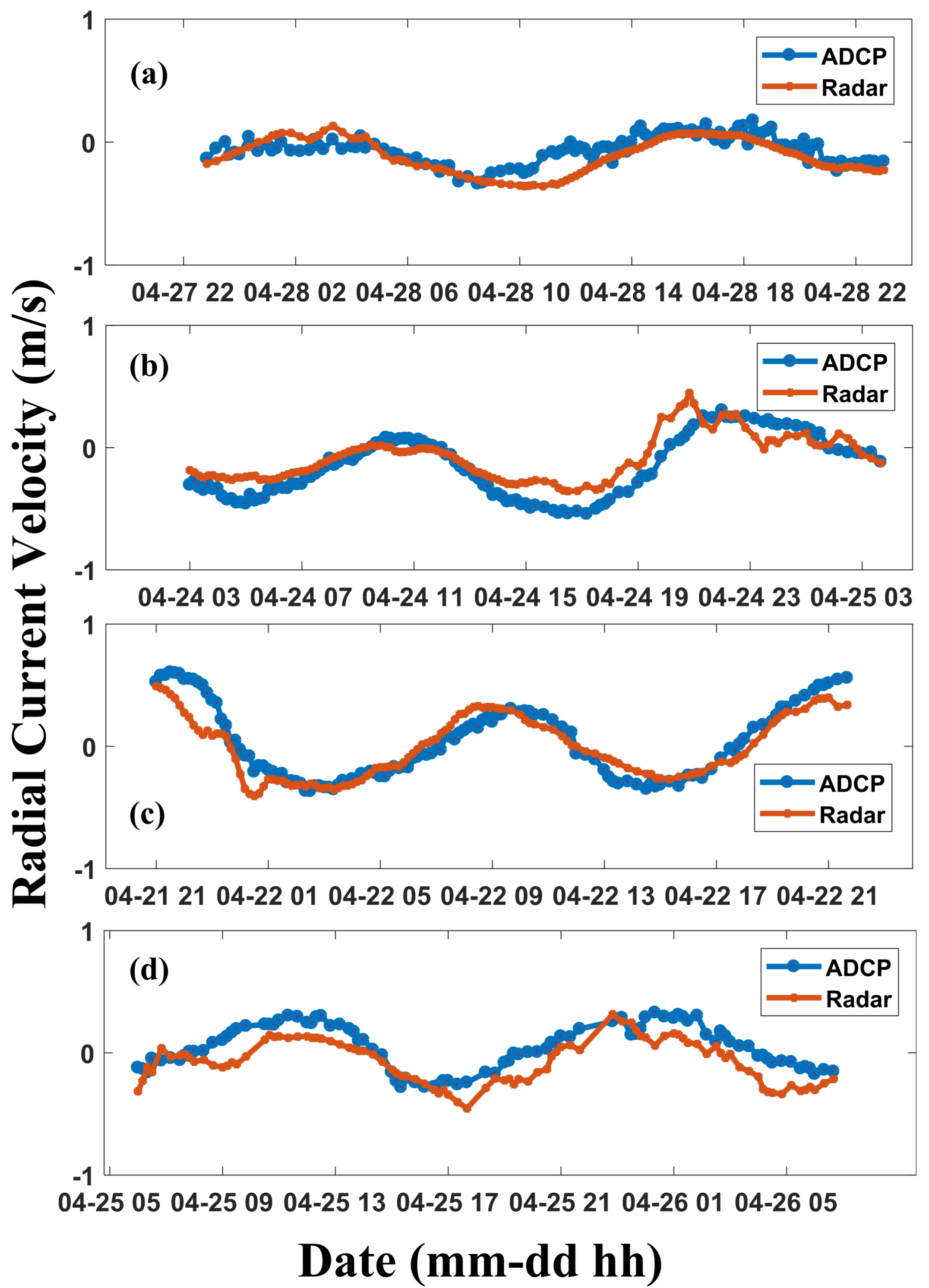
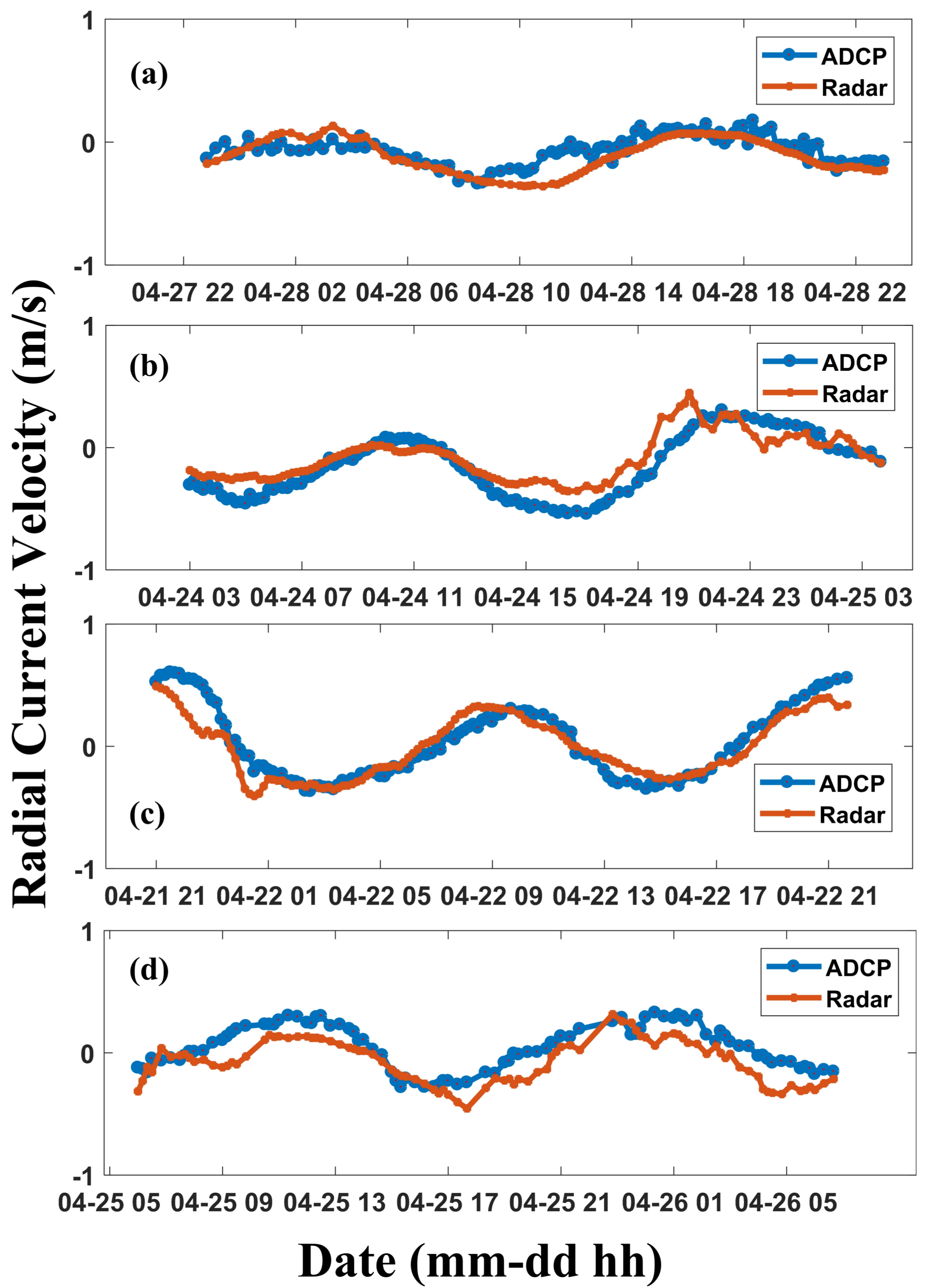
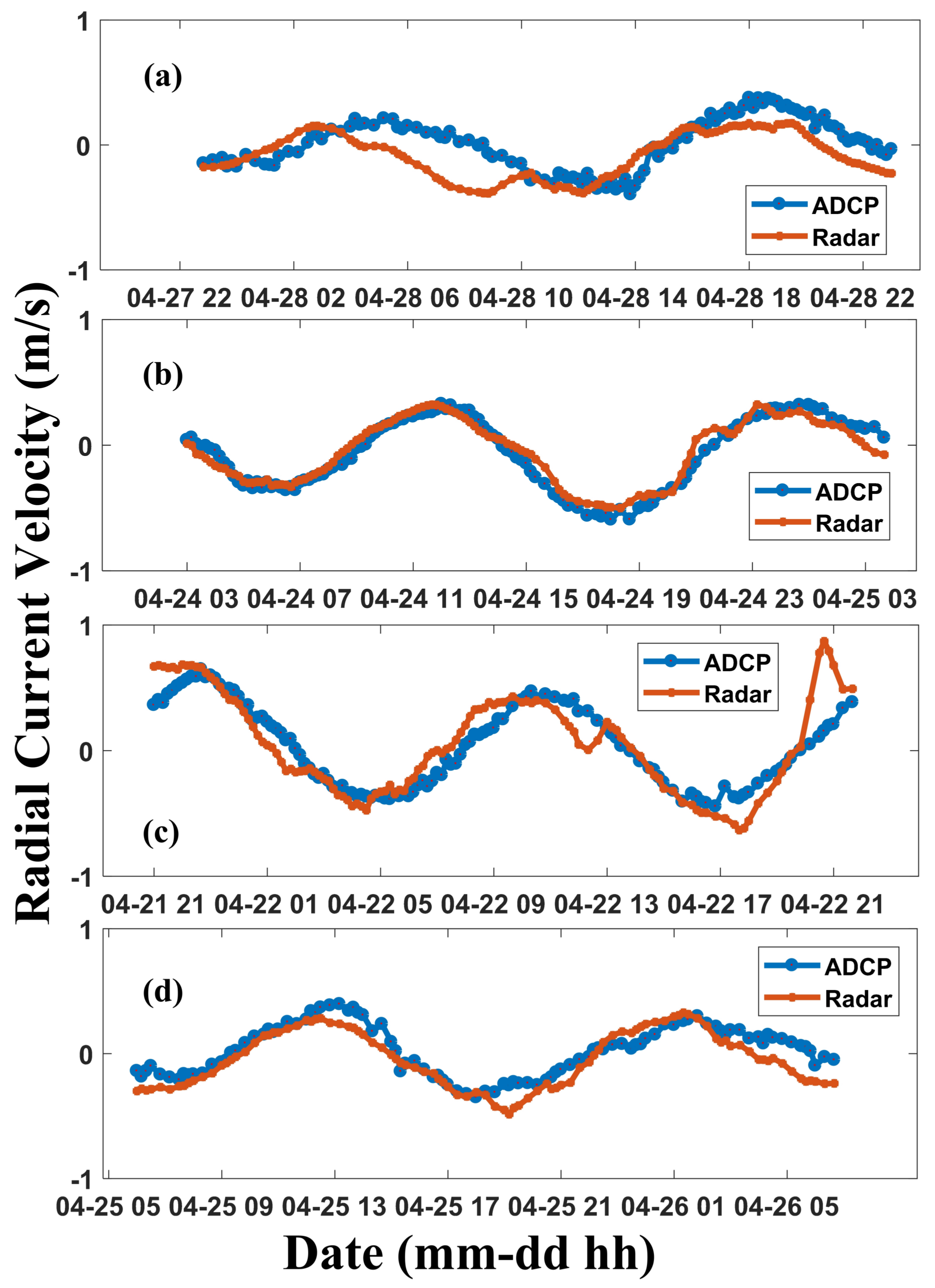
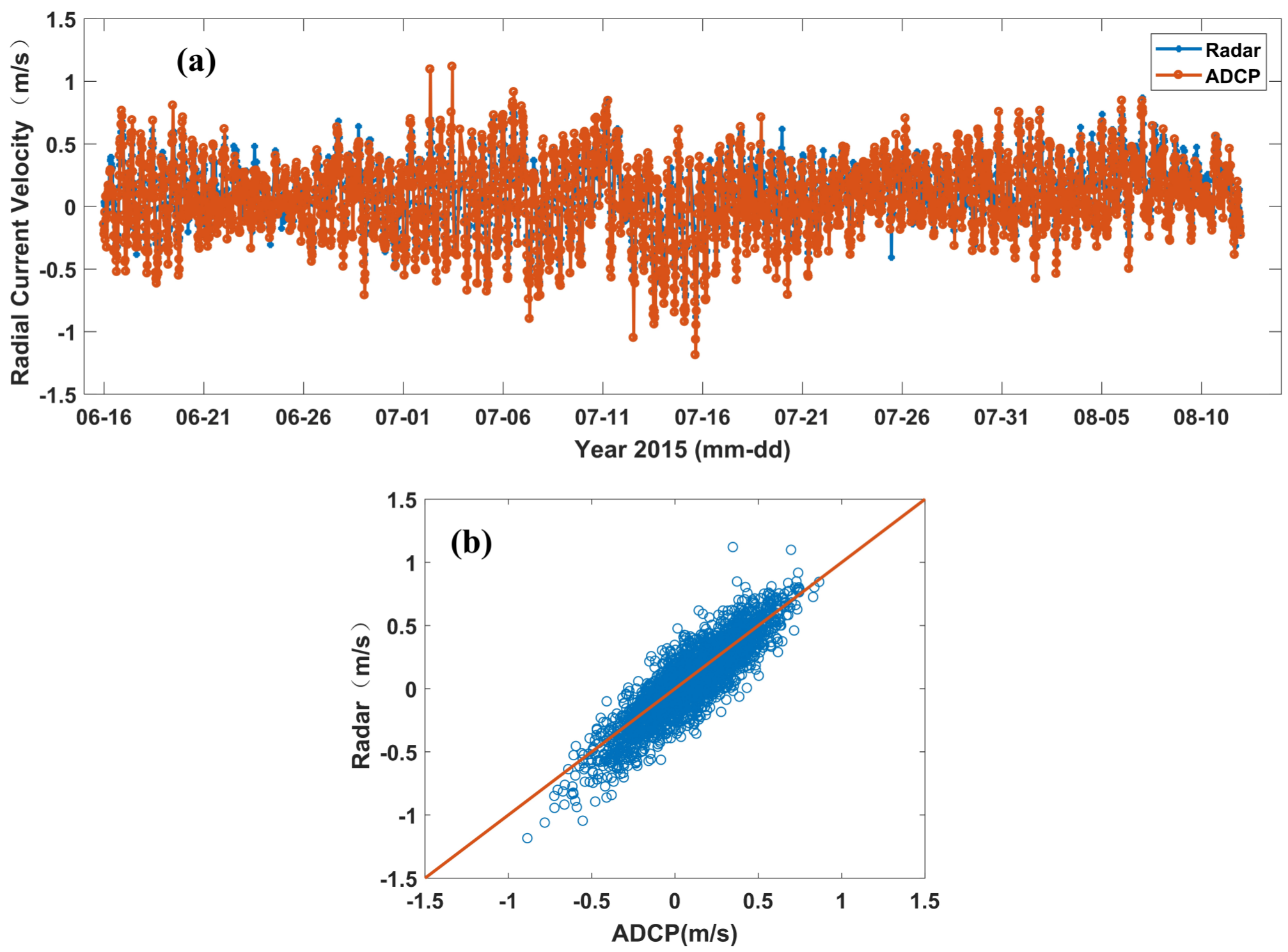
3.4. Comparisons between Radars and ADCPs
4. Discussion
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
Abbreviations
| HF | High Frequency |
| WERA | WEllen RAdar |
| MCR | Multi-frequency Coastal Radar |
| RORSE | Radio Ocean Remote SEnsing |
| MHF | multi-frequency HF |
| DOA | direction of arrival |
| MUSIC | MUltiple SIgnal Characterization |
| FMICW | Frequency Modulated Interrupted Continuous Wave |
| FFT | Fast Fourier Transformation |
| SWR | standing-wave ratio |
| ADCPs | Acoustic Doppler Current Profilers |
| SNR | Signal to Noise Ratio |
| RMS | Root Mean Square |
| CC | correlation coefficient |
| RMSE | root mean square error |
References
- Barrick, D.E. First-Order Theory and Analysis of MF/HF/VHF Scatter from the Sea. IEEE Trans. Antennas Propag. 1972, 20, 2–10. [Google Scholar] [CrossRef]
- Anderson, S.J. Optimizing HF Radar Siting for Surveillance and Remote Sensing in the Strait of Malacca. IEEE Trans. Geosci. Remote Sens. 2013, 51, 1805–1816. [Google Scholar] [CrossRef]
- Kirincich, D.E.; Paolo, T.; Terrill, E. Improving HF Radar Estimates of Surface Currents Using Signal Quality Metrics, with Application to the MVCO High-Resolution Radar System. IEEE Trans. Antennas Propag. 2011, 29, 1377–1390. [Google Scholar] [CrossRef]
