1. Introduction
The emergence of three-dimensional remote sensing techniques such as aerial laser scanning (ALS) and digital aerial photogrammetry (DAP) have the ability to provide detailed structural information in the form of point clouds. Provided an adequate digital elevation model (DEM) can be extracted from point clouds, analysis techniques such as individual tree crown detection (ITCD) [
1,
2,
3,
4] and area-based analysis (ABA) [
5,
6,
7] can be applied to estimate metrics related to forest structure. ABA metrics generated from the normalized vertical distribution of point clouds can be used to describe complex forest attributes such as timber volume, biomass and basal area from models established between sample field measurements such as tree height and diameter at breast height (DBH). Similar ALS derived structural metrics have also been shown to highlight various animal-habitat associations, useful in implementing effective conservation strategies [
8,
9].
Concurrent with the development of DAP analysis techniques has been the increased adoption of camera-equipped unmanned aerial systems (UAS). Originally developed for military operations [
10], UASs have been rapidly adopted in a wide range of commercial markets. Recent adoption of Lithium-Ion battery technologies in consumer UASs enable greater power to weight ratios and thus flight duration and payload capacity [
11]. In addition, the decreasing size, cost and increasing resolution of consumer-grade cameras [
10,
12] have driven such rapid UAS expansion. Systems specializing in quadcopter flight stability, previously restricted to military use, can now be paired with flight planning software capable of maintaining above ground level (AGL) altitude or terrain following [
13]. By flying at lower altitudes than manned counterparts, UAS can capture imagery of higher quality and spatial resolution while reducing dependency on cloud conditions [
14]. Moreover, the ease of deployment of UAS allow for frequent flights and therefore the ability to monitor highly dynamic vegetation compared to conventional remote sensing platforms such as aircraft and satellites [
15,
16].
The ability to provide continuous ground points under complex vegetated environments [
17] has facilitated the commercial adoption of ALS techniques to model terrain and thus assess forest structure [
18]. In contrast, the derivation of dense photogrammetric point clouds from aerial imagery is a relatively newer technology [
19,
20,
21,
22]. Photogrammetry, based on principles of stereo-photography, is the process of gathering 3-D structure from overlapping portions of adjacent two-dimensional images [
23]. The extraction of vertical structure relies on the identification of common objects, known as tie-points, in overlapping images. Practical applications for aerial photogrammetry exist [
24,
25] however, prior to modern digital cameras and advanced computing technology, the creation of photogrammetric products relied on expert photogrammetrists in addition to a pre-existing network of visible tie-points with known coordinates [
26]. Automatic tie-point extraction is now possible with the emergence of Structure from Motion (SfM) algorithms, facilitating a marked increase in image-based 3D data generation [
27]. As a result, DAP approaches are increasingly being applied in natural resource applications; however, detection of the ground using DAP has principally been limited to non-forested landscapes, open forests with no understory, or plantations (
Table 1).
The analysis of 3D point cloud data typically involves the separation of bare-earth from vegetation object components. This allows the point cloud to be normalized according to height above ground, thus facilitating the measurement of three-dimensional forest metrics. This process will be referred to herein as ground classification. The accuracy of such classification varies according to surface variability [
43,
44]; therefore, a DEM generation workflow that accounts for these factors is necessary to ensure accurate estimates of forest structure. Both DAP and ALS point clouds provide accurate, continuous top-of-crown measurements however, the ability for DAP to describe forest structure decreases with distance below the canopy surface. Furthermore, DAP is prone to producing voids in the point cloud where trees found in matching photos may occlude each other [
45]. The disparity of bare-earth coverage between ALS and DAP generally increases with canopy height [
5]. Nevertheless, the low cost and increased repeatability of DAP relative to ALS, for stand-level applications, shows significant potential [
27,
29]. Recent studies indicate that accurate DEM generation from the unsupervised classification of DAP point clouds under open forest canopies is achievable [
29,
31,
46,
47]. For example Guerra-Hernández et al. [
31] used 20 high precision GPS checkpoints and found RMSE of 0.046 m, 0.018 m and 0.033 m in the X, Y and Z directions respectively.
