1. Introduction
Terrestrial laser scanning (TLS) is an outstanding technology for spatial and geographical data acquisition and has been widely used in various fields. The advantage of TLS over other surveying techniques is that it can provide accurate and dense sets of 3D coordinates of scanned objects in a fast and noninvasive manner by firing monochromatic beams of light to obtain the distances (ranges) between the scanned points and the scanner center. The achievable distance precision is highly important in deciding whether TLS is suitable for a task or not [
1]. Achievable distance precision determines the accuracy and reliability of the point cloud and the performance of the instrument. Consequently, distance measurement unit is a core component of TLSs. The investigation of distance measurement error sources and solutions is of vital importance to the improvement of TLS data accuracy and quality and has attracted widespread attention from manufacturers, users, and researchers in the past two decades [
2,
3,
4,
5,
6,
7,
8,
9].
Theoretically, the distance measurement accuracy of TLS is influenced by instrument mechanism, atmospheric conditions, scanning geometry (i.e., distance and incidence angle), and target surface properties [
2]. Only the acquisition configuration and the target surface properties must be considered for the compensation of distance measurement errors because the atmospheric conditions near the surface of the Earth are relatively stable and the instrument mechanism is usually unchanged during one campaign. The effects of distance and incidence angle on distance measurement accuracy have been extensively studied, whereas research about distance measurement errors caused by target properties is relatively rare. The reflectorless nature of TLS rangefinders increases the possibility of distance measurement errors due to the pulse attenuation by the reflecting surfaces [
1,
6]. The distance errors caused by the properties of rough and dull surfaces usually measure a few millimeters. However, these errors can significantly increase to centimeter and even decimeter levels [
8,
10] for smooth surfaces because diffuse and specular reflections exist in all-natural surfaces and the type of reflection affects the direction and strength of backscattered light. For targets with a relatively smooth or glossy surface (e.g., water [
11,
12,
13], fresh ice [
14,
15,
16], foliage/leaves [
17,
18], metal [
19], porcelain, and plastic [
20,
21]), specular reflections are dominant over diffuse reflections. For a generally smooth surface of multiple facets with different orientations, specular reflections are distributed in the surroundings of the reflection angle direction [
22]. The target specular reflections can significantly change the amplitude, width, or shape of the backscattered signal, especially in the case of small incidence angles that are close to zero due to the coincidence of the emitter and receiver [
19,
23]. A deformed signal influences the scanner system’s determination of the arrival time of the backscattered echo or the phase comparison between the emitted and received signals. Thus, target specular reflections can lead to errors in distance observations and even in the saturation effect [
10,
19,
20,
21,
23,
24] of photodetectors due to the extremely high amplitude of returned pulses.
As stated above, distance measurement errors for a certain TLS are influenced by the target surface properties, range, and incidence angle. A direct solution is to consider these factors individually. While this is feasible for the distance, the surface properties for individual points are usually unknown [
1]. The incidence angles for single points can be computed using neighborhood points, but they are vulnerable to local point density and noise [
1]. Therefore, considering distance, incidence angle, and target surface properties separately is not practical for modeling distance errors because most of them are unavailable or unreliable.
In addition to discrete topography measurements, nearly all current TLS instruments simultaneously measure the power of the backscattered laser signal of each point and record it as an intensity value [
25,
26,
27]. Backscattered optical power is internally converted to voltage, amplified in the system, and finally transformed into a digital number, i.e., a scaled integer value called “intensity” [
28]. Intensity, which is insensitive to ambient light and shadowing, is initially used to improve point cloud separability [
29,
30]. Apart from visualization purposes, various object-based studies can adopt intensity data as a major or complementary data source [
31,
32,
33,
34,
35]. Intensity and distance are two types of data in TLS, one for physical and the other for geometry. No connection seems to exist between these data. However, the intensity detected by a TLS system is also mainly affected by target scattering characteristics, range, and incidence angle [
36,
37,
38,
39,
40], which are nearly the same as those of the distance measurement errors [
1]. Additionally, when the backscattered signal reaches the TLS, the receiver distance measurement unit calculates the distance based on the features of the backscattered signal. Synchronously, the TLS system obtains the intensity value according to the amplitude of the backscattered signal. Therefore, both distance and intensity are derived from the features of the backscattered signal. Thus, a certain link exists between the intensity value and the distance error, and this connection is the theoretical basis for this study. Instead of investigating the influencing factors individually, the intensity value can be solely used to interpret the anomalous distance measurement phenomena caused by target specular reflections and establish a distance error correction model.