- Lipa, B.J.; Barrick, D.E. Least-squares methods for the extraction of surface currents from CODAR crossed-loop data. IEEE J. Ocean. Eng. 1983, 8, 226–253. [Google Scholar] [CrossRef]
- Huang, W.; Wu, S.; Gill, E.W.; Wen, B.; Yang, Z.; Hou, J. HF radar wind and wave measurement over the Eastern China Sea. IEEE Trans. Geosci. Remote Sens. 2002, 40, 1950–1955. [Google Scholar] [CrossRef]
- Wyatt, L.R.; Green, J.J.; Middleditch, A.; Moorhead, M.D.; Howarth, J.; Holt, M.; Keogh, S. Operational Wave, Current, and Wind Measurements With the Pisces HF Radar. IEEE J. Ocean. Eng. 2006, 31, 819–834. [Google Scholar] [CrossRef]
- Liu, Y.G.; Weisberg, R.H.; Merz, C.R. Assessment of CODAR SeaSonde and WERA HF Radars in Mapping Surface Currents on the West Florida Shelf. J. Atmos. Ocean. Technol. 2014, 31, 1363–1382. [Google Scholar] [CrossRef]
- Shay, L.K.; Martinez-Pedraja, J.; Cook, T.M.; Haus, B.K.; Weisberg, R.H. High-Frequency Radar Mapping of Surface Currents Using WERA. J. Atmos. Ocean. Technol. 2007, 24, 484–503. [Google Scholar] [CrossRef]
- Stanev, E.V.; Ziemer, F.; Schulz-Stellenfleth, J.; Seemann, J.; Staneva, J.; Gurgel, K.W. Blending Surface Currents from HF Radar Observations and Numerical Modeling: Tidal Hindcasts and Forecasts. J. Atmos. Ocean. Technol. 2015, 32, 256–281. [Google Scholar] [CrossRef]
- Paduan, J.D.; Washburn, L. High-frequency radar observations of ocean surface currents. Annu. Rev. Mar. Sci. 2013, 5, 115–136. [Google Scholar] [CrossRef] [PubMed]
