A Spatial-Temporal Adaptive Neighborhood-Based Ratio Approach for Change Detection in SAR Images



Abstract
:1. Introduction
2. Methods
2.1. INR
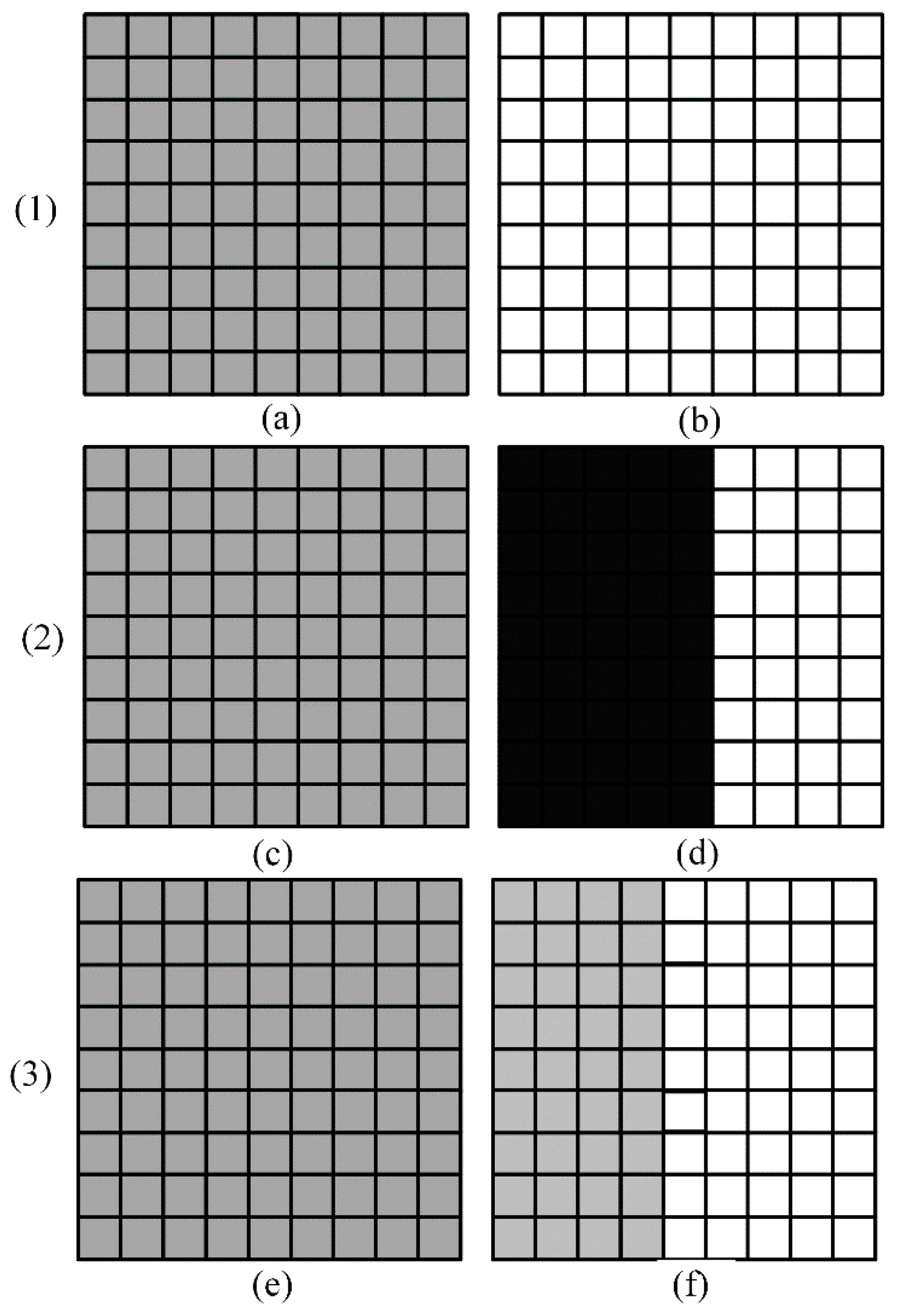
2.2. Spatial Adaptive Window
| Algorithm 1: Spatial adaptive window |
| Begin |
| (1) Set the minimum window and the maximum window . There are = ( − )/2 + 1 different sizes of windows. |
| (2) Set the heterogeneity threshold . If the heterogeneity of a window is smaller than , then this window is treated as a homogeneous window. |
| (3) Set current window . |
| (4) Compute the heterogeneity of the current window. If < , go to Step (6); otherwise, go to Step (5). |
| (5) If , go to Step (6); otherwise, , go to Step (4). |
| (6) Save the optimal window of the current center pixel. If the current pixel is not the last pixel, move to the next pixel, and continue from Step (3); otherwise, the adaptive window of the entire image has been calculated, therefore, go to End. |
| End |
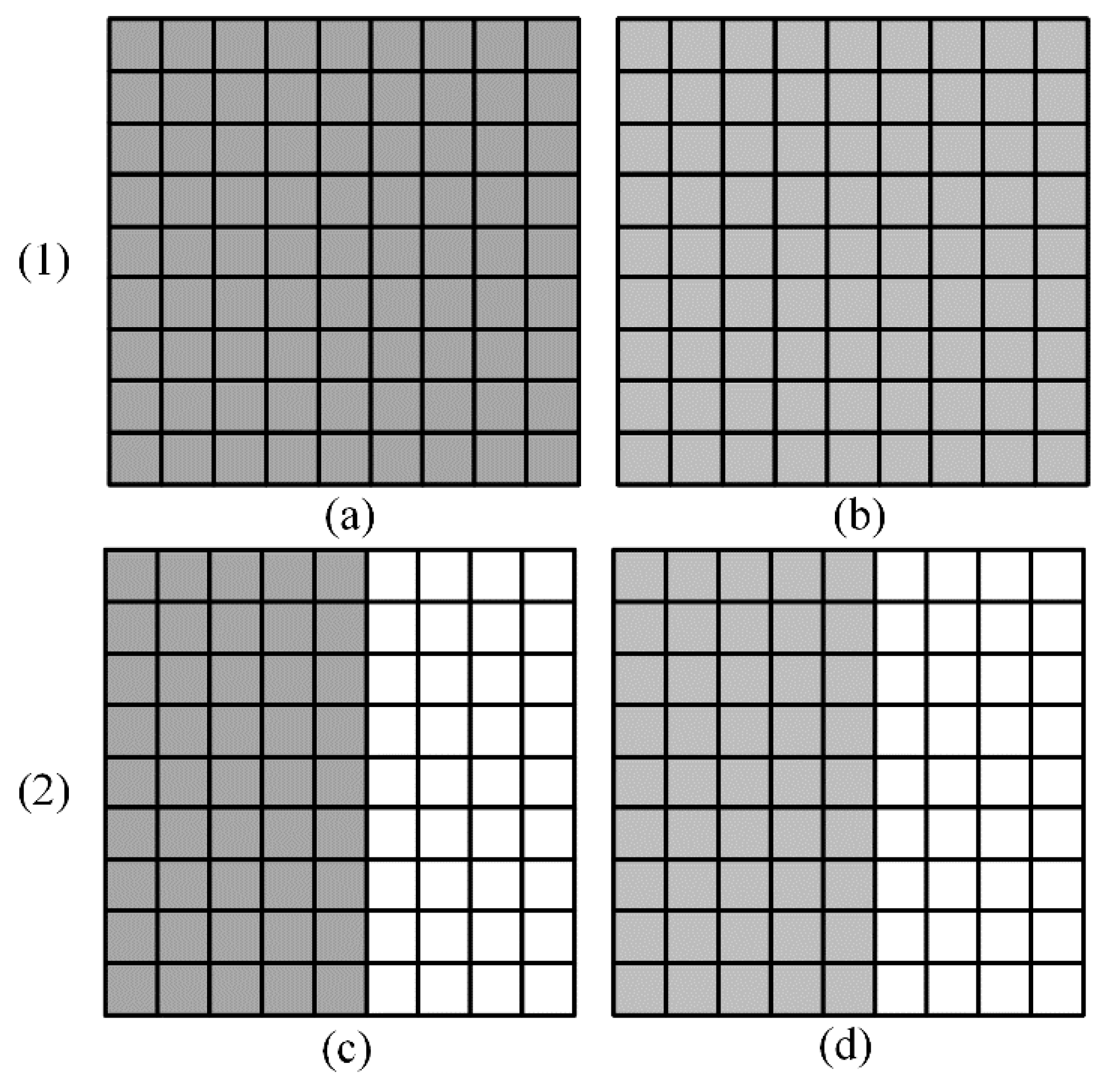
2.3. Temporal Adaptive Window
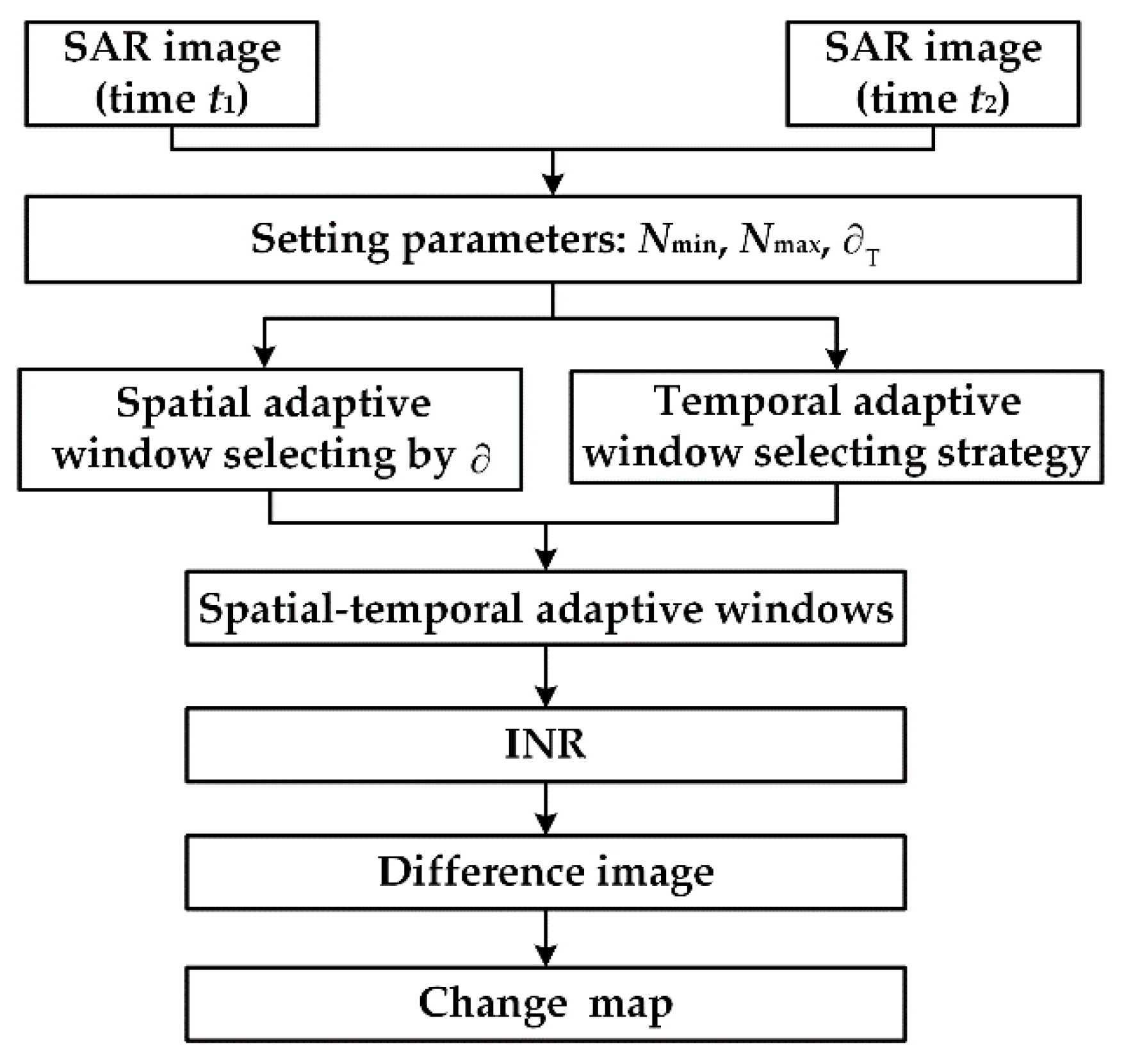
2.4. STANR
| Algorithm 2: STANR |
| Begin |
| (1) Set the minimum window and the maximum window . There are = ( − )/2 + 1 different sizes of windows. |
| (2) Set the heterogeneity threshold . If the heterogeneity of a window is smaller than , then this window is treated as a homogeneous window. |
| (3) On the basis of spatial-temporal adaptive window selecting strategy, compute the adaptive windows and of multi-temporal SAR images with Algorithm 1. |
