Multisensor Characterization of Urban Morphology and Network Structure

Abstract
:
1. Introduction
2. Materials and Methods
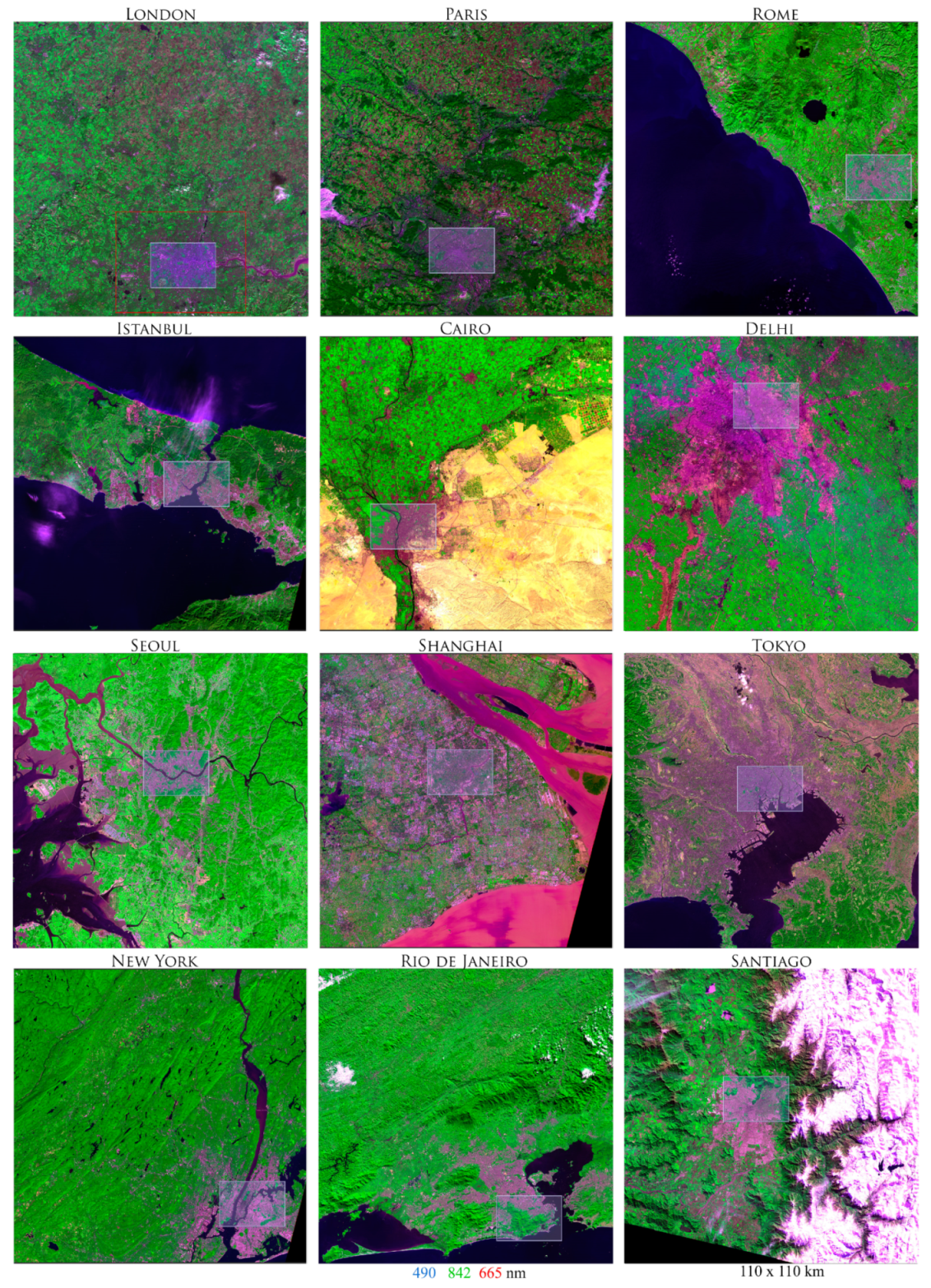
