Geostationary Visible Imager Calibration for the CERES SYN1deg Edition 4 Product

Abstract
:
1. Introduction
2. Methodology
2.1. Data
2.2. Ray-Matching Calibration Methods
2.2.1. ATO-RM
2.2.2. DCC-RM
2.2.3. GEO Space Count
2.2.4. GEO Gain Temporal Trending
2.2.5. Terra-to-Aqua-MODIS Scaling
2.3. DERM
2.4. DCC-Mode Invariant Target Method
2.5. SBAF
3. Results
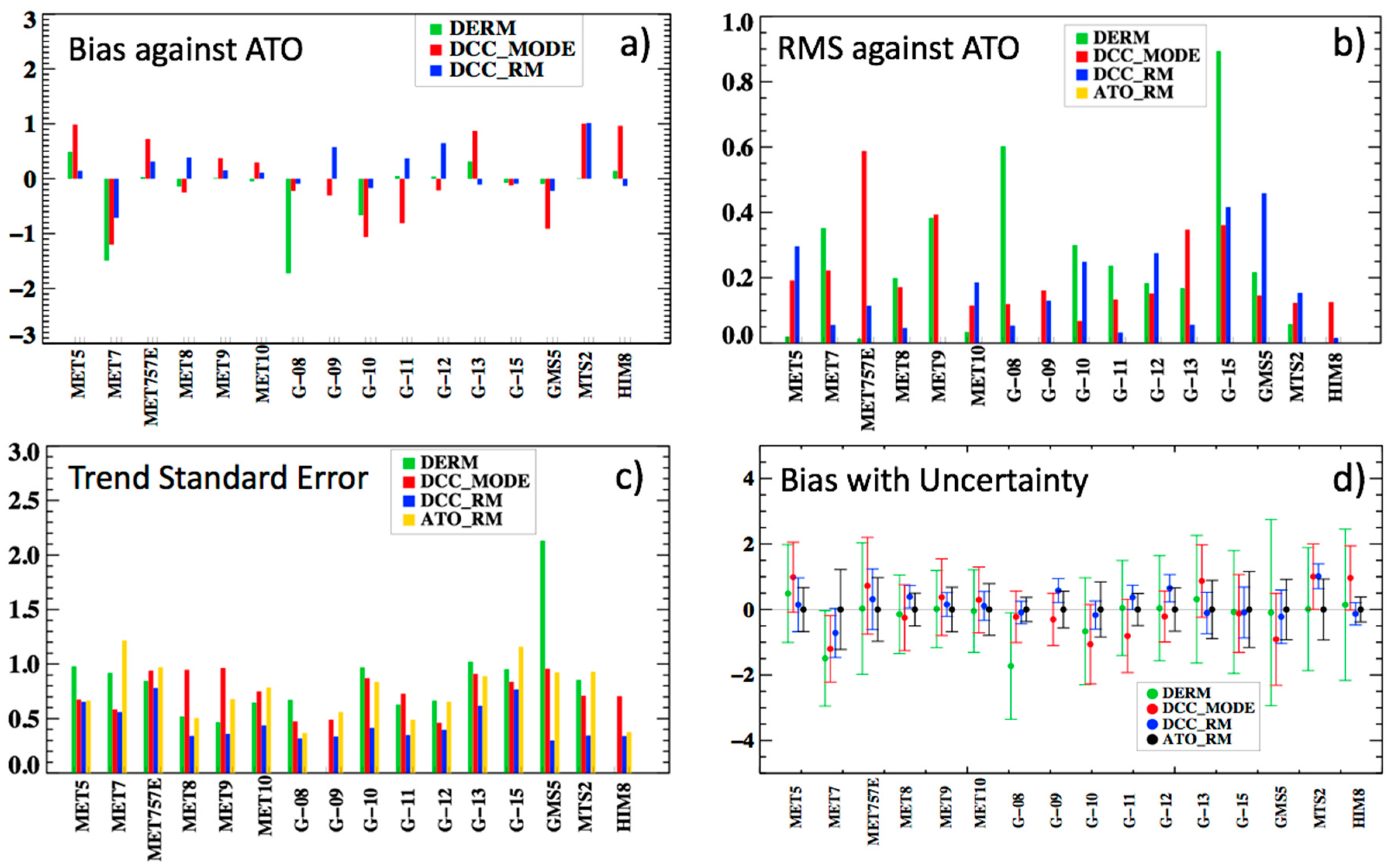
3.1. Calibration Method Monthly Gain Comparisons
3.2. Calibration Method Uncertainties
3.3. Calibration Method Consistency Comparisons
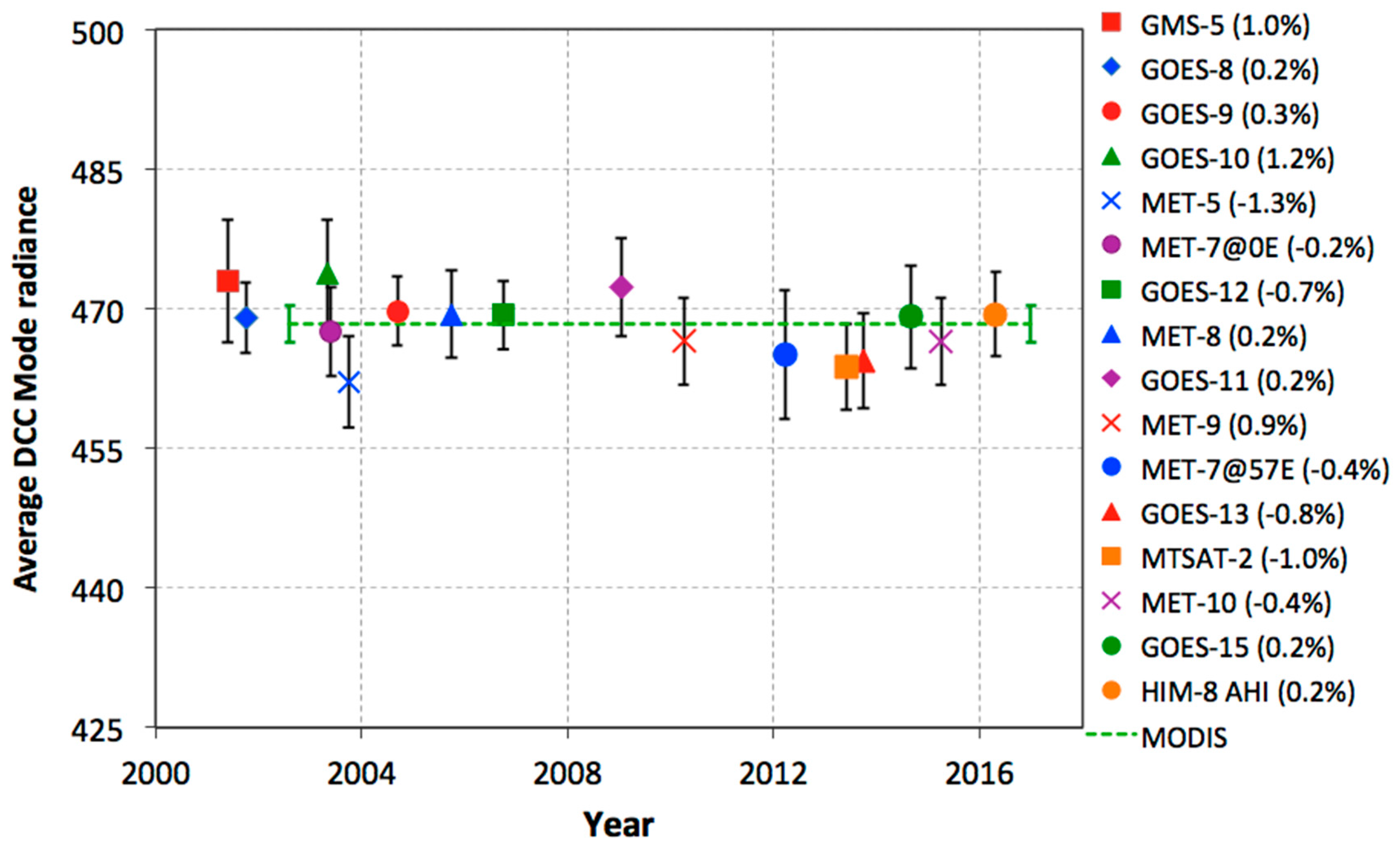
3.4. DCC-Mode Radiance Time Series
4. CERES Ed4A GEO Calibration Tables
5. Discussion
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Wielicki, B.A.; Barkstrom, B.R.; Harrison, E.F.; Lee III, R.B.; Smith, G.L.; Cooper, J.E. Clouds and the Earth’s Radiant Energy System (CERES): An Earth Observing System experiment. Bull. Am. Meteorol. Soc. 1996, 77, 853–868. [Google Scholar] [CrossRef]
- Doelling, D.R.; Loeb, N.G.; Keyes, D.F.; Nordeen, M.L.; Morstad, D.; Nguyen, C.; Wielicki, B.A.; Young, D.F.; Sun, M. Geostationary enhanced temporal interpolation for CERES flux products. J. Atmos. Ocean. Technol. 2013, 30, 1072–1090. [Google Scholar] [CrossRef]
- Rutan, D.; Kato, S.; Doelling, D.; Rose, F.; Nguyen, L.; Caldwell, T.; Loeb, N. CERES synoptic product: Methodology and validation of surface radiant flux. J. Atmos. Ocean. Technol. 2015, 32, 1121–1143. [Google Scholar] [CrossRef]
- Wu, A.; Xiong, X.; Doelling, D.R.; Morstad, D.; Angal, A.; Bhatt, R. Characterization of Terra and Aqua MODIS VIS, NIR, and SWIR spectral bands’ calibration stability. IEEE Trans. Geosci. Remote Sens. 2013, 51, 4330–4338. [Google Scholar] [CrossRef]