- Stewart, R.H.; Joy, J.W. HF radio measurements of surface currents. Deep-Sea Res. 1974, 21, 1039–1049. [Google Scholar] [CrossRef]
- Teague, C.C.; Vesecky, J.F.; Hallock, Z.R. A comparison of Multifrequency HF Radar and ADCP Measurements of Near-Surface Currents During COPE-3. IEEE J. Ocean. Eng. 2001, 26, 399–405. [Google Scholar] [CrossRef]
- Chen, Z.; Zhao, C.; Jiang, Y.; Hu, W. Wave Measurements with Multi-Frequency HF radar in the East China Sea. J. Electromagn. Waves Appl. 2011, 25, 1031–1043. [Google Scholar] [CrossRef]
- Paolo, T.D.; Terrill, E. Skill assessment of resolving ocean surface current structure using compact-antenna-style HF radar and the MUSIC direction-finding algorithm. J. Atmos. Ocean. Technol. 2007, 24, 1277–1300. [Google Scholar] [CrossRef]
- Laws, K.E.; Fernandez, D.M.; Paduan, J.D. Simulation based evaluations of HF radar ocean current algorithms. IEEE J. Ocean. Eng. 2000, 25, 481–491. [Google Scholar] [CrossRef]
- Emery, B.M.; Washburn, L.; Harlan, J.A. Evaluating radial current measurements from CODAR high-frequency radars with moored current meters. J. Atmos. Ocean. Technol. 2004, 21, 1259–1271. [Google Scholar] [CrossRef]
- Kohut, J.T.; Roarty, H.J.; Glenn, S.M. Characterizing Observed Environmental Variability With HF Doppler Radar Surface Current Mappers and Acoustic Doppler Current Profilers: Environmental Variability in the Coastal Ocean. IEEE J. Ocean. Eng. 2006, 31, 876–884. [Google Scholar] [CrossRef]