The anomalies in distance measurements of retro-reflective targets were first investigated in Pesci et al. [
10]. However, only some qualitative/semi-quantitative results and conclusions were obtained. Wujanz et al. [
1] first attempted to experimentally establish a TLS intensity-based stochastic distance model for the diffuse reflections of scanned targets. A strong relationship between intensity and distance errors, albeit measuring several millimeters only, was reported in Wujanz et al [
1]. On the contrary, this study specifically aims to investigate the relationship between intensity and distance errors caused by target specular reflection characteristics. The major contribution and innovation of this study are (i) a new method for determining the distance measurement errors caused by specular reflections directly from the original point cloud data and (ii) an intensity-based model for correcting the distance measurement errors from target specular reflections. The rest of this paper is organized as follows. The principles and methodology for correcting distance errors using intensity data are reviewed in
Section 2.
Section 3 outlines the materials and experiments.
Section 4 presents the results and validation of the proposed method, and the discussions and conclusions are presented in
Section 5 and
Section 6, respectively.
3. Materials and Experiments
The scanner adopted in this study was a Faro Focus
3D 120, which is an amplitude modulation continuous wave TLS. Faro Focus
3D 120 emits a laser beam from a rotating mirror toward the area being scanned. Then, the unit distributes the laser beam at a vertical range of 305° and a horizontal range of 360°. The laser beam is then reflected to the scanner by objects in its path. Together with the relative vertical and horizontal angles, the distance to the objects was calculated using the phase modulation technique. To measure the distance, Faro Focus
3D 120 uses phase shift technology, in which constant waves of infrared light of varying lengths are projected outward from the scanner [
8,
29]. In the phase-measuring technique used to measure distances, the output laser beam is split, and the amplitude is modulated to operate at three different wavelengths (i.e., 76, 9.6, and 1.2 m) [
42]. The distance from the scanner to the object is accurately determined by measuring the phase shift in the waves of the infrared light. The longest modulation wavelength defines the uniqueness range, and the shortest modulation wavelength defines the precision that can be obtained [
29]. The distance scale is 0.6–120 m indoors or outdoors, with low ambient light and normal incidence to a 90% reflective surface, and the distance error at 25 m is approximately 2 mm. The circular beam diameter at the exit is 3 mm, and the beam divergence was 0.16 mrad. Apart from the distance observations, the reflectivity of the captured surfaces is determined by the Faro Focus
3D 120 by measuring the intensity of the received laser beam. This reflectivity value, which is the intensity value, is recorded in 11 bits [0, 2048] for each single point.
To estimate the polynomial parameters and validate our proposed method, planar targets were used in this study. (i) The incidence angles of all points on the planar target were nearly near zero when the target was placed perpendicular to the scanner; thus, the influence of target specular reflections on the distance measurements could be explored well; (ii) The distance measurement errors of the planar targets could be easily and accurately determined using the method in
Section 2, and the true distance could be used to validate the prediction of the intensity-based model. The four reflective targets were made of different materials (
Figure 2): a desktop computer liquid crystal display screen (35 × 24 cm
2), a white ceramic tile (33 × 33 cm
2), an iron sheet coated with white paint (35 × 30 cm
2), and a gold-coated polyethylene panel (30 × 27 cm
2). Visually, the surfaces of these four targets were radiometrically homogeneous and geometrically smooth. The flatness was better than 2 mm. Four white sheets of note paper with size of 3 × 5 cm
2 were attached to the four corners of each surface. The surfaces of the paper sheets were relatively rough, and their specular reflections can be ignored. The distance measurement errors of the points of the paper sheets were subtle. Hence, the paper sheets could be used to determine the theoretical plane in a specific acquisition configuration. Given that the influence of the target specular reflections on intensity data are particularly strong at small incidence angles near zero, the four reflective planar targets were all scanned by the Faro Focus
3D 120 approximately at a normal incidence angle indoors. In the four scanning campaigns, the computer screen was placed on a table and the three other targets were fixed on a wall. The scanner was placed perpendicular to the center of the scanned target in all scanning campaigns. During the campaigns, the scan quality and resolution of the Faro Focus
3D 120 were set to 4 and 1/4, respectively. The distances from the scanner to the four targets were approximately 3, 10, 7, and 15 m. The points were manually sampled as fully as possible and exported to. xyz format in the standard software Faro SCENE 4.8 (FARO Technologies, Orlando, FL, USA). The surface data of the targets and paper sheets were separately exported. Then, the proposed method was tested and run in the MATLAB programming language.