- Doelling, D.R.; Wu, A.; Xiong, X.; Scarino, B.R.; Bhatt, R.; Haney, C.O.; Morstad, D.; Gopalan, A. The radiometric stability and scaling of collection 6 Terra- and Aqua-MODIS VIS, NIR, and SWIR spectral bands. IEEE Trans. Geosci. Remote Sens. 2015, 53, 4520–4535. [Google Scholar] [CrossRef]
- Bhatt, R.; Doelling, D.R.; Angal, A.; Xiong, X.; Scarino, B.R.; Gopalan, A.; Haney, C.O.; Wu, A. Characterizing response versus scan-angle for MODIS reflective solar bands using deep convective clouds. J. Appl. Remote Sens. 2017, 11. [Google Scholar] [CrossRef]
- Goldberg, M.; Ohrin, G.; Butler, J.; Cao, C.; Doelling, D.R.; Gaertner, V.; Hewison, T.; Iacovazzi, B.; Kim, D.; Kurino, T.; et al. The Global Space-based Inter-Calibration System (GSICS). Bull. Am. Meteorol. Soc. 2011, 92, 467–475. [Google Scholar] [CrossRef]
- Xiong, X.; Angal, A.; Butler, J.; Cao, C.; Doelling, D.R.; Wu, A.; Wu, X. Global Space-based Inter-Calibration System Reflective Solar Calibration Reference: From Aqua MODIS to S-NPP VIIRS. Proc. SPIE 2016, 9881. [Google Scholar] [CrossRef]
- Xiong, X.; Sun, J.; Xie, X.; Barnes, W.L.; Salomonson, V.V. On-Orbit Calibration and Performance of Aqua MODIS Reflective Solar Bands. IEEE Trans. Geosci. Remote Sens. 2010, 48, 535–546. [Google Scholar] [CrossRef]
- CERES Input Data Sources. Available online: https://ceres.larc.nasa.gov/science_information.php?page=input-data (accessed on 7 November 2017).
- eoPortal Directory, Meteosoat First Generation. Available online: https://directory.eoportal.org/web/eoportal/satellite-missions/m/meteosat-first-generation (accessed on 7 November 2017).
