A Semi-Empirical SNR Model for Soil Moisture Retrieval Using GNSS SNR Data

Abstract
:1. Introduction
2. Receiver SNR Modeling and Estimation under Noise
3. Semi-Empirical SNR Model: SNR Metrics’ Retrieval
4. Simulations
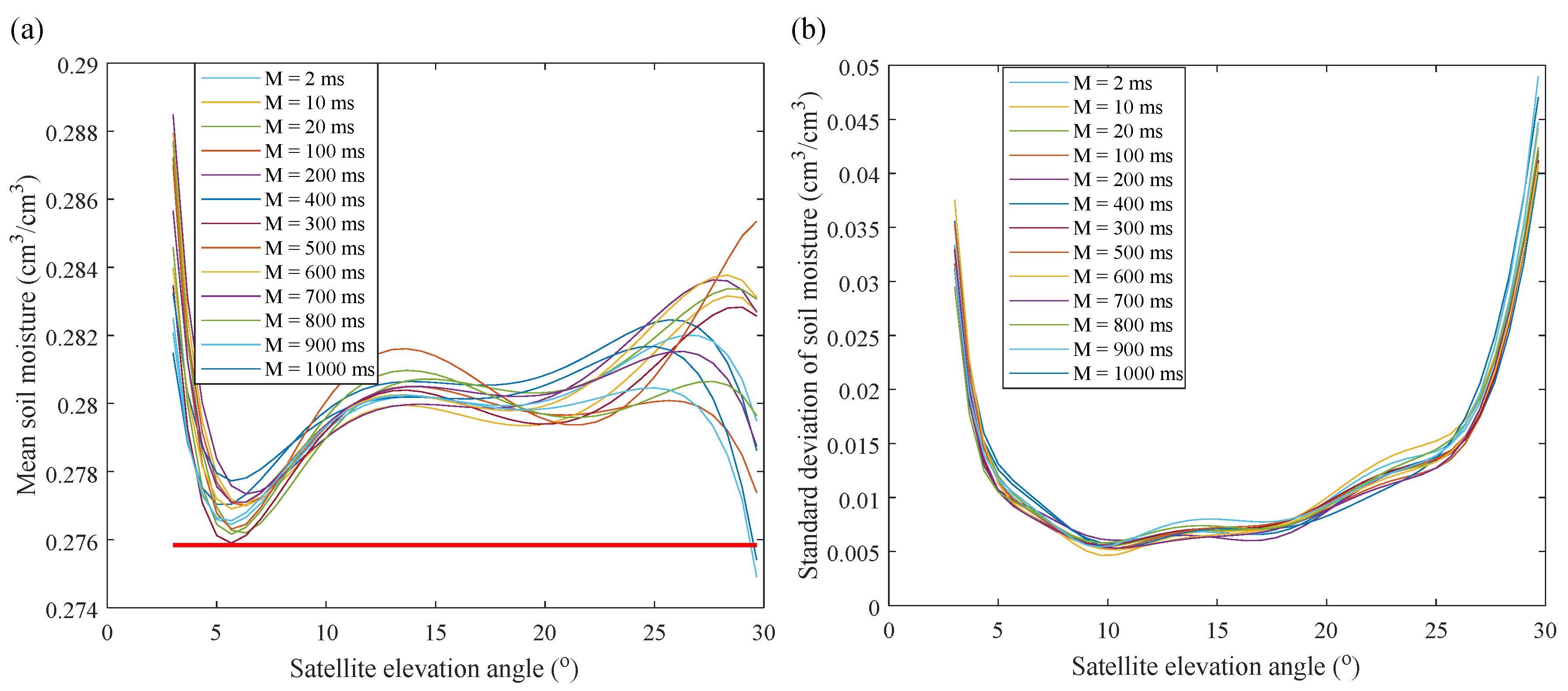
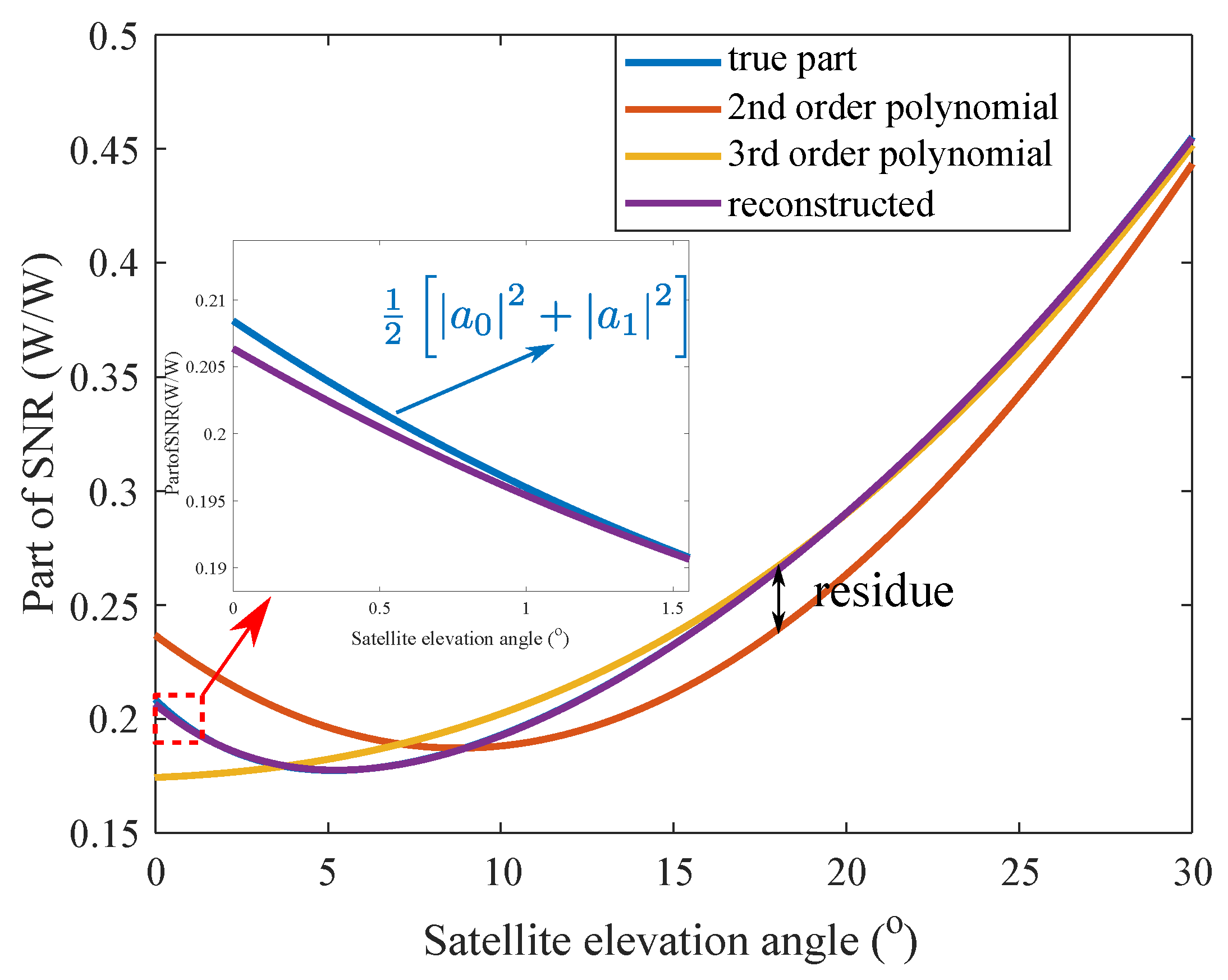
4.1. Simulation Results: Reconstruction and Retrieval
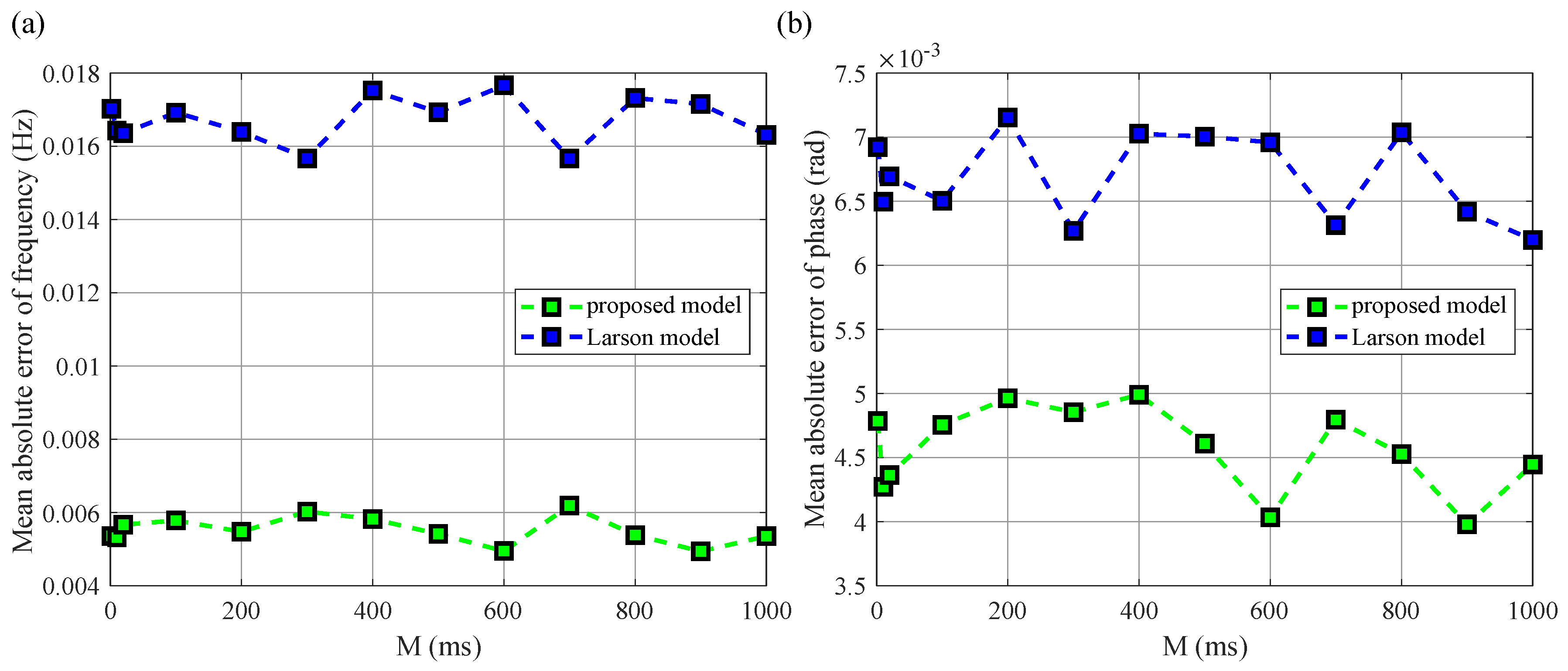
4.2. Simulation Results: Phase and Frequency Estimation
5. Experimental Data Validation
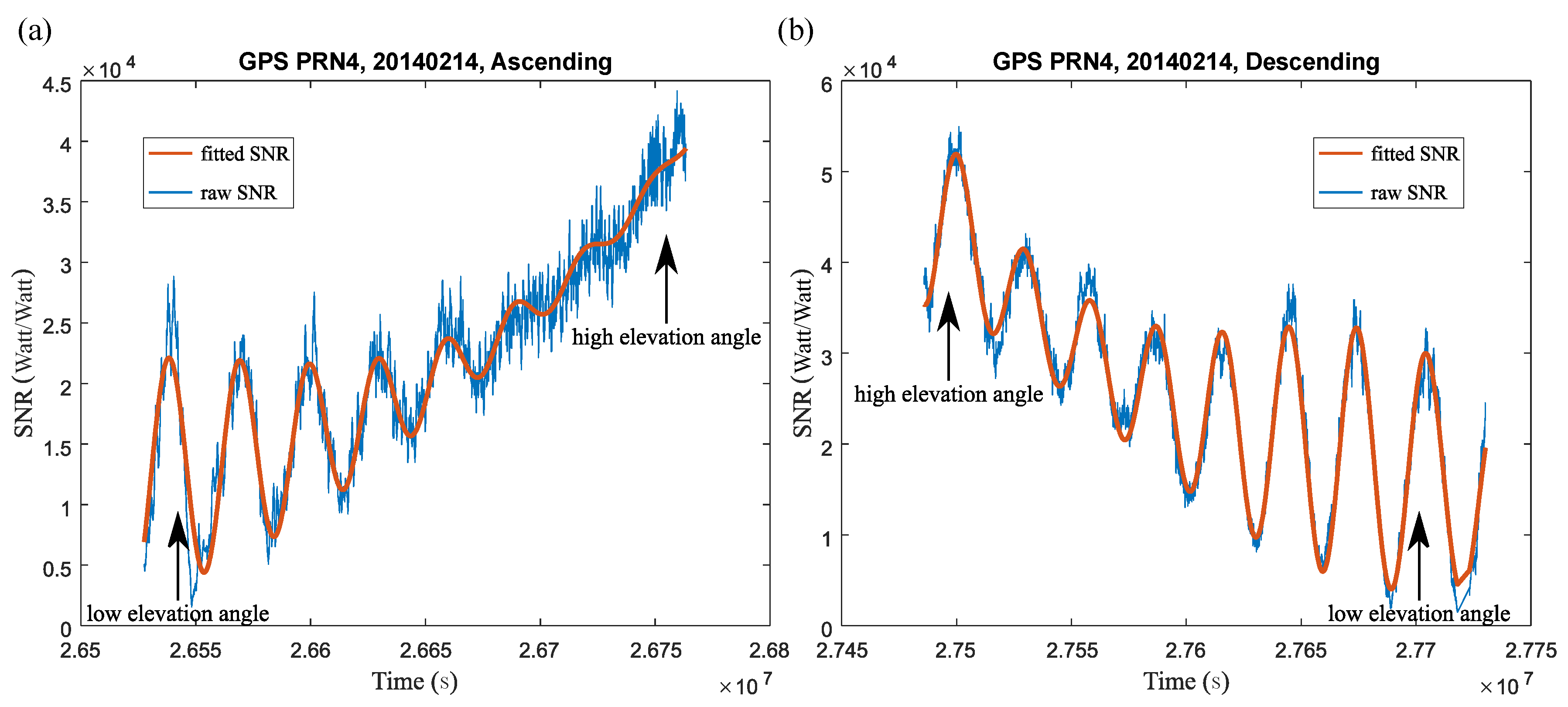
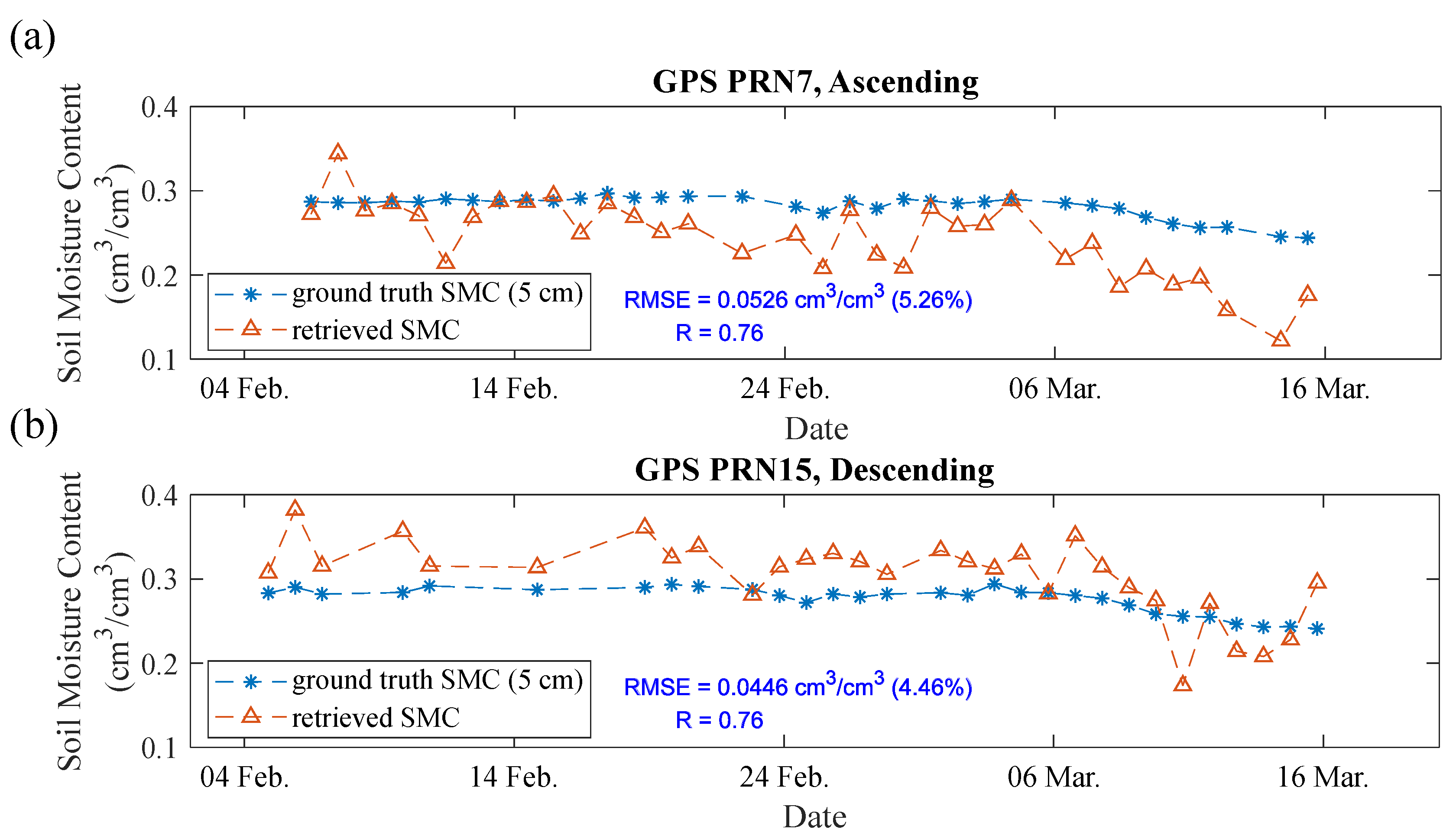
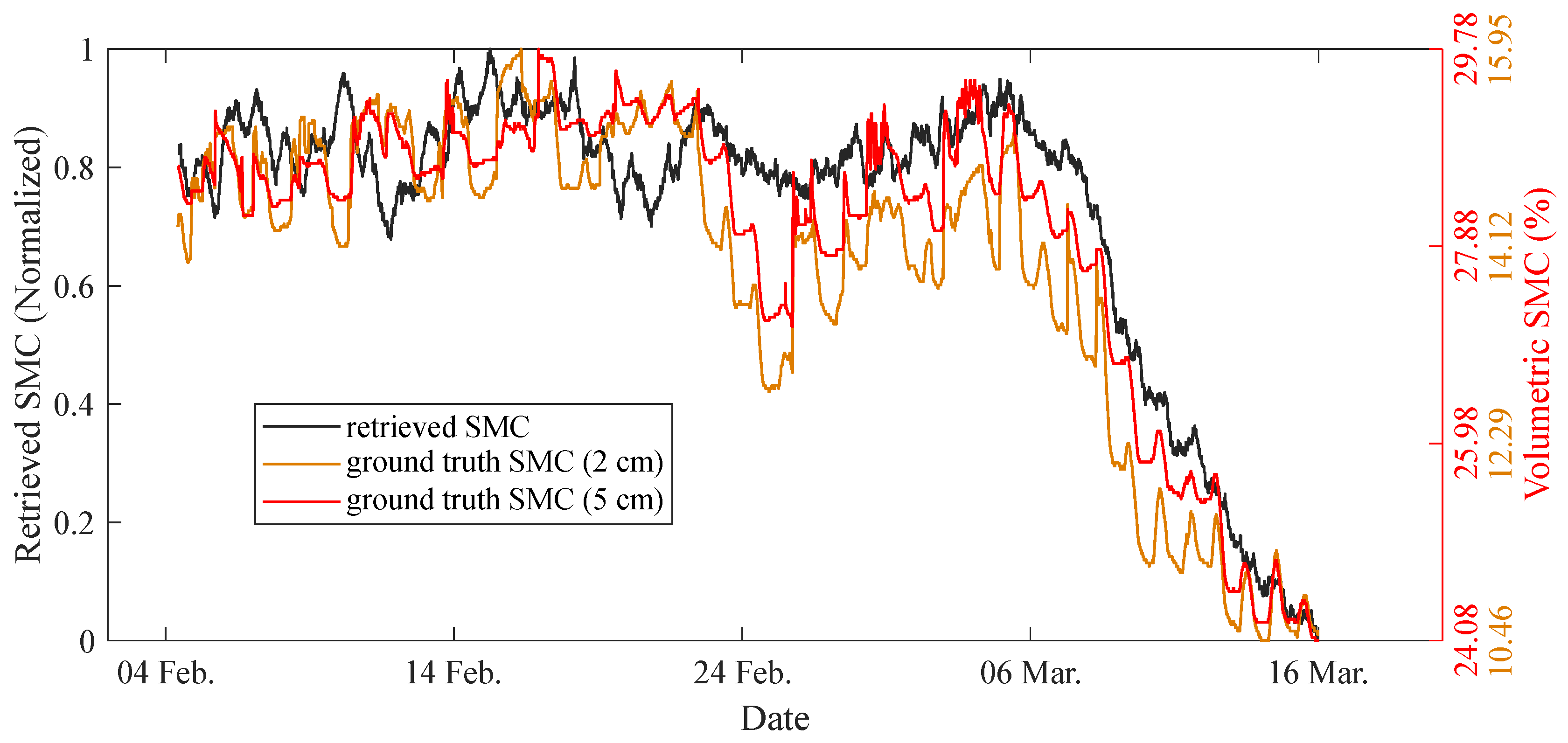
5.1. Soil Moisture Retrieval Using the Reconstructed Signal
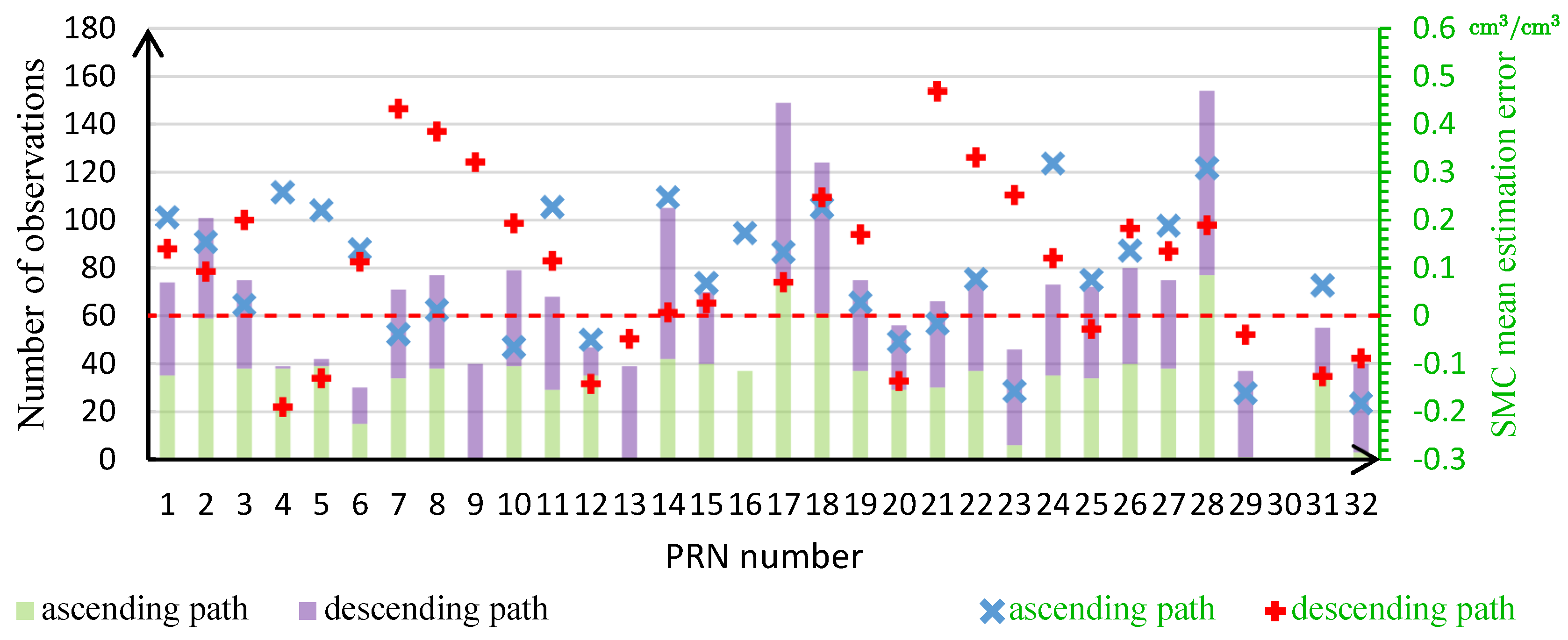
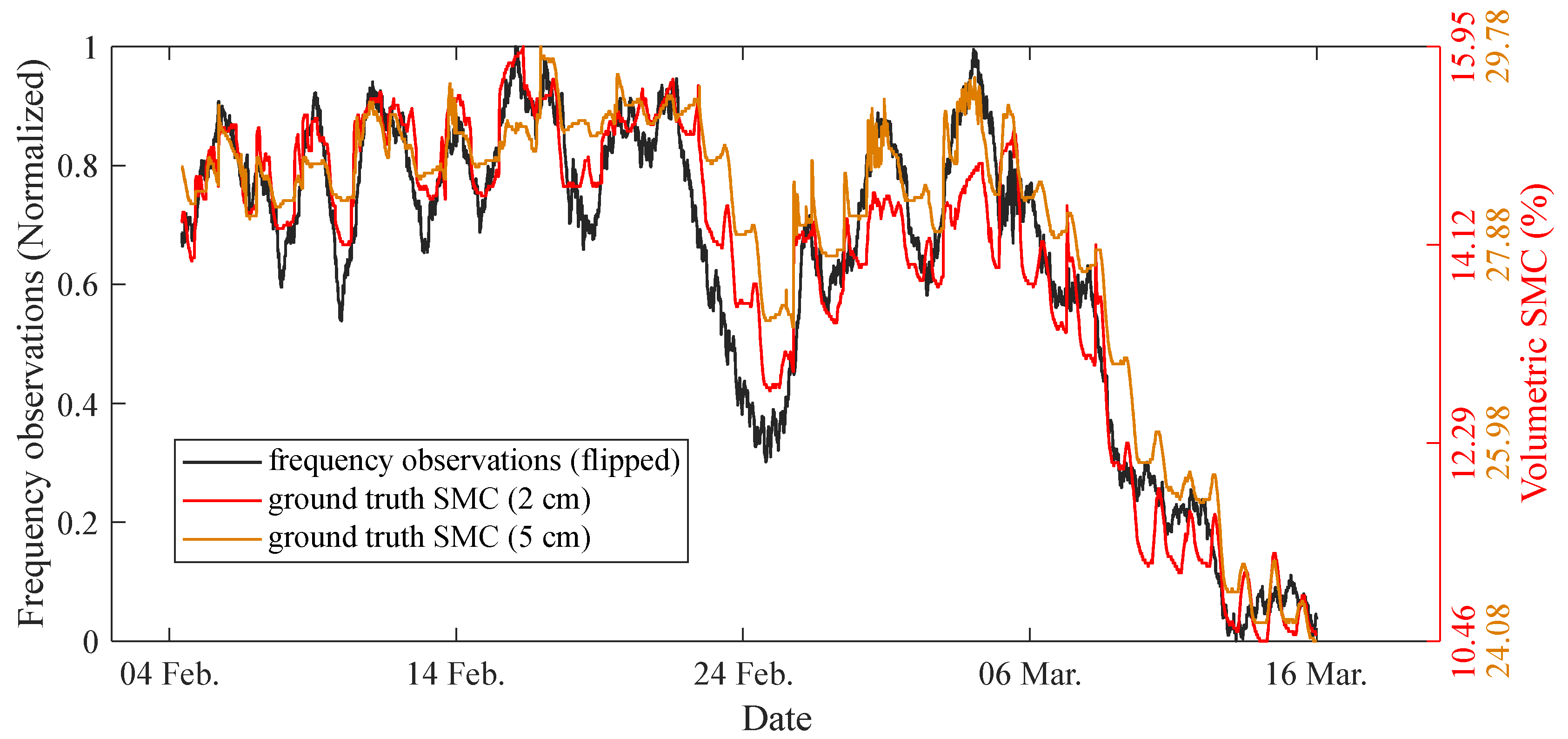
5.2. Correlation between SMC and Frequency/Phase Estimation
6. Discussion
6.1. Choice of Fitting Function
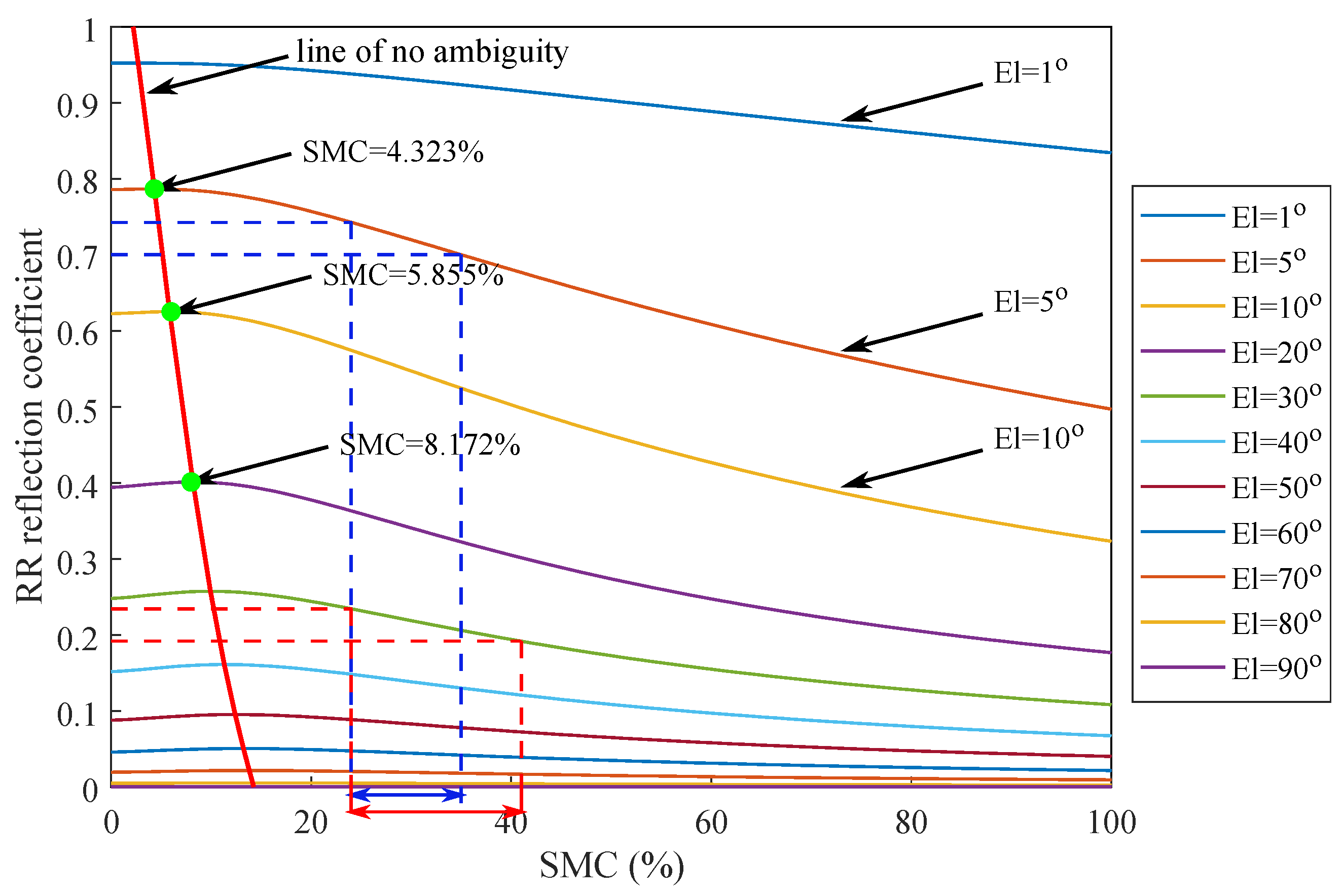
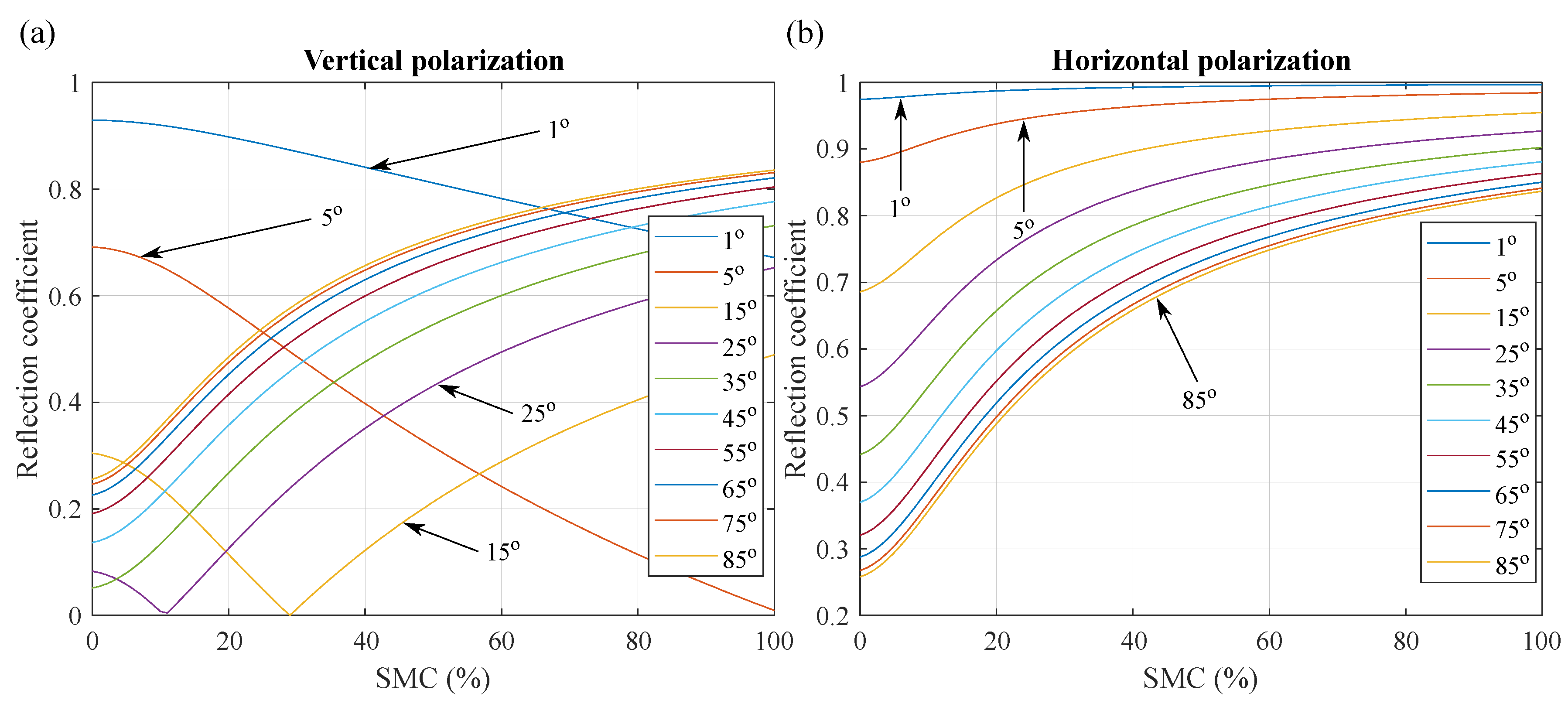
6.2. Retrieval Ambiguity
6.3. Performance Analysis
7. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
Abbreviations
| GNSS | Global Navigation Satellite System |
| GNSS-R | GNSS Reflectometry |
| GNSS-IR | GNSS Interferometry and Reflectometry |
| GPS | Global Positioning System |
| SNR | Signal-to-Noise Ratio |
| IPT | Interference Pattern Technique |
| SMC | Soil Moisture Content |
| QoF | Quality of Fit |
| RMSE | Root-Mean-Square Error |
| ME | Mean Error |
