A Compensation Method for Airborne SAR with Varying Accelerated Motion Error


Abstract
1. Introduction
2. Best Linear Unbiased Estimation
2.1. Why BLUE Works
2.2. Blocks of Proposed Algorithm
3. Experiment Results and Discussion
3.1. Simulation Data Processing
3.1.1. Intensive Accelerated Motion Error
3.1.2. Mild Accelerated Motion Error
3.1.3. Burst-Like Perturbations
3.2. Real Data Processing
4. Discussion
4.1. Impact of the Two-Step Residual Error
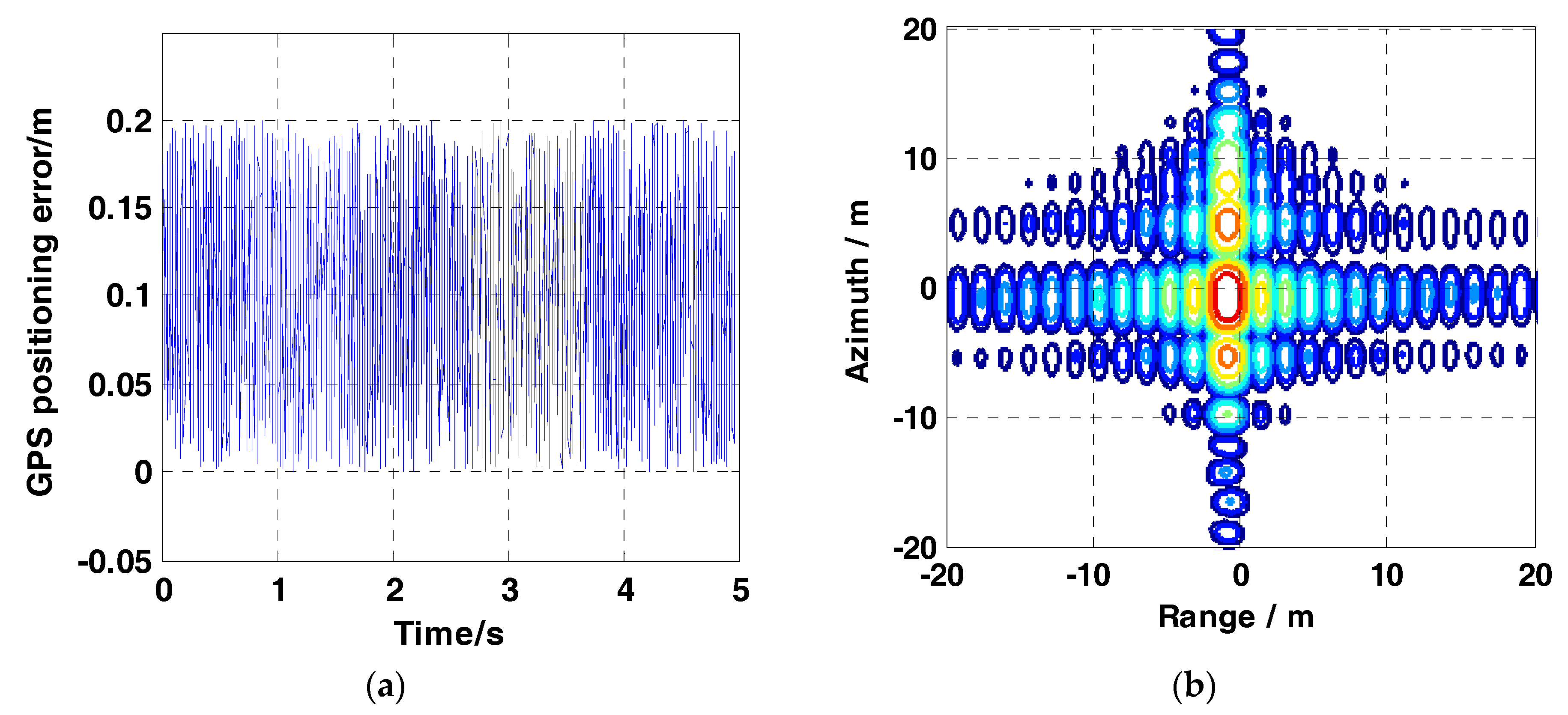
4.2. Impact of Positioning Error
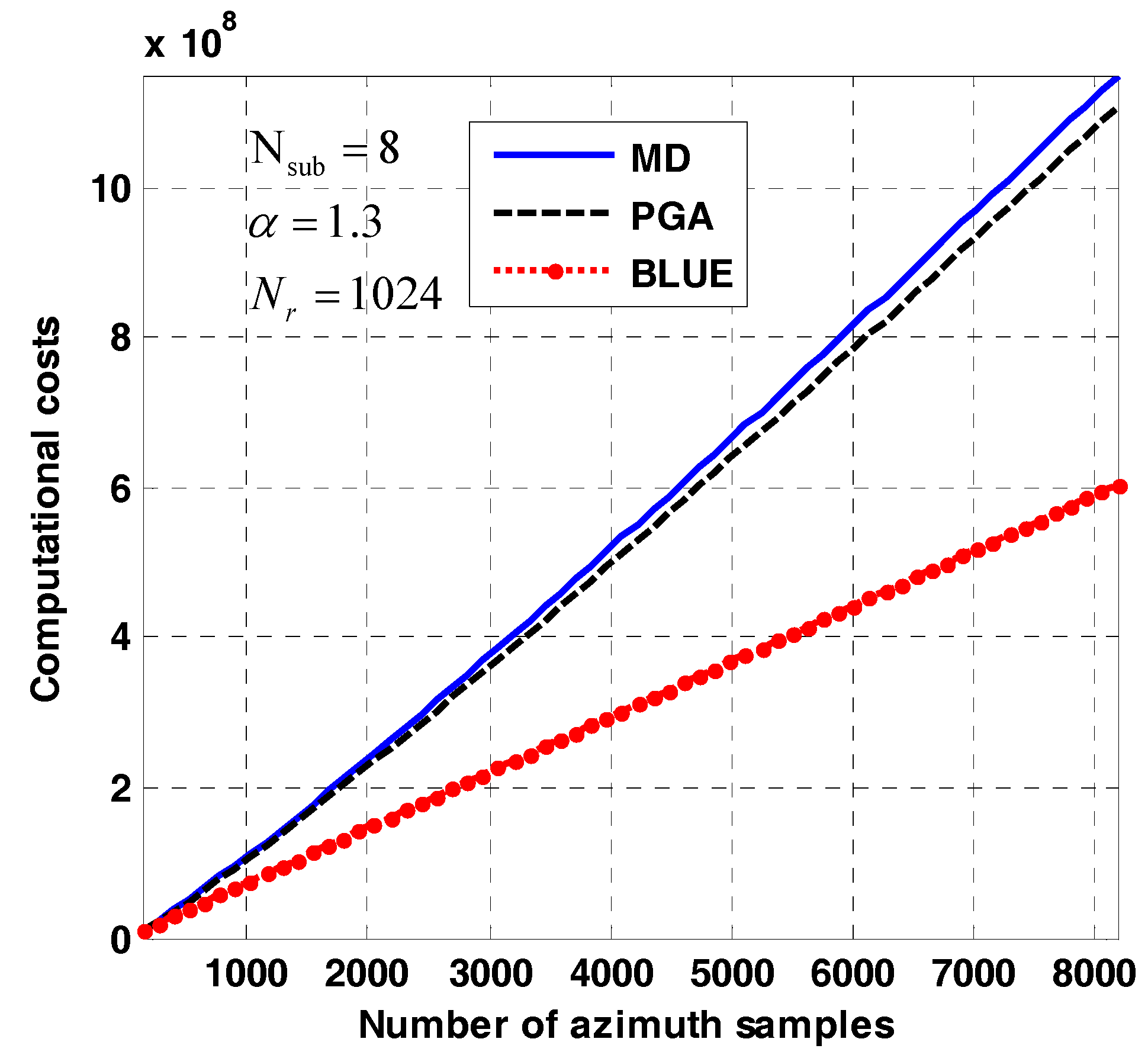
4.3. Comparison of the Computational Cost
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Appendix A
References
- Prats, P.; Scheiber, R.; Mittermayer, J.; Meta, A.; Moreira, A. Processing of Sliding Spotlight and TOPS SAR Data Using Baseband Azimuth Scaling. IEEE Trans. Geosci. Remote Sens. 2010, 48, 770–780. [Google Scholar] [CrossRef]
- Xu, Z.; Chen, K.S. On Signal Modeling of Moon-Based Synthetic Aperture Radar (SAR) Imaging of Earth. Remote Sens. 2018, 10, 486. [Google Scholar] [CrossRef]
- Zhang, S.; Xu, Q.; Zheng, Q.; Li, X. Mechanisms of SAR Imaging of Shallow Water Topography of the Subei Bank. Remote Sens. 2017, 9, 1203. [Google Scholar] [CrossRef]
- Fornaro, G. Trajectory Deviations in Airborne SAR: Analysis and Compensation. IEEE Trans. Aerosp. Electron. Syst. 1999, 35, 997–1009. [Google Scholar] [CrossRef]
- Shi, J.; Ma, L.; Zhang, X. Streaming BP for Non-Linear Motion Compensation SAR Imaging Based on GPU. IEEE J. Sel. Top Appl. Earth Observ. Remote Sens. 2013, 6, 2035–2050. [Google Scholar]
- Moreira, J.R. A New Method of Aircraft Motion Error Extraction from Radar Raw Data for Real Time Motion. IEEE Trans. Geosci. Remote Sens. 1990, 28, 620–626. [Google Scholar] [CrossRef]
- Zhang, L.; Hu, M.; Wang, G.; Wang, H. Range-Dependent Map-Drift algorithm for Focusing UAV SAR Imagery. IEEE Geosci. Remote. Sens. Lett. 2016, 13, 1158–1162. [Google Scholar] [CrossRef]
