This section consists of three parts aimed at guiding the reader towards the design of the estimation procedure. More precisely, the first part provides a description of the underlying vibrational model from the physical point of view, whereas the second part explains the ideas behind the estimation procedure. Finally, the third part presents the entire processing chain and describes each operation performed in the course of the parameter estimation.
2.1. Computational Model
In this subsection, we present the model used to describe the vibrations generated by a ship. Since the whole ship can be considered as a complex body consisting of several interacting mechanical components, the analysis of its behavior represents a formidable task. For this reason, at the design stage, the vibration analysis is carried out by resorting to finite element techniques. In fact, a common practice consists in first dividing the ship into five parts:
Hull beam (keel);
Main structural substructures;
Local structural elements.
On-board equipment (electrical power facilities);
Main propulsion systems.
Then, the vibration contribution of each of these components are analyzed. The forces involved along the 3-dimensional reference system can be seen in
Figure 1a. The forces (F1, F2, F3) are generated by the rotation movement of the propulsion propeller, amplified by the sail effect generated by the rudder. The forces (F4, F5) are instead due to the movement of the main axis of the transmission of motion generated by the machines. The coupling system and the engine revolutions-per-minute (rpm) reduction box generates the force F6 while the diesel engine will pull the forces (F7, F8). These are the main sources of vibration, generated by a ship, that propagate along all the structures and superstructures that make up the hull.
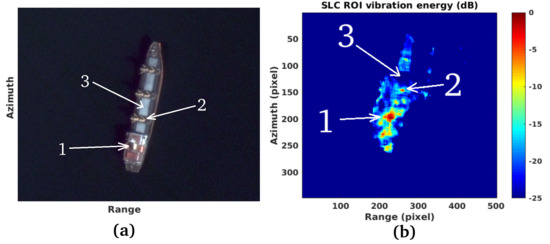
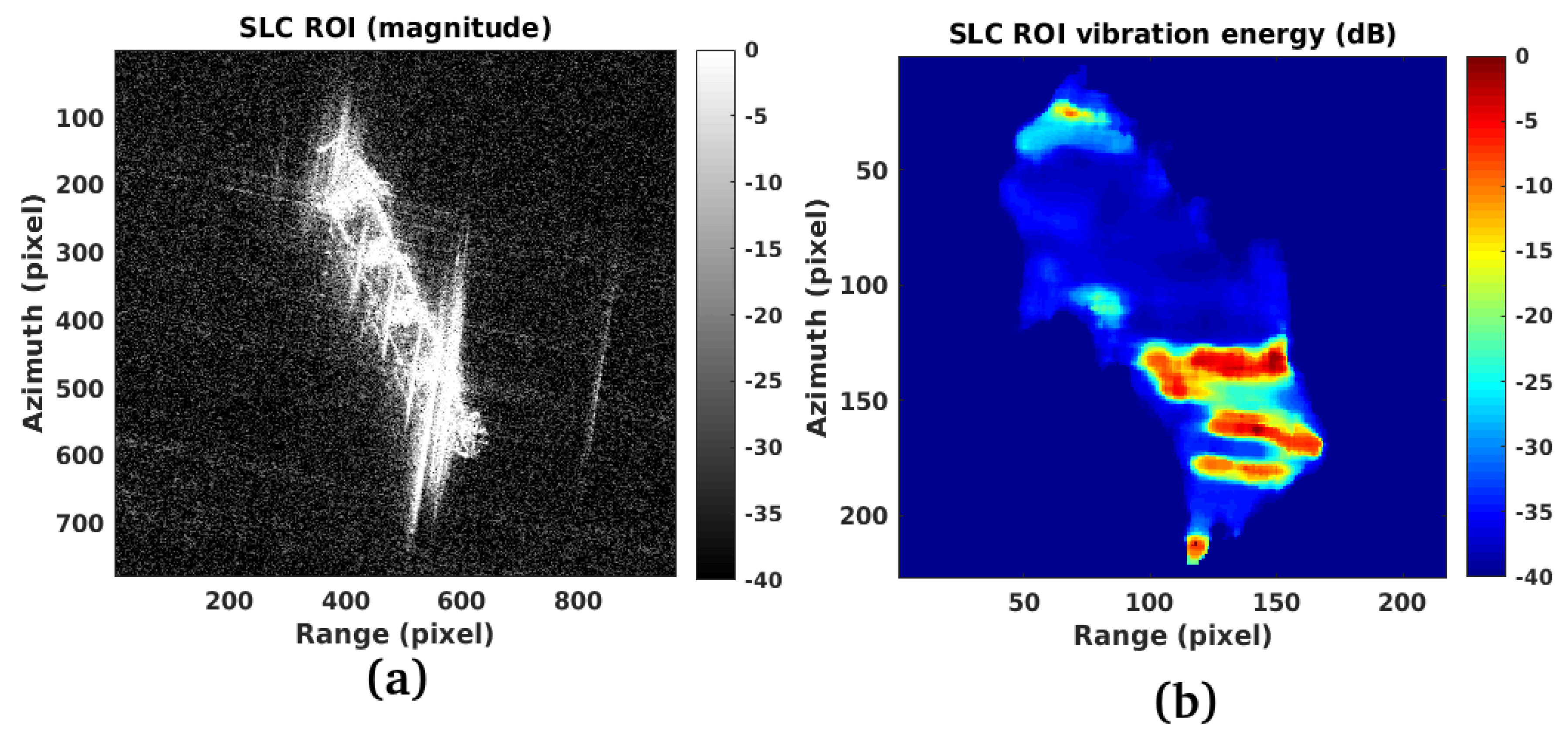