| Probability Density Function | |
| RHCP | Right-Handed Circularly Polarized |
| LHCP | Left-Handed Circularly Polarized |
| V-POL | Vertical-Polarized |
| H-POL | Horizontal-Polarized |
| MLE | Maximum Likelihood Estimate |
| AGC | Automatic Gain Control |
| PRN | Pseudo-Random Noise |
| RF | Radio Frequency |
| LSQ | Least SQuare |
| RR | RHCP to RHCP |
References
- Derksen, C.; Xu, X.; Dunbar, R.S.; Colliander, A.; Kim, Y.; Kimball, J.S.; Black, T.A.; Euskirchen, E.; Langlois, A.; Loranty, M.M.; et al. Retrieving Landscape Freeze/Thaw State from Soil Moisture Active Passive (SMAP) Radar and Radiometer Measurements. Remote Sens. Environ. 2017, 194, 48–62. [Google Scholar] [CrossRef]
- Alonso-Arroyo, A.; Torrecilla, S.; Querol, J.; Camps, A.; Pascual, D.; Park, H.; Onrubia, R. Two Dedicated Soil Moisture Experiments Using the Scatterometric Properties of GNSS-Reflectometry. In Proceedings of the 2015 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Milan, Italy, 26–31 July 2015; pp. 3921–3924. [Google Scholar]
- Katzberg, S.J.; Torres, O.; Grant, M.S.; Masters, D. Utilizing Calibrated GPS Reflected Signals to Estimate Soil Reflectivity and Dielectric Constant: Results from SMEX02. Remote Sens. Environ. 2006, 100, 17–28. [Google Scholar] [CrossRef]