| (4) On the basis of the adaptive windows and , compute the heterogeneity maps and of multi-temporal SAR images, and normalize them to [0, 1] by using Equation (3) to get the normalizing heterogeneity maps and . |
| (5) Compute the neighborhood-based ratio difference with Equation (2) for each pixel pair of multi-temporal SAR images. |
| End |
3. Experiments and Results
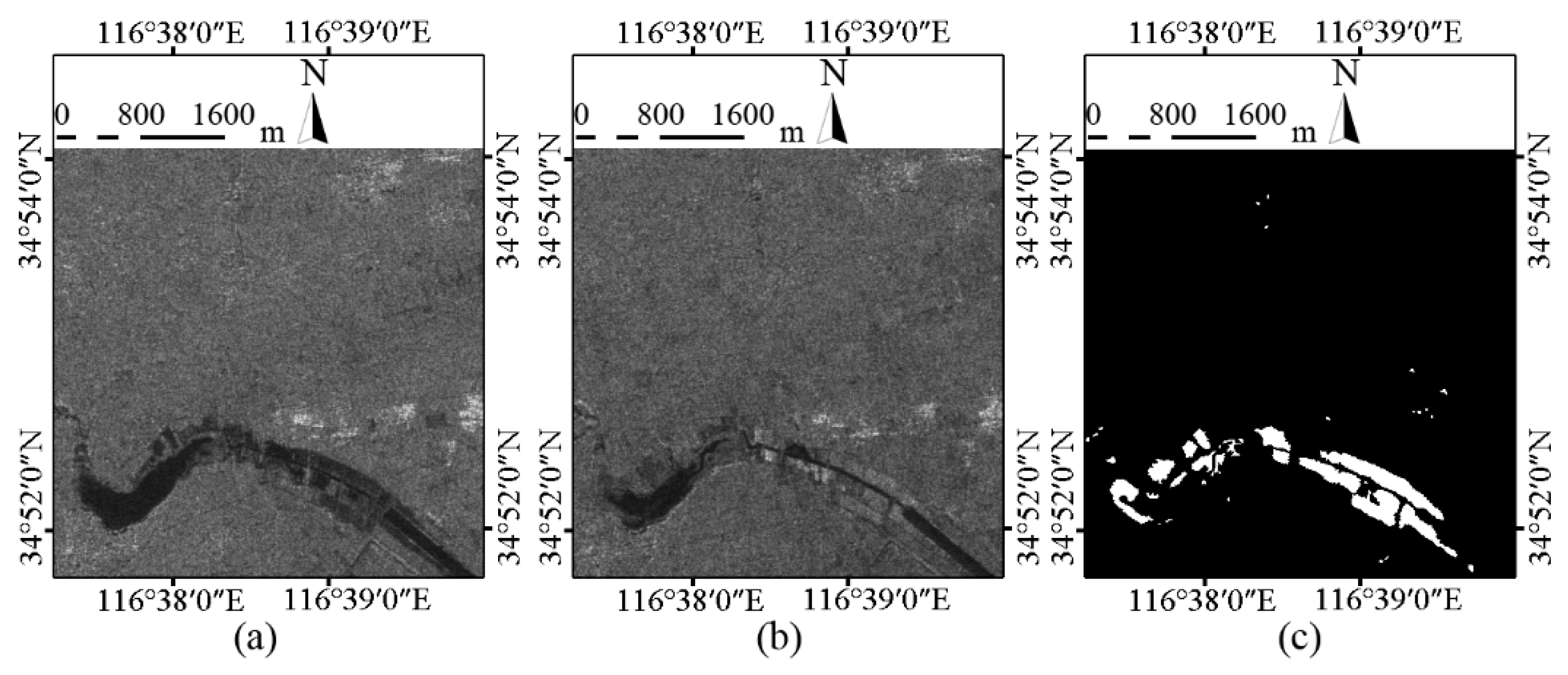
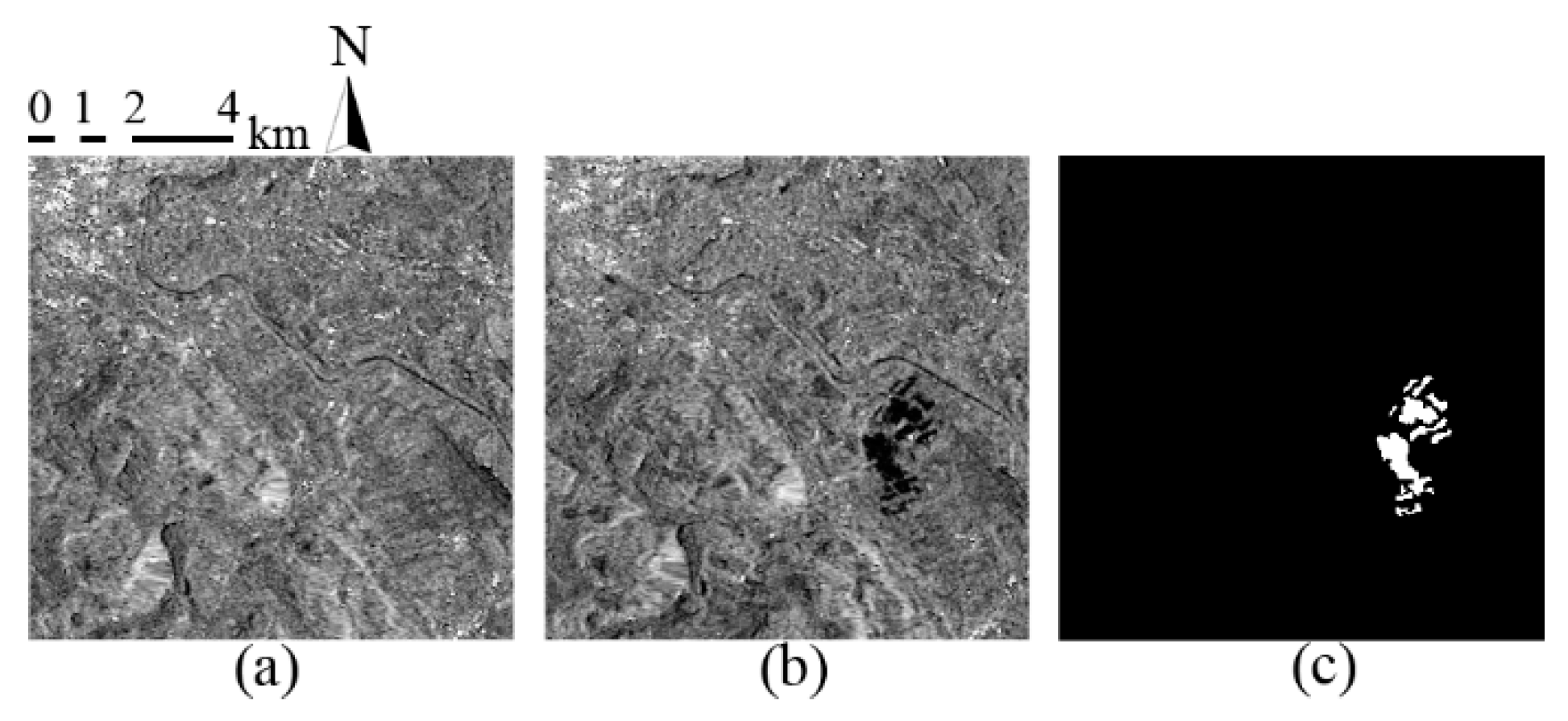
3.1. Description of Data Sets
3.2. Experimental Design
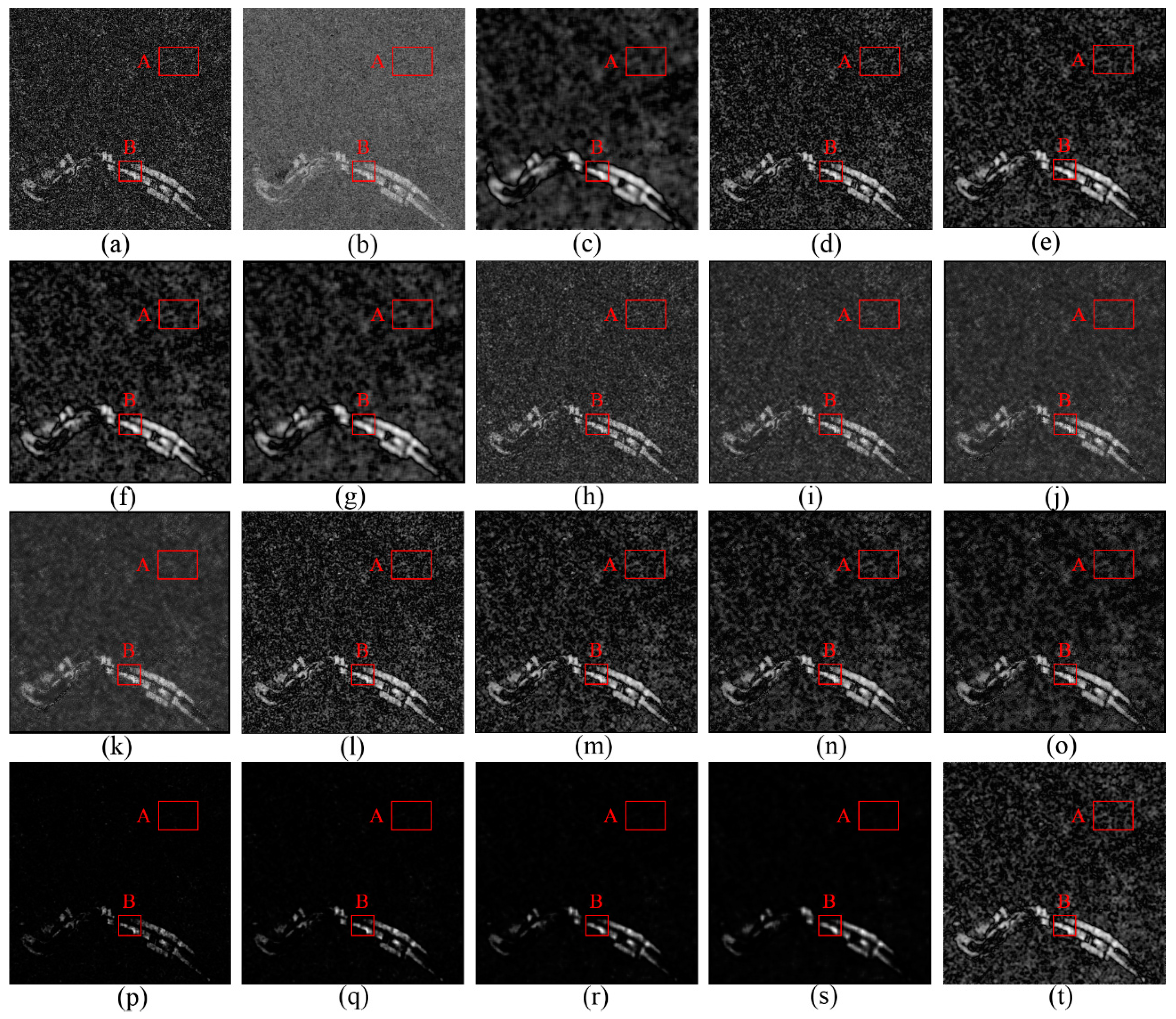
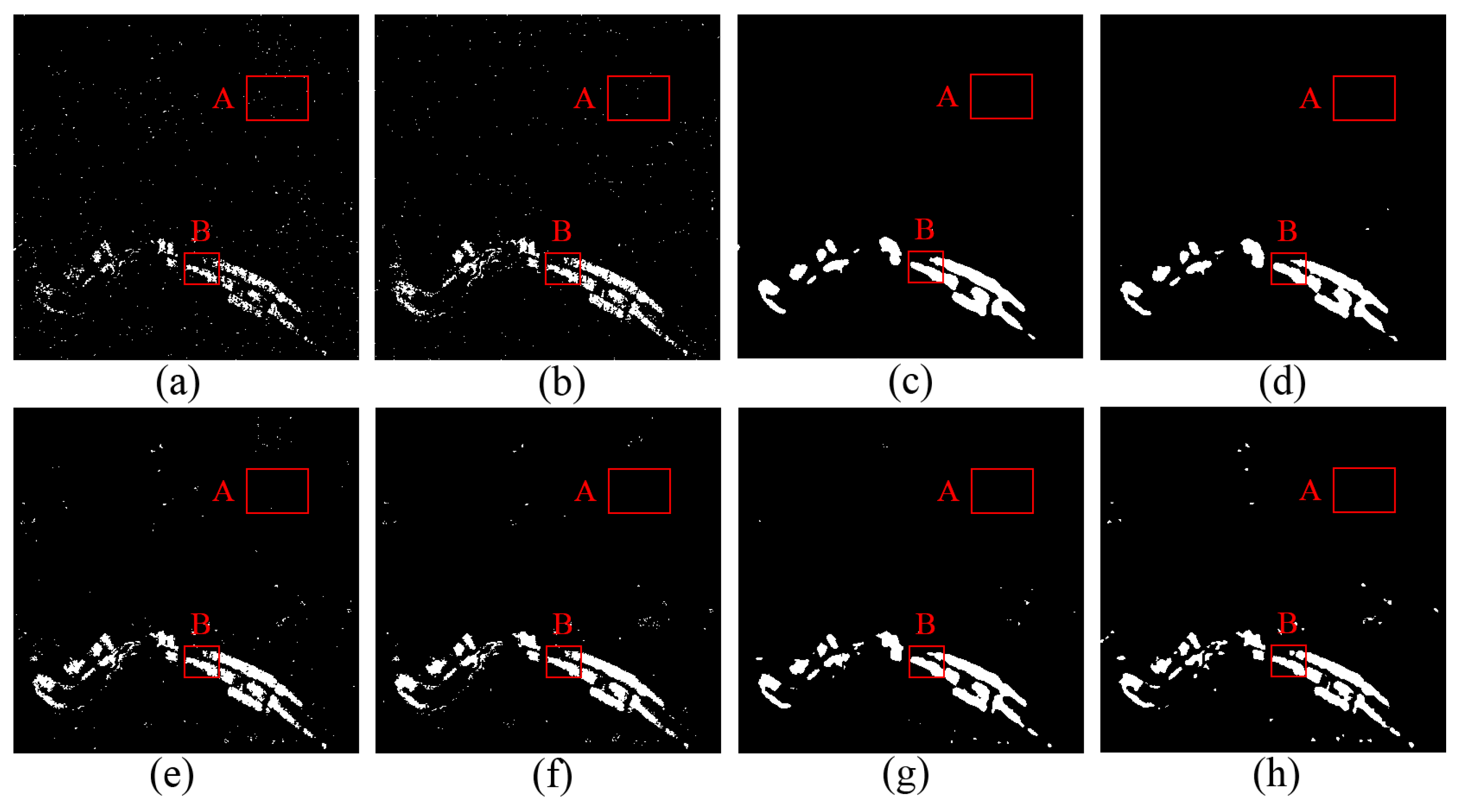
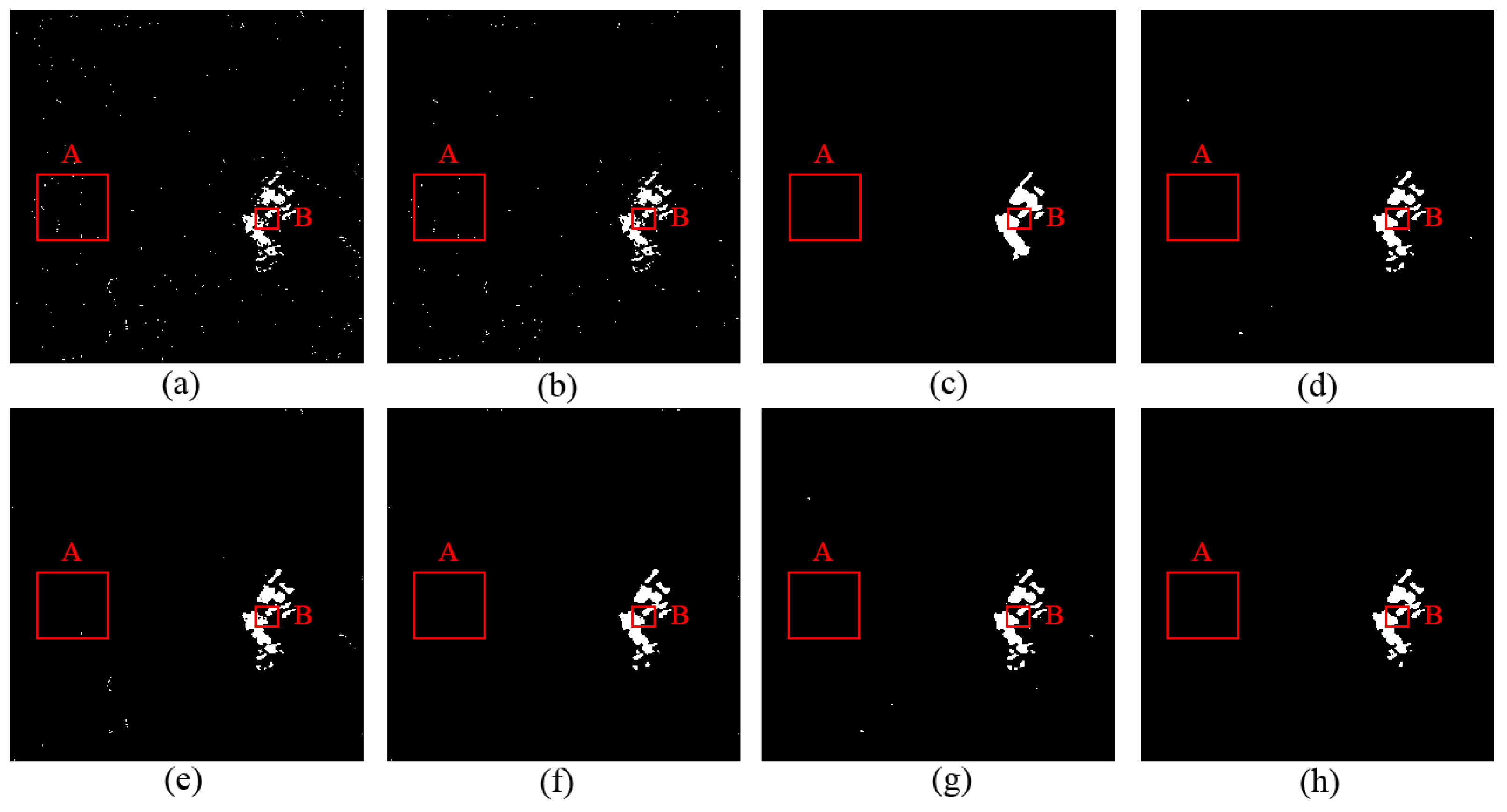
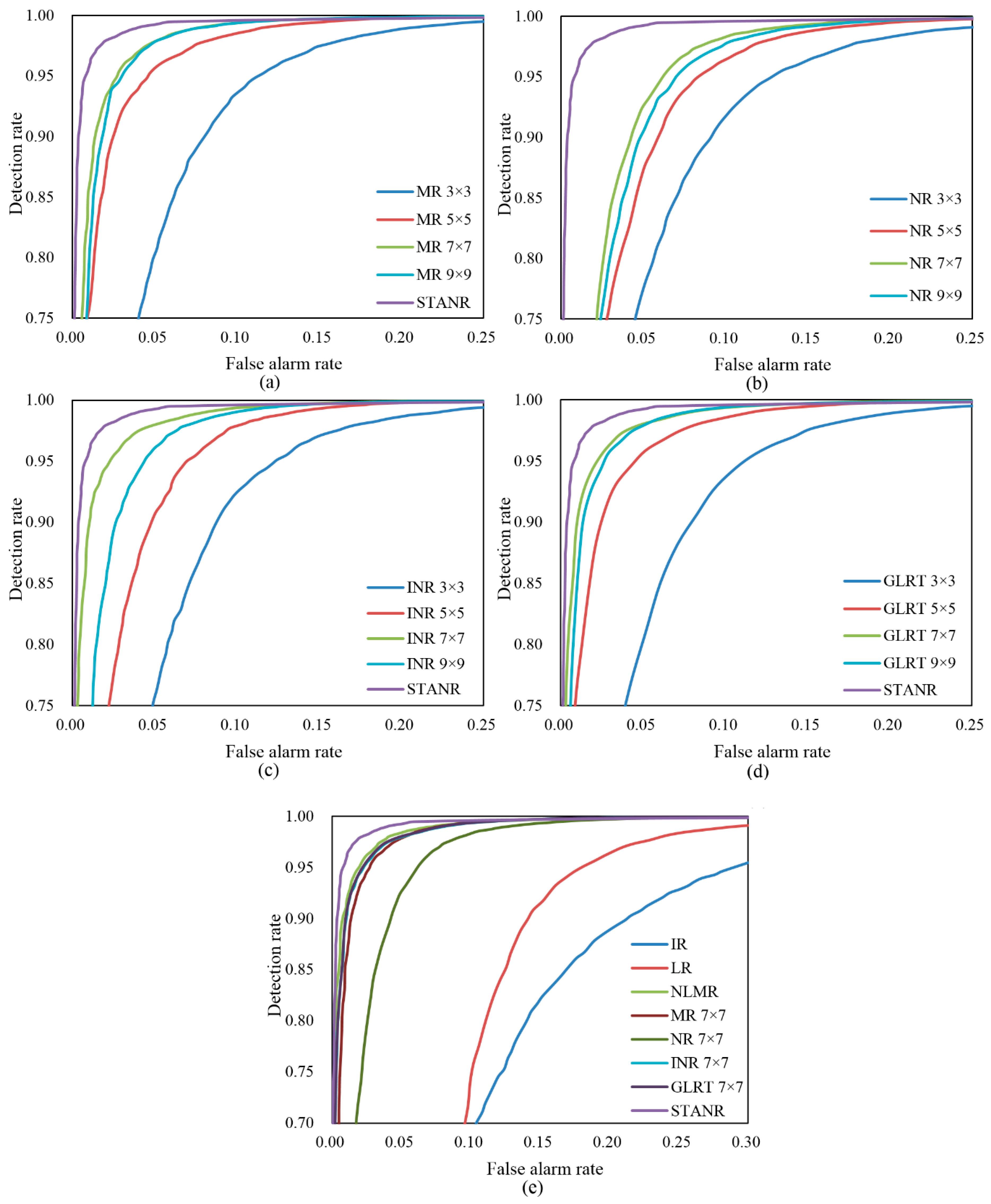
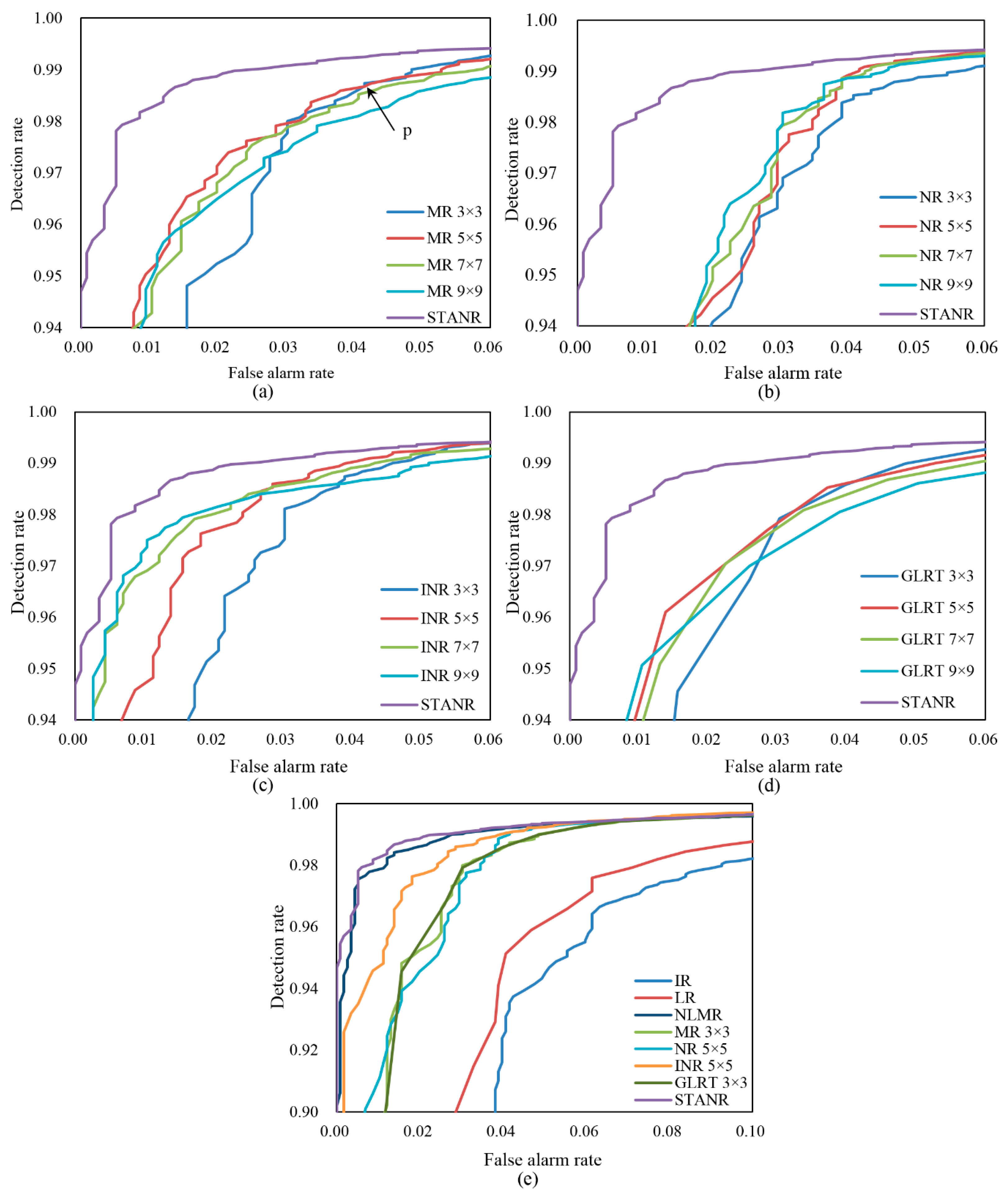
3.3. Experimental Results on Peixian Data Set
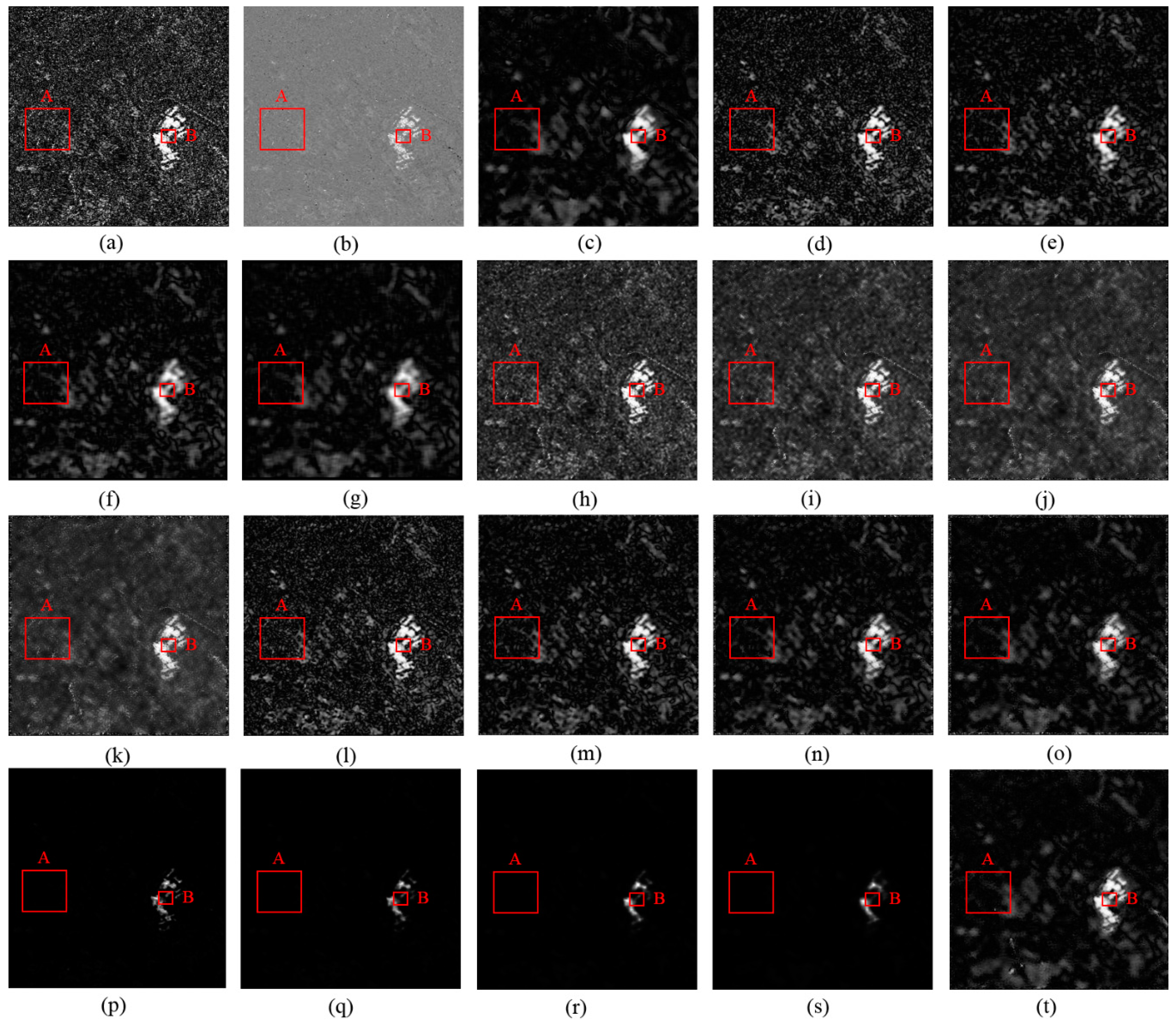
3.4. Experimental Results on Bern Data Set
4. Discussion
4.1. Discussion on Experimental Results of Peixian Data Set
4.2. Discussion of Experimental Results of Bern Data Set
4.3. Discussion of the Study
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Bruzzone, L.; Prieto, D.F. Automatic analysis of the difference image for unsupervised change detection. IEEE Trans. Geosci. Remote Sens. 2000, 38, 1171–1182. [Google Scholar] [CrossRef]
- Zhuang, H.; Deng, K.; Fan, H.; Yu, M. Strategies combining spectral angle mapper and change vector analysis to unsupervised change detection in multispectral images. IEEE Geosci. Remote Sens. Lett. 2016, 13, 681–685. [Google Scholar] [CrossRef]
- Zhuang, H.; Deng, K.; Yu, Y.; Fan, H. An approach based on discrete wavelet transform to unsupervised change detection in multispectral images. Int. J. Remote Sens. 2017, 38, 4914–4930. [Google Scholar] [CrossRef]