- Schmetz, J.; Pili, P.; Tjemkes, D.J.; Kerkman, J.; Rota, S.; Ratier, A. An Introduction to Meteosat Second Generation (MSG). Bull. Am. Meteorol. Soc. 2002, 83, 977–992. [Google Scholar] [CrossRef]
- Tokuno, M.; Itaya, H.; Tsuchiya, K.; Kurihara, S. Calibration of VISSR On Board GMS-5. Adv. Space Res. 1997, 19, 1297–1306. [Google Scholar] [CrossRef]
- Puschell, J.J.; Lowe, H.A.; Jeter, J.W.; Kus, S.M.; Osgood, R.; Hurt, T.; Gilman, D.L.; Hoelter, R.L.; Kamel, A. Design and characterization of the Japanese Advanced Meteorological Imager (JAMI). Proc. SPIE 2003, 5157, 58–74. [Google Scholar]
- Bessho, K.; Date, K.; Hayashi, M.; Takahito, I.; Hidekazu, I.; Yukihiro, Y.; Takuya, M.; Hidehiko, M.; Yoshida, R.; Ikeda, A.; et al. An Introduction to Himawari-8/9—Japan’s New-Generation Geostationary Meteorological Satellites. J. Meteorol. Soc. Jpn. 2016, 94, 151–183. [Google Scholar] [CrossRef]
- Menzel, P.M.; Purdom, J.F.W. Introducing GOES-I: The First of a New Generation of Geostationary Operational Environmental Satellites. Bull. Am. Meteorol. Soc. 1994, 75, 757–781. [Google Scholar] [CrossRef]
- Hewison, T.J.; Wu, X.; Yu, F.; Tahara, Y.; Hu, X.; Kim, D.; Koenig, M. GSICS Inter-Calibration of Infrared Channels of Geostationary Imagers Using Metop/IASI. IEEE Trans. Geosci. Remote Sens. 2013, 51, 1160–1170. [Google Scholar] [CrossRef]
- EUMETSAT Central Operations Reports (Look for Decontamination Events). Available online: https://www.eumetsat.int/website/home/Data/ServiceStatus/CentralOperationsReports/index.html (accessed on 7 November 2017).
