An Improved Seeded Region Growing-Based Seamline Network Generation Method


Abstract
:
1. Introduction
2. Materials and Methods
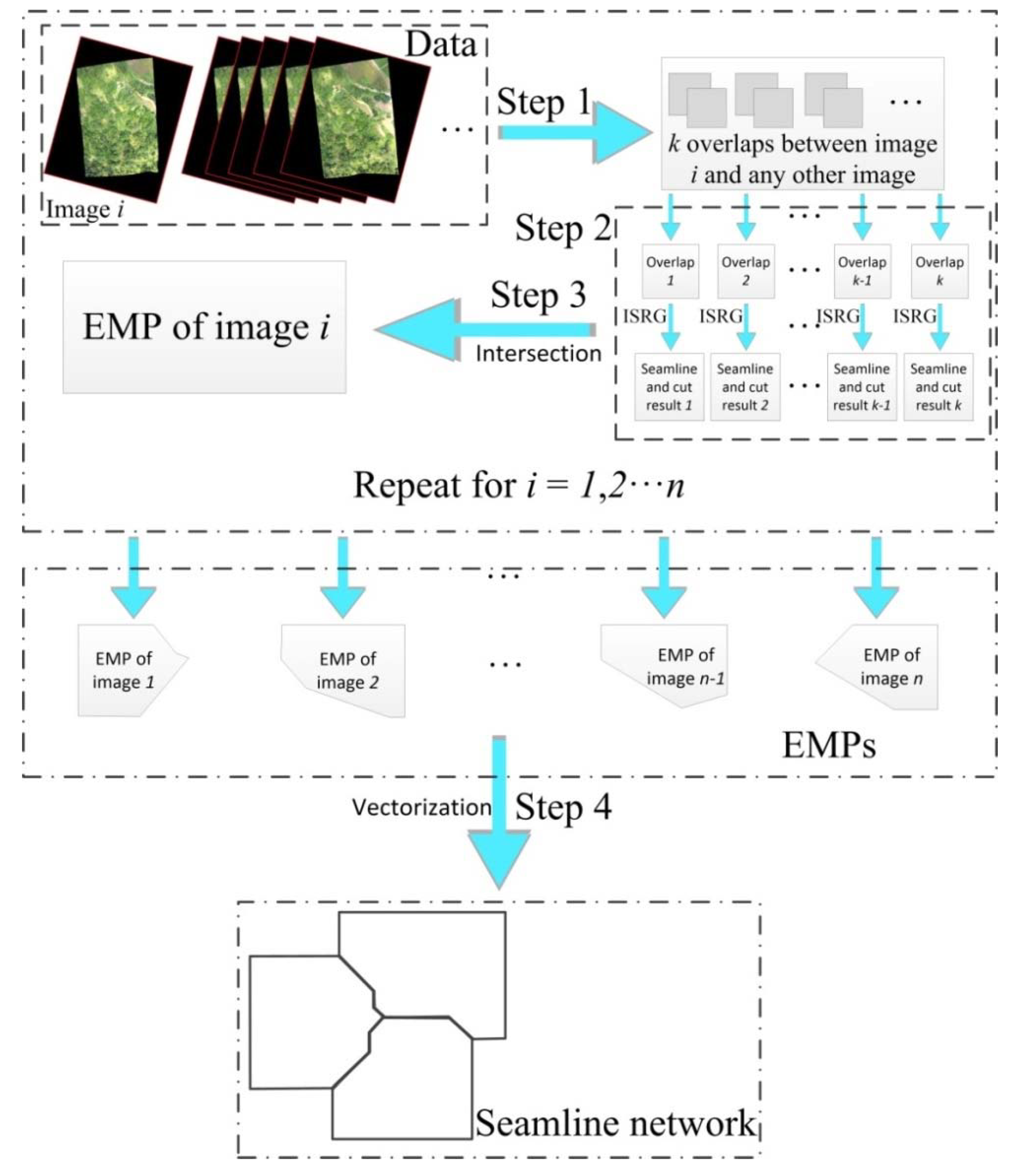
2.1. Obtaining Effective Areas and Overlap Regions between Images
2.2. Generation of the Seamline and the Corresponding Cut Result
- 1:
- Seed1 ← ABC
- 2:
- Seed2 ← ADC
- 3:
- S ← Φ
- 4:
- IfS does not generate
- 5:
- Do seed growing using Seed1 and Seed2 simultaneously to generate S
- 6:
- return S
2.3. Determination of Each Image’s EMP
2.4. Vectorization to Generate the Seamline Network
3. Results
3.1. Experiment 1
3.2. Experiment 2
3.3. Comparative Experiments
4. Discussion
4.1. The Relationship between Processing Time, Accuracy, and the Down-Sampling Rate
4.2. The Data Type of Template Matrix
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Chon, J.; Kim, H.; Lin, C.S. Seam-line determination for image mosaicking: A technique minimizing the maximum local mismatch and the global cost. ISPRS J. Photogramm. Remote Sens. 2010, 65, 86–92. [Google Scholar] [CrossRef]
- Afek, Y.; Brand, A. Mosaicking of Orthorctified Aerial Image. Photogramm. Eng. Remote Sens. 1998, 64, 115–125. [Google Scholar]
- Peleg, S.; Rousso, B.; Ravacha, A.; Zomet, A. Mosaicing on Adaptive Manifolds. IEEE Trans. Pattern Anal. Mach. Intell. 2000, 22, 1144–1154. [Google Scholar] [CrossRef]
- Hu, F.; Li, T.; Geng, Z. Constraints-based graph embedding optimal surveillance-video mosaicking. In Proceedings of the First Asian Conference on Pattern Recognition, Beijing, China, 28 November 2011; pp. 311–315. [Google Scholar]
- Brown, M.; Lowe, D.G. Automatic Panoramic Image Stitching using Invariant Features. Int. J. Comput. Vis. 2007, 74, 59–73. [Google Scholar] [CrossRef]
- Xandri, R.; Pérez, F.; Palà, V.; Arbiol, R. Automatic generation of seamless mosaics over extensive areas from high resolution imagery. In Proceedings of the 9th World Multi-Conference on Systemics, Cybernetics and Informatics, Informatics, Orlando, FL, USA, 13 July 2005; pp. 1–6. [Google Scholar]
- Yang, Y.; Gao, Y.; Li, H.; Han, Y. An Algorithm for Remote Sensing Image Mosaic Based on Valid Area. In Proceedings of the IEEE International Symposium on Image and Data Fusion, Tengchong, China, 9–11 August 2011; pp. 1–4. [Google Scholar]
- Wang, D.; Wan, Y.; Xiao, J.; Lai, X.; Huang, W.; Xu, J. Aerial Image Mosaicking with the Aid of Vector Roads. Photogramm. Eng. Remote Sens. 2012, 78, 1141–1150. [Google Scholar] [CrossRef]