Figure 1b represents the same ship observed in SAR coordinates. The point P1 is hit by the electromagnetic pulses and, during the image formation process, is projected on the point P2 located on the layover projection plane constituting the SAR image. If P1 vibrates along the three Euclidean dimensions, P2 exhibits a vibration in the range-azimuth SAR plane located into the new vector-space slant coordinates. Standard SAR-processing methods are based upon the assumption of a static scene. If targets are moving, their positions in the SAR-image are shifted in azimuth and range-azimuth plan and a defocusing may occur.
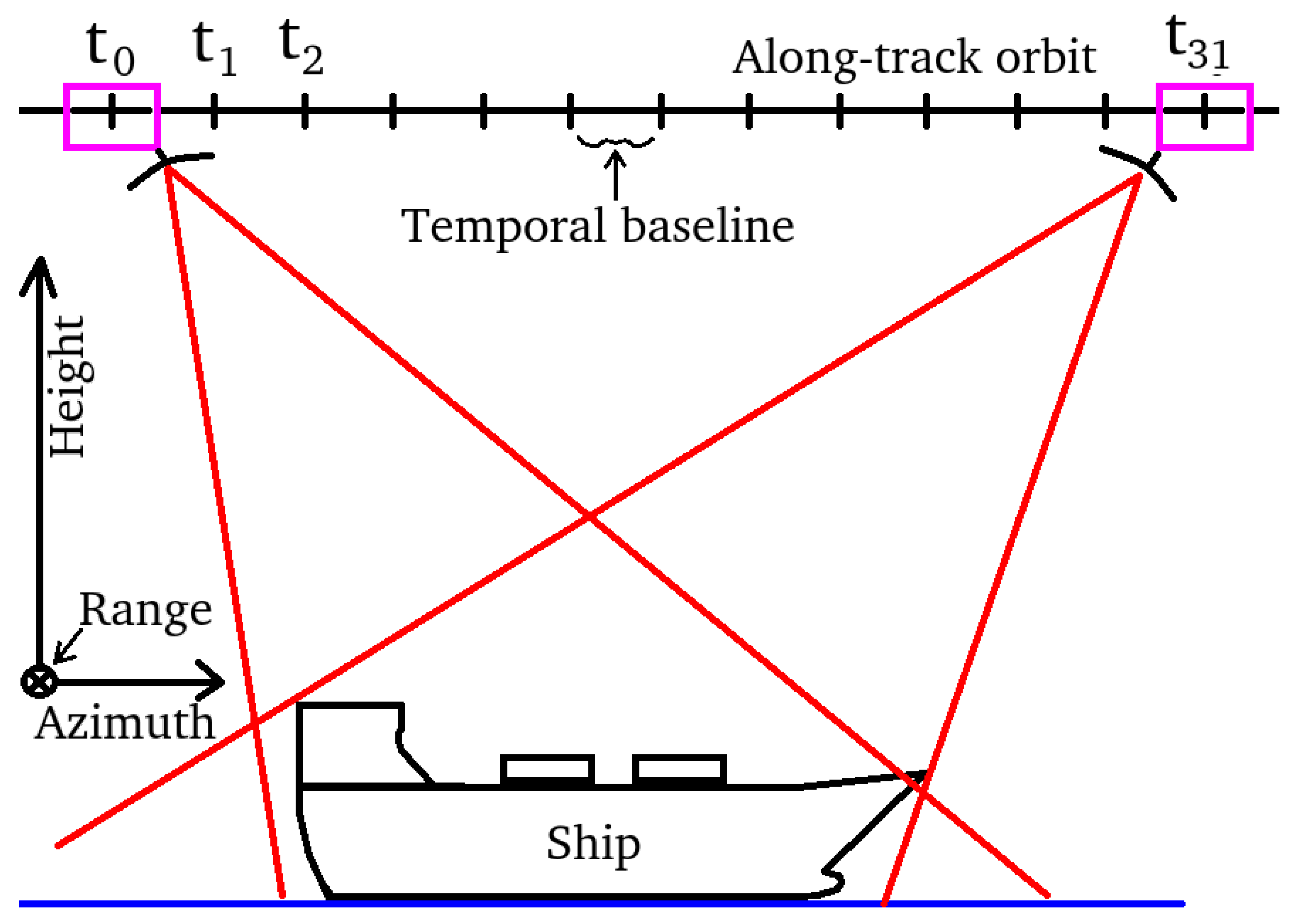
Figure 2 shows the SAR acquisition geometry of the target P1 having a displacement of velocity
with respect to the sensor. According to
Figure 2 the azimuth SAR resolution is determined by the SAR aperture length
L, the electromagnetic wavelength
and the angle between the velocity vector and line of sight
:
The Doppler frequency shift of the stationary target is given by:
where
is the platform velocity and
is the angle existing between the velocity vector and the target direction located at distance
. On the other hand, the Doppler shift defines the azimuth position in the SAR image located on the following angle:
If the target P1 has a velocity component
along the range direction, it exhibits the following Doppler shift:
In the course of the focusing process, this frequency error is transformed into an angular error denoted by
. Let us consider the differential version of (
2)
and equal this variation to (
4), then the differential of
is given by:
This parameter produces an azimuth target miss-location due to a range velocity component with respect to the radar platform. The Doppler phase variation from a point reflector can be observed through the output of the matched filter whose expression is:
where
is the range variation due to the SAR antenna motion along its aperture. According to
Figure 2, if the sensor is flying following the path
and the target is moving along
where
and
with
, it is possible to approximate the relative range variation
by that of a stationary reflector modified by a correction term due to the target movement. If
, then
Replacing
x and
y with the respective expressions in (
8) and neglecting the higher order terms,
can be expressed as:
where
and
The target velocity components of (