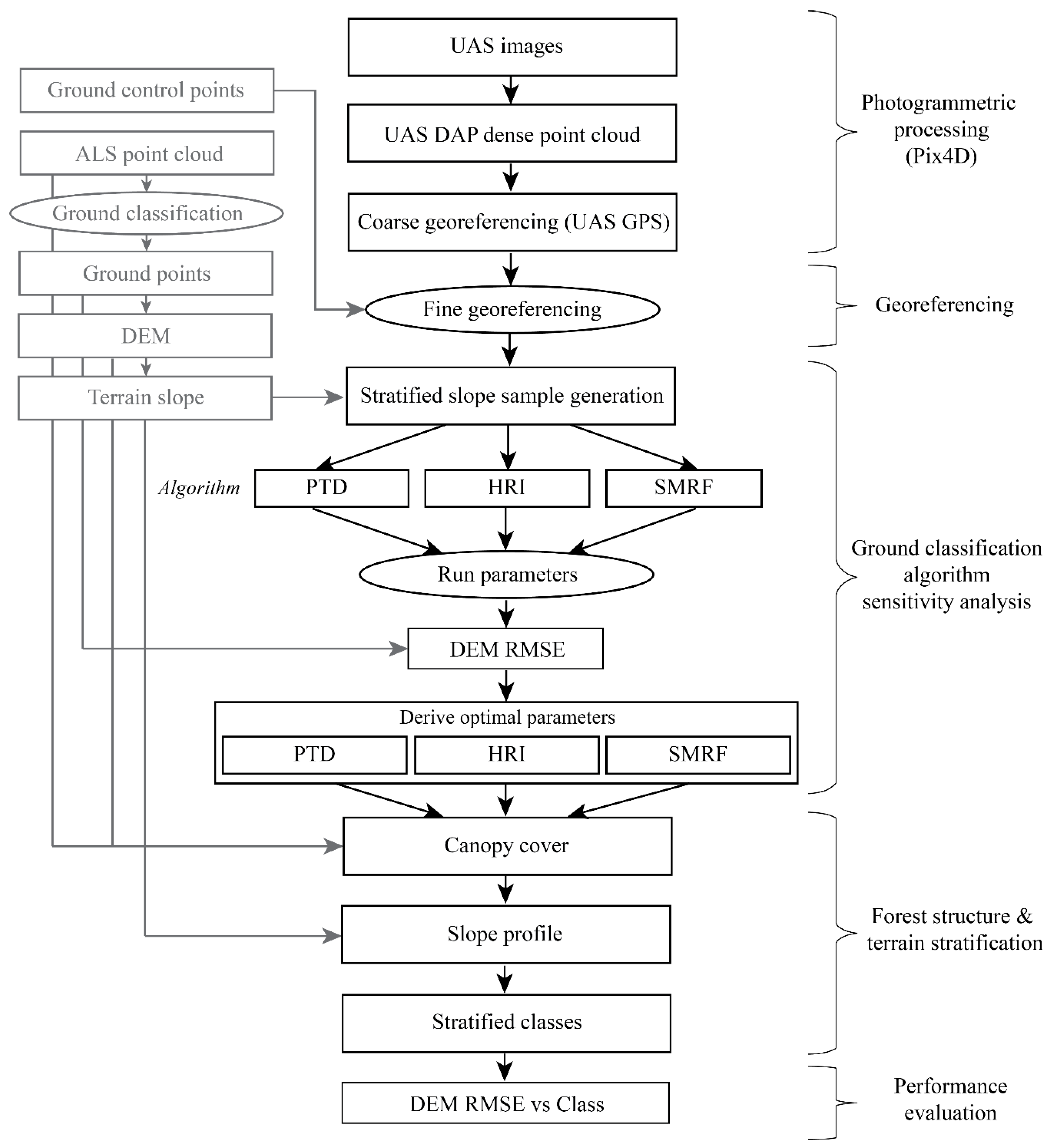
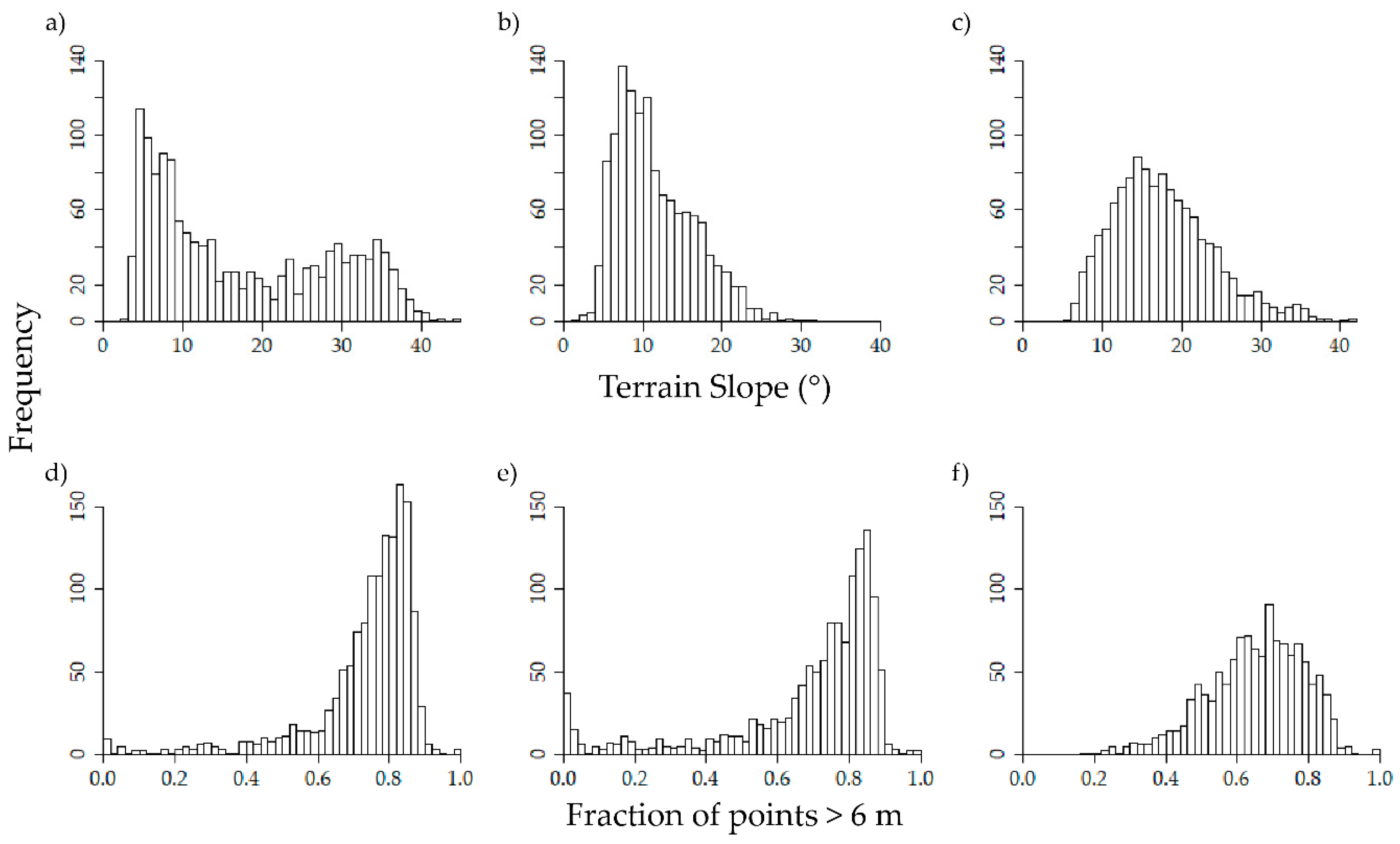
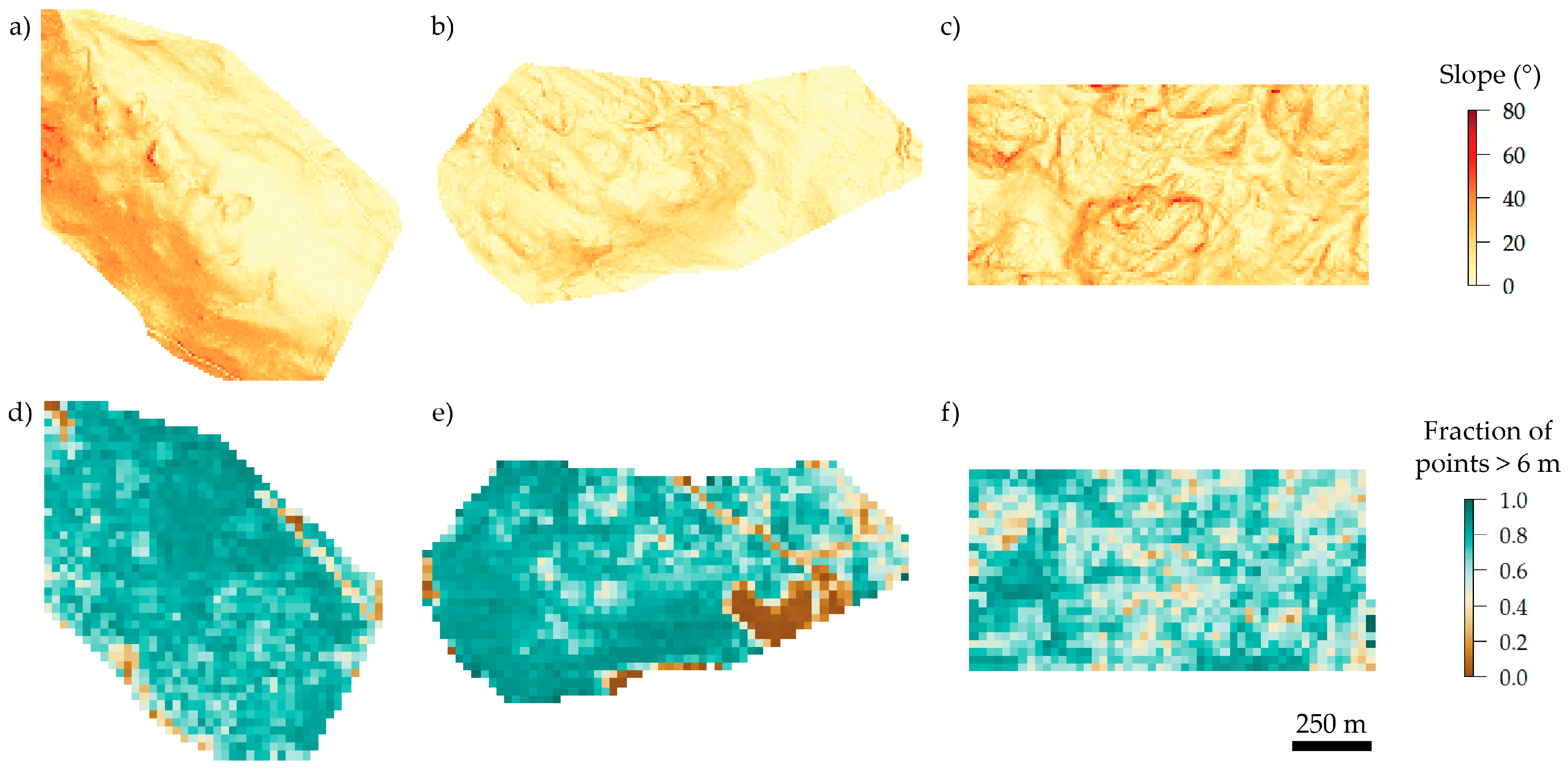
This study aims to (1) obtain terrain-modeling results typical of a low-cost UAS DAP acquisition in a mountainous forest environment, (2) establish optimal parameters of three ground-point classification algorithms, and (3) compare DAP terrain-modeling accuracies under various terrain slope and forest cover conditions. In this paper, we first outline the physical characteristics of the study area chosen for UAS DAP. Secondly, we present the DAP SfM point cloud processing chain and ground control point (GCP) based method of point cloud georeferencing used in this study. This is followed by a description of the ground-point filtering methods applied to UAS DAP point clouds, in addition to a surface interpolation method employed to generate all DEMs. A sensitivity analysis of the ground filtering methods is then described for the purpose of estimating optimal parameters. Accuracies of the UAS DAP derived DEMs (DAP-DEM) are then evaluated against ground filtered ALS points using root-mean-square error (RMSE) and the vertical residual distances (bias) across six stratified classes of forest canopy cover and terrain slope. Lastly, the relative influence of terrain slope and canopy cover on the DAP-DEM error are assessed using a random forest model. We conclude by proposing operational guidelines on the use of DAP to detect the ground surfaces in forest situations.