4. Results
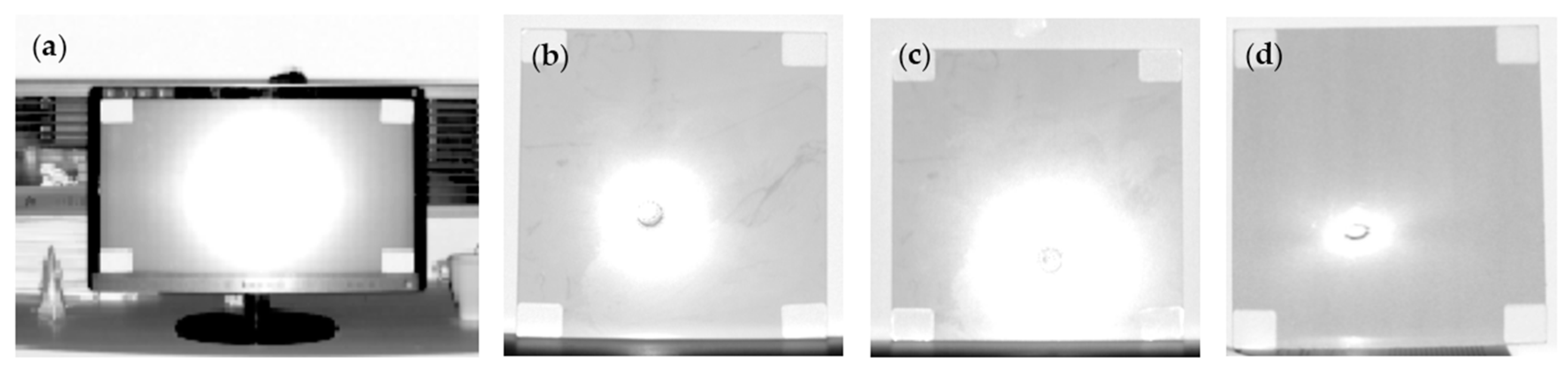
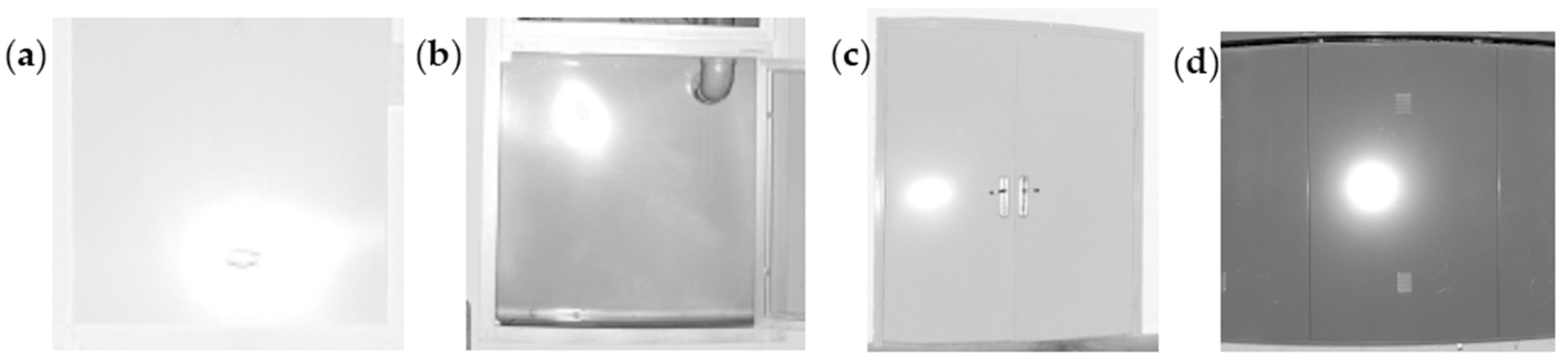
The original intensity images of the four targets created by Faro SCENE 4.8 are presented in
Figure 3. Bright regions exist at the centers of all the intensity images because specular reflections can cause highlight phenomena at normal incidence angles; i.e., the intensity data of the bright regions are higher than that of the rest of the parts although they belong to the same target and have the same reflectance characteristics. This result is highly consistent with the findings in Tan et al. [
22], and additional details about the principles of specular highlight phenomena can be found in Tan et al. [
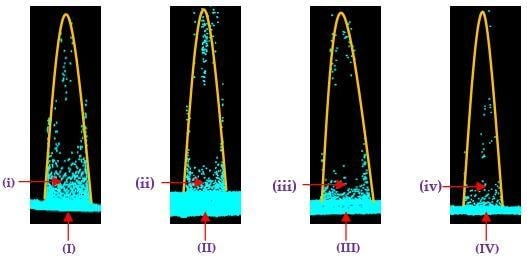
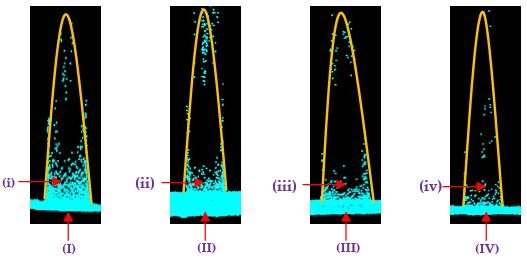
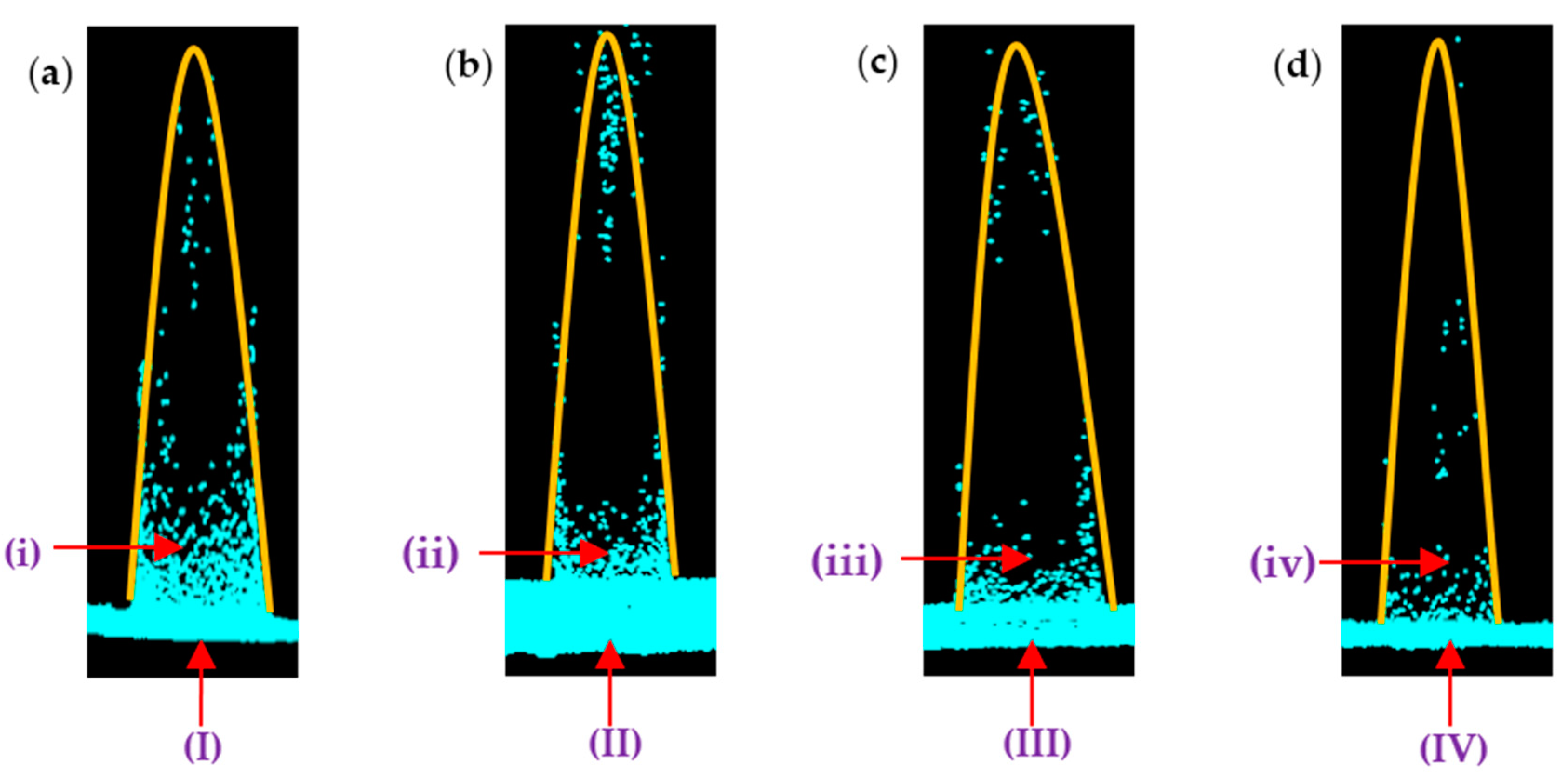
22]. To analyze the distance measurement errors, the point cloud of the highlighted regions was manually selected and exported. A 3D visualization of the selected points is shown in
Figure 4. The points of the bright regions deviate significantly from the theoretical plane. The closer a point to the center of the bright regions, the greater the distance deviation. The distance errors of the bright regions are not randomly distributed but have a specific behavior, as shown by the yellow fitting curves (cone) in
Figure 4. Additionally, some parts of the bright regions have no points because the extremely high amplitude of the backscattered signal causes a saturation effect of the photodetector. The saturation effect is related to the internal instrument mechanism and thus not discussed in this study. We can conclude that target specular reflections can simultaneously lead to intensity highlight phenomena, large distance measurement errors, and even the loss of point cloud.