- Wahl, D.E.; Jakowatz, C.V.; Thompson, P.A.; Ghiglia, D.C. New Approach to Strip-map SAR Autofocus. In Proceedings of the IEEE 6th Digital Signal Processing Workshop, Yosemite National Park, CA, USA, 2–5 October 1994; pp. 53–56. [Google Scholar]
- Eichel, P.H.; Ghiglia, D.C.; Jakowatz, C.V. Speckle processing method for synthetic-aperture-radar phase correction. Optics Lett. 1989, 14, 1–3. [Google Scholar] [CrossRef]
- Xiong, T.; Xing, M.; Wang, Y.; Wang, S.; Sheng, J.; Guo, L. Minimum-Entropy-Based Autofocus Algorithm for SAR Data Using Chebyshev Approximation and Method of Series Reversion and Its Implementation in a Data Processor. IEEE Trans. Geosci. Remote Sens. 2014, 52, 1719–1728. [Google Scholar] [CrossRef]
- Kay, S.M. Fundamentals of Statistical Signal Processing: Estimation Theory; Prentice Hall: Englewood Cliffs, NJ, USA, 1993. [Google Scholar]
- Meta, A.; Prats, P.; Steinbrecher, U.; Mittermayer, J.; Scheiber, R. TerraSAR-X TOPSAR and ScanSAR comparison. In Proceedings of the 7th European Conference on Synthetic Aperture Radar, Friedrichshafen, Germany, 2–5 June 2008. [Google Scholar]
- Meta, A.; Mittermayer, J.; Prats, P.; Scheiber, R.; Steinbrecher, U. TOPS Imaging with TerraSAR-X: Mode Design and Performance Analysis. IEEE Trans. Geosci. Remote Sens. 2010, 48, 759–769. [Google Scholar] [CrossRef]
- Xing, M.; Jiang, X.; Wu, R.; Zhou, F.; Bao, Z. Motion Compensation for UAV SAR Based on Raw Data. IEEE Trans. Geosci. Remote Sens. 2009, 47, 2870–2883. [Google Scholar] [CrossRef]
- Kou, K.H.; Zhang, Y.A.; Liu, A.L. Vision-aided INS fast localization error modification method for cruise missiles. Syst. Eng. Electron. 2013, 35, 397–401. [Google Scholar]





























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Values |
|---|---|
| Center Frequency | 9.6 GHz |
