Long-Term Annual Mapping of Four Cities on Different Continents by Applying a Deep Information Learning Method to Landsat Data

 ,
,  , ,
, ,  ,
,  and
and 
Abstract
:
1. Introduction
2. Materials and Methods
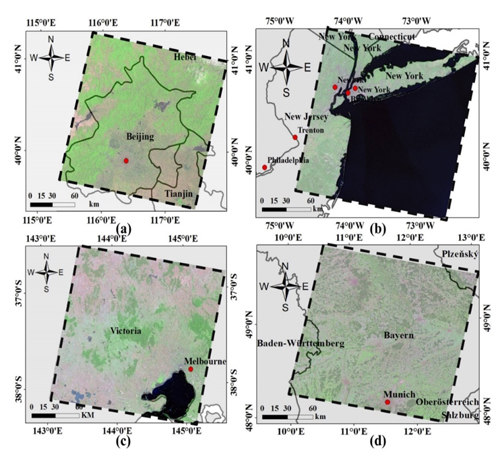
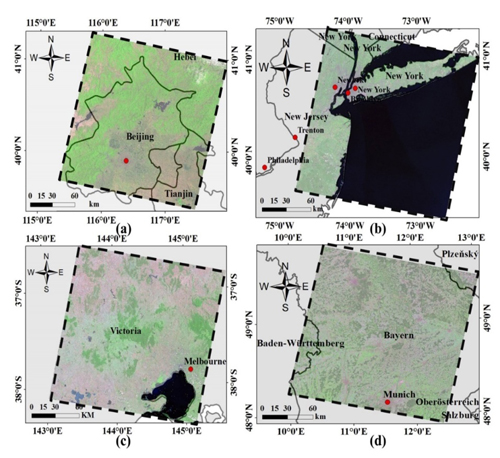
2.1. Study Areas
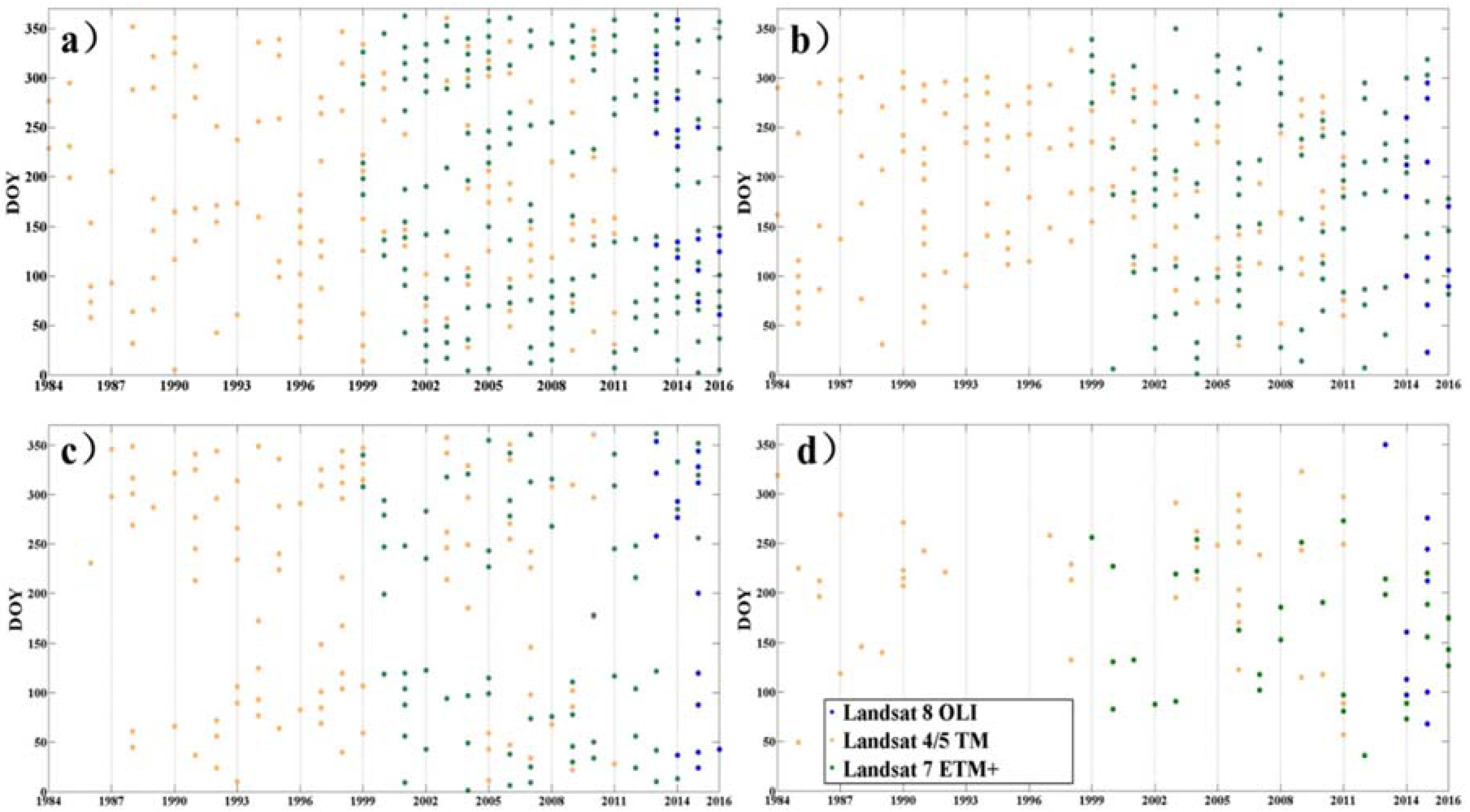
2.2. Data Preprocessing and Collection
2.2.1. Preprocessing
2.2.2. Training Data Collection
2.2.3. Validation Data Collection
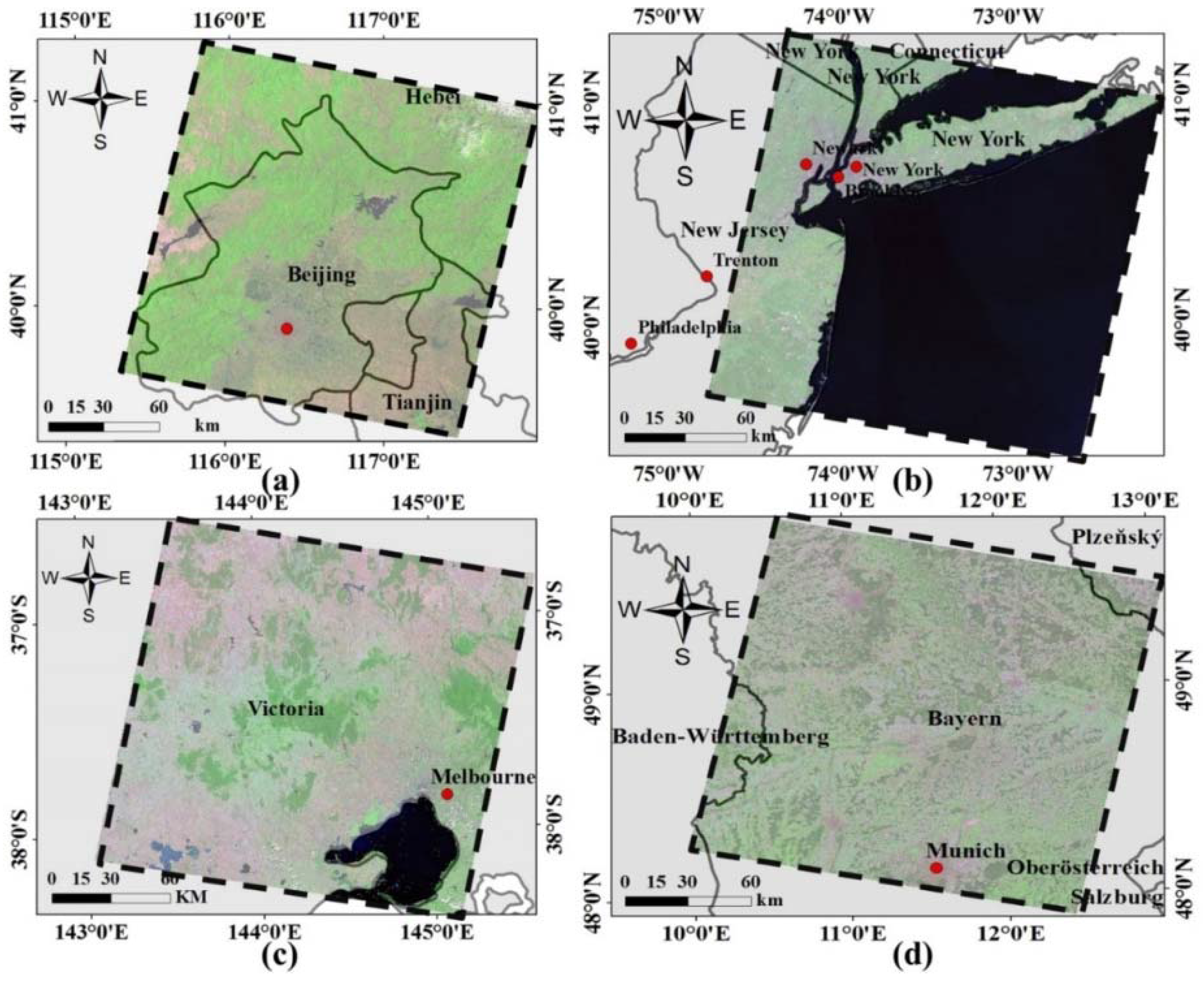
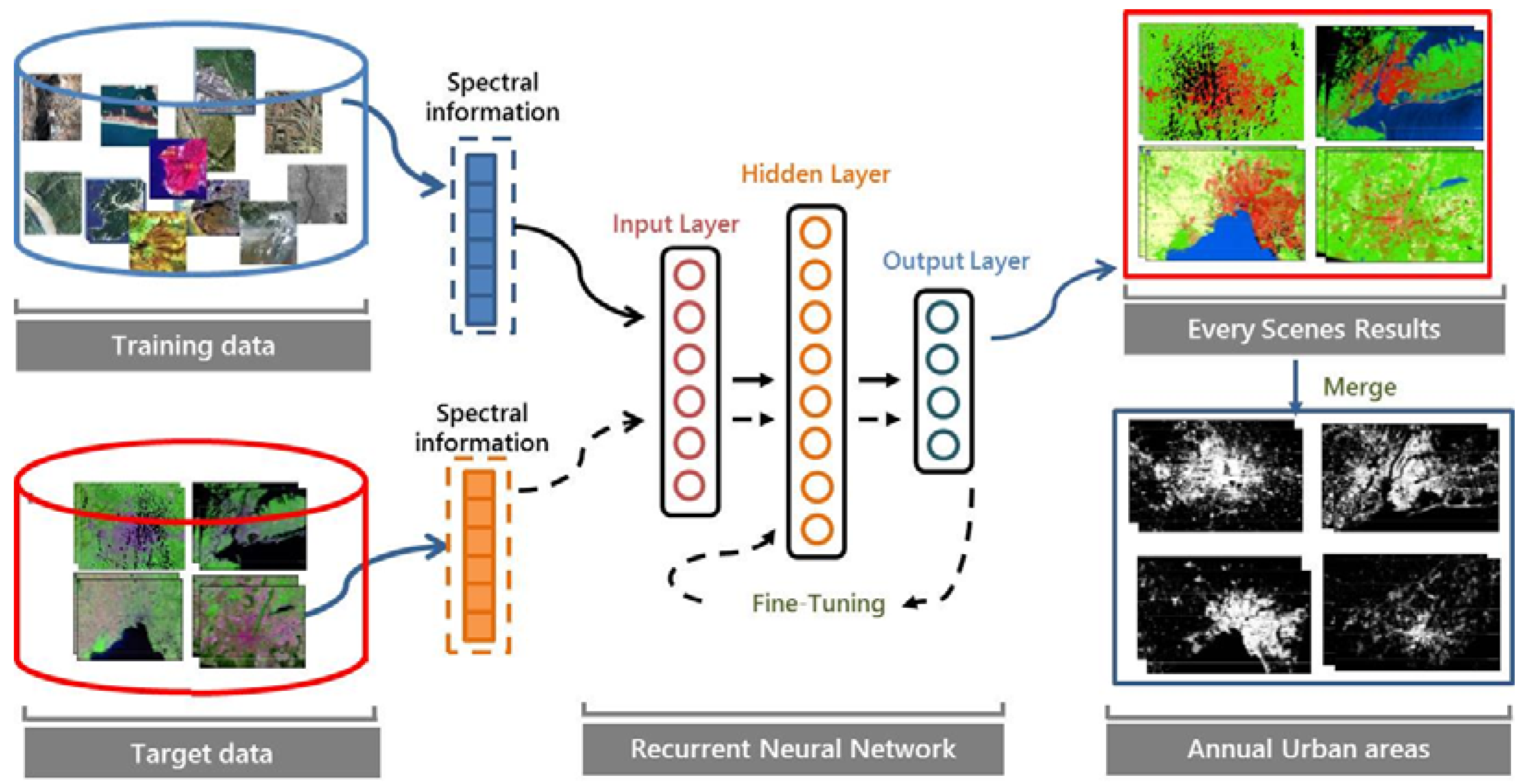
2.3. Method
2.3.1. Offline Training
2.3.2. Online Optimization
3. Results
3.1. Temporal Transfer
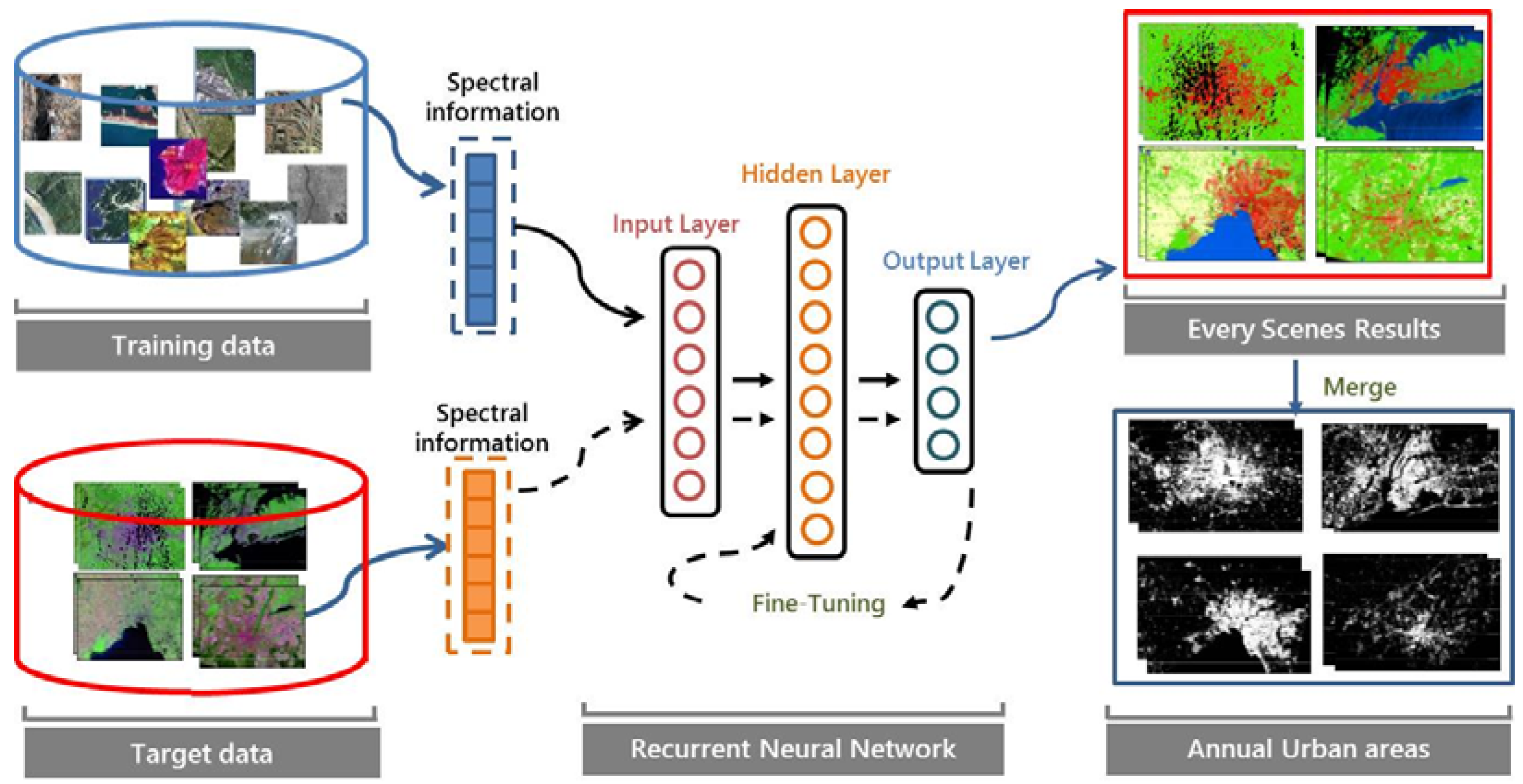
3.1.1. Performance of the Initial Classification
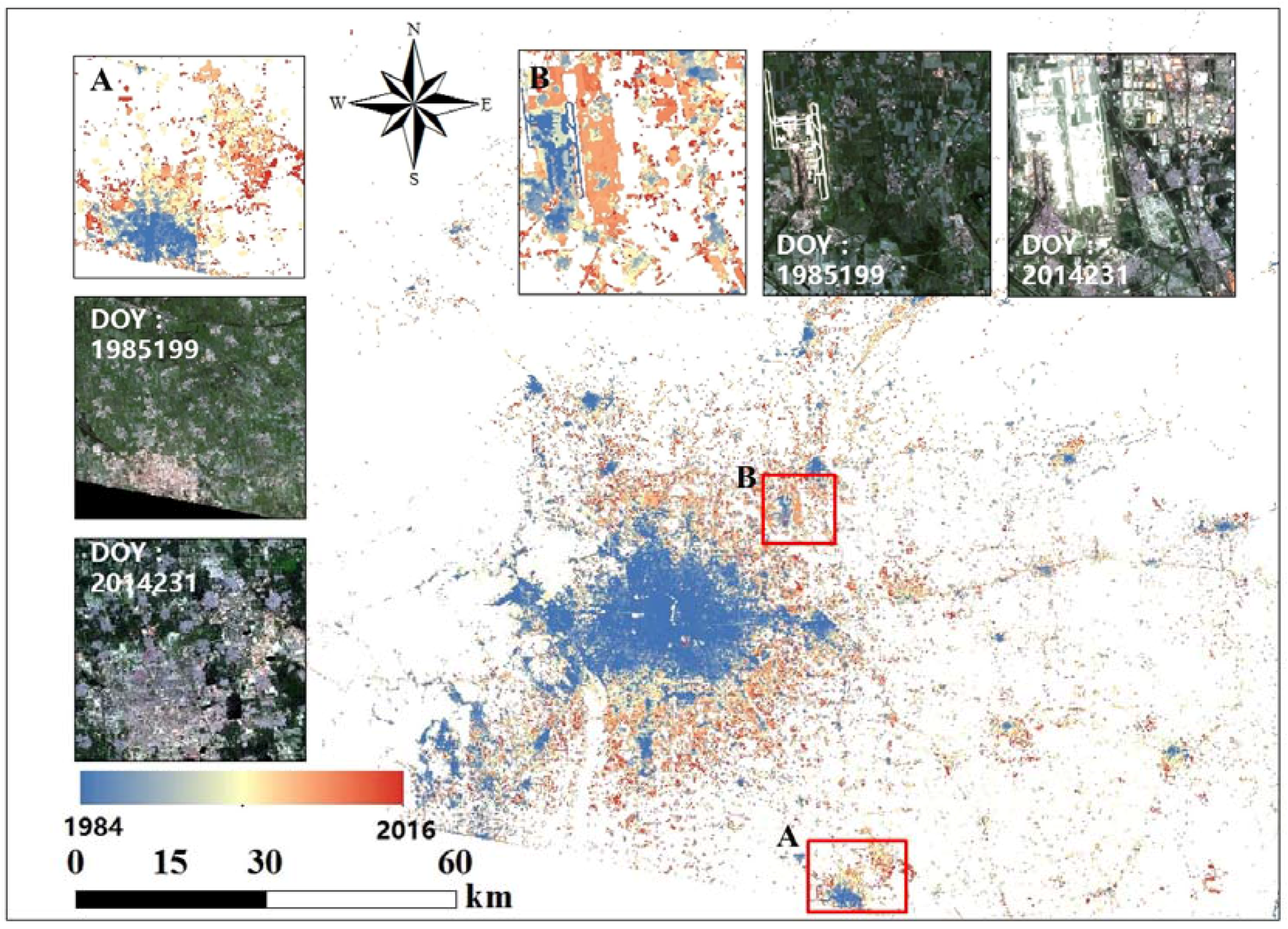
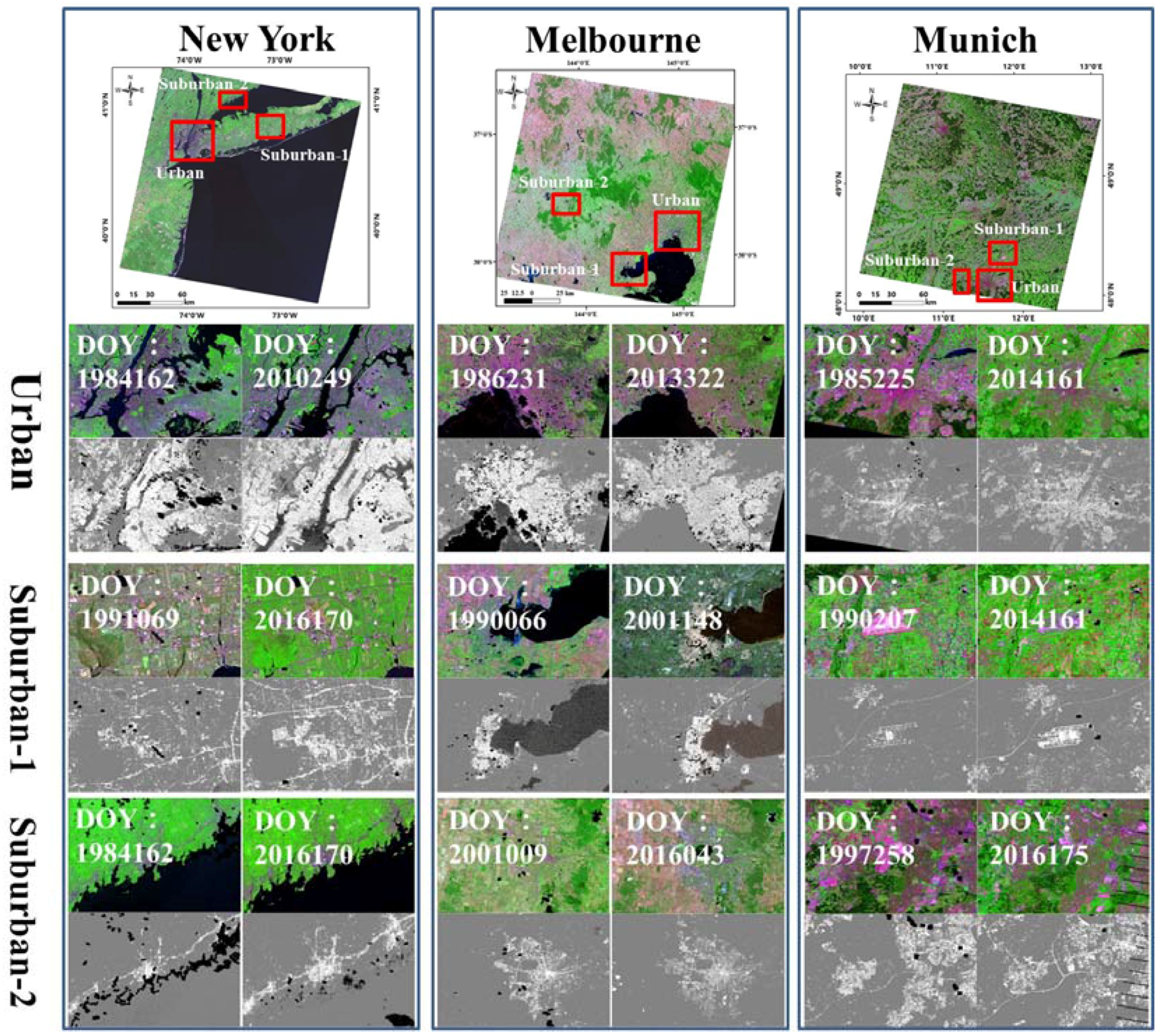
3.1.2. Urban Expansion
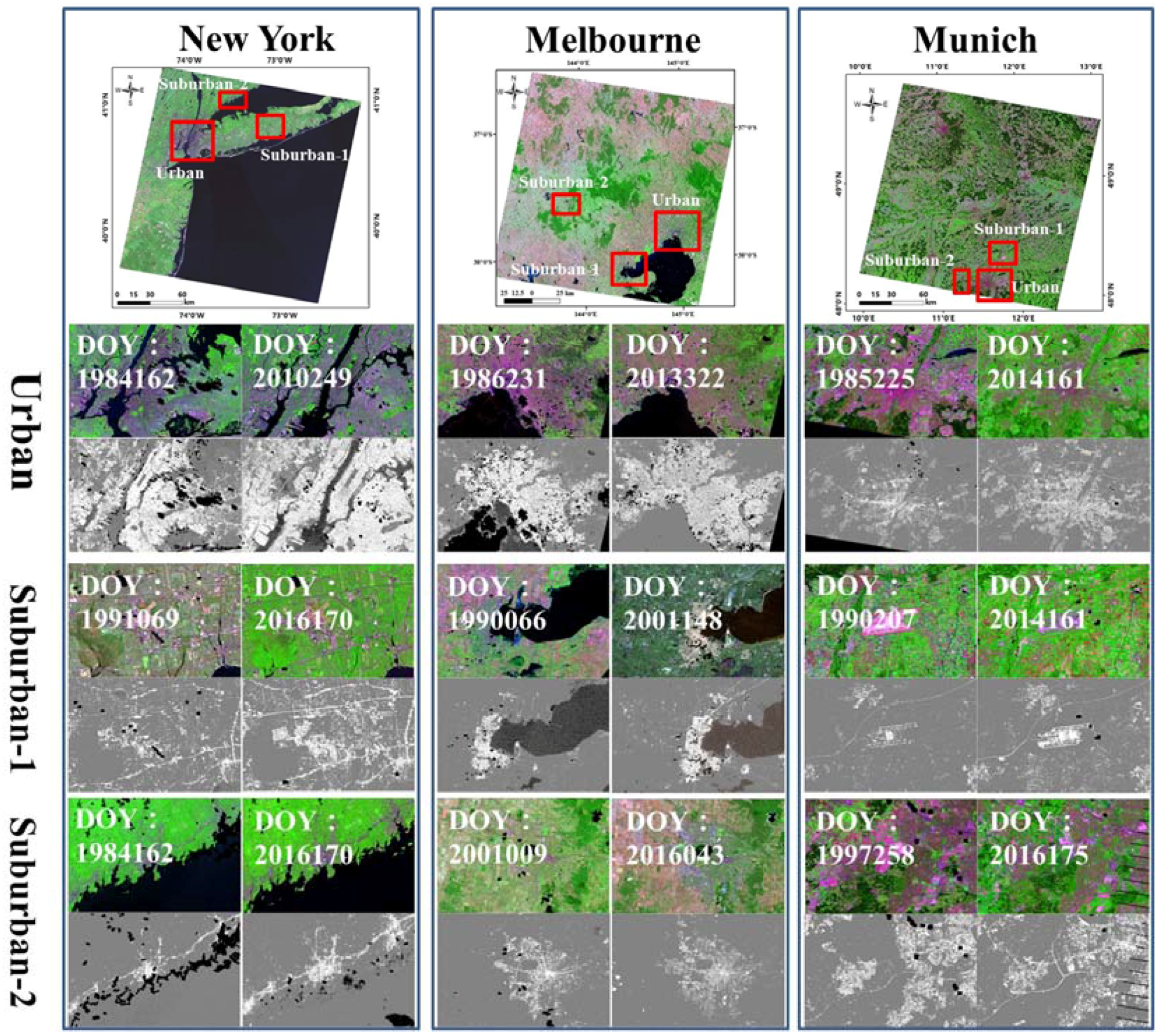
3.2. Spatial Transfer
3.2.1. Performance of the Initial Classification
3.2.2. Urban Expansion
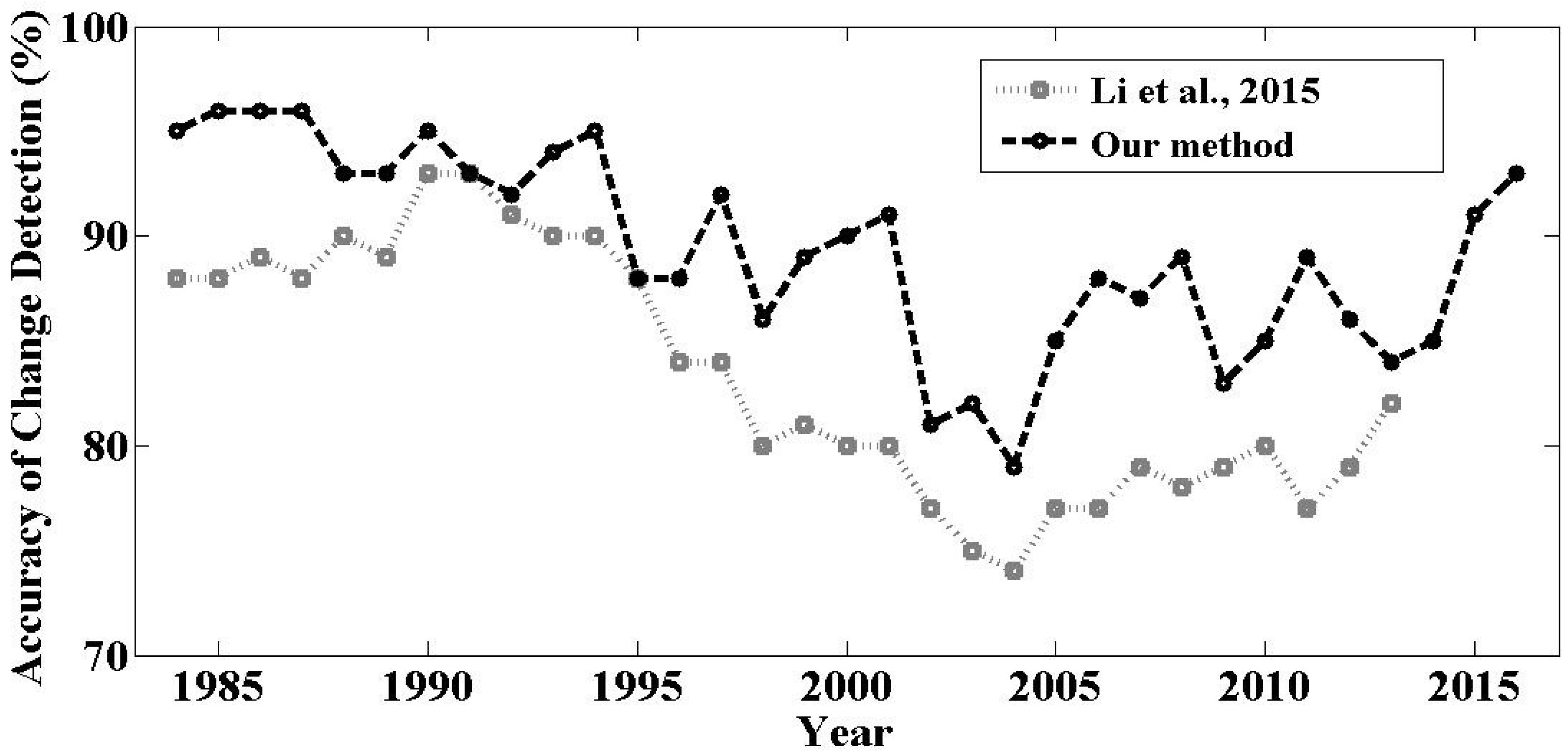
3.3. Comparisons with State-of-the-Art Methods
4. Discussion
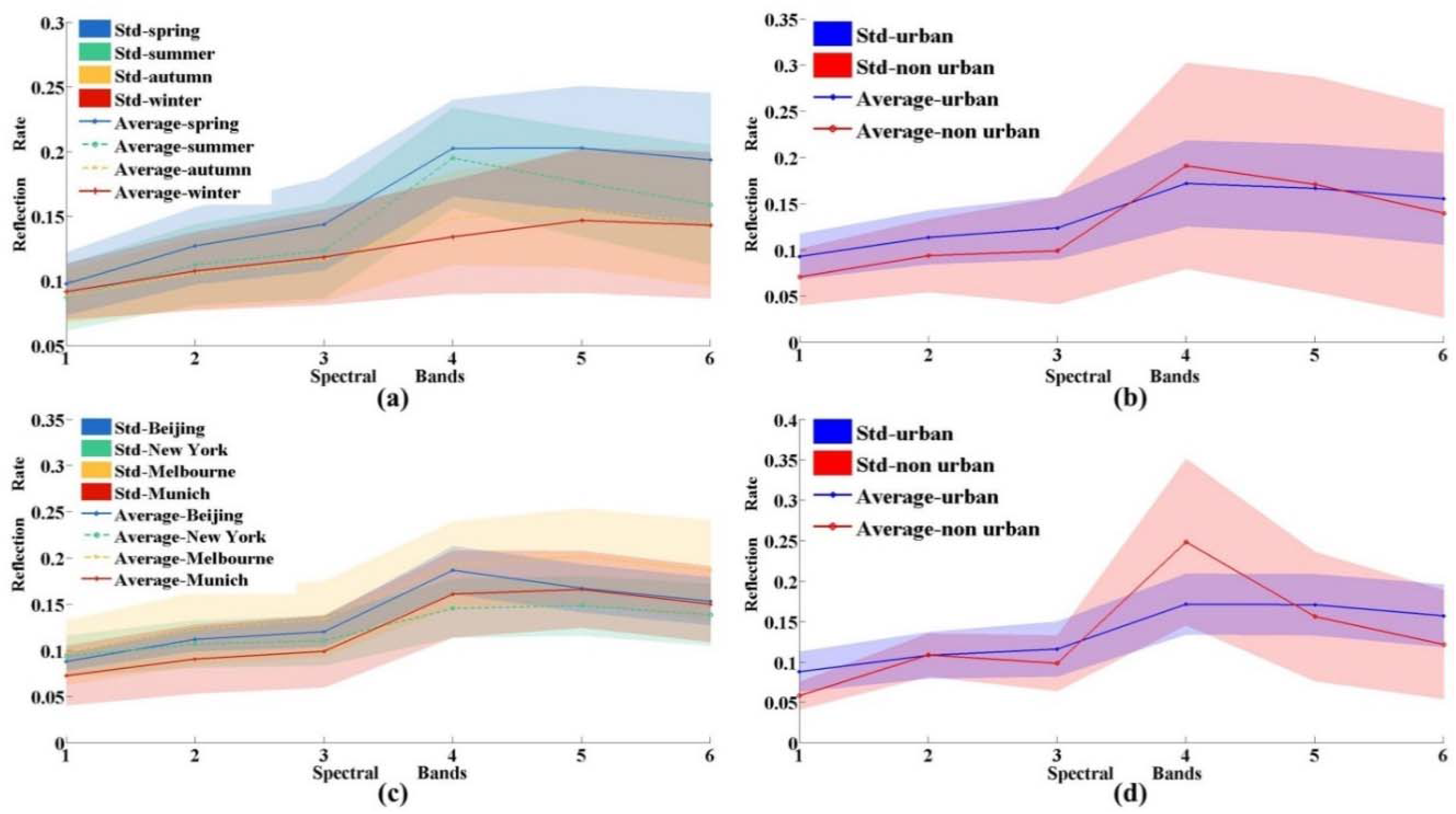
4.1. Applicability of Spectral Information from Landsat
4.2. Variations in Urban Expansion Patterns among Cities
4.3. Limitations of Transfer Learning for Urban Mapping
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Grey, W.M.F.; Luckman, A.J.; Holland, D. Mapping urban change in the UK using satellite radar interferometry. Remote Sens. Environ. 2003, 87, 16–22. [Google Scholar] [CrossRef]
- Schneider, A.; Friedl, M.A.; Potere, D. Mapping global urban areas using MODIS 500-m data: New methods and datasets based on ‘urban ecoregions’. Remote Sens. Environ. 2010, 114, 1733–1746. [Google Scholar] [CrossRef]
- Cao, X.; Chen, J.; Imura, H.; Higashi, O. A SVM-based method to extract urban areas from DMSP-OLS and SPOT VGT data. Remote Sens. Environ. 2009, 113, 2205–2209. [Google Scholar] [CrossRef]
- Foley, J.A.; Defries, R.; Asner, G.P.; Barford, C.; Bonan, G.; Carpenter, S.R.; Chapin, F.S.; Coe, M.T.; Daily, G.C.; Gibbs, H.K. Global consequences of land use. Science 2005, 309, 570–574. [Google Scholar] [CrossRef] [PubMed]
- Grimm, N.B.; Faeth, S.H.; Golubiewski, N.E.; Redman, C.L.; Wu, J.; Bai, X.; Briggs, J.M. Global change and the ecology of cities. Science 2008, 319, 756–760. [Google Scholar] [CrossRef] [PubMed]
- Yu, C.; Xiao, Y.; Ni, S. Changing patterns of urban-rural nutrient flows in China: Driving forces and options. Sci. Bull. 2017, 62, 83–91. [Google Scholar] [CrossRef]
- Li, X.; Li, W.; Middel, A.; Harlan, S.L.; Brazel, A.J.; Ii, B.L.T. Remote sensing of the surface urban heat island and land architecture in Phoenix, Arizona: Combined effects of land composition and configuration and cadastral–demographic–economic factors. Remote Sens. Environ. 2016, 174, 233–243. [Google Scholar] [CrossRef]
