Evaluating a Static Multibeam Sonar Scanner for 3D Surveys in Confined Underwater Environments †

 ,
,  and
and
Abstract
:1. Introduction
2. Related Works
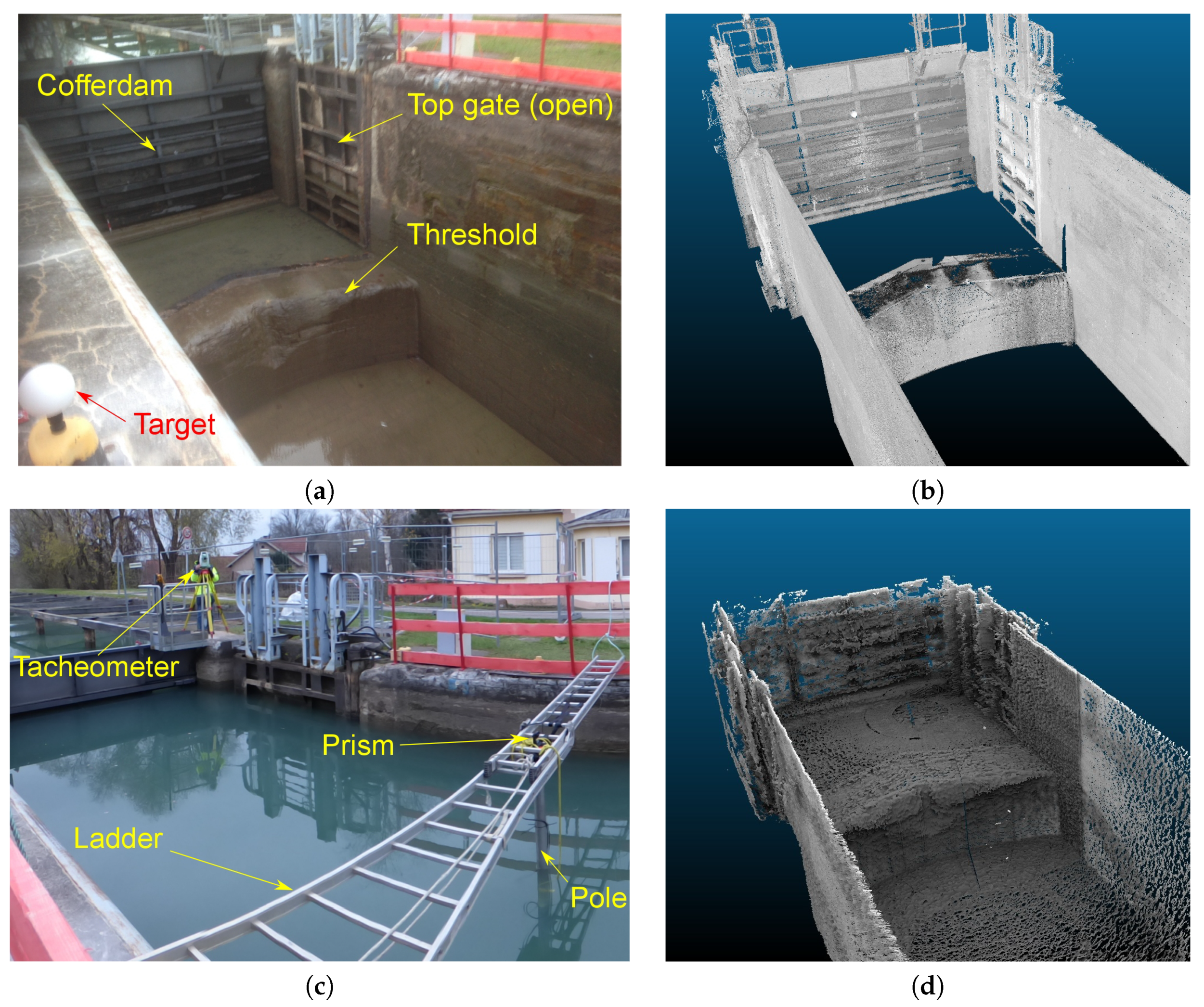
3. Experimental Set-Up
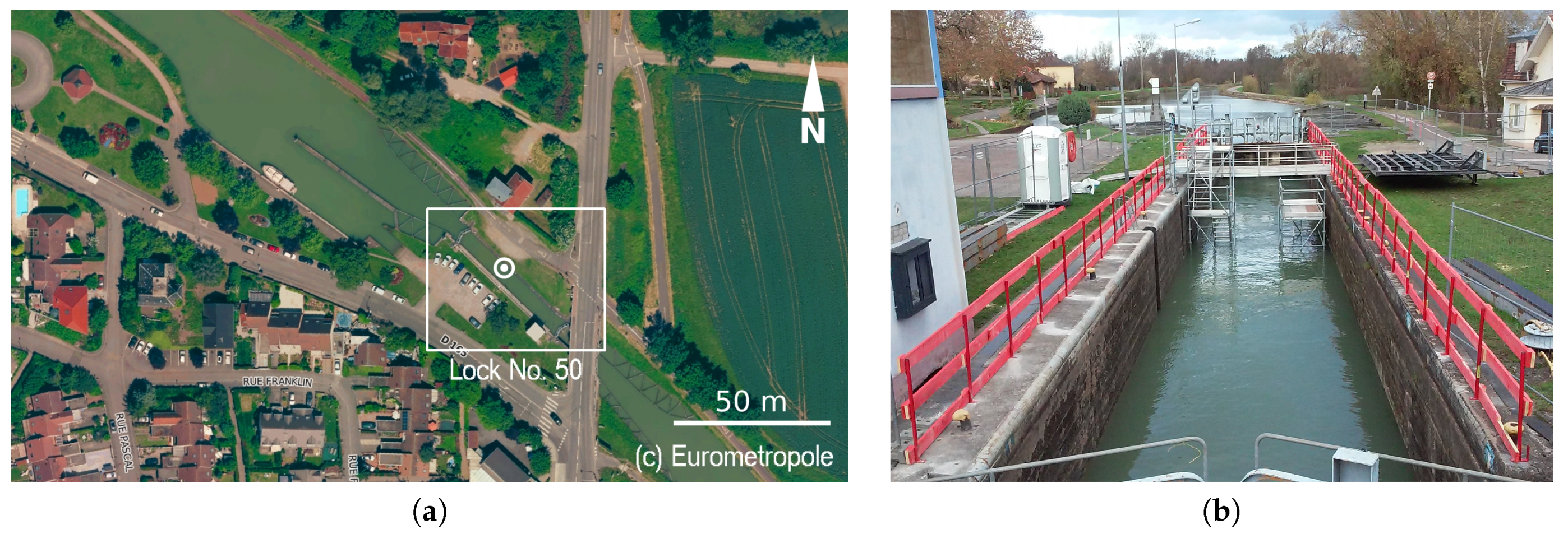
3.1. Test Site
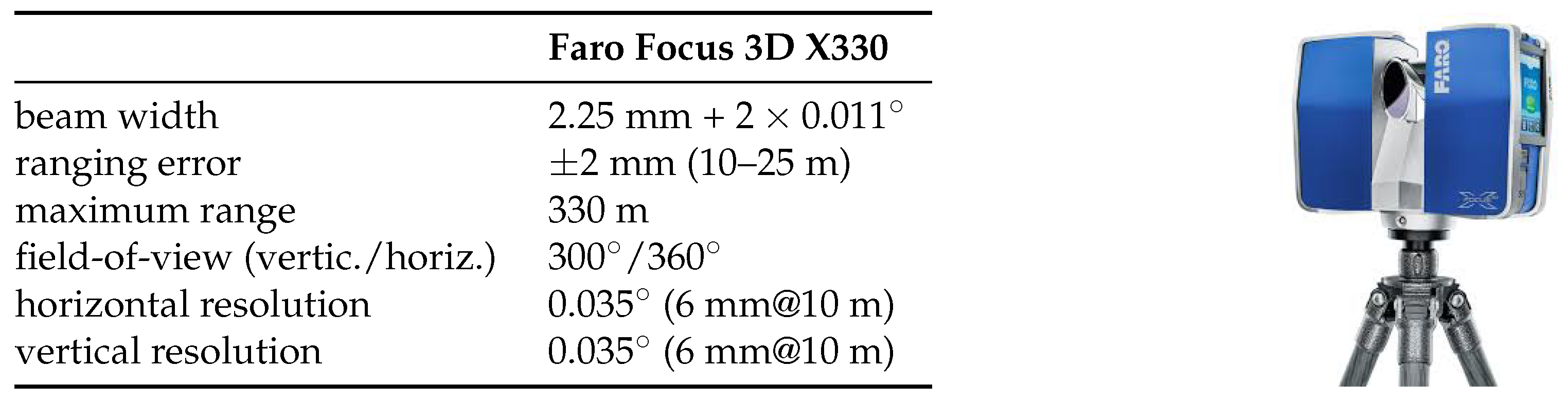
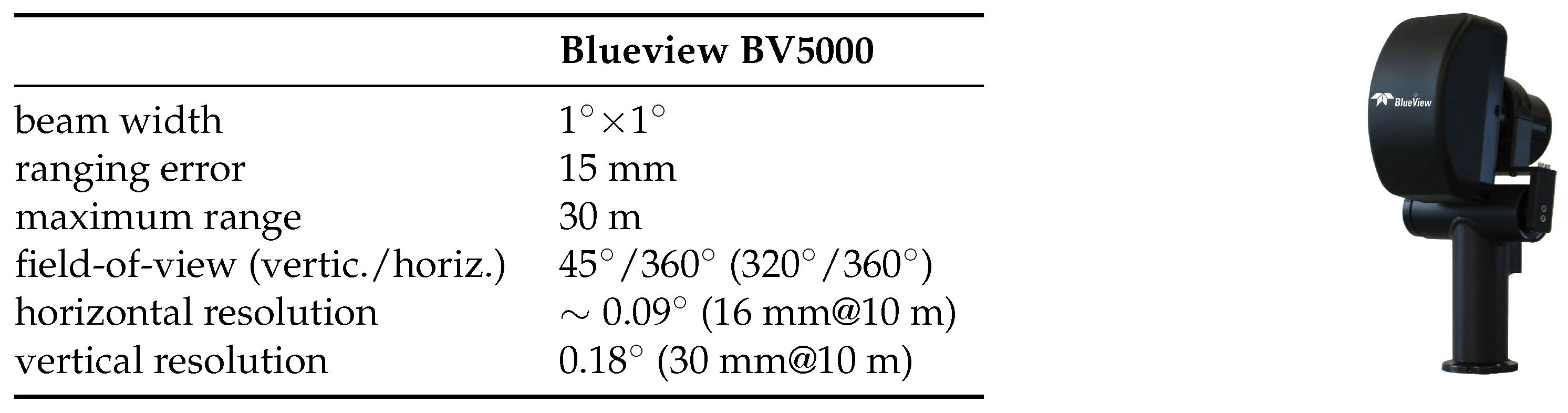
3.2. Description of the Sensors
3.3. Data Acquisition
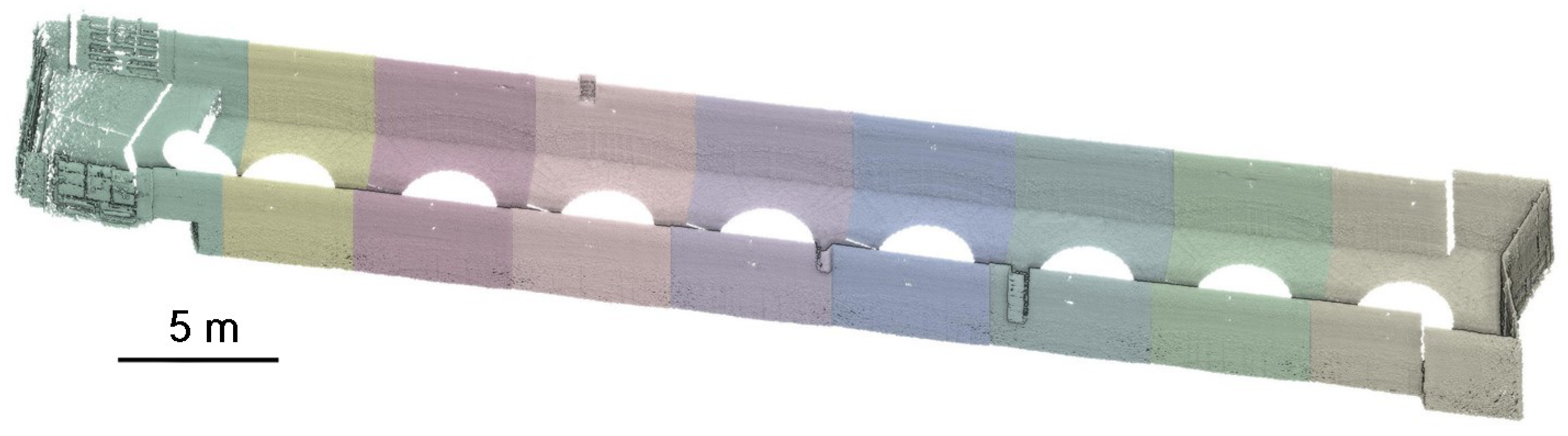
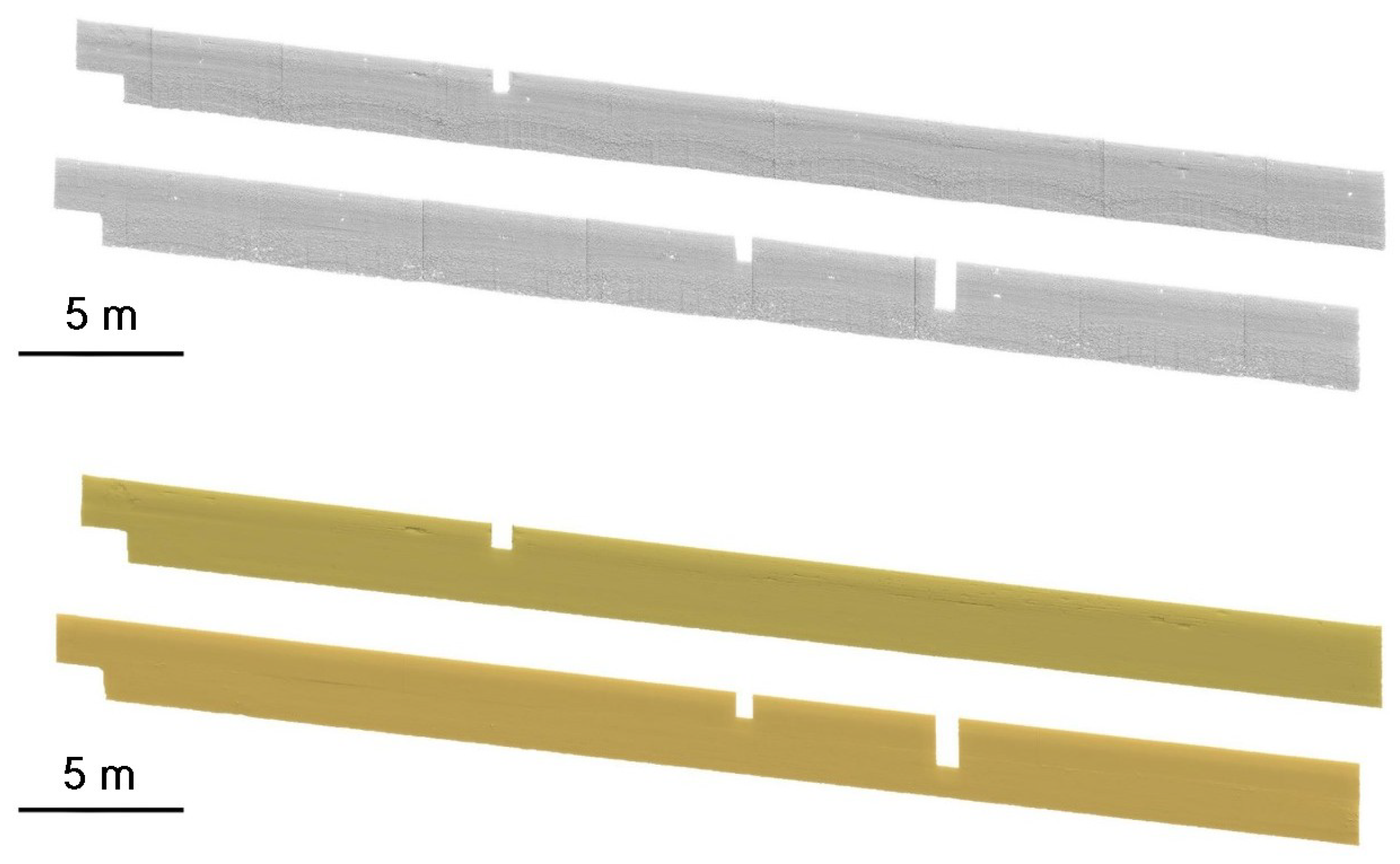
4. Construction of the 3D Models
4.1. Laser Data Processing
4.2. Sonar Data Pre-Processing
4.2.1. Review of the Observed Artefacts
4.2.2. Tilt Angle Correction
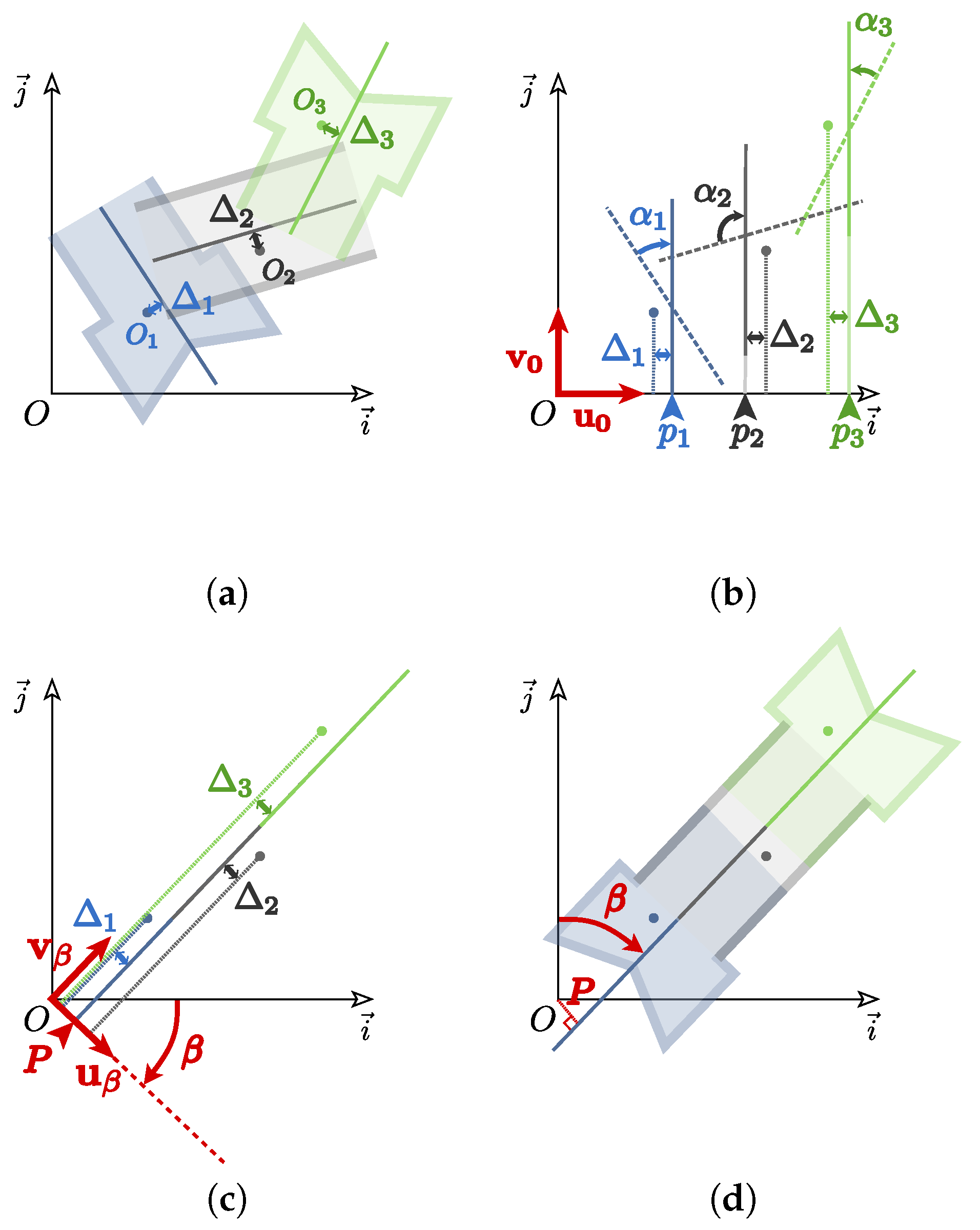
4.3. Alignement and Registration of Sonar Scans
4.3.1. Leveling and Translation
4.3.2. Horizontal Orientation
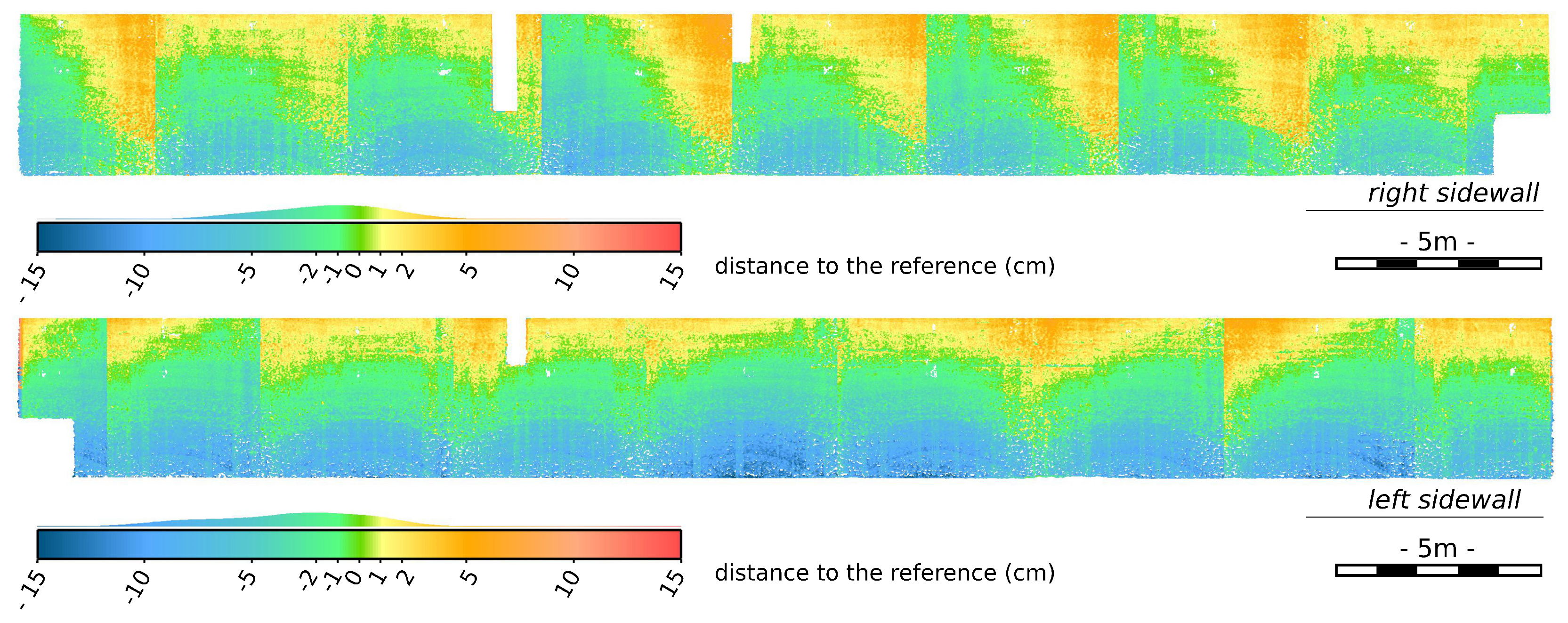
5. Comparison of Sonar and Laser Models
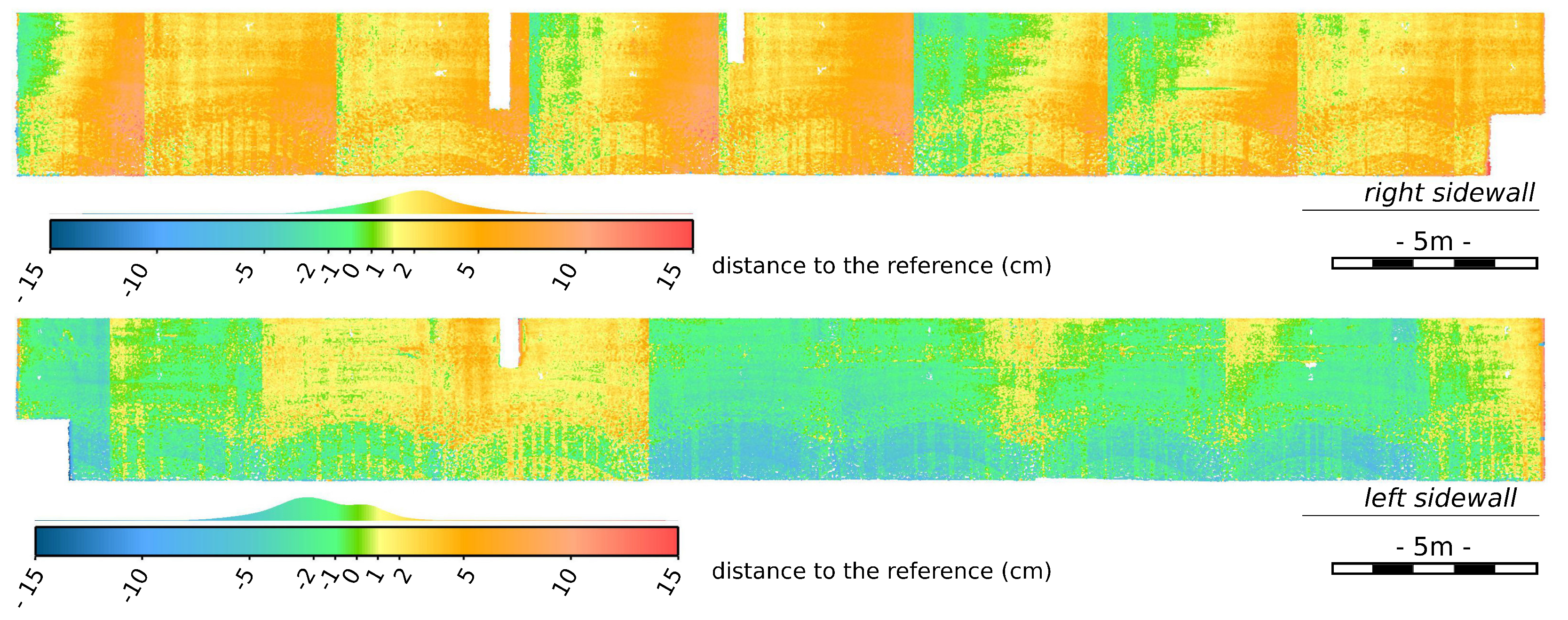
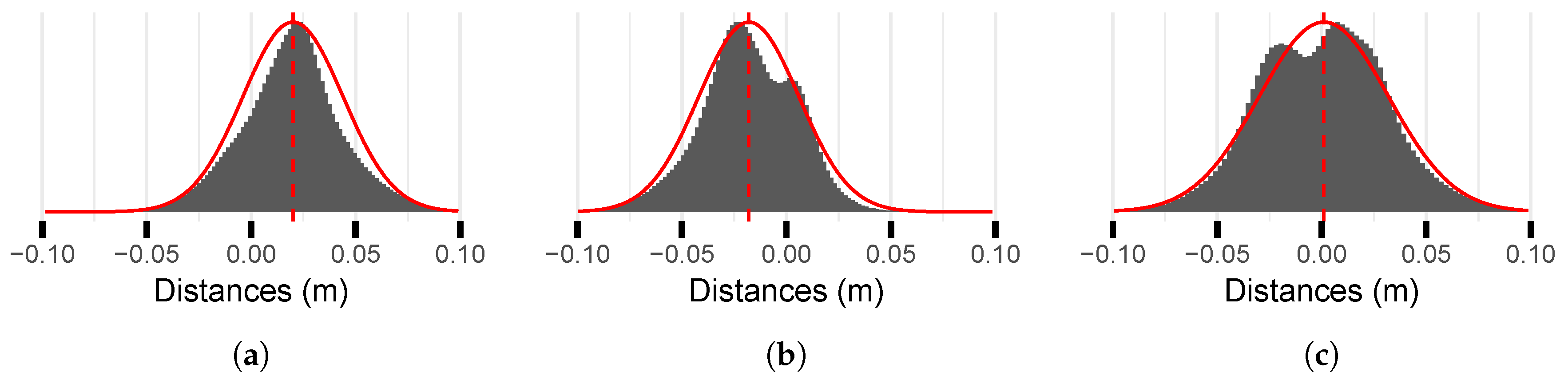