- Japan Meteorological Agency (JMA) Satellite Status Page. Available online: http://www.data.jma.go.jp/mscweb/en/operation8/status/status.html (accessed on 7 November 2017).
- Japan Meteorological Agency (JMA). MTSAT Operational Information. Available online: http://www.data.jma.go.jp/mscweb/en/operation/index.html (accessed on 7 November 2017).
- GOES-N Status: GOES-13 Imager and Sounder Anomaly in September 2012. Available online: https://goes.gsfc.nasa.gov/text/goesnstatus.html (accessed on 7 November 2017).
- GOES-N Status: GOES-13 Attitude Anomaly in May 2013. Available online: https://goes.gsfc.nasa.gov/text/goesnstatus.html (accessed on 7 November 2017).
- Khlopenkov, K.V.; Doelling, D.R. Development of Image Processing Method to Detect Noise in Geostationary Imagery. Proc. SPIE 2016, 10004. [Google Scholar] [CrossRef]
- Minnis, P.; Smith, W.L., Jr.; Garber, D.P.; Ayers, J.K.; Doelling, D.R. Cloud Properties Derived from GOES-7 for Spring 1994 ARM Intensive Observing Period Using Version 1.0.0 of ARM Satellite Data Analysis Program; NASA RP-1366; National Aeronautics and Space Administration, Langley Research Center: Hampton, VA, USA, 1994; 59p.
- Lazzara, M.A.; Benson, J.M.; Fox, R.J.; Laitsch, D.J.; Rueden, J.P.; Santek, D.A.; Wade, D.M.; Whittaker, T.M.; Young, J.T. The Man computer Interactive Data Access System: 25 years of interactive processing. Bull. Am. Meteorol. Soc. 1999, 80, 271–284. [Google Scholar] [CrossRef]
- Minnis, P.; Nguyen, L.; Doelling, D.R.; Young, D.F.; Miller, W.F.; Kratz, D.P. Rapid calibration of operational and research meteorological satellite imagers, Part I: Evaluation of research satellite visible channels as references. J. Atmos. Ocean. Technol. 2002, 19, 1233–1249. [Google Scholar] [CrossRef]
- Doelling, D.R.; Bhatt, R.; Morstad, D.; Scarino, B.R. Algorithm Theoretical Basis Document (ATBD) for Ray-Matching Technique of Calibrating GEO Sensors with Aqua-MODIS for GSICS, GSICS ATBDs. 2011. Available online: https://gsics.nesdis.noaa.gov/pub/Development/AtbdCentral/GSICS_ATBD_RayMatch_NASA_2011_09.pdf (accessed on 6 November 2017).
- Wielicki, B.A.; Doelling, D.R.; Young, D.F.; Loeb, N.G.; Garber, D.P.; MacDonnell, D.G. Climate quality broadband and narrowband solar reflected radiance calibration between sensors in orbit. In Proceedings of the IGARSS 2008 IEEE International Geoscience and Remote Sensing Symposium, Boston, MA, USA, 7–11 July 2008. [Google Scholar] [CrossRef]
- Doelling, D.R.; Haney, C.O.; Scarino, B.R.; Gopalan, A.; Bhatt, R. Improvements to the geostationary visible imager ray-matching calibration algorithm for CERES Edition 4. J. Atmos. Ocean. Technol. 2016, 33, 2679–2698. [Google Scholar] [CrossRef]
- Vermote, E.; Kaufman, Y.J. Absolute calibration of AVHRR visible and near-infrared channels using ocean and cloud views. Int. J. Remote Sens. 1995, 16, 2317–2340. [Google Scholar] [CrossRef]
- Henry, P.; Meygret, A. Calibration of HRVIR and Vegetation cameras on SPOT4. Adv. Space Res. 2002, 28, 49–58. [Google Scholar] [CrossRef]
- Fougnie, B.; Bach, R. Monitoring of radiometric sensitivity changes of space sensors using deep convective clouds: Operational application to PARASOL. IEEE Trans. Geosci. Remote Sens. 2009, 47, 851–861. [Google Scholar] [CrossRef]
- Hong, G.; Heygster, G.; Notholt, J.; Buehler, S.A. Interannual to diurnal variations in tropical and subtropical deep convective clouds and convective overshooting from seven years of AMSU-B measurements. J. Clim. 2008, 21, 4168–4189. [Google Scholar] [CrossRef]
- Ignatov, A.; Cao, C.; Sullivan, J.; Levin, R.; Wu, X.; Galvin, R. The usefulness of in-flight measurements of space count to improve calibration of the AVHRR solar reflectance bands. J. Atmos. Ocean. Technol. 2005, 22, 180–200. [Google Scholar] [CrossRef]
- Hillger, D.W.; Schmidt, T.J. The GOES-14 Science Test: Imager and Sounder Radiance and Product Validations; NOAA Technical Report NESDIS 131; National Oceanic and Atmospheric Administration: Washington, DC, USA, 2010. Available online: http://rammb.cira.colostate.edu/projects/goes-o/NOAA_Tech_Report_NESDIS_131_GOES14_Science_Test_with_Corrigendum.pdf (accessed on 7 November 2017).