- Lu, D.; Tian, H.; Zhou, G.; Ge, H. Regional mapping of human settlements in southeastern China with multisensor remotely sensed data. Remote Sens. Environ. 2008, 112, 3668–3679. [Google Scholar] [CrossRef]
- Ma, T.; Zhou, C.; Tao, P.; Haynie, S.; Fan, J. Quantitative estimation of urbanization dynamics using time series of DMSP/OLS nighttime light data: A comparative case study from China’s cities. Remote Sens. Environ. 2012, 124, 99–107. [Google Scholar] [CrossRef]
- Mertes, C.M.; Schneider, A.; Sulla-Menashe, D.; Tatem, A.J.; Tan, B. Detecting change in urban areas at continental scales with MODIS data. Remote Sens. Environ. 2015, 158, 331–347. [Google Scholar] [CrossRef]
- Boasson, E.; Howarth, P.J. Landsat digital enhancements for change detection in urban environments. Remote Sens. Environ. 1983, 13, 149–160. [Google Scholar]
- Gong, P.; Wang, J.; Yu, L.; Zhao, Y.; Zhao, Y.; Liang, L.; Niu, Z.; Huang, X.; Fu, H.; Liu, S. Finer resolution observation and monitoring of global land cover: First mapping results with Landsat TM and ETM+ data. Int. J. Remote Sens. 2013, 34, 2607–2654. [Google Scholar] [CrossRef]
- Gong, P.; Howarth, P.J. The use of structural information for improving land-cover classification accuracies at the rural-urban fringe. Photogramm. Eng. Remote Sens. 1990, 56, 67–73. [Google Scholar]
- Song, X.P.; Sexton, J.O.; Huang, C.; Channan, S.; Townshend, J.R. Characterizing the magnitude, timing and duration of urban growth from time series of Landsat-based estimates of impervious cover. Remote Sens. Environ. 2016, 175, 1–13. [Google Scholar] [CrossRef]
- Wang, L.; Li, C.C.; Ying, Q.; Xiao, C.; Wang, X.Y.; Li, X.Y.; Hu, L.Y.; Liang, L.; Yu, L.; Huabing, H.; et al. China’s urban expansion from 1990 to 2010 determined with satellite remote sensing. Sci. Bull. 2012, 57, 2802–2812. [Google Scholar] [CrossRef]
- Lambin, E.F.; Geist, H.J.; Lepers, E. Dynamics of Land-use and Land-Cover Change in Tropical Regions. Annu. Rev. Environ. Resour. 2003, 28, 205–241. [Google Scholar] [CrossRef]
- Yang, L.; Huang, C.; Homer, C.G.; Wylie, B.K.; Coan, M.J. An approach for mapping large-area impervious surfaces: Synergistic use of Landsat-7 ETM+ and high spatial resolution imagery. Can. J. Remote Sens. 2003, 29, 230–240. [Google Scholar] [CrossRef]
- Homer, C.; Huang, C.; Yang, L.; Wylie, B.; Coan, M. Development of a 2001 National Land-Cover Database for the United States. Photogramm. Eng. Remote Sens. 2004, 70, 829–840. [Google Scholar] [CrossRef]
- Schneider, A.; Mertes, C.M. Expansion and growth in Chinese cities, 1978–2010. Environ. Res. Lett. 2014, 9, 024008. [Google Scholar] [CrossRef]