12) introduce an azimuth displacement as described by (
6). The velocities and accelerations,
, in Formula (
13), represent the contribution of the target to global acceleration and provide the variation of the Doppler frequency in the received signal. This result can be viewed as a smearing effect along azimuth and polarized in the same direction as the target’s speed. Thus, the existence of nonzero target speeds and accelerations leads to a quality degradation of the image contrast since the signal to clutter ratio decreases. This degradation effect is quantified through the following equation:
According to (
7), where
, the corresponding phase error
returns a defocusing and the reduction of the target contrast in the SAR image. The resulting frequency is given by the phase derivative
and covers the following bandwidth over the time interval
:
Now, from the differentiation of (
2),
and imposing that
, the azimuth resolution of the moving target becomes
. Using Equation (
1), we obtain:
By combining (
16) and (
14), the degraded azimuth resolution of moving targets can be estimated. The blurring significantly increases for fine-resolution mapping and highly squinted angles of observation. There is also a range resolution decrease due to the target range migration during the time of measurement. In the case of a non-accelerating target, the parameter
is dominant and according to
and Formulas (
16) and (
1) yields:
Recalling that the
, the target defocusing
can be expressed as:
which relates the defocusing length to the movement of the target during the time of measurement. Summarizing, moving targets produce significant position errors in the azimuth positioning due to the target range velocity component. Moreover, it leads to smearing effects on the focused signals in both range and cross-range directions. A pure displacement along the azimuth direction returns a pure defocusing along the same direction. All these effects are detected by two-dimensional normalized cross-correlation and tracked during the staring spotlight orbital time by the sub-pixel coregistration process. In the next subsection, this process is explained in detail.