- Weinreb, M.; Jamieson, M.; Fulton, N.; Chen, Y.; Johnson, J.-X.; Bremer, J.; Smith, C.; Baucom, J. Operational calibration of Geostationary Operational Environmental Satellite-8 and -9 imagers and sounders. Appl. Opt. 1997, 36, 6895–6904. [Google Scholar] [CrossRef] [PubMed]
- Govaerts, Y.M.; Clerici, M. MSG-1/SEVIRI Solar Channels Calibration Commissioning Activity Report; EUMETSAT Rep. EUM/MSG/TEN/04/0024; EUMETSAT: Darmstadt, Germany, 2004; Volume 1, 35p, Available online: http://www.eumetsat.int/website/wcm/idc/idcplg?IdcService5GET_FILE&dDocName5PDF_TEN_040024_SEVIRI-SOLCALIB&RevisionSelectionMethod5LatestReleased&Rendition5Web (accessed on 7 November 2017).
- Doelling, D.R.; Khlopenkov, K.V.; Okuyama, A.; Haney, C.O.; Gopalan, A.; Scarino, B.R.; Nordeen, M.; Bhatt, R.; Avey, L. MTSAT-1R visible imager point spread function correction, Part I: The need for, validation of, and calibration with. IEEE Trans. Geosci. Remote Sens. 2015, 53, 1513–1526. [Google Scholar] [CrossRef]
- Bhatt, R.; Doelling, D.R.; Morstad, D.; Scarino, B.R.; Gopalan, A. Desert-based absolute calibration of successive geostationary visible sensors using a daily exoatmospheric radiance model. IEEE Trans. Geosci. Remote Sens. 2014, 52, 3670–3682. [Google Scholar] [CrossRef]
- Doelling, D.R.; Morstad, D.L.; Scarino, B.R.; Bhatt, R.; Gopalan, A. The characterization of deep convective clouds as an invariant calibration target and as a visible calibration technique. IEEE Trans. Geosci. Remote Sens. 2013, 51, 1245–1254. [Google Scholar] [CrossRef]
- Doelling, D.R.; Morstad, D.L.; Bhatt, R.; Scarino, B. Algorithm Theoretical Basis Document (ATBD) for Deep Convective Cloud (DCC) Technique of Calibrating GEO Sensors with Aqua-MODIS for GSICS, GSICS. 2011. Available online: http://gsics.atmos.umd.edu/pub/Development/AtbdCentral/GSICS_ATBD_DCC_NASA_2011_09.pdf (accessed on 6 November 2017).
- Hu, Y.B.; Wielicki, B.A.; Yang, P.; Stackhouse, P.W., Jr.; Lin, B.; Young, D.F. Application of deep convective cloud albedo observation to satellite-based study of the terrestrial atmosphere: Monitoring the stability of spaceborne measurements and assessing absorption anomaly. IEEE Trans. Geosci. Remote Sens. 2004, 42, 2594–2599. [Google Scholar]
- Chander, G.; Mishra, N.; Helder, D.L.; Aaron, D.B.; Angal, A.; Choi, T.; Xiong, X.; Doelling, D.R. Applications of spectral band adjustment factors (SBAF) for cross-calibration. IEEE Trans. Geosci. Remote Sens. 2013, 51, 1267–1281. [Google Scholar] [CrossRef]
- GSICS Spectral Response Functions. Available online: https://www.star.nesdis.noaa.gov/smcd/GCC/instrInfo-srf.php (accessed on 7 November 2017).
- ISCCP Spectral Response Functions. Available online: https://isccp.giss.nasa.gov/docs/response.html (accessed on 7 November 2017).
- Govaerts, Y.M. Correction of the Meteosat-5 and -6 radiometer solar channel spectral response with the Meteosat-7 sensor spectral characteristics. Int. J. Remote Sens. 1999, 20, 3677–3682. [Google Scholar] [CrossRef]
- Govaerts, Y.M.; Clerici, M.; Clerbaux, N. Operational Calibration of the Meteosat Radiometer VIS Band. IEEE Trans. Geosci. Remote Sens. 2004, 42, 1900–1914. [Google Scholar] [CrossRef]
- Meteosat MFG Calibration Web Page. Available online: https://www.eumetsat.int/website/home/Data/Products/Calibration/MFGCalibration/index.html (accessed on 7 November 2017).