- Sexton, J.O.; Song, X.P.; Huang, C.; Channan, S.; Baker, M.E.; Townshend, J.R. Urban growth of the Washington, D.C.–Baltimore, MD metropolitan region from 1984 to 2010 by annual, Landsat-based estimates of impervious cover. Remote Sens. Environ. 2013, 129, 42–53. [Google Scholar] [CrossRef]
- Li, X.; Gong, P.; Liang, L. A 30-year (1984–2013) record of annual urban dynamics of Beijing City derived from Landsat data. Remote Sens. Environ. 2015, 116, 78–90. [Google Scholar] [CrossRef]
- Feyisa, G.L.; Meilby, H.; Jenerette, G.D.; Pauliet, S. Locally optimized separability enhancement indices for urban land cover mapping: Exploring thermal environmental consequences of rapid urbanization in Addis Ababa, Ethiopia. Remote Sens. Environ. 2016, 175, 14–31. [Google Scholar] [CrossRef]
- Shahtahmassebi, A.R.; Lin, Y.; Lin, L.; Atkinson, P.M.; Moore, N.; Wang, K.; He, S.; Huang, L.; Wu, J.; Shen, Z. Reconstructing Historical Land Cover Type and Complexity by Synergistic Use of Landsat Multispectral Scanner and CORONA. Remote Sens. 2017, 9, 682. [Google Scholar] [CrossRef]
- Yang, C.; Wu, G.; Ding, K.; Shi, T.; Li, Q.; Wang, J. Improving Land Use/Land Cover Classification by Integrating Pixel Unmixing and Decision Tree Methods. Remote Sens. 2017, 9, 1222. [Google Scholar] [CrossRef]
- Arai, K. A supervised Thematic Mapper classification with a purification of training samples. Int. J. Remote Sens. 2007, 13, 2039–2049. [Google Scholar] [CrossRef]
- Schneider, A. Monitoring land cover change in urban and peri-urban areas using dense time stacks of Landsat satellite data and a data mining approach. Remote Sens. Environ. 2012, 124, 689–704. [Google Scholar] [CrossRef]
- Lecun, Y.; Bengio, Y.; Hinton, G. Deep learning. Nature 2015, 521, 436–444. [Google Scholar] [CrossRef] [PubMed]
- Yosinski, J.; Clune, J.; Bengio, Y.; Lipson, H. How transferable are features in deep neural networks? Adv. Neural Inf. Process. Syst. 2014, 27, 3320–3328. [Google Scholar]
- Marmanis, D.; Datcu, M.; Esch, T.; Stilla, U. Deep Learning Earth Observation Classification Using ImageNet Pretrained Networks. IEEE Geosci. Remote Sens. Lett. 2016, 13, 105–109. [Google Scholar] [CrossRef]
- Jean, N.; Burke, M.; Xie, M.; Davis, W.M.; Lobell, D.B.; Ermon, S. Combining satellite imagery and machine learning to predict poverty. Science 2016, 353, 790–794. [Google Scholar] [CrossRef] [PubMed]
- Zhu, X.X.; Tuia, D.; Mou, L.; Xia, G.S.; Zhang, L.; Xu, F.; Fraundorfer, F. Deep Learning in Remote Sensing: A Comprehensive Review and List of Resources. IEEE Geosci. Remote Sens. Mag. 2018, 5, 8–36. [Google Scholar] [CrossRef]
- Lyu, H.; Lu, H.; Mou, L. Learning a Transferable Change Rule from a Recurrent Neural Network for Land Cover Change Detection. Remote Sens. 2016, 8, 506. [Google Scholar] [CrossRef]