- Shi, W.; Qin, K.; Chen, J.; Zhang, P.; Yu, Y.; Zhang, X.; Hu, Q.; Huang, C.; Yu, C.; Zhang, W. Key theories and technologies on reliable dynamic monitoring for national geographical state. Chin. Sci. Bull. 2012, 57, 2239–2248. [Google Scholar] [CrossRef]
- Gong, M.; Cao, Y.; Wu, Q. A neighborhood-based ratio approach for change detection in SAR images. IEEE Geosci. Remote Sens. Lett. 2012, 9, 307–311. [Google Scholar] [CrossRef]
- Satyabala, S.P. Spatiotemporal variations in surface velocity of the Gangotri glacier, Garhwal Himalaya, India: Study using synthetic aperture radar data. Remote Sens. Environ. 2016, 181, 151–161. [Google Scholar] [CrossRef]
- Fan, H.; Xu, Q.; Hu, Z.; Du, S. Using temporarily coherent point interferometric synthetic aperture radar for land subsidence monitoring in a mining region of western China. J. Appl. Remote Sens. 2017, 11, 026003. [Google Scholar] [CrossRef]
- Mason, D.C.; Trigg, M.A.; Garciapintado, J.; Cloke, H.L.; Neal, J.C.; Bates, P.D. Improving the tanDEM-X digital elevation model for flood modelling using flood extents from synthetic aperture radar images. Remote Sens. Environ. 2016, 173, 15–28. [Google Scholar] [CrossRef]
- Hasager, C.B.; Badger, M.; Peña, A.; Larsén, X.G.; Bingöl, F. SAR-based wind resource statistics in the Baltic sea. Remote Sens. 2011, 3, 117–144. [Google Scholar] [CrossRef] [Green Version]
- Hachicha, S.; Chaabane, F. On the SAR change detection review and optimal decision. Int. J. Remote Sens. 2014, 35, 1693–1714. [Google Scholar] [CrossRef]