- Sánchez, N.; Alonso-Arroyo, A.; Martínez-Fernández, J.; Piles, M.; González-Zamora, Á.; Camps, A.; Vall-llosera, M. On the Synergy of Airborne GNSS-R and Landsat 8 for Soil Moisture Estimation. Remote Sens. 2015, 7, 9954–9974. [Google Scholar] [CrossRef] [Green Version]
- Carreno-Luengo, H.; Lowe, S.; Zuffada, C.; Esterhuizen, S.; Oveisgharan, S. Spaceborne GNSS-R from the SMAP Mission: First Assessment of Polarimetric Scatterometry over Land and Cryosphere. Remote Sens. 2017, 9, 2072–4292. [Google Scholar] [CrossRef]
- Egido, A.; Caparrini, M.; Ruffini, G.; Paloscia, S.; Santi, E.; Guerriero, L.; Pierdicca, N.; Floury, N. Global Navigation Satellite Systems Reflectometry as a Remote Sensing Tool for Agriculture. Remote Sens. 2012, 4, 2356–2372. [Google Scholar] [CrossRef]
- Ulaby, F.T.; Long, D.G.; Blackwell, W.; Sarabandi, K.; Elachi, C. Microwave Radar and Radiometric Remote Sensing; Artech House: Norwood, MA, USA, 2013. [Google Scholar]
- Larson, K.M.; Small, E.E.; Gutmann, E.; Bilich, A.; Axelrad, P.; Braun, J. Using GPS Multipath to Measure Soil Moisture Fluctuations: Initial Results. GPS Solut. 2008, 12, 173–177. [Google Scholar] [CrossRef]
- Rodriguez Alvarez, N.; Aguasca, A.; Valencia, E.; Bosch, X.; Ramos-Perez, I.; Park, H.; Camps, A.; Vall-llossera, M. Snow Monitoring Using GNSS-R Techniques. In Proceedings of the 2011 International Geoscience and Remote Sensing Symposium (IGARSS), Vancouver, BC, Canada, 24–29 July 2011; pp. 4375–4378. [Google Scholar]