- Masek, J.G.; Vermote, E.F.; Saleous, N.E.; Wolfe, R.; Hall, F.G.; Huemmrich, K.F.; Gao, F.; Kutler, J.; Lim, T.K. A Landsat surface reflectance dataset for North America, 1990–2000. IEEE Geosci. Remote Sens. Lett. 2006, 3, 68–72. [Google Scholar] [CrossRef]
- Zhu, Z.; Woodcock, C.E. Object-based cloud and cloud shadow detection in Landsat imagery. Remote Sens. Environ. 2012, 118, 83–94. [Google Scholar] [CrossRef]
- Cracknell, A.P.; Kanniah, K.D.; Tan, K.P.; Wang, L. Evaluation of MODIS gross primary productivity and land cover products for the humid tropics using oil palm trees in Peninsular Malaysia and Google Earth imagery. Int. J. Remote Sens. 2013, 34, 7400–7423. [Google Scholar] [CrossRef]
- Cracknell, A.P.; Kanniah, K.D.; Tan, K.P.; Lei, W. Towards the development of a regional version of MOD17 for the determination of gross and net primary productivity of oil palm trees. Int. J. Remote Sens. 2015, 36, 262–289. [Google Scholar] [CrossRef]
- Xian, G.; Homer, C.; Dewitz, J.; Fry, J.; Hossain, N.; Wickham, J. Change of Impervious Surface Area Between 2001 and 2006 in the Conterminous United States. Photogramm. Eng. Remote Sens. 2011, 77, 758–762. [Google Scholar]
- Pan, S.J.; Yang, Q. A Survey on Transfer Learning. IEEE Trans. Knowl. Data Eng. 2010, 22, 1345–1359. [Google Scholar] [CrossRef]
- Xie, M.; Jean, N.; Burke, M.; Lobell, D.; Ermon, S. Transfer Learning from Deep Features for Remote Sensing and Poverty Mapping. arXiv, 2015; arXiv:1510.00098. [Google Scholar]
- Mou, L.; Ghamisi, P.; Zhu, X.X. Deep Recurrent Neural Networks for Hyperspectral Image Classification. IEEE Trans. Geosci. Remote Sens. 2017, 55, 3639–3655. [Google Scholar] [CrossRef]
- Cohen, I.; Cozman, F.G.; Sebe, N.; Cirelo, M.C.; Huang, T.S. Semisupervised learning of classifiers: Theory, algorithms, and their application to human-computer interaction. IEEE Trans. Pattern Anal. 2004, 26, 1553–1566. [Google Scholar] [CrossRef] [PubMed]
- Tüske, Z.; Tahir, M.A.; Schlüter, R.; Ney, H. Integrating Gaussian mixtures into deep neural networks: Softmax layer with hidden variables. In Proceedings of the IEEE International Conference on Acoustics, Speech and Signal Processing, South Brisbane, Australia, 19–24 April 2015; pp. 4285–4289. [Google Scholar]
- Tieleman, T.; Hinton, G.G. Lecture 6.5—RmsProp: Divide the gradient by a running average of its recent magnitude. Neural Netw. Mach. Learn. 2012, 4, 26–31. [Google Scholar]
- Shi, L.; Ling, F.; Ge, Y.; Foody, G.M.; Li, X.; Wang, L.; Zhang, Y.; Du, Y. Impervious Surface Change Mapping with an Uncertainty-Based Spatial-Temporal Consistency Model: A Case Study in Wuhan City Using Landsat Time-Series Datasets from 1987 to 2016. Remote Sens. 2017, 9, 1148. [Google Scholar] [CrossRef]
- Breiman, L. Random Forests. Mach. Learn. 2001, 45, 5–32. [Google Scholar] [CrossRef]