- Marin, C.; Bovolo, F.; Bruzzone, L. Building change detection in multitemporal very high resolution SAR images. IEEE Trans. Geosci. Remote Sens. 2015, 53, 2664–2682. [Google Scholar] [CrossRef]
- Li, Y.; Martinis, S.; Plank, S.; Ludwig, R. An automatic change detection approach for rapid flood mapping in Sentinel-1 SAR data. Int. J. Appl. Earth Obs. Geoinf. 2018, 73, 123–135. [Google Scholar] [CrossRef]
- Zhuang, H.; Fan, H.; Deng, K.; Yu, Y. An improved neighborhood-based ratio approach for change detection in SAR images. Eur. J. Remote Sens. 2018, 51, 723–738. [Google Scholar] [CrossRef]
- Argenti, F.; Alparone, L. Speckle removal from SAR images in the undecimated wavelet domain. IEEE Trans. Geosci. Remote Sens. 2002, 40, 2363–2374. [Google Scholar] [CrossRef]
- Touzi, R. A review of speckle filtering in the context of estimation theory. IEEE Trans. Geosci. Remote Sens. 2002, 40, 2392–2404. [Google Scholar] [CrossRef]
- Rignot, E.J.M.; Van Zyl, J.J. Change detection techniques for ERS-1 SAR data. IEEE Trans. Geosci. Remote Sens. 1993, 31, 896–906. [Google Scholar] [CrossRef] [Green Version]
- Singh, A. Review article digital change detection techniques using remotely sensed data. Int. J. Remote Sens. 1989, 10, 989–1003. [Google Scholar] [CrossRef]
- Oliver, C.; Quegan, S. Understanding Synthetic Aperture Radar Images; SciTech Publishing: Raleigh, NC, USA, 2004. [Google Scholar]
- Celik, T. A Bayesian approach to unsupervised multiscale change detection in synthetic aperture radar images. Signal Process. 2010, 90, 1471–1485. [Google Scholar] [CrossRef]