- Lorente, P.; Soto-Navarro, J.; Fanjul, E.A.; Piedracoba, S. Accuracy assessment of high frequency radar current measurements in the Strait of Gibraltar. J. Oper. Oceanogr. 2014, 7, 59–73. [Google Scholar] [CrossRef]
- Robinson, A.M.; Wyatt, L.R.; Howarth, M.J. A two year comparison between HF radar and ADCP current measurements in Liverpool Bay. J. Oper. Oceanogr. 2011, 4, 33–45. [Google Scholar] [CrossRef]
- Cosoli, S.; Bolzon, G. Accuracy of surface current mapping from High-Frequency (HF) ocean radars. Boll. Geofis. Teor. Appl. 2015, 56, 55–70. [Google Scholar]
- Liu, Y.; Weisberg, R.H.; Merz, C.R.; Lichtenwalner, S.; Kirkpatrick, G.J. HF Radar Performance in a Low-Energy Environment: CODAR SeaSonde Experience on the West Florida Shelf. J. Atmos. Ocean. Technol. 2010, 27, 1689–1710. [Google Scholar] [CrossRef]
- Kaplan, D.M.; Largier, J.; Botsford, L.W. HF radar observations of surface circulation off Bodega Bayn (northern California, USA). J. Geophys. Res. 2005, 110, C10020. [Google Scholar] [CrossRef]
- Bellomo, L.; Griffa, A.; Cosoli, S.; Falco, P.; Gerin, R.; Iermano, I.; Kalampokis, A.; Kokkini, Z.; Lana, A.; Magaldi, M.G.; et al. Toward an integrated HF radar network in the Mediterranean Sea to improve search and rescue and oil spill response: The TOSCA project experience. J. Oper. Oceanogr. 2015, 8, 95–107. [Google Scholar] [CrossRef]