4. Discussion
This study examined the achievable terrain-modeling accuracy of a low-cost UAS DAP data acquisition. Optimal parameters of three ground classification algorithms, designed for ALS point clouds, were determined using a sensitivity analysis and the variation in terrain-modeling accuracy was analyzed across local terrain slope and forest cover conditions.
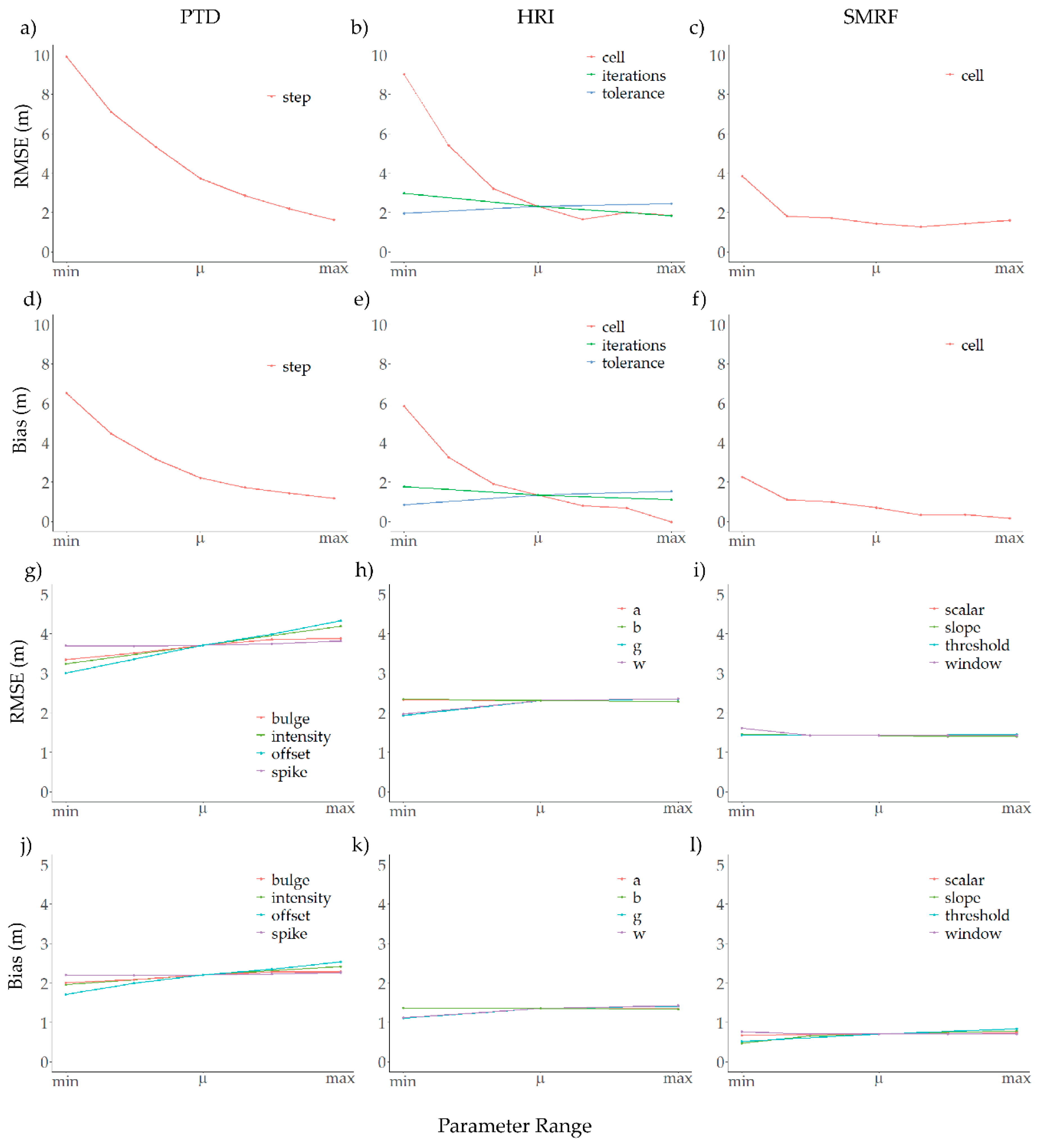
Optimal parameter values for each method differed from the default algorithm values indicating that forested environments, in particular, the combined ICH and SBS BEC zones, require a unique set of parameter values to produce the most accurate DAP-DEM possible. The
step,
cell and
cell parameters of the PTD, HRI and SMRF methods respectively had the greatest influence on DEM RMSE as for they specify the two-dimensional footprint of the initial search for ground points. Given the many ground classification algorithms that employ this fundamental step [
53,
58,
59,
60,
61,
63], the agreement between optimal
step,
cell and
cell values of ~20 m indicate an initial search resolution likely appropriate for conifer stands of the ICH and SBS BEC zones.
