Deep Fully Convolutional Networks for Cadastral Boundary Detection from UAV Images




Abstract
:1. Introduction
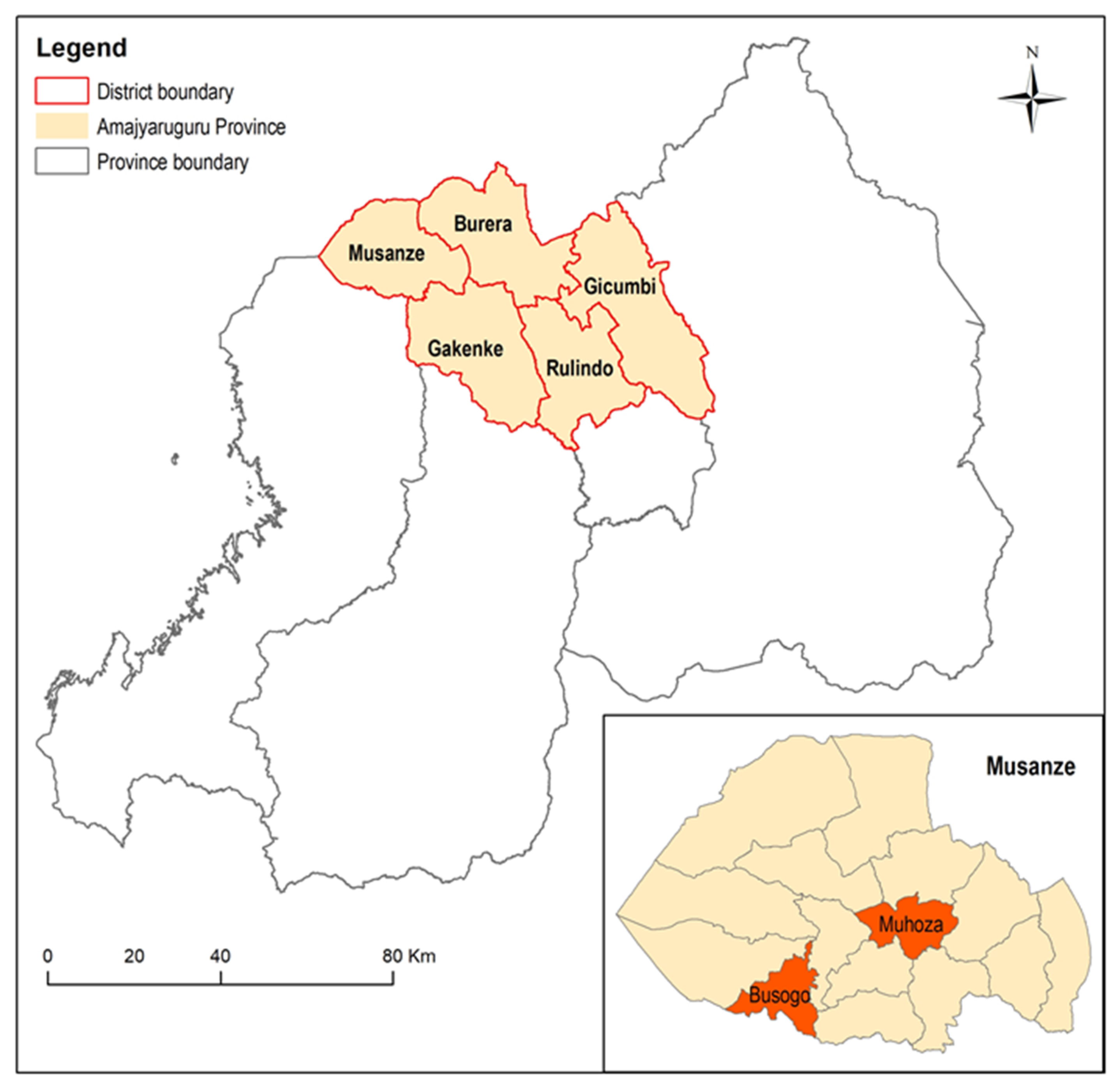
2. Study Area
3. Materials and Methods
3.1. Data Preparation
3.2. Boundary Detection
3.2.1. Fully Convolutional Networks
3.2.2. Globalized Probability of Boundary (gPb)
3.2.3. Multi-Resolution Segmentation (MRS)
3.3. Accuracy Assessment
4. Results
5. Discussion
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Luo, X.; Bennett, R.M.; Koeva, M.; Lemmen, C. Investigating Semi-Automated Cadastral Boundaries Extraction from Airborne Laser Scanned Data. Land 2017, 6, 60. [Google Scholar] [CrossRef]
- Williamson, I. The justification of cadastral systems in developing countries. Geomatica 1997, 51, 21–36. [Google Scholar]
- Enemark, S.; Mclaren, R.; Lemmen, C.; Antonio, D.; Gitau, J.; De Zeeuw, K.; Dijkstra, P.; Quinlan, V.; Freccia, S. Fit-For-Purpoes Land Administration: Guiding Principles for Country Implementation; GLTN: Nairobi, Kenya, 2016. [Google Scholar]
- Enemark, S.; Bell, K.C.; Lemmen, C.; McLaren, R. Fit-For-Purpose Land Administration; International Federation of Surveyors: Copenhagen, Denmark, 2014; p. 44. [Google Scholar]
- Ramadhani, S.A.; Bennett, R.M.; Nex, F.C. Exploring UAV in Indonesian cadastral boundary data acquisition. Earth Sci. Inform. 2018, 11, 129–146. [Google Scholar] [CrossRef]
- Crommelinck, S.; Bennett, R.; Gerke, M.; Nex, F.; Yang, M.; Vosselman, G. Review of Automatic Feature Extraction from High-Resolution Optical Sensor Data for UAV-Based Cadastral Mapping. Remote Sens. 2016, 8, 689. [Google Scholar] [CrossRef]
- Pal, N.R.; Pal, S.K. A review on image segmentation techniques. Pattern Recognit. 1993, 26, 1277–1294. [Google Scholar] [CrossRef]
- García-Pedrero, A.; Gonzalo-Martín, C.; Lillo-Saavedra, M. A machine learning approach for agricultural parcel delineation through agglomerative segmentation. Int. J. Remote Sens. 2017, 38, 1809–1819. [Google Scholar] [CrossRef] [Green Version]
- Drǎguţ, L.; Csillik, O.; Eisank, C.; Tiede, D. Automated parameterisation for multi-scale image segmentation on multiple layers. ISPRS J. Photogramm. Remote Sens. 2014, 88, 119–127. [Google Scholar] [CrossRef] [PubMed]
- Li, Y.; Wang, S.; Tian, Q.; Ding, X. A survey of recent advances in visual feature detection. Neurocomputing 2015, 149, 736–751. [Google Scholar] [CrossRef]
- Arbeláez, P.; Maire, M.; Fowlkes, C.; Malik, J. Contour Detection and Hierarchical Image Segmentation. IEEE Trans. Pattern Anal. Mach. Intell. 2011, 33, 898–916. [Google Scholar] [CrossRef] [PubMed]
- Zhu, X.X.; Tuia, D.; Mou, L.; Xia, G.-S.; Zhang, L.; Xu, F.; Fraundorfer, F. Deep Learning in Remote Sensing: A Comprehensive Review and List of Resources. IEEE Geosci. Remote Sens. Mag. 2017, 5, 8–36. [Google Scholar] [CrossRef] [Green Version]