- Chen, Q.; Sun, M.; Hu, X.; Zhang, Z. Automatic Seamline Network Generation for Urban Orthophoto Mosaicking with the Use of a Digital Surface Model. Remote Sens. 2014, 6, 12334–12359. [Google Scholar] [CrossRef] [Green Version]
- Pang, S.; Sun, M.; Hu, X.; Zhang, Z. SGM-based seamline determination for urban orthophoto mosaicking. ISPRS J. Photogramm. Remote Sens. 2016, 112, 1–12. [Google Scholar] [CrossRef]
- Hsu, S.; Kumar, R. Automated mosaics via topology inference. Comput. Graph. Appl. IEEE 2002, 22, 44–54. [Google Scholar] [CrossRef]
- Ma, H.C.; Sun, J. Intelligent optimization of seam-line finding for orthophoto mosaicking with LiDAR point clouds. J. Zhejiang Univ. Sci. C 2011, 12, 417–429. [Google Scholar] [CrossRef]
- Pan, J.; Wang, M.; Li, D.; Li, J. Automatic Generation of Seamline Network Using Area Voronoi Diagrams with Overlap. IEEE Trans. Geosci. Remote Sens. 2009, 47, 1737–1744. [Google Scholar] [CrossRef]
- Mills, S.; Mcleod, P. Global seamline networks for orthomosaic generation via local search. ISPRS J. Photogramm. Remote Sens. 2013, 75, 101–111. [Google Scholar] [CrossRef]
- Pan, J.; Wang, M.; Ma, D.; Zhou, Q.; Li, J. Seamline Network Refinement Based on Area Voronoi Diagrams with Overlap. IEEE Trans. Geosci. Remote Sens. 2014, 52, 1658–1666. [Google Scholar] [CrossRef]
- Fernandez, E.; Garfinkel, R.; Arbiol, R. Mosaicking of Aerial Photographic Maps via Seams Defined by Bottleneck Shortest Paths. Oper. Res. 1998, 46, 293–304. [Google Scholar] [CrossRef]
- Kerschner, M. Seamline detection in colour orthoimage mosaicking by use of twin snakes. ISPRS J. Photogramm. Remote Sens. 2001, 56, 53–64. [Google Scholar] [CrossRef]
- Pan, J.; Wang, M.; Li, J.; Yuan, S.; Hu, F. Region change rate-driven seamline determination method. ISPRS J. Photogramm. Remote Sens. 2015, 105, 141–154. [Google Scholar] [CrossRef]
- Li, L.; Yao, J.; Liu, Y.; Yuan, W.; Shi, S.Z.; Yuan, S.G. Optimal Seamline Detection for Orthoimage Mosaicking by Combining Deep Convolutional Neural Network and Graph Cuts. Remote Sens. 2017, 9, 701. [Google Scholar] [CrossRef]
- Dong, Q.; Liu, J. Seamline Determination Based on PKGC Segmentation for Remote Sensing Image Mosaicking. Sensors 2017, 17, 1721. [Google Scholar] [CrossRef] [PubMed]
- Moradi, J.Y.; Pappas, M. A Boundary Tracking Optimization Algorithm for Constrained Nonlinear Problems. J. Mech. Des. 1978, 100, 292–296. [Google Scholar] [CrossRef]