- Molcard, A.; Poulain, P.M.; Forget, P.; Griffa, A.; Barbin, Y.; Gaggelli, J.; De Maistre, J.C.; Rixen, M. Comparison between VHF radar observations and data from drifter clusters in the Gulf of La Spezia (Mediterranean Sea). J. Mar. Syst. 2009, 78, S79–S89. [Google Scholar] [CrossRef]
- Kokkini, Z.; Potiris, M.; Kalampokis, A.; Zervakis, V. HF Radar observations of the Dardanelles outflow current in North Eastern Aegean using validated WERA HF radar data. Mediterr. Mar. Sci. 2014, 15, 753–768. [Google Scholar] [CrossRef]
- Kalampokis, A.; Uttieri, M.; Poulain, P.M.; Zambianchi, E. Validation of HF radar-derived currents in the Gulf of Naples with Lagrangian data. IEEE Geosci. Remote Sens. Lett. 2016, 13, 1452–1456. [Google Scholar] [CrossRef]
- Flores-Vidal, X.; Flament, P.; Durazo, R.; Chavanne, C.; Gurgel, K.-W. High-frequency radars: Beamforming calibrations using ships as reflectors. J. Atmos. Ocean. Technol. 2013, 30, 638–648. [Google Scholar] [CrossRef]
- Zhao, C.; Chen, Z.; Jiang, Y.; Fan, L.; Zeng, G. Exploration and Validation of Wave-Height Measurement Using Multifrequency HF Radar. J. Atmos. Ocean. Technol. 2013, 30, 2189–2202. [Google Scholar]
- Zhao, C.; Chen, Z.; Zeng, G.; Zhang, L. A new multi-frequency HF radar system based on small circular antenna array for sea surface current measurement. In Proceedings of the IEEE Oceans Conference, Shanghai, China, 10 April 2016; pp. 1–5. [Google Scholar]
- Zhao, C.; Chen, Z.; Zeng, G.; Zhang, L.; Xie, F. Evaluating Radial Current Measurement of Multi-frequency HF radar with Multi-depth ADCP Data during a small storm. J. Atmos. Ocean. Technol. 2015, 32, 1071–1087. [Google Scholar] [CrossRef]