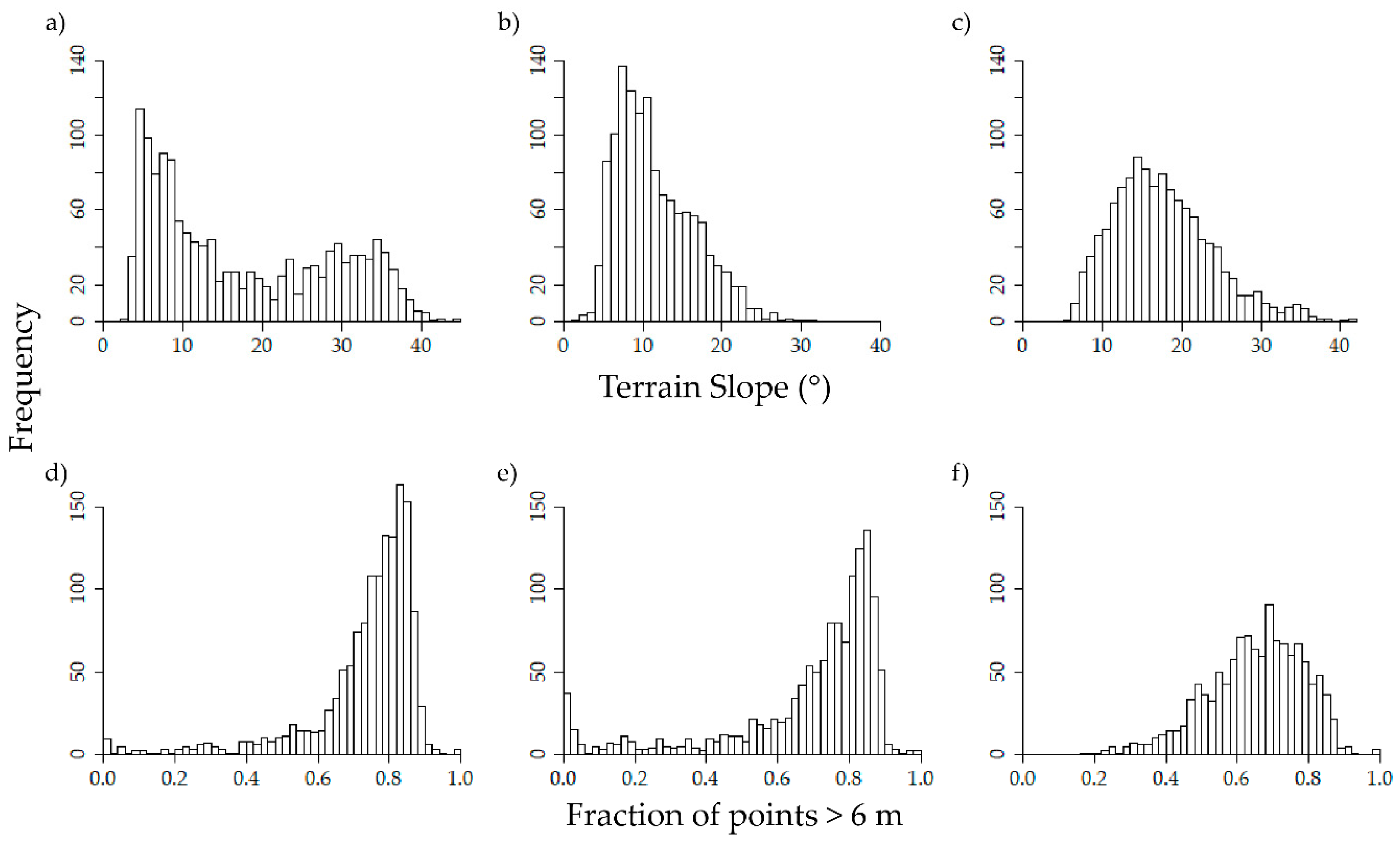
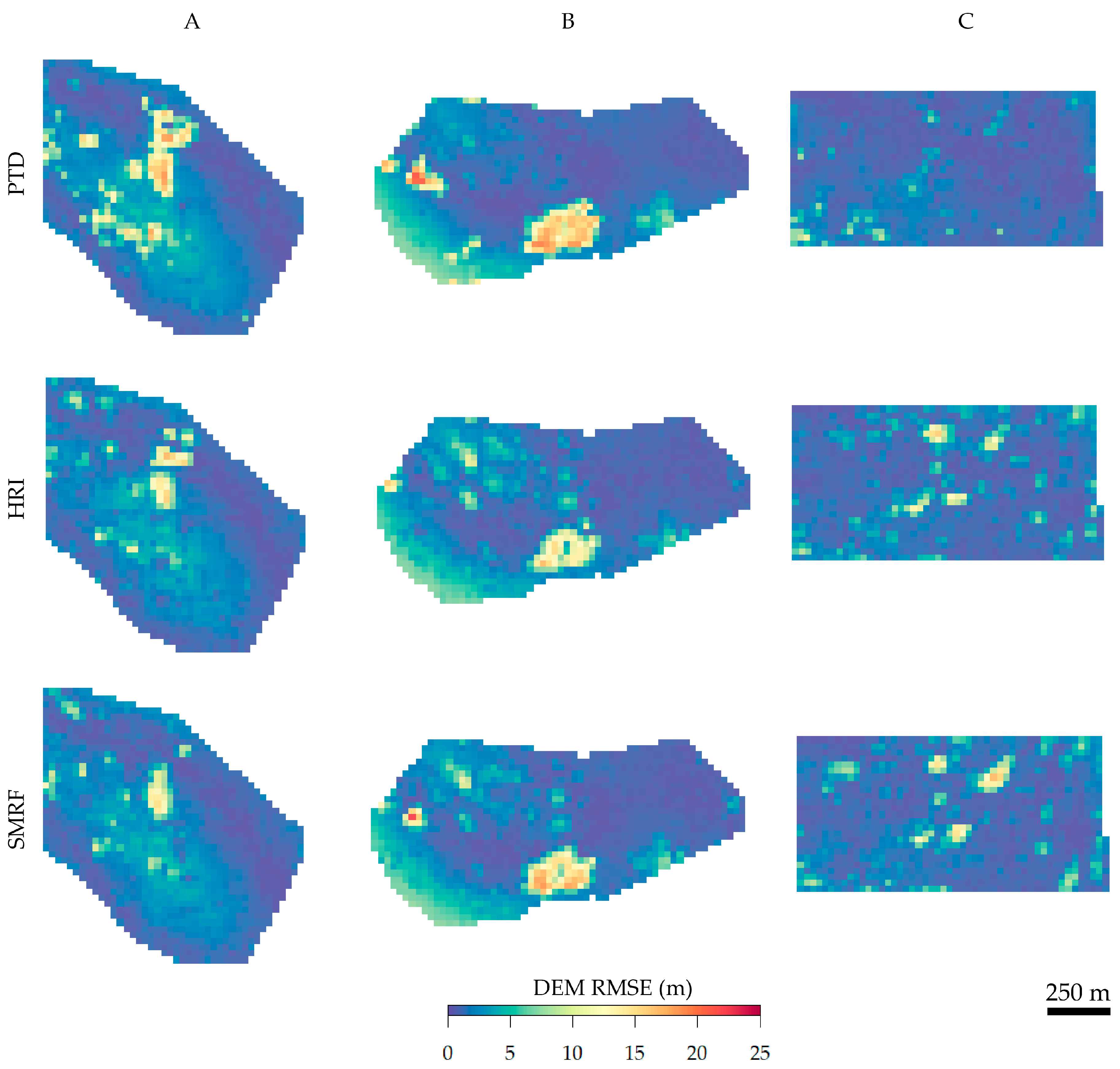
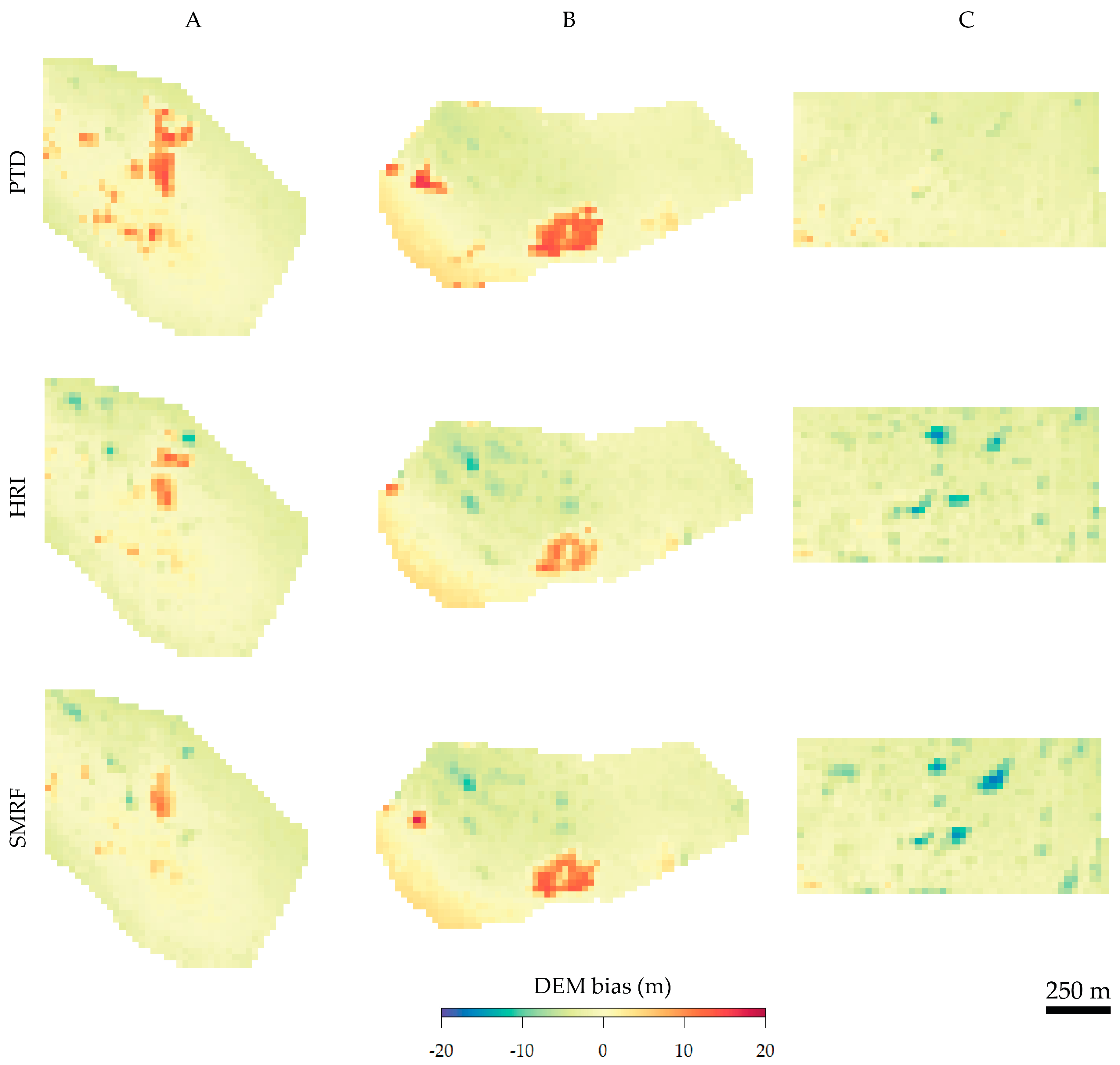
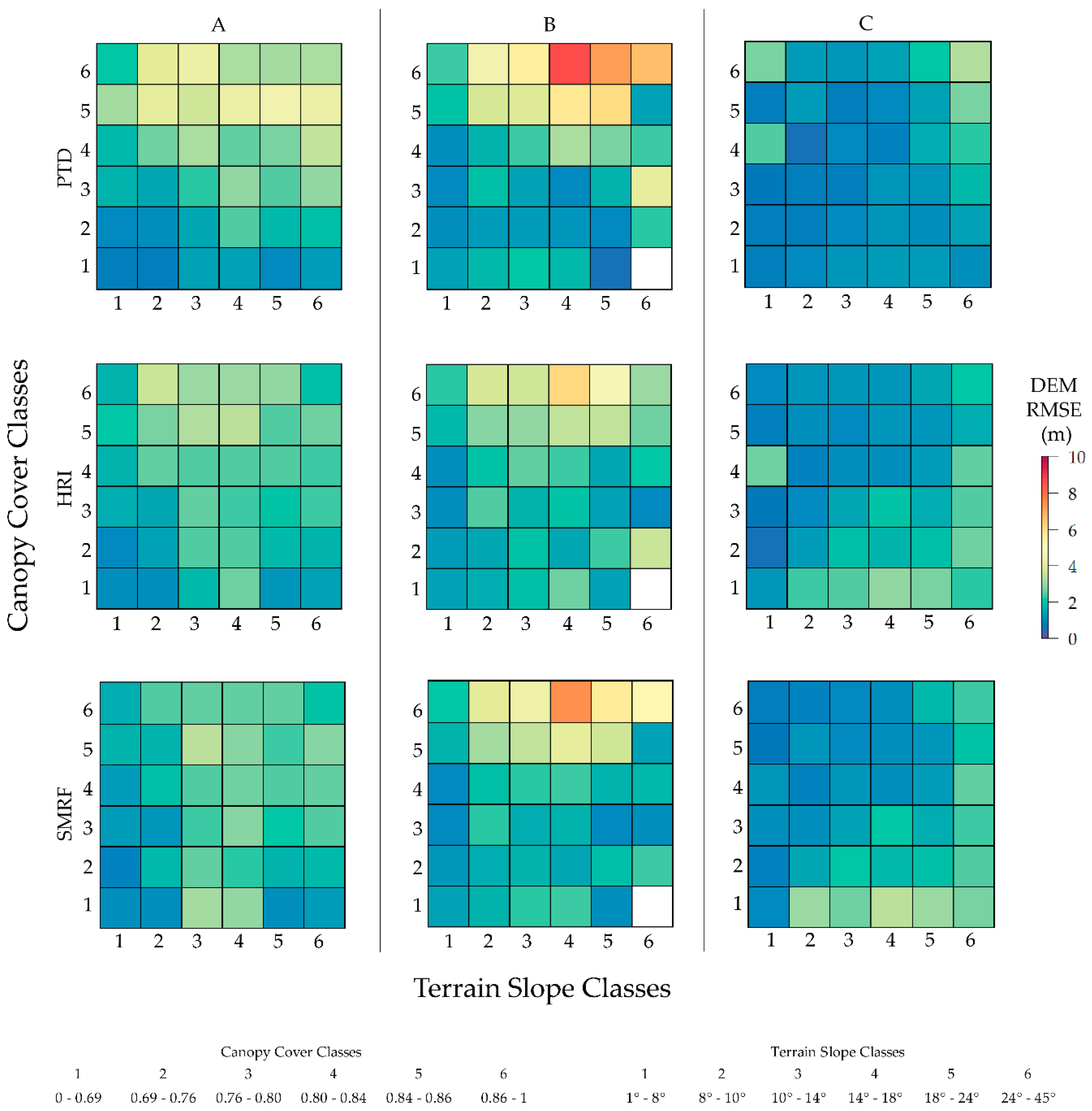
Following the sensitivity analysis, errors of the DAP-DEMs generated employing optimal parameters were compared to stratified classes of terrain slope and canopy cover derived from ALS point clouds. The relative importance of canopy cover was found to be approximately three times that of terrain slope when using optimal parameters of the best performing PTD classification method. We found that 57% of the terrain was modeled with an RMSE < 1.5 m. With this, assuming a mean tree height of 15 m, DEM error may contribute an error of 10% or less. Similar to this study’s findings, Iizuka et al. [
30] generated terrain models within a forested environment from a UAS DAP point cloud and found normalized tree heights to be estimated with a minimum RMSE of 1.712 m. Similarly, Guerra-Hernández et al. [
47] estimated tree heights with an RMSE of 1.82 m using a UAS DAP point cloud normalized by an ALS DEM. As another comparison, Goodbody et al. [
29] were able to produce DAP derived ground models within low cover deciduous forests where the mean error reported was 0.01 m with a standard deviation of 0.14 m. While the results show a significant portion of the terrain was modeled adequately, large errors (>4 m) persist in areas of high canopy cover >80% where DAP was unable to register ground in areas larger than the defined initial search extent of the ground classification algorithms. In these areas, the algorithm misclassifies some canopy points as ground leading to a large over estimation in terrain elevation. Similar to results from this study, Guerra-Hernández et al. [
47] report terrain height overestimation of >±2.0 m in areas of where slope was >20% and canopy cover >60%. Nevertheless, this study finds that there is potential for operationally acceptable DAP-DEM derivation where mean canopy cover is lower than around 70%.