- Roussel, N.; Ramillien, G.; Frappart, F.; Darrozes, J.; Gay, A.; Biancale, R.; Striebig, N.; Hanquiez, V.; Bertin, X.; Allain, D. Sea level Monitoring and Sea State Estimate Using a Single Geodetic Receiver. Remote Sens. Environ. 2015, 171, 261–277. [Google Scholar] [CrossRef]
- Larson, K.M.; Braun, J.J.; Small, E.E.; Zavorotny, V.U.; Gutmann, E.D.; Bilich, A.L. GPS Multipath and Its Relation to Near-Surface Soil Moisture Content. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2010, 3, 91–99. [Google Scholar] [CrossRef]
- Chew, C.; Small, E.E.; Larson, K.M.; Zavorotny, V.U. Effects of Near-Surface Soil Moisture on GPS SNR Data: Development of a Retrieval Algorithm for Soil Moisture. IEEE Trans. Geosci. Remote Sens. 2014, 52, 537–543. [Google Scholar] [CrossRef]
- Chew, C.; Small, E.E.; Larson, K.M. An Algorithm for Soil Moisture Estimation Using GPS-Interferometric Reflectometry for Bare and Vegetated Soil. GPS Solut. 2016, 20, 525–537. [Google Scholar] [CrossRef]
- Rodriguez-Alvarez, N.; Bosch-Lluis, X.; Camps, A.; Vall-Llossera, M.; Valencia, E.; Marchan-Hernandez, J.F.; Ramos-Perez, I. Soil Moisture Retrieval Using GNSS-R Techniques: Experimental Results Over a Bare Soil Field. IEEE Trans. Geosci. Remote Sens. 2009, 47, 3616–3624. [Google Scholar] [CrossRef]