To analyze the relationship between intensity and distance data quantitatively, the distance errors of all the points of the four targets are calculated according to Equation (7), where
,
, and
are estimated by least squares adjustment using the points of the paper sheets (
Table 1).
The distance error at 25 m is approximately 2 mm for Faro Focus
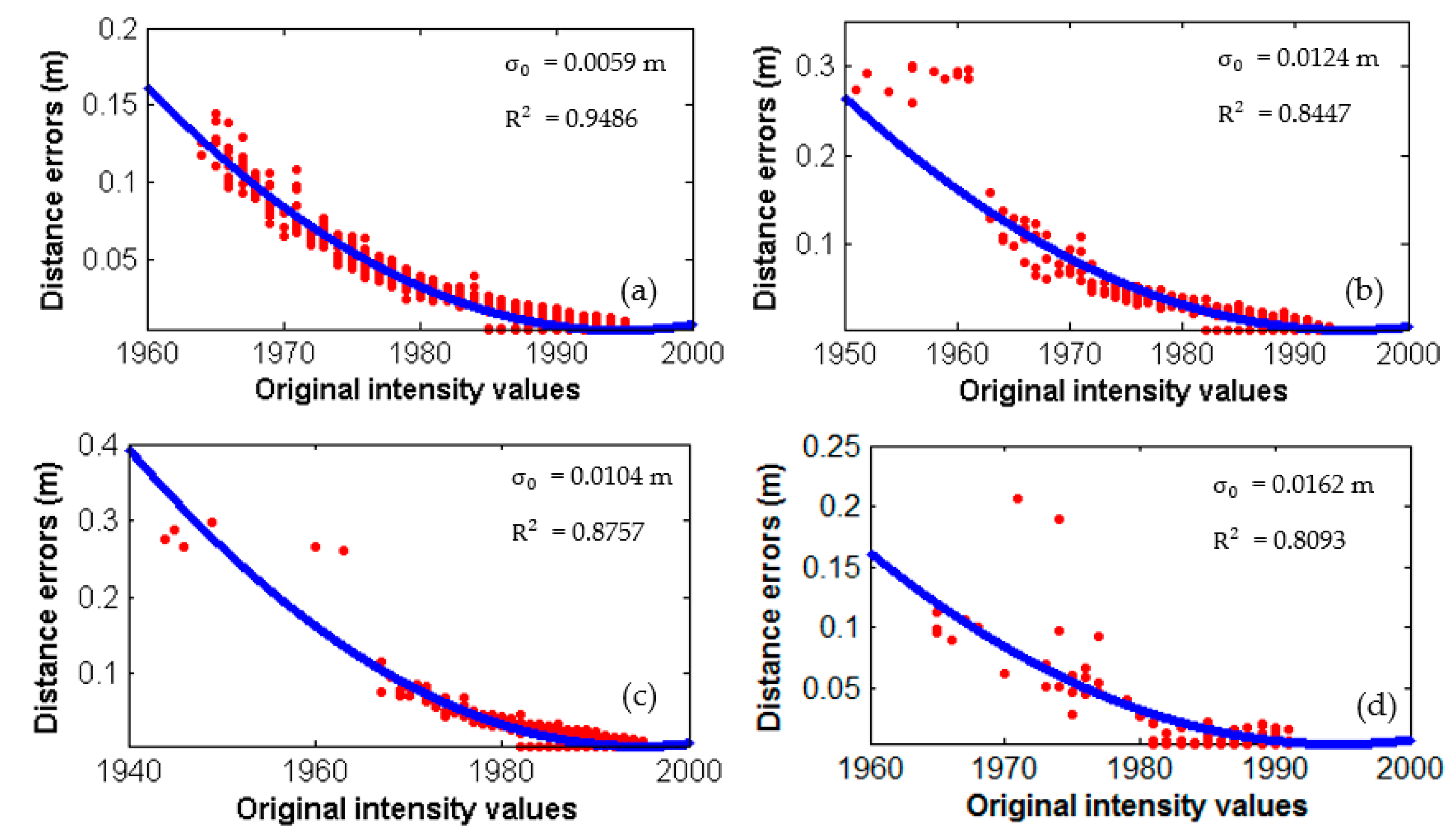
3D 120, and the flatness of all the planar targets is less than 2 mm. Considering other scanning noises, distance errors larger than 5 mm are empirically assumed abnormal and caused by the target specular reflections. A scatter plot between intensity data and distance errors (≥5 mm) is shown in
Figure 5. Unexpectedly, the largest distance measurement errors reach approximately 150, 300, 300, and 200 mm for the four targets; these errors exceed the scanner’s nominal accuracy. Furthermore, the distance errors decrease significantly from 400 mm to 5 mm with an increase in intensity data from 1940 to 2000. A visually strong relationship exists between the distance errors and the original intensity data. Notably, the relationship between the distance errors and the intensity of the four targets follow the same trend, regardless of target material and scanning geometry. With a test of the different orders of the polynomial and comparison of the fitting mean error
, where
is the residual vector and
is the number of points participating in the least squares adjustment, the cubic polynomial is proven the most suitable and accurate for the relationship between the intensity and distance errors, i.e.,
= 3. With the data in
Figure 5, the polynomial parameters are then estimated as shown in
Table 2. The curves of the polynomial are shown in
Figure 5. The values of
are 0.0059, 0.0124, 0.0104, and 0.0162 for