2.2. Estimation Procedure
Sub-pixel offset tracking (SPOT) is a relevant technique to measure large-scale ground displacements in both range and azimuth directions. The technique is complementary to differential interferometric SAR and persistent scatterers interferometry when the radar phase information is unstable [
16,
17]. In this paper, we apply the above pixel tracking technique to a single spotlight image instead of multi-temporal interferometric images. Specifically, the single observation is divided into Doppler sub-apertures in order to investigate the fastest displacements of moving targets. Note that the acquisition duration is of the order of a few hundredths of a second.
With the above remarks in mind, we focus on maritime applications and estimate the displacement generated by the marine targets detected using a single SAR image focused in Doppler sub-apertures. In accordance with the temporal subdivision strategy of
Figure 3, we observe the offset trend by computing the normalized cross-correlation once the image is partitioned into small patches. The estimation procedure consists in shifting the master for each temporal event and calculating the correlation between adjacent Doppler sub-apertures, according to a small-temporal baseline strategy. In order to provide a more operational approach to the technique we used the software Sarproz, implemented by Prof. D. Perissin. The software is versatile because it provides the use of parallel computing and allows the possibility of designing all the coregistration parameters.
For the proposed estimation procedure, we set the cross-correlation window size to
pixels and the oversampling factor to 64 in both the range and azimuth directions. All the coregistration parameters are reported in Table 2. The offset components of the sub-pixel normalized cross-correlation, according to [
18,
19] are described by the complex parameter
which is estimated by the following equation:
Specifically, in (
19)
is the offset component (
18) generated by the earth displacement;
is the offset component generated by the earth displacement when located on highly sloped terrain;
is the offset caused by residual errors of the satellite orbits;
is the offset component generated by general attitude and control errors of the flying satellite trajectory;
and
are the contributions generated by the electromagnetic aberrations due to atmosphere parameters, space and time variations, and general disturbances due to thermal and quantization noise, respectively. The atmospheric time-variation during the very short acquisition time interval has little influence on the temporal component of the last displacement parameters because of its low accuracy. All errors are compensated for by choosing only high energy and stable points and subtracting the initial offsets in order to retrieve the shift contributions only generated by the target displacement.
As the concluding remark of this subsection, we note that the limits of the proposed procedure are mainly due to the maximum frequency of vibration observed and the minimum sensitivity in sensing vibration amplitudes. The first parameter is directly related to the sampling frequency. In fact, it is equal to the sampling frequency divided by two. For the specific case considered in the next section, 200 sub-apertures are produced over an acquisition time of 12 s. If we refer to this configuration, the time baseline is equal to 0.06 s. Thus, the maximum observation frequency is approximately 33 Hz, this means that it is possible to observe the vibrations generated by an endothermic engine running at 33–60 rpm. As for the minimum sensitivity, it is directly related to the spatial resolution of the sensor. In respect of the specific sensor used to assess the procedure, namely the SAR sensor of a CSK satellite, the spatial resolution is approximately one meter. In order to finalize a precise coregistration, we choose an over-sampling factor equal to 200. This value, in principle, allows dividing the single pixel range-azimuth into sub-pixels and, thanks to this, the minimum estimated displacement was equal to five millimeters.