- Bovolo, F.; Marin, C.; Bruzzone, L. A hierarchical approach to change detection in very high resolution SAR images for surveillance applications. IEEE Trans. Geosci. Remote Sens. 2013, 51, 2042–2054. [Google Scholar] [CrossRef]
- Inglada, J.; Mercier, G. A new statistical similarity measure for change detection in multitemporal SAR images and its extension to multiscale change analysis. IEEE Trans. Geosci. Remote Sens. 2007, 45, 1432–1445. [Google Scholar] [CrossRef]
- Lopes, A.; Touzi, R.; Nezry, E. Adaptive speckle filters and scene heterogeneity. IEEE Trans. Geosci. Remote Sens. 1990, 28, 992–1000. [Google Scholar] [CrossRef]
- Lang, F.; Yang, J.; Li, D. Adaptive-window polarimetric SAR image speckle filtering based on a homogeneity measurement. IEEE Trans. Geosci. Remote Sens. 2015, 53, 5435–5446. [Google Scholar] [CrossRef]
- Anfinsen, S.N.; Doulgeris, A.P.; Eltoft, T. Estimation of the equivalent number of looks in polarimetric synthetic aperture radar imagery. IEEE Trans. Geosci. Remote Sens. 2009, 47, 3795–3809. [Google Scholar] [CrossRef]
- Ulehla, Z.J.; Martin, R.F. Operating characteristic analysis of attribute ratings. Behav. Res. Methods 1971, 3, 291–293. [Google Scholar] [CrossRef] [Green Version]
- Lombardo, P.; Oliver, C. Maximum likelihood approach to the detection of changes between multitemporal SAR images. IEE Proc. Radar Sonar Navig. 2002, 148, 200–210. [Google Scholar] [CrossRef]