Figure 5a–d, respectively. The determination coefficients (
) are 0.9486, 0.8447, 0.8757, and 0.8093. The values of
and
indicate that the cubic curve fits the points well. The fitting results prove that there is indeed a mathematical relationship between the original intensity and the distance measurement errors and the original intensity can be used to compensate for the distance measurement errors.
5. Discussion and Validation
After the parameters in
Table 2 is obtained, Equation (11) could be used to compensate for the distance observations of other targets according to the intensity data. To validate the proposed method and the application to other surfaces further, four other planar targets were scanned by the Faro Focus
3D 120. These four targets were as follows: a polyvinyl chloride (PVC) sheet (35 × 35 cm
2), a paint steel plate (40 × 40 cm
2), a polished aluminum alloy door (200 × 180 cm
2), and a rubber advertising board (250 × 100 cm
2). The visual check of these four surfaces was materially homogeneous and geometrically planar. Similarly, the scanner was placed perpendicular to the center of the scanned target. The distances from the scanner to the four targets were approximately 6, 2, 15, and 18 m, respectively. The setting parameters of the scanner and the data processing method were the same as stated in
Section 3. The original intensity images of these four targets are shown in
Figure 6. Apparently, the phenomena of intensity highlight also occurred for these four surfaces.
The true distance measurement errors of these four targets could be calculated using Equation (7). Simultaneously, the distance error could be predicted by the original intensity and the estimated parameters in
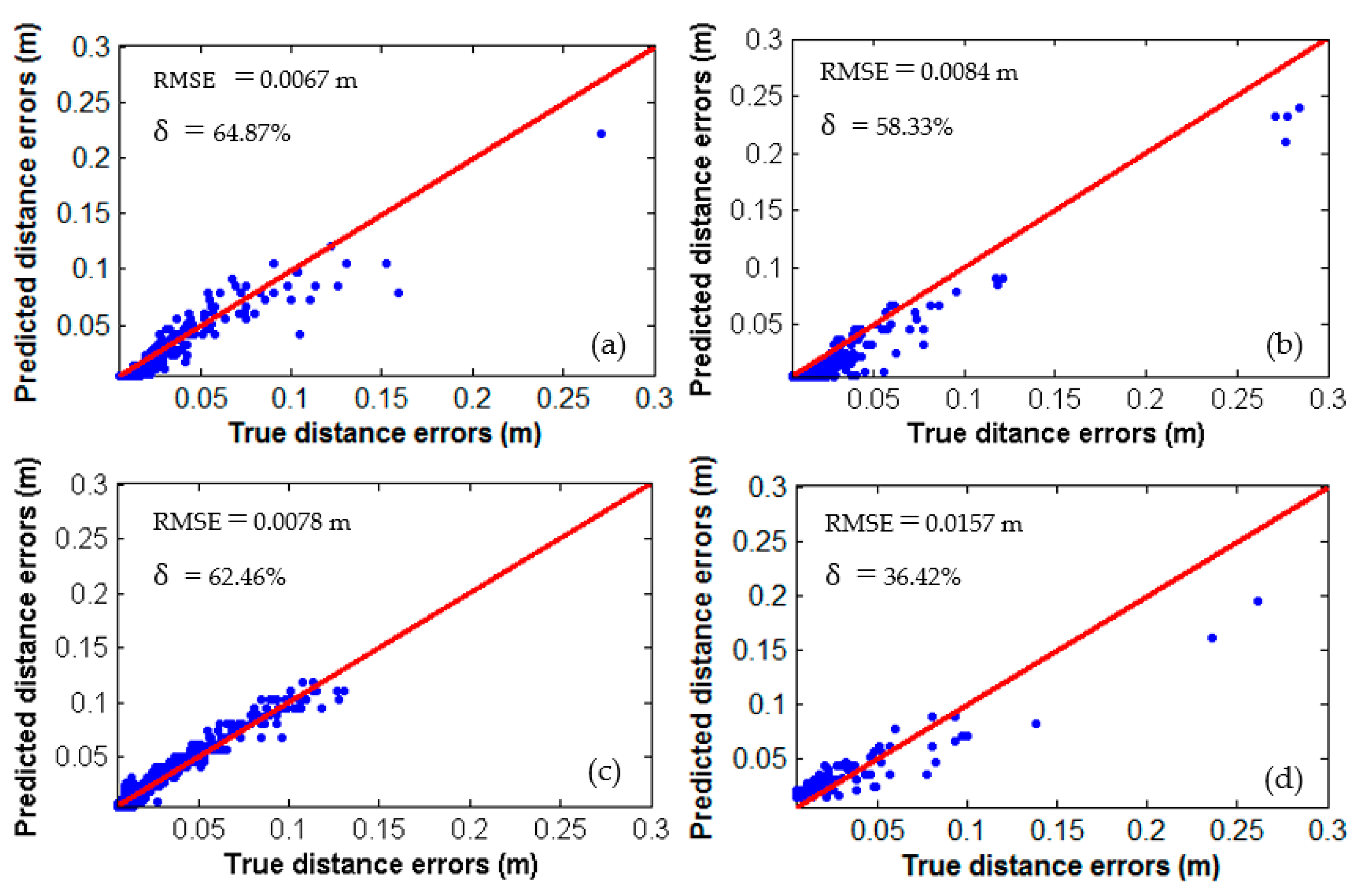