2.3. Computational Architecture Description
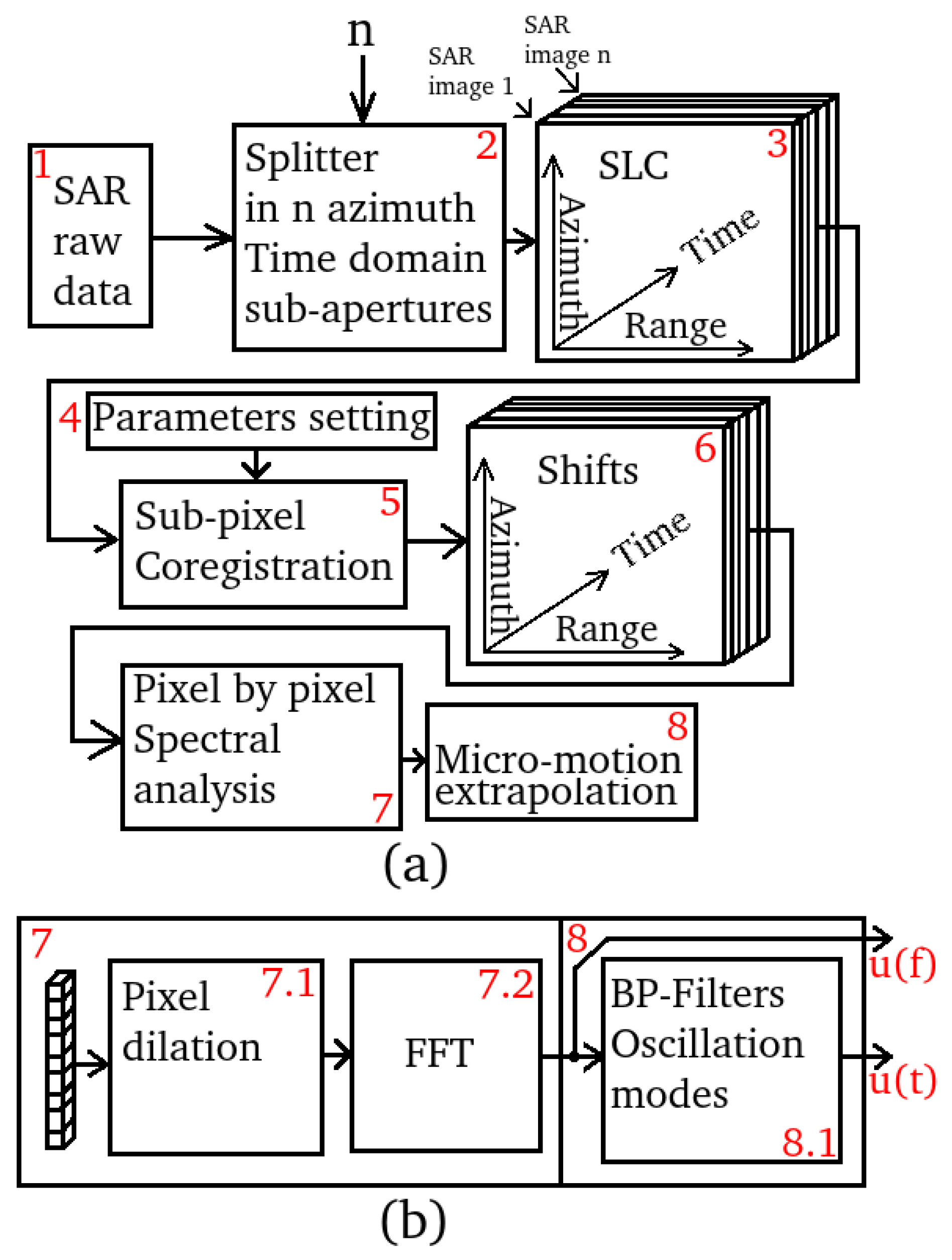
In this subsection, we describe in detail the processing chain used to perform the estimation of m-m. To this end, the block-scheme of the architecture is shown in
Figure 4a. The input of the processing architecture is a single raw dataset (block 1). The computational block 2 consists of a temporal
n-stage splitter that is responsible for generating
n temporal sub-apertures. In the numerical examples, we generate 200 sub-products. The duration of the full-band Doppler Spotlight acquisition is about 12 s. This means that the observation time increment between two contiguous sub-apertures is approximately 0.06 s. The aim of block 3 is to focus all the n sub-apertures. The final results are a time series of SAR images in the SLC configuration having lower resolution in azimuth. This resolution loss is inversely proportional to the lost Doppler band fraction. Note that SAR products generated by block 3 are not yet coregistered, this operation is implemented in block 5, which performs the sub-pixel coregistration whose setting parameters are generated by block 4. Specifically, the SAR acquisition characteristics summary and the coregistration settings are shown in
Table 1 and
Table 2 respectively. Moreover, the master of the multiple coregistration processes is selected according to the strategy referred to in the following as “small-temporal baseline” with the sliding master. The output of the co-recorder is represented by block 6. The result is a stack of maps of shifts in range and azimuth. Now, blocks 7 and 8 perform pixel by pixel analysis to estimate the oscillations of the ships.