- Skupin, J.; Noël, S.; Wuttke, M.W.; Gottwald, M.; Bovensmann, H.; Weber, M.; Burrows, J.P. SCIAMACHY solar irradiance observation in the spectral range from 240 to 2380 nm. Adv. Space Res. 2005, 35, 370–375. [Google Scholar] [CrossRef]
- NASA-Langley SCIAMACHY SBAF Tool. Available online: https://satcorps.larc.nasa.gov/SBAF (accessed on 7 November 2017).
- Scarino, B.R.; Doelling, D.R.; Morstad, D.L.; Bhatt, R.; Gopalan, A.; Lukashin, C.; Minnis, P. Using SCIAMACHY to improve corrections for spectral band differences when transferring calibration between visible sensors. Proc. SPIE 2012, 8510. [Google Scholar] [CrossRef]
- Scarino, B.R.; Doelling, D.R.; Minnis, P.; Gopalan, A.; Chee, T.; Bhatt, R.; Lukashin, C.; Haney, C.O. A web-based tool for calculating spectral band difference adjustment factors derived from SCIAMACHY hyperspectral data. IEEE Trans. Geosci. Remote Sens. 2016, 54, 2529–2542. [Google Scholar] [CrossRef]
- Angal, A.; Xiong, X.; Choi, T.; Chander, G.; Wu, A. Using the Sonoran and Libyan Desert test sites to monitor the temporal stability of reflective solar bands for Landsat 7 enhanced thematic mapper plus and Terra moderate resolution imaging spectroradiometer sensors. J. Appl. Remote Sens. 2010, 4. [Google Scholar] [CrossRef]
- CERES Edition 4 GEO Calibration Web Page. Available online: https://satcorps.larc.nasa.gov/cgi-bin/site/showdoc?mnemonic=CALIB-ED4 (accessed on 7 November 2017).
- Xiong, X. MODIS Reflective Solar Calibration and Uncertainty Assessment. Available online: http://gsics.atmos.umd.edu/pub/Development/20110322/Day2pm_GRWG_Xiong_MODIS.pdf (accessed on 7 November 2017).
- Mu, Q.; Wu, A.; Xiong, X.; Doelling, D.R.; Angal, A.; Chang, T.; Bhatt, R. Optimization of a Deep Convective Cloud Technique in Evaluating the Long-Term Radiometric Stability of MODIS Reflective Solar Bands. Remote Sens. 2017, 9, 535. [Google Scholar] [CrossRef]
- Snel, R. In-orbit optical path degradation: GOME experience and SCIAMACHY prediction. In Proceedings of the ERS-Envisat Symposium SP-461, Gothenburg, Sweden, 16–20 October 2000; Available online: http://citeseerx.ist.psu.edu/viewdoc/download?doi=10.1.1.20.5703&rep=rep1&type=pdf (accessed on 7 November 2017).
- Matthews, G.; Priestley, K.; Spence, P.; Cooper, D.; Walikainen, D. Compensation for spectral darkening of short wave optics occurring on the cloud’s and the Earth’s radiant energy system. Proc. SPIE 2005, 5882. [Google Scholar] [CrossRef]
- Chen, X.; Wu, A.; Xiong, X.; Lei, N.; Wang, Z.; Chiang, K. Using Ground Targets to Validate S-NPP VIIRS Day-Night Band Calibration. Remote Sens. 2016, 8, 984. [Google Scholar] [CrossRef]
- Decoster, I.; Clerbaux, N.; Govaerts, Y.M.; Baudrez, E.; Ipe, A.; Dewitte, S.; Nevens, S.; Velazquez Blazquez, A.; Cornelis, J. Evidence of pre-launch characterization problem of Meteosat-7 visible spectral response. Remote Sens. Lett. 2013, 4, 1008–1017. [Google Scholar] [CrossRef]
- Decoster, I.; Clerbaux, N.; Buadrez, E.; Dewitte, S.; Ipe, A.; Nevens, S.; Velazquez Blazquez, A.; Cornelis, J. A Spectral Aging Model for the Meteosat-7 Visible Band. J. Atmos. Ocean. Technol. 2013, 30, 496–509. [Google Scholar] [CrossRef]
- Govaerts, Y.M.; Quast, R.; Ruethrich, F.; Giering, R.; Roebeling, R. Recovery of MVIRI/VIS Band Spectral Response. In Proceedings of the 2016 EUMETSAT Meteorological Satellite Conference, Darmstadt, Germany, 26–30 September 2016; Available online: http://www.rayference.eu/1/publications/GOVAERTS_2016_EMSC16.pdf (accessed on 7 November 2017).
- MCST Solar Spectra. Available online: ftp://mcst.ssaihq.com/pub/permanent/MCST/Solar_Irradiance/ (accessed on 7 November 2017).