Table 2 using Equation (11). The proposed method could be validated further by comparing the true and predicted distance errors. Similarly, the distance errors larger than 5 mm were deemed caused by the target specular reflections. The relationship between the true and predicted distance errors are shown in
Figure 7. Visually, the points are all distributed around the red lines (
). This result means that the distance measurement errors predicted by the original intensity data were approximately equal to the true distance errors.
To evaluate the difference between the true and predicted distance errors quantitatively, the root mean square error (RMSE) was used, as shown by Equation (12). A small RMSE indicated a minor difference between the true and predicted distance errors, i.e., the original intensity could be used to predict the distance errors caused by the target specular reflections. The values of the RMSE were 0.0067, 0.0084, 0.0078, and 0.0157 for
Figure 7a–d, respectively. The mean value of the RMSE was 0.0097, which indicated that only small differences existed between the predicted and true distance errors.
where
is the true distance error of point
,
is the predicted distance errors of point
, and
is the total number of points.
After the predicted distance errors were obtained through the original intensity, a corrected distance (
) could be obtained by
. Consequently, the distance measurement accuracy could be improved. To evaluate the degree of accuracy improvement quantitatively, parameter
could be calculated for each point as shown by Equation (13). The mean values of
were 64.87%, 58.33%, 62.46%, and 36.42% for the points in
Figure 7a–d, respectively. This result indicated that the proposed method could improve the distance measurement accuracy by approximately 55.52%, i.e., a significant improvement of distance measurement could be obtained through the original intensity data.