Of the DAP acquisition parameters, flying altitude was restricted by local regulations to 122 m AGL while flight speed was restricted by the speed at which images are written to disk (5 Mb/s) and the desired image capture interval. As result of these restrictions, we were able to capture ~100 ha per day of flight. In comparison to a flat study site, terrain following over the mountainous terrain of the AFRF required additional power to climb and descend reducing the time of each flight. Up to eight readily charged batteries and subsequent takeoffs and landings were necessary in order to replace the battery.
This study assumes the canopy cover and terrain slope derived from ALS acquired in 2008 are adequate descriptions for analysis with DAP data acquired in 2017. We acknowledge that some degree of change to forest structure between the acquisitions is inevitable, and that a smaller temporal gap may have enhanced the relationship between canopy cover and the RMSE. In addition, the precision of GPS point measurement is known to be reduced within coniferous forests [
72,
73,
74]. Therefore the error of GCP locations in complex forested terrain, such as in this region, likely reduced the agreement between DAP-DEMs and ALS points and therefore inflated RMSE. Tomaštík et al. [
75] tested of a range of GCP configurations using a total station in three ~1 ha plots situated in flat, open canopy forests and report a mean vertical RMSE of ~0.1 m. Similarly, Jensen and Mathews [
35] used eight GCP over ~15 ha where the landscape transitioned from savannah to closed canopy woodlands and found a mean estimated error of <0.15 m. Given these comparisons, future analyses involving the fusion of UAS DAP and ancillary spatial data over dense conifer forests requires a more precise direct or indirect georeferencing method for DAP point clouds. One possible solution is to deploy a more extensive GCP network using sub-centimeter precision differential GPS elevations collected from a total station such as done in [
76]; however, defining and mapping the forest floor is challenging and the associated cost of such equipment is high. Another viable solution is the inclusion of higher precision GPS equipment onboard UASs, however this may erode the low-cost advantage of the UAS DAP approach. A third potential solution is the co-registration of the DAP point cloud with an independent, precisely georeferenced spatial dataset such as an ALS point cloud or an accurate road network layer with a high degree of spatial detail and coverage.
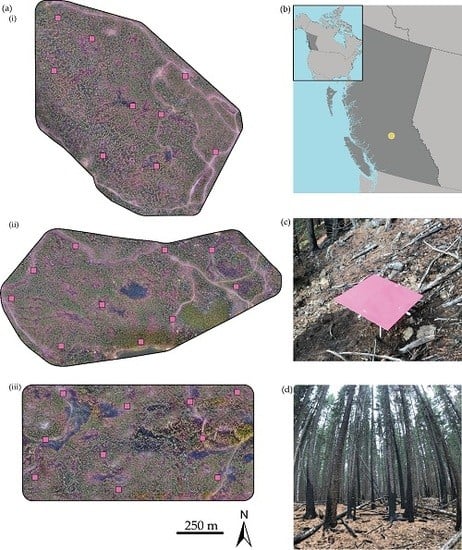
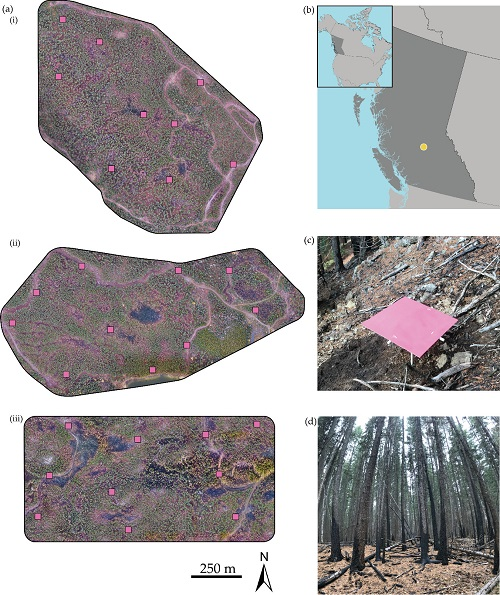
The range of forest conditions found within the chosen AFRF study area are typical of British Columbia’s ICH and SBS BEC zones, which account for 17% of British Columbia’s total land mass [
77]. As previously mentioned the AFRF study areas were disturbed by wildfire in the months prior to image acquisition, potentially reducing over story foliage and therefore ground occlusion, providing the opportunity for a case study unique to stands disturbed by wildfire. Given recent catastrophic forest disturbances from the mountain pine beetle and wildfire across British Columbia, there is a demand from forest managers for the timely collection of structural information. For the many forest related natural resource management agencies around the province, the relatively low cost of UAS deployment compared to ALS opens new possibilities for such data collection. This study provides insight into the feasibility of UAS-DAP derived ground modeling in boreal and temperate forest biomes, which respectively account for 24.2% and 21.8% of global forests [
78].











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}