- Buades, A.; Coll, B.; Morel, J.M. A non-local algorithm for image denoising. In Proceedings of the 2005 IEEE Computer Society Conference on Computer Vision and Pattern Recognition, San Diego, CA, USA, 20–25 June 2005; Volume 2, pp. 60–65. [Google Scholar]
- Otsu, N. A threshold selection method from gray-level histograms. IEEE Trans. Syst. Man Cybern. 1979, 9, 62–66. [Google Scholar] [CrossRef]
- Kapur, J.N.; Sahoo, P.K.; Wong, A.K.C. A new method for gray-level picture thresholding using the entropy of the histogram. Comput. Vis. Graph. Image Process. 1985, 29, 273–285. [Google Scholar] [CrossRef]
- Milligan, G.W.; Cooper, M.C. An examination of procedures for determining the number of clusters in a data set. Psychometrika 1985, 50, 159–179. [Google Scholar] [CrossRef]
- Wong, A.K.C.; Sahoo, P.K. A gray-level threshold selection method based on maximum entropy principle. IEEE Trans. Syst. Man Cybern. 1989, 19, 866–871. [Google Scholar] [CrossRef]
- Lorenzo, B.; Diego Fernàndez, P. An adaptive semiparametric and context-based approach to unsupervised change detection in multitemporal remote-sensing images. IEEE Trans. Image Process. 2002, 11, 452–466. [Google Scholar] [CrossRef] [Green Version]
- Bazi, Y.; Bruzzone, L.; Melgani, F. An unsupervised approach based on the generalized Gaussian model to automatic change detection in multitemporal SAR images. IEEE Trans. Geosci. Remote Sens. 2005, 43, 874–887. [Google Scholar] [CrossRef] [Green Version]
- Kittler, J.; Illingworth, J. Minimum error thresholding. Pattern Recognit. 1986, 19, 41–47. [Google Scholar] [CrossRef]