- Arroyo, A.A.; Camps, A.; Monerris, A.; Rüdiger, C.; Walker, J.P.; Forte, G.; Pascual, D.; Park, H.; Onrubia, R. The Dual Polarization GNSS-R Interference Pattern Technique. In Proceedings of the 2014 International Geoscience and Remote Sensing Symposium (IGARSS), Quebec City, QC, Canada, 13–18 July 2014; pp. 3921–3924. [Google Scholar]
- Arroyo, A.A.; Camps, A.; Aguasca, A.; Forte, G.F.; Monerris, A.; Rüdiger, C.; Walker, J.P.; Park, H.; Pascual, D.; Onrubia, R. Dual-Polarization GNSS-R Interference Pattern Technique for Soil Moisture Mapping. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2014, 7, 1533–1544. [Google Scholar] [CrossRef]
- Hallikainen, M.T.; Ulaby, F.T.; Dobson, M.C.; El-rayes, M.A.; Wu, L. Microwave Dielectric Behavior of Wet Soil-Part 1: Empirical Models and Experimental Observations. IEEE Trans. Geosci. Remote Sens. 1985, GE-23, 25–34. [Google Scholar] [CrossRef]
- Wang, J.R.; Schmugge, T.J. An Empirical Model for the Complex Dielectric Permittivity of Soils as a Function of Water Content. IEEE Trans. Geosci. Remote Sens. 1980, GE-18, 288–295. [Google Scholar] [CrossRef]
- Yang, T.; Wan, W.; Chen, X.; Chu, T.; Hong, Y. Using BDS SNR Observations to Measure Near-Surface Soil Moisture Fluctuations: Results From Low Vegetated Surface. IEEE Geosci. Remote Sens. Lett. 2017, 14, 1308–1312. [Google Scholar] [CrossRef]
- Zavorotny, V.U.; Larson, K.M.; Braun, J.J.; Small, E.E.; Gutmann, E.D.; Bilich, A.L. A Physical Model for GPS Multipath Caused by Land Reflections: Toward Bare Soil Moisture Retrievals. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2010, 3, 100–110. [Google Scholar] [CrossRef]