5.1. Quantitative Evaluation
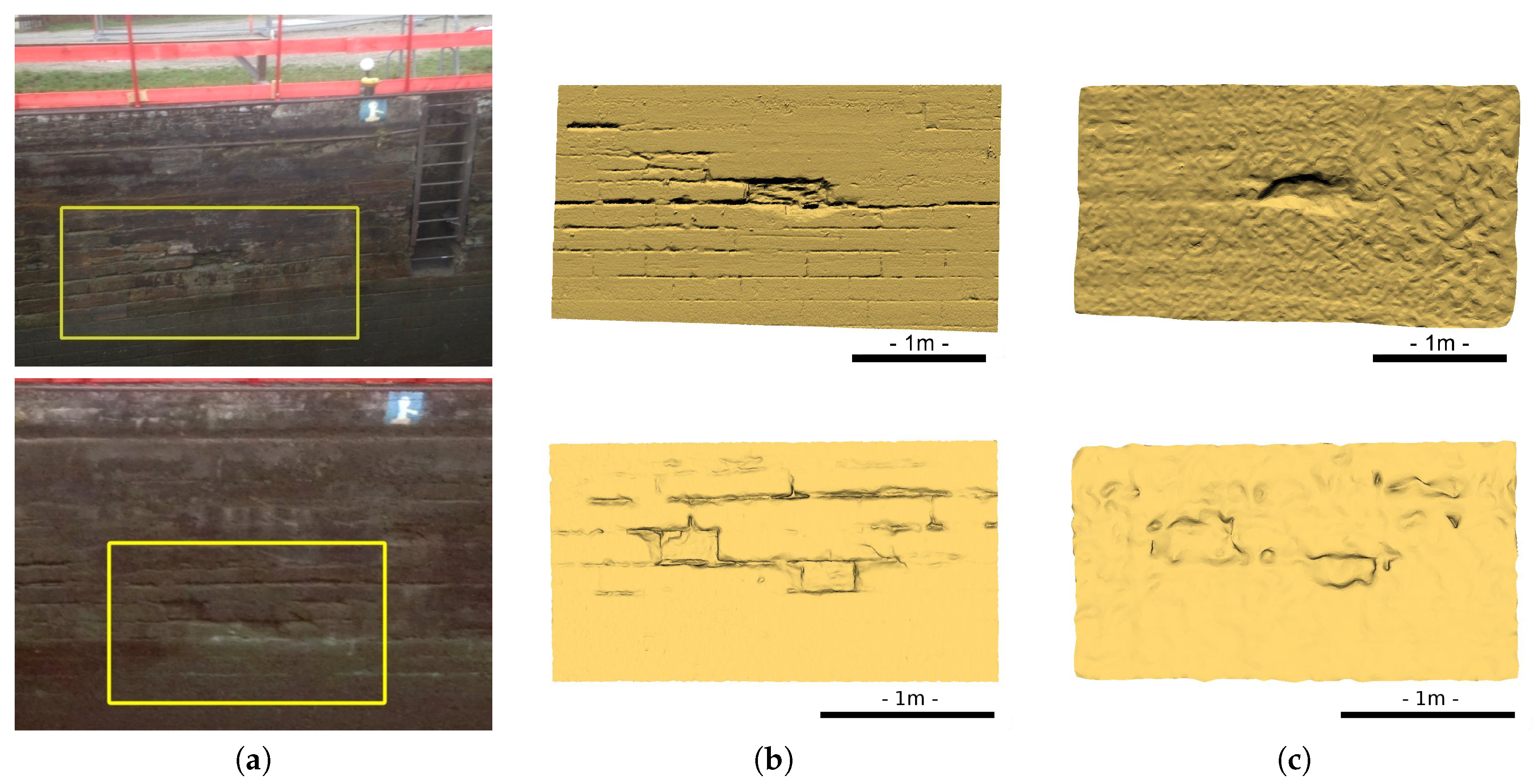
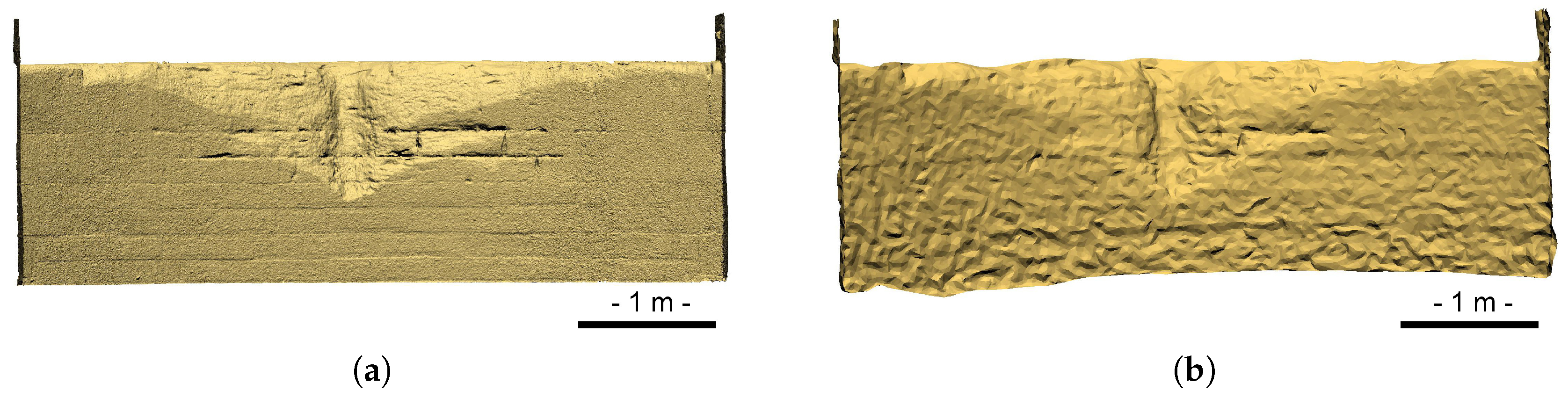
5.2. Qualitative Examination of Details
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Rondeau, M.; Leblanc, E.; Garant, L. Dam infrastructure first inspection supported by an integrated multibeam echosounder (MBES)/LiDAR system. In Proceedings of the CDA Annual Conference, Saskatoon, SK, Canada, 16 October 2012. [Google Scholar]
- Rondeau, M.; Stoeffler, C.; Brodie, D.; Holland, M. Deformation analysis of harbour and dam infrastructure using marine GIS. In U.S. Hydro 2015; The Hydrographic Society of America: National Harbor, MD, USA, 2015. [Google Scholar]
- Lesnikowski, N.; Rush, B. Spool Piece Metrology Applications Utilizing BV5000 3D Scanning Sonar: High Resolution Acoustic Technology for Underwater Measurement; Technical Report; BlueView Technologies: Seattle, AC, USA, 2012. [Google Scholar]