- Cutler, A.; Cutler, D.R.; Stevens, J.R. Random Forests. Mach. Learn. 2004, 45, 157–176. [Google Scholar]
- Tong, S.; Koller, D. Support vector machine active learning with applications to text classification. J. Mach. Learn. Res. 2001, 2, 45–66. [Google Scholar]
- Chang, C.C.; Lin, C.J. LIBSVM: A library for support vector machines. ACM Trans. Intell. Syst. Technol. 2011, 2. [Google Scholar] [CrossRef]
- Mikolov, T.; Karafiát, M.; Burget, L.; Cernocký, J.; Khudanpur, S. Recurrent neural network based language model. In Proceedings of the 11th Annual Conference of the International Speech Communication Association, Chiba, Japan, 26–30 September 2010; pp. 1045–1048. [Google Scholar]
- Graves, A. Long Short-Term Memory. Neural Comput. 2014, 9, 1735–1780. [Google Scholar]
- Li, C.; Wang, J.; Wang, L.; Hu, L.; Gong, P. Comparison of Classification Algorithms and Training Sample Sizes in Urban Land Classification with Landsat Thematic Mapper Imagery. Remote Sens. 2014, 6, 964–983. [Google Scholar] [CrossRef]
- Li, C.; Gong, P.; Wang, J.; Zhu, Z.; Biging, G.S.; Yuan, C.; Hu, T.; Zhang, H.; Wang, Q.; Li, X. The first all-season sample set for mapping global land cover with Landsat-8 data. Sci. Bull. 2017, 7, 508–515. [Google Scholar] [CrossRef]
- Bartholomew, D.J.; Steele, F.; Galbraith, J.I.; Moustaki, I. Analysis of multivariate social science data. Struct. Equ. Model. Multidiscip. J. 2011, 18, 686–693. [Google Scholar]
- Mcgilvray, A. Sydney & Melbourne: A tale of two cities. Nature 2016, S58–S65. [Google Scholar] [CrossRef]
- Gorelick, N.; Hancher, M.; Dixon, M.; Ilyushchenko, S.; Thau, D.; Moore, R. Google Earth Engine: Planetary-scale geospatial analysis for everyone. Remote Sens. Environ. 2017, 202, 18–27. [Google Scholar] [CrossRef]
- Zhang, Q.; Li, B.; Thau, D.; Moore, R. Building a Better Urban Picture: Combining Day and Night Remote Sensing Imagery. Remote Sens. 2015, 2015, 11887–11913. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Year—DOY | FN | TN | FP | TP | OA | UA-N | UA-U | ||
|---|---|---|---|---|---|---|---|---|---|
| Beijing | 1984 | 1984229 | 314 | 9686 | 201 | 9799 | 0.97 | 0.97 | 0.98 |
| 1984277 | 258 | 9742 | 318 | 9682 | 0.97 | 0.97 | 0.97 | ||
| Merged | 198 | 9802 | 54 | 9956 | 0.99 | 0.98 | 0.99 | ||
| 1994 | 1994160 | 1888 | 8112 | 36 | 9964 | 0.90 | 0.81 | 1.00 | |
| 1994256 | 164 | 9836 | 97 | 9903 | 0.99 | 0.98 | 0.99 | ||
| 1994336 | 1438 | 8562 | 569 | 9431 | 0.90 | 0.86 | 0.94 | ||
| Merged | 118 | 9882 | 71 | 9929 | 0.99 | 0.99 | 0.99 | ||
| 2004 | 2004004 | 1024 | 8976 | 14 | 9986 | 0.95 | 0.90 | 1.00 | |
| 2004028 | 249 | 9483 | 166 | 9409 | 0.98 | 0.97 | 0.98 | ||
| 2004036 | 215 | 7158 | 161 | 8626 | 0.98 | 0.97 | 0.98 | ||
| 2004068 | 447 | 7902 | 135 | 8402 | 0.97 | 0.95 | 0.98 | ||