- Roussel, N.; Frappart, F.; Ramillien, G.; Darrozes, J.; Baup, F.; Lestarquit, L.; Ha, M.C. Detection of Soil Moisture Variations Using GPS and GLONASS SNR Data for Elevation Angles Ranging From 2° to 70°. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2016, 9, 4781–4794. [Google Scholar] [CrossRef]
- Kaplan, E.D.; Hegarty, C. Understanding GPS: Principles and Application; Artech House: Norwood, MA, USA, 2005. [Google Scholar]
- Satyanarayana, S.; Borio, D.; Lachapelle, G. C/N0 Estimation: Design Criteria and Reliability Analysis Under Global Navigation Satellite System (GNSS) Weak Signal Scenarios. IET Radar Sonar Navig. 2012, 6, 81–89. [Google Scholar] [CrossRef]
- Roussel, N.; Frappart, F.; Ramillien, G.; Darrozes, J.; Desjardins, C.; Gegout, P.; Pérosanz, F.; Biancale, R. Simulations of Direct and Reflected Wave Trajectories for Ground-Based GNSS-R Experiments. Geosci. Model Dev. 2014, 7, 2261–2279. [Google Scholar] [CrossRef] [Green Version]
- Masters, D.; Axelrad, P.; Katzberg, S. Initial Results of Land-Reflected GPS Bistatic Radar Measurements in SMEX02. Remote Sens. Environ. 2004, 92, 507–520. [Google Scholar] [CrossRef]
- Stutzman, W. Polarization in Electromagnetic Systems; Artech House: Norwood, MA, USA, 1993. [Google Scholar]