Figure 4b represents a more detailed explanation of computational blocks 7 and 8. The input of block 7 consists of a single column of shifts, that for the case at hand, has a dimensionality of
. The vector of shifts is complex and after the coregistration process the displacements are estimated along both the range and azimuth direction. The computational block 7.1 interpolates the input data by a given factor. Next, block 7.2 carries out the operation of fast Fourier transform (FFT) in order to evaluate the oscillation modes on the slant coordinates identified by the pixel of the original image focused in the full band. Finally, block 8 performs the m-m extrapolation and is composed by a bank of bandpass filters in order to extrapolate the oscillations in the time domain. This block returns
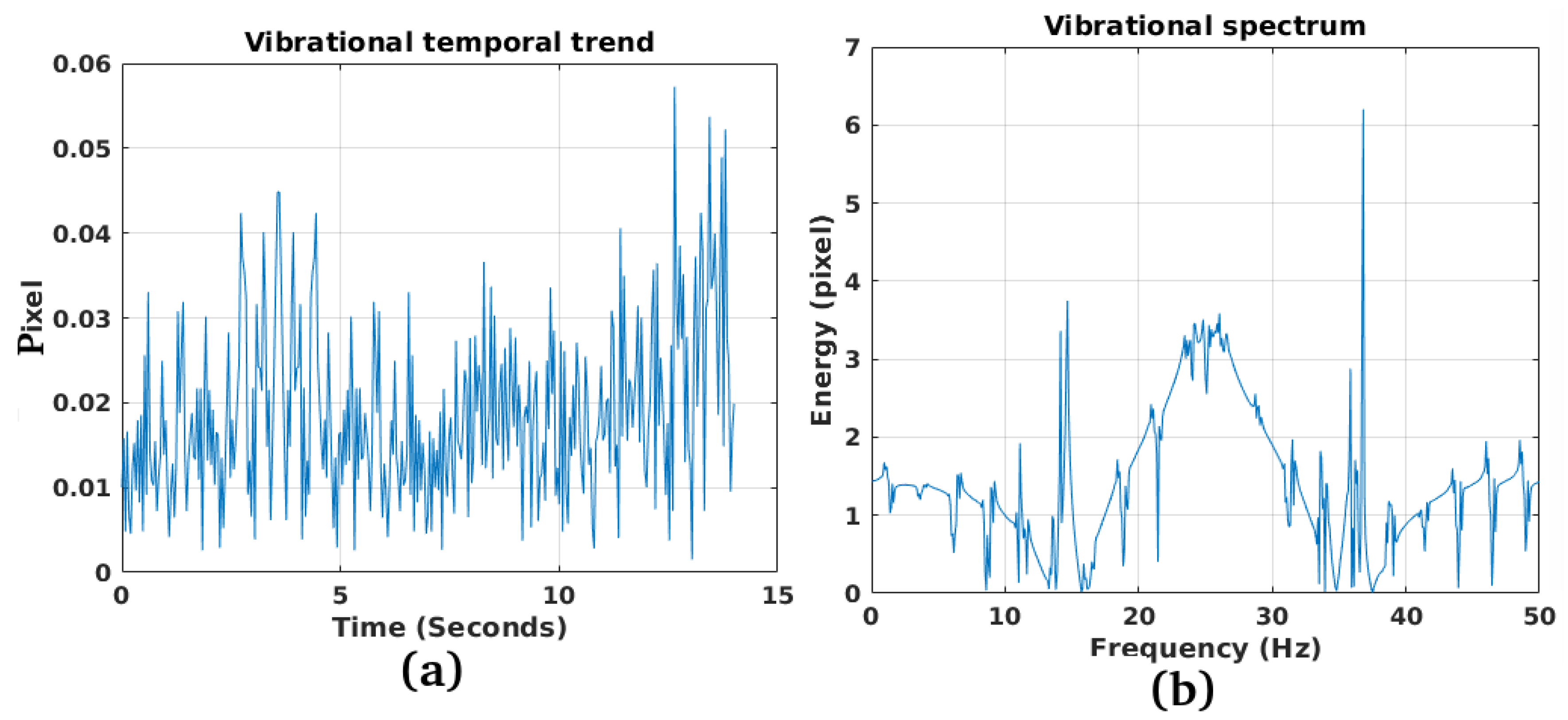
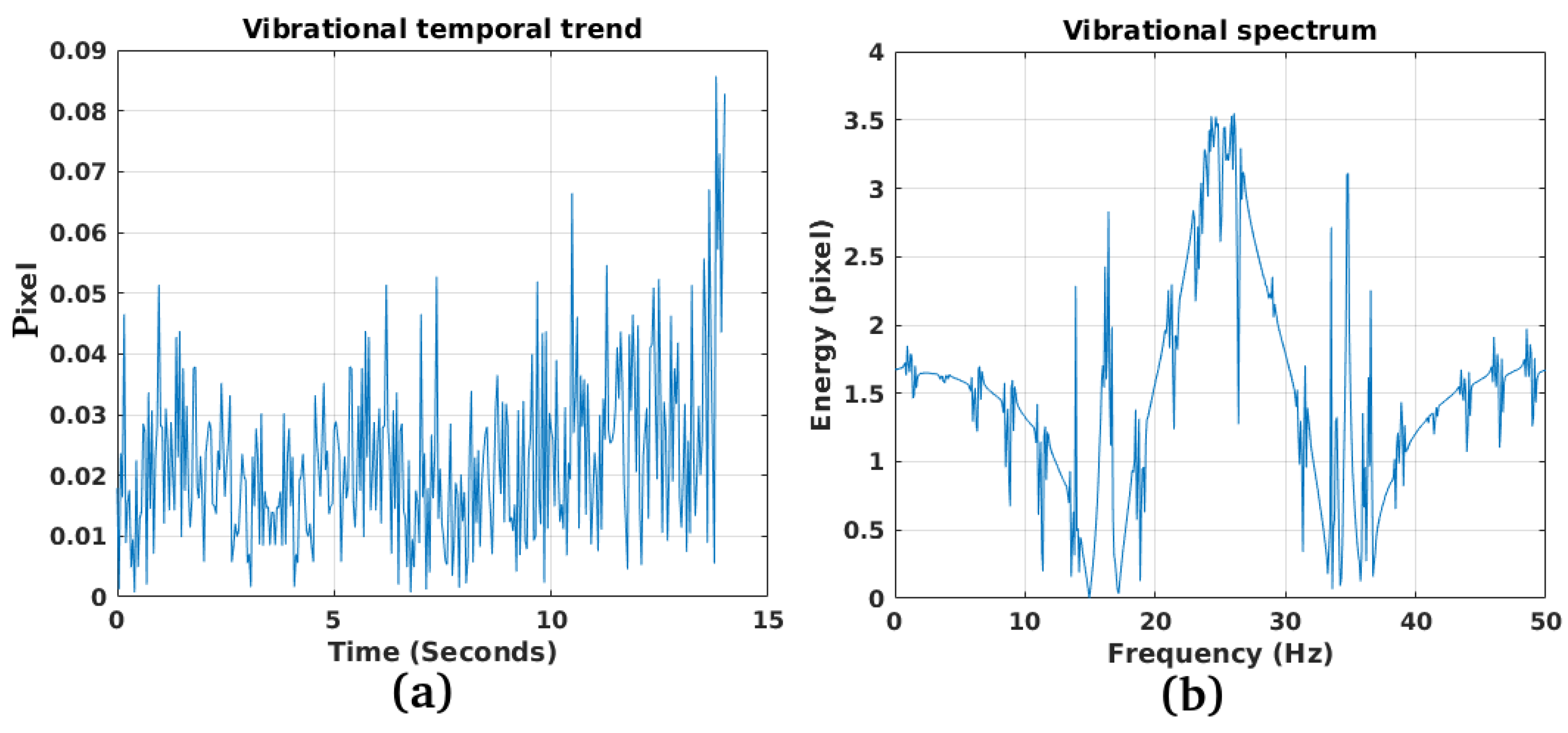
and
which describe the m-m in the time and frequency domain, respectively. The nature of the time-domain displacement estimable using this technique is extended along the SAR range and azimuth dimensions. The vibrations observed predominantly are those in the low frequencies, compatible with those generated by the endothermic engines used for the production of the on-board electrical energy.



























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}