- Bovolo, F.; Marchesi, S.; Bruzzone, L. A framework for automatic and unsupervised detection of multiple changes in multitemporal images. IEEE Trans. Geosci. Remote Sens. 2012, 50, 2196–2212. [Google Scholar] [CrossRef]
- Lu, J.; Li, J.; Chen, G.; Zhao, L.; Xiong, B.; Kuang, G. Improving pixel-based change detection accuracy using an object-based approach in multitemporal SAR flood images. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2015, 8, 1–11. [Google Scholar] [CrossRef]
- Bovolo, F.; Bruzzone, L. A detail-preserving scale-driven approach to change detection in multitemporal SAR images. IEEE Trans. Geosci. Remote Sens. 2005, 43, 2963–2972. [Google Scholar] [CrossRef] [Green Version]
- Cohen, J. A coefficient of agreement for nominal scales. Educ. Psychol. Meas. 1960, 20, 37–46. [Google Scholar] [CrossRef]
- Van Rijsbergen, C.J. Information Retrieval; Butterworths: London, UK, 1979. [Google Scholar]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Method | IR | LR | NLMR | MR-7 × 7 | NR-7 × 7 | INR-7 × 7 | GLRT-7 × 7 | STANR |
|---|---|---|---|---|---|---|---|---|
| AUC | 0.908 | 0.906 | 0.995 | 0.992 | 0.981 | 0.994 | 0.994 | 0.997 |
| Method | Missed Alarms | Overall Error | Detected Changes | Kappa | F1 Score |
|---|---|---|---|---|---|
| IR | 3635 | 4134 | 2586 | 0.544 | 0.556 |
| LR | 2321 | 2871 | 3900 | 0.722 | 0.731 |
| NLMR | 1119 | 1360 | 5102 | 0.878 | 0.882 |
| MR-7 × 7 | 1134 | 1431 | 5087 | 0.872 | 0.877 |
| NR-7 × 7 | 1332 | 1720 | 4889 | 0.845 | 0.850 |
| INR-7 × 7 | 1047 | 1302 | 5174 | 0.884 | 0.888 |
| GLRT-7 × 7 | 1051 | 1333 | 5170 | 0.882 | 0.886 |
| STANR | 855 | 1217 | 5366 | 0.894 | 0.898 |