- NASA-Langley Solar Constant Comparison Tool. Available online: https://satcorps.larc.nasa.gov/cgi-bin/site/showdoc?mnemonic=SOLAR-CONSTANT-COMPARISONS (accessed on 7 November 2017).
- Guenther, B.; Xiong, X.; Salomonson, V.V.; Barnes, W.L.; Young, J. On-orbit performance of the Earth Observing System Moderate Resolution Imaging Spectroradiometer; first year of data. Remote Sens. Environ. 2002, 83, 16–30. [Google Scholar] [CrossRef]
- Khlopenkov, K.V.; Doelling, D.R.; Okuyama, A. MTSAT-1R visible imager point spread function correction, part II: Theory. IEEE Trans. Geosci. Remote Sens. 2015, 53, 1504–1512. [Google Scholar] [CrossRef]
- Cao, C.; De Luccia, F.J.; Xiong, X.; Wolfe, R.; Weng, F. Early On-Orbit Performance of the Visible Infrared Imaging Radiometer Suite Onboard the Suomi National Polar-Orbiting Partnership (S-NPP) Satellite. IEEE Trans. Geosci. Remote Sens. 2014, 52, 1142–1156. [Google Scholar] [CrossRef]
- Bhatt, R.; Doelling, D.R.; Scarino, B.R.; Gopalan, A.; Haney, C.O.; Minnis, P.; Bedka, K.M. A consistent AVHRR visible calibration record based on multiple methods applicable for the NOAA degrading orbits, Part I: Methodology. J. Atmos. Ocean. Technol. 2016, 33, 2499–2515. [Google Scholar] [CrossRef]
- Doelling, D.R.; Bhatt, R.; Scarino, B.R.; Gopalan, A.; Haney, C.O.; Minnis, P.; Bedka, K.M. A consistent AVHRR visible calibration record based on multiple methods applicable for the NOAA degrading orbits, Part II: Validation. J. Atmos. Ocean. Technol. 2016, 33, 2517–2534. [Google Scholar] [CrossRef]
- CLARREO Pathfinder Web Page. Available online: https://clarreo.larc.nasa.gov/about-pathfinder.html (accessed on 6 February 2018).













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| GEO Domain | 0°E | ~60°E | 140°E | 135°W | 75°W |
|---|---|---|---|---|---|
| GEODERM | Met-9 | Met-7 | MTSAT-2 | GOES-11 | GOES-12 |
| Desert | Libya-4 | Libya-4 | Badain | Sonoran | Sonoran |
| Center (Lat/Lon) | 28.6°/23.4°E | 28.6°/23.4°E | 40.1°/101.8°E | 32.0°/114.5°W | 32.0°/114.5°W |
| ROI | 0.5° × 0.5° | 0.5° × 0.5° | 0.4° × 0.4° | 0.2° × 0.2° | 0.2° × 0.2° |
| Reflectivity | 0.46 | 0.46 | 0.22 | 0.32 | 0.32 |
| Stability (%) | 1.0 | 1.0 | 1.6 | 1.0 | 1.0 |
| VZA | 42.1° | 49.5° | 60.8° | 43.4° | 56.4° |
| Reference Years | 2007–2012 | 2007–2015 | 2010–2015 | 2006–2011 | 2003–2010 |
| GMT | 10:30 | 10:30 | 05:30 | 19:30 | 19:30 |
| SZA range | 5–52° | 6–53° | 17–63° | 8–56° | 8–56° |
| DERM σ (%) | 0.81 | 1.50 | 1.40 | 1.21 | 1.30 |
| GEO | Longitude | Launch Date | Start Date | End Date | Count Response | Bit |
|---|---|---|---|---|---|---|
| GOES-8 | 75°W | 13 April 1994 | April 2000 | March 2003 | Linear | 10 |
| GOES-9 | 155°E | 23 May 1995 | May 2003 | October 2005 | Linear | 10 |
| GOES-10 | 135°W | 25 April 1997 | April 2000 | June 2006 | Linear | 10 |
| GOES-11 | 135°W | 3 May 2000 | August 2006 | November 2011 | Linear | 10 |
| GOES-12 | 75°W | 23 July 2001 | April 2003 | March 2010 | Linear | 10 |
| GOES-13 | 75°W | 24 May 2006 | April 2010 | December 2016 | Linear | 10 |
| GOES-14 1 | 75°W | 28 June 2009 | September 2012 | June 2013 | Linear | 10 |