- Moisan, E.; Charbonnier, P.; Foucher, P.; Grussenmeyer, P.; Guillemin, S.; Koehl, M. Adjustment of Sonar and Laser Acquisition Data for Building the 3D Reference Model of a Canal Tunnel. Special Issue Sensors and Techniques for 3D Object Modeling in Underwater Environments. Sensors 2015, 15, 31180–31204. [Google Scholar] [CrossRef] [PubMed]
- Moisan, E.; Charbonnier, P.; Foucher, P.; Grussenmeyer, P.; Guillemin, S.; Samat, O.; Pagès, C. Assessment of a static multibeam sonar scanner for 3D surveying in confined subaquatic environments. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2016, 41, 541–548. [Google Scholar] [CrossRef]
- Ridao, P.; Carreras, M.; Ribas, D.; Garcia, R. Visual inspection of hydroelectric dams using an autonomous underwater vehicle. J. Field Robot. 2010, 27, 759–778. [Google Scholar] [CrossRef] [Green Version]
- Paull, L.; Saeedi, S.; Seto, M.; Li, H. AUV Navigation and Localization: A Review. IEEE J. Ocean. Eng. 2014, 39, 131–149. [Google Scholar] [CrossRef]
- Massot-Campos, M.; Oliver-Codina, G. Optical Sensors and Methods for Underwater 3D Reconstruction. Sensors 2015, 15, 31525–31557. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Mallios, A.; Ridao, P.; Ribas, D.; Hernández, E. Scan matching SLAM in underwater environments. Auton. Robots 2014, 36, 181–198. [Google Scholar] [CrossRef]
- Henderson, J.C.; Abbott, B. Using Sector-Scan Sonar for the Survey and Management of Submerged Archaeological Sites. Int. J. Naut.l Archaeol. 2016, 46, 330–345. [Google Scholar] [CrossRef]
- Drap, P.; Merad, D.; Boï, J.M.; Boubguira, W.; Mahiddine, A.; Chemisky, B.; Seguin, E.; Alcala, F.; Bianchimani, O. ROV-3D: 3D Underwater Survey Combining Optical and Acoustic Sensor. In Proceedings of the 12th International Conference on Virtual Reality, Archaeology and Cultural Heritage, Aire-la-Ville, Switzerland, 18–21 October 2011; pp. 177–184. [Google Scholar]