Notably, shortened and lengthened effects occurred for the retro-reflective targets scanned by the Optech ILRIS 3D (Toronto, ON, Canada) terrestrial laser scanner in Pesci et al. [
10]. This result meant that the measured distance may be shorter or longer than the true distance due to the target specular reflections. However, the measured distances were all larger than the true distances in our study; i.e., only a lengthened effect was observed, possibly because the target specular reflections increased the fractional part of the phase difference (
) measurement, thus lengthening the distance observations. The shortened and lengthened effects are related to the waveform features of the backscattered signal and the algorithms adopted to calculate distance, which may vary by scanners. The specific reasons were unavailable due to the undisclosed instrument details and should be further investigated in future studies.
The targets were all scanned approximately at normal incidence angles in this study, which aimed to maximize the effect of target specular reflections on TLS intensity data and distance measurement errors. However, it should be noted that the specular reflections can also be received by the sensor at small incidence angles (≤45°) as reported by Tan et al. [
22]. We checked the results of the computer screen scanned at other four incidence angles, i.e., 8°, 15°, 52°, and 68°. Expectably, it was found that distance measurement errors still existed at small incidence angles (8° and 15°) but not as large as that at the normal incidence angle. On the contrary, no obvious distance measurement errors were observed for highly inclined incidence angles (52° and 68°). More comprehensive experiments and analysis need to be carried out on different targets scanned at various incidence angles in the future work.
Additionally, planar targets were used in this study to derive the relationship between distance errors and intensity. Theoretically, the derived relationship between intensity and distance errors is independent of the target shape and can be applied to irregular surfaces. However, the true distances of the scanned points on irregular surfaces are unavailable and hence the validation of the proposed method is difficult. Extensive experiments and analysis on irregular surfaces should be conducted in future studies to further validate the feasibility of the proposed method.
The Faro Focus3D 120 adopted in this study is a phase-shift-based scanner. In terms of time-of-fight scanners, the two-way time of flight is measured. Specular reflections will influence the system’s accurate measuring of the time delay, thereby causing distance measurement errors. The major difference between phase-shift-based and time-of-flight scanners is the method for distance measuring. Theoretically, the intensity data of the time-of-flight TLSs are also related to the distance measurement errors and can be used to eliminate the distance measurement errors. However, the application of the proposed method to time-of-fight scanners, particularly long-range ones, should be further tested and analyzed individually.
6. Conclusions
This study presents an intensity-based method for correcting the distance measurement errors caused by target specular reflections, thereby establishing a connection between the two types of data in TLS. Eight representative targets with different materials and surface characteristics scanned by the Faro Focus
3D 120 were selected to test the proposed method. Considering distance, incidence angle, and target characteristics individually is infeasible for modeling the distance errors. Therefore, the use of the intensity value is proposed for quantitatively modeling the distance errors based on the foundation that distance and intensity data are directly derived from the features of the backscattered signals. The most significant advantage of the proposed method is that no prior knowledge about the reflectance of the scanned target, scanning geometry, and instrument mechanism is required. The effects of distance, incidence angle, and target reflectance on distance measurement errors can be substituted by one original observation, i.e., intensity. Results indicate that the distance measurement accuracy can be improved significantly after establishing the function between intensity and distance errors, which is of great importance to TLS data quality, reliability, and subsequent processing. Additionally, target specular reflections can lead to intensity highlight phenomena [
19,
22]. The proposed method can provide accurate distance information for the estimation of the incidence angle. Thus, the effects of distance and incidence angle on the intensity highlight phenomena can be accurately eliminated for target classification, segmentation, and feature extraction. Given that specular reflections are dominant in many targets, such as fresh ice, water, foliage, mineral rocks, subway pipelines, transportation facilities, and building materials [
20,
21], the proposed method has great potential for improving data quality and accuracy in TLS. Although good results were obtained for the selected targets in this study, extensive testing should be carried out along with the analysis of the sensitivity on target material, scanning geometry, and other factors that may influence the proposed method to draw some generalizing conclusions.
Instrument details of TLS often remain undisclosed by manufacturers. Thus, a polynomial is used to approximate the relationship between intensity and distance measurement errors in this study. The proposed method can be improved if additional optical and electronic details are available. Furthermore, we empirically consider that distance errors larger than 5 mm are caused by specular reflections. An increasingly accurate isolation of the distance errors caused by specular reflections is required in future studies. Apart from the intensity highlight phenomena and the distance measurement errors, target specular reflections can lead to photodetector saturation and point cloud data loss because the extremely high amplitude of the backscattered signals exceeds the threshold of the photodetector and invalidates the measurements. No data exist when saturation occurs. Additionally, the shortened and lengthened distance measurement effects should be investigated by a physical analysis of the specific algorithms adopted to calculate distance. These topics are not discussed in this paper and need further investigation.









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}