- Zhao, C.; Chen, Z.; Zeng, G.; Zhang, L. Evaluating Two Array Auto-calibration Methods with Multi-frequency HF Radar Current Measurements. J. Atmos. Ocean. Technol. 2015, 32, 1088–1097. [Google Scholar] [CrossRef]
- Chen, Z.; Zeng, G.; Zhao, C.; Zhang, L. A phase error estimation method for broad beam High-Frequency radar. IEEE Geosci. Remote Sens. Lett. 2015, 12, 1526–1530. [Google Scholar] [CrossRef]
- Paduan, J.D.; Kim, K.C.; Cook, M.S.; Chavez, F.P. Calibration and Validation of Direction-Finding High-Frequency Radar Ocean Surface Current Observations. IEEE J. Ocean. Eng. 2007, 31, 862–875. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Operating frequency range (MHz) | 7.5–25 |
| Number of operating frequencies | ≤4 |
| Transmitter peak power (W) | 300 |
| Maximum detection range (km) | 200 |
| Range cell resolution (km) | 1–5 |
| Doppler sampling cycle (s) | 0.4–0.6 |
| Measurement cycle (min) | 10 |
| Observation Period | Duration | Shengshan Site | Zhujiajian Site | ADCP | ||
|---|---|---|---|---|---|---|
| Frequency (MHz) | Range Resolution (km) | Frequency (MHz) | Range Resolution (km) | |||
| I | 11 March–15 March 2016 | 8.27 and 19.20 | 5 and 1 | 7.88 | 5 | None |
| II | 14 June–30 June 2016 | 8.27 and 19.20 | 5 and 1 | 7.88 | 5 | None |
| III | 16 June–12 August 2015 | 8.27 and 19.20 | 5 and 1 | None | None | Available |
| IV | 21 April–28 April 2015 | 8.27 and 19.20 | 5 and 1 | 7.88 | 5 | Available |