| 2004092 | 197 | 9506 | 173 | 9803 | 0.98 | 0.98 | 0.98 | ||
| 2004100 | 620 | 7968 | 78 | 8257 | 0.96 | 0.93 | 0.99 | ||
| 2004108 | 723 | 9511 | 123 | 9128 | 0.96 | 0.93 | 0.99 | ||
| 2004196 | 870 | 7260 | 25 | 7963 | 0.94 | 0.89 | 1.00 | ||
| 2004244 | 359 | 7469 | 19 | 8679 | 0.98 | 0.95 | 1.00 | ||
| 2004252 | 131 | 9640 | 68 | 9869 | 0.99 | 0.99 | 0.99 | ||
| 2004292 | 1608 | 8825 | 196 | 6158 | 0.89 | 0.85 | 0.97 | ||
| 2004300 | 244 | 9645 | 99 | 9754 | 0.98 | 0.98 | 0.99 | ||
| 2004308 | 527 | 7073 | 25 | 4981 | 0.96 | 0.93 | 1.00 | ||
| 2004324 | 619 | 7511 | 127 | 8363 | 0.96 | 0.92 | 0.99 | ||
| 2004332 | 509 | 8889 | 125 | 9078 | 0.97 | 0.95 | 0.99 | ||
| 2004340 | 322 | 7528 | 204 | 8484 | 0.97 | 0.96 | 0.98 | ||
| Merged | 110 | 9890 | 17 | 9983 | 0.99 | 0.99 | 1.00 | ||
| 2014 | 2014015 | 1235 | 6533 | 1383 | 7362 | 0.84 | 0.84 | 0.84 | |
| 2014063 | 327 | 8754 | 30 | 7155 | 0.98 | 0.96 | 1.00 | ||
| 2014079 | 872 | 8228 | 735 | 7671 | 0.91 | 0.90 | 0.91 | ||
| 2014095 | 274 | 8347 | 532 | 8934 | 0.96 | 0.97 | 0.94 | ||
| 2014119 | 1099 | 7901 | 253 | 9747 | 0.93 | 0.88 | 0.97 | ||
| 2014127 | 1469 | 7571 | 40 | 7765 | 0.91 | 0.84 | 0.99 | ||
| 2014135 | 944 | 9036 | 326 | 9092 | 0.93 | 0.91 | 0.97 | ||
| 2014191 | 276 | 6834 | 15 | 7946 | 0.98 | 0.96 | 1.00 | ||
| 2014207 | 1053 | 8135 | 139 | 7551 | 0.93 | 0.89 | 0.98 | ||
| 2014231 | 493 | 9507 | 139 | 9615 | 0.97 | 0.95 | 0.99 | ||
| 2014239 | 616 | 8400 | 72 | 6398 | 0.96 | 0.93 | 0.99 | ||
| 2014247 | 985 | 9015 | 49 | 9951 | 0.95 | 0.90 | 1.00 | ||
| 2014279 | 945 | 9055 | 659 | 9341 | 0.92 | 0.91 | 0.93 | ||
| 2014287 | 356 | 8688 | 78 | 7728 | 0.97 | 0.96 | 0.99 | ||
| 2014335 | 693 | 8520 | 147 | 8402 | 0.95 | 0.92 | 0.98 | ||
| 2014351 | 1647 | 7080 | 65 | 7690 | 0.90 | 0.81 | 0.99 | ||
| 2014359 | 1510 | 7835 | 65 | 9925 | 0.92 | 0.84 | 0.99 | ||
| Merged | 71 | 9929 | 28 | 9972 | 1.00 | 0.99 | 1.00 | ||
| Year—DOY | FN | TN | FP | TP | OA | UA-N | UA-U | ||
|---|---|---|---|---|---|---|---|---|---|
| New York | 1986 | 1986087 | 529 | 8938 | 131 | 9869 | 0.97 | 0.94 | 0.99 |
| 1986151 | 148 | 9777 | 21 | 9752 | 0.99 | 0.99 | 1.00 | ||
| 1986295 | 435 | 9565 | 126 | 9080 | 0.97 | 0.96 | 0.99 | ||
| Merged | 174 | 9826 | 12 | 9988 | 0.99 | 0.98 | 1.00 | ||
| 1997 | 1997149 | 98 | 5863 | 156 | 7100 | 0.98 | 0.98 | 0.98 | |
| 1997229 | 21 | 9979 | 28 | 7912 | 1.00 | 1.00 | 1.00 | ||
| 1997293 | 122 | 9736 | 69 | 8912 | 0.99 | 0.99 | 0.99 | ||
| Merged | 17 | 9983 | 46 | 9954 | 1.00 | 1.00 | 1.00 | ||
| 2004 | 2004001 | 110 | 7870 | 85 | 5123 | 0.99 | 0.99 | 0.98 | |
| 2004017 | 85 | 5123 | 2 | 678 | 0.99 | 0.98 | 1.00 | ||
| 2004033 | 134 | 9866 | 40 | 9960 | 0.99 | 0.99 | 1.00 | ||
| 2004073 | 416 | 9584 | 400 | 9600 | 0.96 | 0.96 | 0.96 | ||