| GOES-15 | 135°W | 4 March 2010 | December 2011 | March 2017 | Linear | 10 |
| MET-5 2 | 63°E | 2 March 1991 | May 2000 | January 2007 | Linear | 8 |
| MET-7 | 0E | 2 September 1997 | April 2000 | April 2006 | Linear | 8 |
| MET-7 3 | 57°E | 2 September 1997 | March 2007 | December 2016 | Linear | 8 |
| MET-8 | 3.4°E | 28 August 2002 | April 2004 | March 2007 | Linear | 10 |
| MET-9 | 0E | 21 December 2005 | April 2007 | December 2012 | Linear | 10 |
| MET-10 | 0E | 5 July 2012 | March 2013 | December 2016 | Linear | 10 |
| GMS-5 | 140°E | 17 March 1995 | May 2000 | May 2003 | Squared | 8 |
| MTSAT-1R 4 | 140°E | 26 February 2005 | July 2005 | October 2006 | Linear | 10 |
| MTSAT-1R 4 | 140°E | 26 February 2005 | November 2006 | December 2013 | Linear | 10 |
| MTSAT-2 | 145°E | 18 February 2006 | July 2010 | August 2015 | Linear | 10 |
| HIM-8 | 140.7°E | 7 October 2014 | July 2015 | December 2016 | Linear | 11 |
| GEO | Esun | g0 | g1 | g2 | C0 | U (%) |
|---|---|---|---|---|---|---|
| GOES-8 | 518.28 | 0.7144 | 1.062 × 10−4 | 0 | 29 | 0.4 |
| GOES-9 | 515.68 | 0.5209 | 8.286 × 10−5 | 0 | 29 | 0.6 |
| GOES-10 | 504.29 | 0.5106 | 1.898 × 10−4 | −2.334 × 10−8 | 29 | 0.8 |
| GOES-11 | 497.87 | 0.4945 | 6.804 × 10−5 | 0 | 29 | 0.5 |
| GOES-12 | 504.46 | 0.5600 | 1.436 × 10−4 | −1.715 × 10−8 | 29 | 0.7 |
| GOES-13 | 527.75 | 0.6248 | 8.046 × 10−5 | −3.499 × 10−9 | 29 | 0.9 |
| GOES-14 1 | 530.06 | 0.6378 | 4.420 × 10−5 | 0 | 29 | 0.7 |
| GOES-15 | 529.74 | 0.6803 | 8.673 × 10−5 | −3.041 × 10−9 | 29 | 1.2 |
| MET-5 2 | 446.07 | 1.6662 | 8.990 × 10−5 | −3.099 × 10−9 | 4.4 | 0.7 |
| MET-7 | 446.07 | 1.9156 | 2.123 × 10−4 | −2.195 × 10−8 | 4.95 | 1.2 |
| MET-7 3 | 446.07 | 2.1575 | 6.178 × 10−5 | 0 | 4.95 | 1.0 |
| MET-8 | 516.17 | 0.6208 | 9.560 × 10−6 | 0 | 51 | 0.5 |
| MET-9 | 516.07 | 0.5461 | 4.602 × 10−6 | 0 | 51 | 0.7 |
| MET-10 | 518.32 | 0.5655 | 1.434 × 10−5 | 0 | 51 | 0.8 |
| GMS-5 | 418.97 | 6.802 × 10−3 | 1.670 × 10−7 | 0 | 0 | 0.9 |
| MTSAT-1R 4 | 437.53 | 0.3881 | 5.293 × 10−4 | −6.471 × 10−7 | 0 | 2.1 |
| MTSAT-1R 4 | 437.53 | 0.4655 | 6.100 × 10−6 | 0 | 0 | 1.1 |
| MTSAT-2 | 479.33 | 0.4802 | 4.331 × 10−5 | 0 | 1 | 0.9 |
| HIM-8 | 517.21 | 0.2943 | 1.053 × 10−5 | 0 | 20 | 0.4 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Doelling, D.; Haney, C.; Bhatt, R.; Scarino, B.; Gopalan, A. Geostationary Visible Imager Calibration for the CERES SYN1deg Edition 4 Product. Remote Sens. 2018, 10, 288. https://doi.org/10.3390/rs10020288
Doelling D, Haney C, Bhatt R, Scarino B, Gopalan A. Geostationary Visible Imager Calibration for the CERES SYN1deg Edition 4 Product. Remote Sensing. 2018; 10(2):288. https://doi.org/10.3390/rs10020288
Chicago/Turabian StyleDoelling, David, Conor Haney, Rajendra Bhatt, Benjamin Scarino, and Arun Gopalan. 2018. "Geostationary Visible Imager Calibration for the CERES SYN1deg Edition 4 Product" Remote Sensing 10, no. 2: 288. https://doi.org/10.3390/rs10020288
APA StyleDoelling, D., Haney, C., Bhatt, R., Scarino, B., & Gopalan, A. (2018). Geostationary Visible Imager Calibration for the CERES SYN1deg Edition 4 Product. Remote Sensing, 10(2), 288. https://doi.org/10.3390/rs10020288