- Davies, H. The Reflection of Electromagnetic Waves From a Rough Surface. Proc. IEE Part III Radio Commun. Eng. 1954, 101, 209–214. [Google Scholar] [CrossRef]
- Peng, X.; Wan, W.; Chen, X. Using GPS SNR Data to Estimate Soil Moisture Variations: Proposing a New Interference Model. In Proceedings of the 2016 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Beijing, China, 10–15 July 2016; pp. 4819–4822. [Google Scholar]
- Kraus, J.D.; Marhefka, R.J. Antennas For All Applications; McGraw-Hill: Columbus, OH, USA, 2003. [Google Scholar]
- Mironov, V.L.; Fomin, S.V. Temperature and Mineralogy Dependable Model for Microwave Dielectric Spectra of Moist Soils. Piers Online 2009, 5, 411–415. [Google Scholar] [CrossRef]
- Wigneron, J.P.; Chanzy, A.; Kerr, Y.H.; Lawrence, H.; Shi, J.; Escorihuela, M.J.; Mironov, V.; Mialon, A.; Demontoux, F.; de Rosnay, P.; et al. Evaluating an Improved Parameterization of the Soil Emission in L-MEB. IEEE Trans. Geosci. Remote Sens. 2011, 49, 1177–1189. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | Unit |
|---|---|---|
| Carrier Frequency | 1575.42 | MHz |
| Carrier Signal Power | −160 | dBw |
| Single Sideband Power Spectrum Density | –205.2 | dBw/Hz |
| Front-end Bandwidth B | 2.046 | MHz |
| Antenna Height H | 2 | m |
| Satellite Elevation Angle Changing Rate | 1.16347 × 10 | rad/s |
| Satellite Elevation Angle Range | deg | |
| Volumetric Soil Moisture Content SMC | 0.2785 | |