- Drap, P.; Merad, D.; Boï, J.M.; Mahiddine, A.; Peloso, D.; Chemisky, B.; Seguin, E.; Alcala, F.; Bianchimani, O. Underwater Multimodal Survey: Merging Optical and Acoustic Data. In Underwater Seascapes: From Geographical to Ecological Perspectives; Musard, O., Le Dû-Blayo, L., Francour, P., Beurier, J.P., Feunteun, E., Talassinos, L., Eds.; Springer International Publishing: Cham, Switzerland, 2014; pp. 221–238. [Google Scholar] [Green Version]
- Sohnlein, G.; Rush, S.; Thompson, L. Using manned submersibles to create 3D sonar scans of shipwrecks. In Proceedings of the IEEE OCEANS Conference, Waikoloa, HI, USA, 19–22 September 2011; pp. 1–10. [Google Scholar]
- Kaufmann, K.E. Using Divers and 3D Sonar Technology to Study Historic Shipwrecks in Lake Michigan. In Diving For Science 2015: Proceedings of the AAUS 34th Scientific Symposium, Key West, FL, USA, 28 September–3 October 2015; Lobel, L., Ed.; AAUS: Dauphin Island, AL, USA, 2015; pp. 40–47. [Google Scholar]
- Thompson, R.L. New 3D Acoustic Scanning Tools and Techniques for Underwater Metrology and Inspection. OTC-21940-MS. In Proceedings of the Offshore Technology Conference, Houston, TX, USA, 2–5 May 2011. [Google Scholar]
- Besl, P.; McKay, N. A method for registration of 3-D shapes. IEEE Trans. Pattern Anal. Mach. Intell. 1992, 14, 239–256. [Google Scholar] [CrossRef]
- Chen, Y.; Medioni, G. Object modeling by registration of multiple range images. Image Vis. Comput. 1992, 10, 145–155. [Google Scholar] [CrossRef]
- Grussenmeyer, P.; Landes, T.; Doneus, M.; Lerma, J.L. Basics of range-based modelling techniques in Cultural Heritage 3D recording, chapter 6. In 3D Recording, Documentation and Management in Cultural Heritage; Remondino, F., Stylianidis, S., Eds.; Whittles Publishing: Dunbeath, UK, 2016; pp. 305–368. [Google Scholar]
- Thomas, L. The A.J. Goddard: Reconstruction and Material Culture of a Klondike Gold Rush Sternwheeler. Master’s Thesis, Texas A&M University, College Station, TX, USA, 2011. [Google Scholar]