- Bergado, J.R.; Persello, C.; Gevaert, C. A Deep Learning Approach to the Classification of sub-decimetre Resolution Aerial Images. In Proceedings of the IEEE International Geoscience and Remote Sensing Symposium, Beijing, China, 10–15 July 2016; pp. 1516–1519. [Google Scholar]
- LeCun, Y.; Bengio, Y.; Hinton, G. Deep learning. Nature 2015, 521, 436–444. [Google Scholar] [CrossRef] [PubMed]
- Shelhamer, E.; Long, J.; Darrell, T. Fully Convolutional Networks for Semantic Segmentation. IEEE Trans. Pattern Anal. Mach. Intell. 2017, 39, 640–651. [Google Scholar] [CrossRef] [PubMed]
- Maurice, M.J.; Koeva, M.N.; Gerke, M.; Nex, F.; Gevaert, C. A photogrammetric approach for map updating using UAV in Rwanda. In Proceedings of the GeoTechRwanda 2015, Kigali, Rwanda, 18–20 November 2015; pp. 1–8. [Google Scholar]
- Stöcker, C.; Ho, S.; Nkerabigwi, P.; Schmidt, C.; Koeva, M.; Bennett, R.; Zevenbergen, J. Unmanned Aerial System Imagery, Land Data and User Needs: A Socio-Technical Assessment in Rwanda. Remote Sens. 2019, 11, 1035. [Google Scholar] [CrossRef]
- Persello, C.; Stein, A. Deep Fully Convolutional Networks for the Detection of Informal Settlements in VHR Images. IEEE Geosci. Remote Sens. Lett. 2017, 14, 2325–2329. [Google Scholar] [CrossRef] [Green Version]
- Ioffe, S.; Szegedy, C. Batch Normalization: Accelerating Deep Network Training by Reducing Internal Covariate Shift. In Proceedings of the International Conference on Machine Learning, Lille, France, 6–11 July 2015. [Google Scholar]
- He, K.; Zhang, X.; Ren, S.; Sun, J. Delving Deep into Rectifiers: Surpassing Human-Level Performance on ImageNet Classification. In Proceedings of the 2015 IEEE International Conference on Computer Vision (ICCV), Santiago, Chile, 7–13 December 2015; pp. 1–11. [Google Scholar] [CrossRef]
- Martin, D.R.; Fowlkes, C.C.; Malik, J. Learning to detect natural image boundaries using local brightness, color, and texture cues. IEEE Trans. Pattern Anal. Mach. Intell. 2004, 26, 530–549. [Google Scholar] [CrossRef] [PubMed]
- Baatz, M.; Schäpe, A. Multiresolution Segmentation: An Optimization Approach for High Quality Multi-Scale Image Segmentation; Wichmann Verlag: Karlsruhe, Germany, 2000. [Google Scholar]
- Nyandwi, E.; Koeva, M.; Kohli, D.; Bennett, R.; Nyandwi, E.; Koeva, M.; Kohli, D.; Bennett, R. Comparing Human Versus Machine-Driven Cadastral Boundary Feature Extraction. Remote Sens. 2019, 11, 1662. [Google Scholar] [CrossRef]
- IAAO. Standard on Digital Cadastral Maps and Parcel Identifiers; International Association of Assessing Officers: Kansas City, MO, USA, 2015. [Google Scholar]
- Hossin, M.; Sulaiman, M.N. Review on Evaluation Metrics for Data Classification Evaluations. Int. J. Data Min. Knowl. Manag. Process 2015, 5, 1–11. [Google Scholar] [CrossRef]
- Wassie, Y.A.; Koeva, M.N.; Bennett, R.M.; Lemmen, C.H.J. A procedure for semi-automated cadastral boundary feature extraction from high-resolution satellite imagery. J. Spat. Sci. 2018, 63, 75–92. [Google Scholar] [CrossRef]