- Pan, J.; Wang, M.; Li, Q. Fast mosaic algorithm based on scanning line filling. Sci. Surv. Mapp. 2006, 31, 8–9. [Google Scholar]
- Adams, R.; Bischof, L. Seeded region growing. IEEE Trans. Pattern Anal. Mach. Intell. 1994, 16, 641–647. [Google Scholar] [CrossRef]
- Chen, R.X.; Zhao, Z.M.; Pan, J. A Fast Method of Vectorization for RS Classified Raster Map. J. Remote Sens. 2006, 10, 326–331. [Google Scholar]
- Wan, Y.; Wang, D.; Xiao, J.; Lai, X.; Xu, J. Automatic determination of seamlines for aerial image mosaicking based on vector roads alone. ISPRS J. Photogramm. Remote Sens. 2013, 76, 1–10. [Google Scholar] [CrossRef]
- Du, P.; Tan, K.; Xing, X. A novel binary tree support vector machine for hyperspectral remote sensing image classification. Opt. Commun. 2012, 285, 3054–3060. [Google Scholar] [CrossRef]
- Stehman, S.V. Selecting and interpreting measures of thematic classification accuracy. Remote Sens. Environ. 1997, 62, 77–89. [Google Scholar] [CrossRef]



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| In the Mosaic Area | Outside of the Mosaic Area | Total | |
|---|---|---|---|
| In effective areas in original images | X11 | X12 | S1 |
| In invalid areas in original images | X21 | X22 | S2 |
| Total | T1 | T2 | N |
| Data | Method | T/ms | k | OA | E | M |
|---|---|---|---|---|---|---|
| Data Set 1 | This paper’s method | 17,347 | 1.0 | 1.0 | 0.0 | 0.0 |
| Pan et al.’s (2014) method | 343 | 0.9801 | 0.9901 | 0.0001 | 0.0204 | |
| Wan et al.’s (2013) method | 10,624 + Δ 1 | 1.0 | 1.0 | 0.0 | 0.0 | |
| Data Set 2 | This paper’s method | 49,187 | 1.0 | 1.0 | 0.0 | 0.0 |
| Pan et al.’s (2014) method | 725 | 0.9838 | 0.9919 | 0.0130 | 0.0026 | |
| Wan et al.’s (2013) method | 13,885 + Δ 1 | 1.0 | 1.0 | 0.0 | 0.0 | |
| The method in ERDAS | 55,750 | 1.0 | 1.0 | 0.0 | 0.0 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pan, J.; Fang, Z.; Chen, S.; Ge, H.; Hu, F.; Wang, M. An Improved Seeded Region Growing-Based Seamline Network Generation Method. Remote Sens. 2018, 10, 1065. https://doi.org/10.3390/rs10071065
Pan J, Fang Z, Chen S, Ge H, Hu F, Wang M. An Improved Seeded Region Growing-Based Seamline Network Generation Method. Remote Sensing. 2018; 10(7):1065. https://doi.org/10.3390/rs10071065
Chicago/Turabian StylePan, Jun, Zhonghao Fang, Shengtong Chen, Huan Ge, Fen Hu, and Mi Wang. 2018. "An Improved Seeded Region Growing-Based Seamline Network Generation Method" Remote Sensing 10, no. 7: 1065. https://doi.org/10.3390/rs10071065