| Bandwidth | 100 MHz |
| Sampling Frequency | 120 MHz |
| Antenna Size (azimuth × range) | 2m × 1m |
| Scene Size (azimuth × range) | 1 km × 1 km |
| Sensor Velocity | 150 m/s |
| Height | 9 km |
| Incidence Angle | 76.99° |
| Pulse Repeat Frequency (PRF) | 300 Hz |
| Pulse Width | 30 us |
| Center Slant Range | 40 km |
| Antenna Azimuth Pattern | Sinc(•) |
| Motion Error Amplitude | [2 m, 1 m, 2 m] |
| Motion Error rate | |
| Swath Length | 1 km |
| Echo Acquired Mode | Strip-map |
| Scene Type | Images Processed by Different Algorithm | Entropy Values |
|---|---|---|
| Strong backscatters | Origin | 6.5928 |
| MD | 6.5262 | |
| PGA | 6.4922 | |
| BLUE | 6.4694 | |
| Homogeneous backscatters | Origin | 7.0883 |
| MD | 7.0739 | |
| PGA | 7.0080 | |
| BLUE | 6.9579 |
| Parameters | Value |
|---|---|
| GPS error distribution | random noise |
| GPS error magnitude | 0.2 m |
| INS error distribution | quadratic function |
| Algorithms | Computational Costs |
|---|---|
| MD | |
| PGA | |
| BLUE |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yi, T.; He, Z.; He, F.; Dong, Z.; Wu, M.; Song, Y. A Compensation Method for Airborne SAR with Varying Accelerated Motion Error. Remote Sens. 2018, 10, 1124. https://doi.org/10.3390/rs10071124
Yi T, He Z, He F, Dong Z, Wu M, Song Y. A Compensation Method for Airborne SAR with Varying Accelerated Motion Error. Remote Sensing. 2018; 10(7):1124. https://doi.org/10.3390/rs10071124
Chicago/Turabian StyleYi, Tianzhu, Zhihua He, Feng He, Zhen Dong, Manqing Wu, and Yongping Song. 2018. "A Compensation Method for Airborne SAR with Varying Accelerated Motion Error" Remote Sensing 10, no. 7: 1124. https://doi.org/10.3390/rs10071124
APA StyleYi, T., He, Z., He, F., Dong, Z., Wu, M., & Song, Y. (2018). A Compensation Method for Airborne SAR with Varying Accelerated Motion Error. Remote Sensing, 10(7), 1124. https://doi.org/10.3390/rs10071124