- Persello, C.; Tolpekin, V.A.; Bergado, J.R.; de By, R.A. Delineation of agricultural fields in smallholder farms from satellite images using fully convolutional networks and combinatorial grouping. Remote Sens. Environ. 2019, 231, 111253. [Google Scholar] [CrossRef]
- Goodfellow, I.J.; Pouget-Abadie, J.; Mirza, M.; Xu, B.; Warde-Farley, D.; Ozair, S.; Courville, A.; Bengio, Y. Generative Adversarial Networks. In Proceedings of the Neural Information Processing Systems, Montreal, QC, Canada, 8–13 December 2014; pp. 2672–2680. [Google Scholar]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Object class | Visible Cadastral Boundary | |
| Input data | 0.1 m × 0.1 m UAV image | |
| Reference frame | Coordinate System: WGS 1984 UTM zone 35S Projection: Transverse Mercator False Easting: 500,000 False Northing: 10,000,000 Central Meridian: 27 Scale factor: 0.9996 Latitude of origin: 0.000 Units: Meter | |
| Definition | A visible cadastral boundary is a line of geographical features representing limits of an entity considered to be a single area under homogeneous real property rights and unique ownership. | |
| Identifying visible cadastral boundaries |  | (a) Strip of stone (b) Water drainage (c) Road ridges (d) Fences(e) Textural pattern transition (f) Edge of rooftop |
| Extraction |
| |
| Positive Prediction | Negative Prediction | |
|---|---|---|
| Positive Class | True Positive (TP) | False Negative (FN) |
| Negative Class | False Positive (FP) | True Negative (TN) |
| Algorithm | Reference | TS1 | TS2 | ||||
|---|---|---|---|---|---|---|---|
| P | R | F | P | R | F | ||
| FCN | visible | 0.75 | 0.65 | 0.70 | 0.74 | 0.45 | 0.56 |
| invisible | 0.06 | 0.07 | 0.06 | 0.06 | 0.09 | 0.07 | |
| all | 0.78 | 0.39 | 0.52 | 0.79 | 0.35 | 0.48 | |
| gPb-owt-ucm | visible | 0.21 | 0.87 | 0.34 | 0.23 | 0.93 | 0.37 |
| invisible | 0.03 | 0.19 | 0.06 | 0.04 | 0.39 | 0.07 | |
| all | 0.24 | 0.57 | 0.33 | 0.26 | 0.78 | 0.39 | |
| MRS | visible | 0.19 | 0.82 | 0.31 | 0.18 | 0.90 | 0.30 |
| invisible | 0.05 | 0.27 | 0.08 | 0.04 | 0.56 | 0.08 | |
| all | 0.23 | 0.57 | 0.33 | 0.22 | 0.80 | 0.35 | |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xia, X.; Persello, C.; Koeva, M. Deep Fully Convolutional Networks for Cadastral Boundary Detection from UAV Images. Remote Sens. 2019, 11, 1725. https://doi.org/10.3390/rs11141725
Xia X, Persello C, Koeva M. Deep Fully Convolutional Networks for Cadastral Boundary Detection from UAV Images. Remote Sensing. 2019; 11(14):1725. https://doi.org/10.3390/rs11141725
Chicago/Turabian StyleXia, Xue, Claudio Persello, and Mila Koeva. 2019. "Deep Fully Convolutional Networks for Cadastral Boundary Detection from UAV Images" Remote Sensing 11, no. 14: 1725. https://doi.org/10.3390/rs11141725
APA StyleXia, X., Persello, C., & Koeva, M. (2019). Deep Fully Convolutional Networks for Cadastral Boundary Detection from UAV Images. Remote Sensing, 11(14), 1725. https://doi.org/10.3390/rs11141725