| Method | IR | LR | NLMR | MR-3 × 3 | NR-5 × 5 | INR-5 × 5 | GLRT-3 × 3 | STANR |
|---|---|---|---|---|---|---|---|---|
| AUC | 0.977 | 0.985 | 0.998 | 0.995 | 0.996 | 0.997 | 0.993 | 0.999 |
| Method | Missed Alarms | Overall Error | Detected Changes | Kappa | F1 Score |
|---|---|---|---|---|---|
| IR | 368 | 665 | 787 | 0.699 | 0.703 |
| LR | 357 | 546 | 798 | 0.742 | 0.745 |
| NLMR | 267 | 395 | 888 | 0.816 | 0.818 |
| MR-3 × 3 | 230 | 318 | 925 | 0.851 | 0.853 |
| NR-5 × 5 | 234 | 347 | 921 | 0.839 | 0.841 |
| INR-5 × 5 | 218 | 303 | 937 | 0.859 | 0.861 |
| GLRT-3 × 3 | 222 | 317 | 933 | 0.853 | 0.855 |
| STANR | 214 | 302 | 941 | 0.860 | 0.862 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhuang, H.; Fan, H.; Deng, K.; Yao, G. A Spatial-Temporal Adaptive Neighborhood-Based Ratio Approach for Change Detection in SAR Images. Remote Sens. 2018, 10, 1295. https://doi.org/10.3390/rs10081295
Zhuang H, Fan H, Deng K, Yao G. A Spatial-Temporal Adaptive Neighborhood-Based Ratio Approach for Change Detection in SAR Images. Remote Sensing. 2018; 10(8):1295. https://doi.org/10.3390/rs10081295
Chicago/Turabian StyleZhuang, Huifu, Hongdong Fan, Kazhong Deng, and Guobiao Yao. 2018. "A Spatial-Temporal Adaptive Neighborhood-Based Ratio Approach for Change Detection in SAR Images" Remote Sensing 10, no. 8: 1295. https://doi.org/10.3390/rs10081295
APA StyleZhuang, H., Fan, H., Deng, K., & Yao, G. (2018). A Spatial-Temporal Adaptive Neighborhood-Based Ratio Approach for Change Detection in SAR Images. Remote Sensing, 10(8), 1295. https://doi.org/10.3390/rs10081295