| 2004097 | 637 | 9363 | 266 | 9734 | 0.95 | 0.94 | 0.97 | ||
| 2004161 | 3700 | 6230 | 240 | 9776 | 0.80 | 0.63 | 0.98 | ||
| 2004185 | 544 | 9456 | 53 | 9947 | 0.97 | 0.95 | 0.99 | ||
| 2004193 | 303 | 9697 | 27 | 9973 | 0.98 | 0.97 | 1.00 | ||
| 2004233 | 386 | 9614 | 190 | 9910 | 0.97 | 0.96 | 0.98 | ||
| 2004257 | 335 | 6461 | 39 | 6830 | 0.97 | 0.95 | 0.99 | ||
| 2004281 | 167 | 9129 | 40 | 9960 | 0.99 | 0.98 | 1.00 | ||
| Merged | 21 | 9979 | 8 | 9992 | 1.00 | 1.00 | 1.00 | ||
| 2014 | 2014100 | 340 | 9629 | 86 | 8850 | 0.98 | 0.97 | 0.99 | |
| 2014140 | 229 | 6805 | 14 | 5230 | 0.98 | 0.97 | 1.00 | ||
| 2014180 | 120 | 7653 | 57 | 9867 | 0.99 | 0.98 | 0.99 | ||
| 2014204 | 78 | 7021 | 135 | 6876 | 0.98 | 0.99 | 0.98 | ||
| 2014212 | 245 | 9021 | 157 | 8484 | 0.98 | 0.97 | 0.98 | ||
| 2014220 | 113 | 6792 | 151 | 5595 | 0.98 | 0.98 | 0.97 | ||
| 2014236 | 115 | 4811 | 197 | 5824 | 0.97 | 0.98 | 0.97 | ||
| 2014260 | 238 | 8913 | 63 | 8751 | 0.98 | 0.97 | 0.99 | ||
| 2014300 | 356 | 6393 | 51 | 3677 | 0.96 | 0.95 | 0.99 | ||
| Merged | 170 | 9830 | 11 | 9927 | 0.99 | 0.98 | 1.00 | ||
| Melbourne | 1986 | 1986231(Merged) | 573 | 9427 | 65 | 9935 | 0.97 | 0.94 | 0.99 |
| 1997 | 1997069 | 691 | 5689 | 57 | 9387 | 0.95 | 0.89 | 0.99 | |
| 1997085 | 59 | 9723 | 20 | 8576 | 1.00 | 0.99 | 1.00 | ||
| 1997101 | 139 | 8971 | 38 | 2528 | 0.98 | 0.98 | 0.99 | ||
| 1997149 | 439 | 8770 | 33 | 7739 | 0.97 | 0.95 | 1.00 | ||
| 1997309 | 340 | 9439 | 133 | 9524 | 0.98 | 0.97 | 0.99 | ||
| 1997325 | 371 | 9626 | 124 | 9871 | 0.98 | 0.96 | 0.99 | ||
| Merged | 312 | 9688 | 10 | 9990 | 0.98 | 0.97 | 1.00 | ||
| 2004 | 2004001 | 224 | 6899 | 193 | 7837 | 0.97 | 0.97 | 0.98 | |
| 2004097 | 266 | 5686 | 542 | 6048 | 0.94 | 0.96 | 0.92 | ||
| 2004185 | 447 | 8054 | 68 | 7166 | 0.97 | 0.95 | 0.99 | ||
| 2004249 | 88 | 8981 | 12 | 9173 | 0.99 | 0.99 | 1.00 | ||
| 2004297 | 61 | 8152 | 31 | 9688 | 0.99 | 0.99 | 1.00 | ||
| 2004321 | 182 | 8486 | 21 | 7365 | 0.99 | 0.98 | 1.00 | ||
| 2004329 | 432 | 9304 | 116 | 9880 | 0.97 | 0.96 | 0.99 | ||
| Merged | 49 | 9951 | 15 | 9985 | 1.00 | 1.00 | 1.00 | ||
| 2014 | 2014013 | 380 | 6710 | 19 | 8410 | 0.97 | 0.95 | 1.00 | |
| 2014037 | 1560 | 6050 | 2 | 7970 | 0.90 | 0.80 | 1.00 | ||
| 2014277 | 687 | 7718 | 45 | 8526 | 0.96 | 0.92 | 0.99 | ||
| 2014285 | 322 | 7597 | 74 | 8395 | 0.98 | 0.96 | 0.99 | ||
| 2014293 | 929 | 9071 | 23 | 9977 | 0.95 | 0.91 | 1.00 | ||
| 2014333 | 286 | 8972 | 108 | 8973 | 0.98 | 0.97 | 0.99 | ||
| Merged | 148 | 9852 | 15 | 9985 | 0.99 | 0.99 | 1.00 | ||
| Munich | 1986 | 1986196 | 1488 | 8510 | 150 | 9817 | 0.92 | 0.85 | 0.98 |
| 1986212 | 558 | 7973 | 19 | 5315 | 0.96 | 0.93 | 1.00 | ||
| Merged | 354 | 9646 | 74 | 9926 | 0.98 | 0.96 | 0.99 | ||