| Proportion of Sand in Soil S | 18 | % |
| Proportion of Clay in Soil C | 41 | % |
| Polynomial Order , | 2, 4 | |
| Number of Coherent Accumulation M | 2, 10, 20, 100, 200, 300, ⋯, 1000 | ms |
| Number of Simulation Runs | 200 |
| SNR Metrics | Reconstructed Reflection Coefficient | Frequency | Phase | ||
|---|---|---|---|---|---|
| Values | |||||
| Assessment | |||||
| Absolute correlation (2 cm/5 cm) | 0.8824/0.9370 () | 0.9548/0.9463 () | 0.9301/0.9036 () | ||
| Discarded bad data | 22.13% | 4.27% | 5.20% | ||
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Han, M.; Zhu, Y.; Yang, D.; Hong, X.; Song, S. A Semi-Empirical SNR Model for Soil Moisture Retrieval Using GNSS SNR Data. Remote Sens. 2018, 10, 280. https://doi.org/10.3390/rs10020280
Han M, Zhu Y, Yang D, Hong X, Song S. A Semi-Empirical SNR Model for Soil Moisture Retrieval Using GNSS SNR Data. Remote Sensing. 2018; 10(2):280. https://doi.org/10.3390/rs10020280
Chicago/Turabian StyleHan, Mutian, Yunlong Zhu, Dongkai Yang, Xuebao Hong, and Shuhui Song. 2018. "A Semi-Empirical SNR Model for Soil Moisture Retrieval Using GNSS SNR Data" Remote Sensing 10, no. 2: 280. https://doi.org/10.3390/rs10020280
APA StyleHan, M., Zhu, Y., Yang, D., Hong, X., & Song, S. (2018). A Semi-Empirical SNR Model for Soil Moisture Retrieval Using GNSS SNR Data. Remote Sensing, 10(2), 280. https://doi.org/10.3390/rs10020280