- Cignoni, P.; Rocchini, C.; Scopigno, R. Metro: Measuring Error on Simplified Surfaces. Comput. Graph. Forum 1998, 17, 167–174. [Google Scholar] [CrossRef]



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Position on Wall (m) | 0 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 |
|---|---|---|---|---|---|---|---|---|---|---|---|
| Sonar footprint (cm) | 4.54 | 5.21 | 7.22 | 10.58 | 15.28 | 21.33 | 28.72 | 37.45 | 47.54 | 58.97 | 71.75 |
| Laser footprint (cm) | 0.32 | 0.36 | 0.44 | 0.58 | 0.75 | 0.96 | 1.20 | 1.47 | 1.77 | 2.11 | 2.47 |
| Right Wall | Left Wall | Overall | ||||
|---|---|---|---|---|---|---|
| Original | Rectified | Original | Rectified | Original | Rectified | |
| Mean | −1,6 | 2,0 | −3,3 | −1,8 | −2,4 | 0,1 |
| Standard dev. | 3,0 | 2,4 | 3,7 | 2,4 | 3,5 | 3,1 |
| Max | 6,5 | 10,7 | 7,7 | 10,3 | −14,4 | 10,7 |
| Min | −10,6 | −6,5 | −14,4 | −9,8 | 7,7 | −9,8 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Moisan, E.; Charbonnier, P.; Foucher, P.; Grussenmeyer, P.; Guillemin, S. Evaluating a Static Multibeam Sonar Scanner for 3D Surveys in Confined Underwater Environments. Remote Sens. 2018, 10, 1395. https://doi.org/10.3390/rs10091395
Moisan E, Charbonnier P, Foucher P, Grussenmeyer P, Guillemin S. Evaluating a Static Multibeam Sonar Scanner for 3D Surveys in Confined Underwater Environments. Remote Sensing. 2018; 10(9):1395. https://doi.org/10.3390/rs10091395
Chicago/Turabian StyleMoisan, Emmanuel, Pierre Charbonnier, Philippe Foucher, Pierre Grussenmeyer, and Samuel Guillemin. 2018. "Evaluating a Static Multibeam Sonar Scanner for 3D Surveys in Confined Underwater Environments" Remote Sensing 10, no. 9: 1395. https://doi.org/10.3390/rs10091395
APA StyleMoisan, E., Charbonnier, P., Foucher, P., Grussenmeyer, P., & Guillemin, S. (2018). Evaluating a Static Multibeam Sonar Scanner for 3D Surveys in Confined Underwater Environments. Remote Sensing, 10(9), 1395. https://doi.org/10.3390/rs10091395