| 1997 | 1997258(Merged) | 274 | 9726 | 186 | 9814 | 0.98 | 0.97 | 0.98 | |
| 2004 | 2004214 | 795 | 7312 | 6 | 4914 | 0.94 | 0.90 | 1.00 | |
| 2004222 | 1691 | 7403 | 182 | 8128 | 0.89 | 0.81 | 0.98 | ||
| 2004246 | 205 | 9787 | 35 | 9916 | 0.99 | 0.98 | 1.00 | ||
| 2004254 | 607 | 7126 | 104 | 8467 | 0.96 | 0.92 | 0.99 | ||
| 2004262 | 873 | 9118 | 70 | 9842 | 0.95 | 0.91 | 0.99 | ||
| Merged | 241 | 9759 | 14 | 9986 | 0.99 | 0.98 | 1.00 | ||
| 2014 | 2014073 | 285 | 7890 | 105 | 8028 | 0.98 | 0.97 | 0.99 | |
| 2014089 | 2102 | 7271 | 317 | 8328 | 0.87 | 0.78 | 0.96 | ||
| 2014097 | 451 | 8722 | 287 | 5886 | 0.95 | 0.95 | 0.95 | ||
| 2014113 | 1120 | 8122 | 87 | 6344 | 0.92 | 0.88 | 0.99 | ||
| 2014161 | 614 | 8090 | 133 | 9513 | 0.96 | 0.93 | 0.99 | ||
| Merged | 282 | 9718 | 96 | 9904 | 0.98 | 0.97 | 0.99 | ||
| SVM-RBF (%) | RF (%) | RNN-LSTM (%) | Proposed Framework (%) | ||
|---|---|---|---|---|---|
| Temporal transfer | Beijing | 68.63 | 71.38 | 76.25 | 81.87 |
| Spatial transfer | New York | 69.13 | 72.75 | 80.63 | 82.08 |
| Melbourne | 71.25 | 67.63 | 85.88 | 84.75 | |
| Munich | 79.25 | 78.2 | 86.87 | 90.63 | |
| Run-Time (min) | - | 7.53 | 0.37 | 0.78 | 0.82 |
| Intra-Class Distance | Inter-Class Distance | |||
|---|---|---|---|---|
| Non-Urban | Urban | Non-Urban To Urban | ||
| Temporal Transfer | Spectral features | 0.72 | 0.41 | 0.68 |
| Deep Features | 0.55 | 0.37 | 1.04 | |
| Spatial Transfer | Spectral features | 0.43 | 0.48 | 0.42 |
| Deep Features | 0.37 | 0.4 | 0.51 | |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lyu, H.; Lu, H.; Mou, L.; Li, W.; Wright, J.; Li, X.; Li, X.; Zhu, X.X.; Wang, J.; Yu, L.; et al. Long-Term Annual Mapping of Four Cities on Different Continents by Applying a Deep Information Learning Method to Landsat Data. Remote Sens. 2018, 10, 471. https://doi.org/10.3390/rs10030471
Lyu H, Lu H, Mou L, Li W, Wright J, Li X, Li X, Zhu XX, Wang J, Yu L, et al. Long-Term Annual Mapping of Four Cities on Different Continents by Applying a Deep Information Learning Method to Landsat Data. Remote Sensing. 2018; 10(3):471. https://doi.org/10.3390/rs10030471
Chicago/Turabian StyleLyu, Haobo, Hui Lu, Lichao Mou, Wenyu Li, Jonathon Wright, Xuecao Li, Xinlu Li, Xiao Xiang Zhu, Jie Wang, Le Yu, and et al. 2018. "Long-Term Annual Mapping of Four Cities on Different Continents by Applying a Deep Information Learning Method to Landsat Data" Remote Sensing 10, no. 3: 471. https://doi.org/10.3390/rs10030471
APA StyleLyu, H., Lu, H., Mou, L., Li, W., Wright, J., Li, X., Li, X., Zhu, X. X., Wang, J., Yu, L., & Gong, P. (2018). Long-Term Annual Mapping of Four Cities on Different Continents by Applying a Deep Information Learning Method to Landsat Data. Remote Sensing, 10(3), 471. https://doi.org/10.3390/rs10030471