| Point | Shengshan Site | Zhujiajian Site | ||||
|---|---|---|---|---|---|---|
| The Distance to the Point (km) | CC | RMSE (m/s) | The Distance to the Point (km) | CC | RMSE (m/s) | |
| C | 90 | 0.85 | 0.08 | 65 | 0.88 | 0.08 |
| D | 110 | 0.96 | 0.07 | 110 | 0.89 | 0.14 |
| E | 120 | 0.93 | 0.14 | 90 | 0.90 | 0.11 |
| F | 130 | 0.94 | 0.09 | 130 | 0.87 | 0.13 |
| G | 37 | 0.91 | 0.13 | None | None | None |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhao, C.; Chen, Z.; He, C.; Xie, F.; Chen, X.; Mou, C. Validation of Sensing Ocean Surface Currents Using Multi-Frequency HF Radar Based on a Circular Receiving Array. Remote Sens. 2018, 10, 184. https://doi.org/10.3390/rs10020184
Zhao C, Chen Z, He C, Xie F, Chen X, Mou C. Validation of Sensing Ocean Surface Currents Using Multi-Frequency HF Radar Based on a Circular Receiving Array. Remote Sensing. 2018; 10(2):184. https://doi.org/10.3390/rs10020184
Chicago/Turabian StyleZhao, Chen, Zezong Chen, Chao He, Fei Xie, Xi Chen, and Changqing Mou. 2018. "Validation of Sensing Ocean Surface Currents Using Multi-Frequency HF Radar Based on a Circular Receiving Array" Remote Sensing 10, no. 2: 184. https://doi.org/10.3390/rs10020184
APA StyleZhao, C., Chen, Z., He, C., Xie, F., Chen, X., & Mou, C. (2018). Validation of Sensing Ocean Surface Currents Using Multi-Frequency HF Radar Based on a Circular Receiving Array. Remote Sensing, 10(2), 184. https://doi.org/10.3390/rs10020184