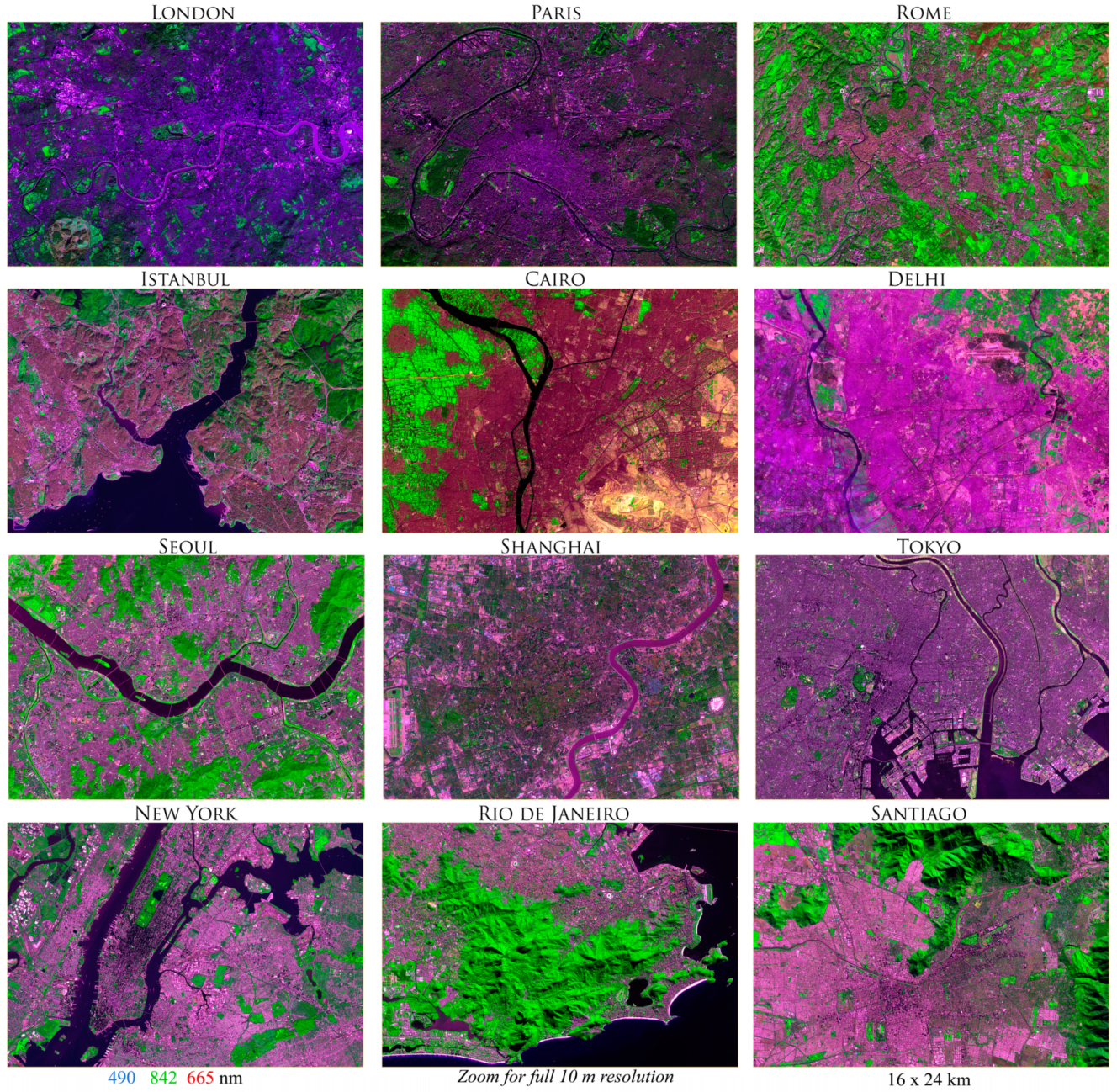
2.1. Multi-Season Spectral Characterization of Urban Land Cover
2.2. Network Identification by Progressive Segmentation
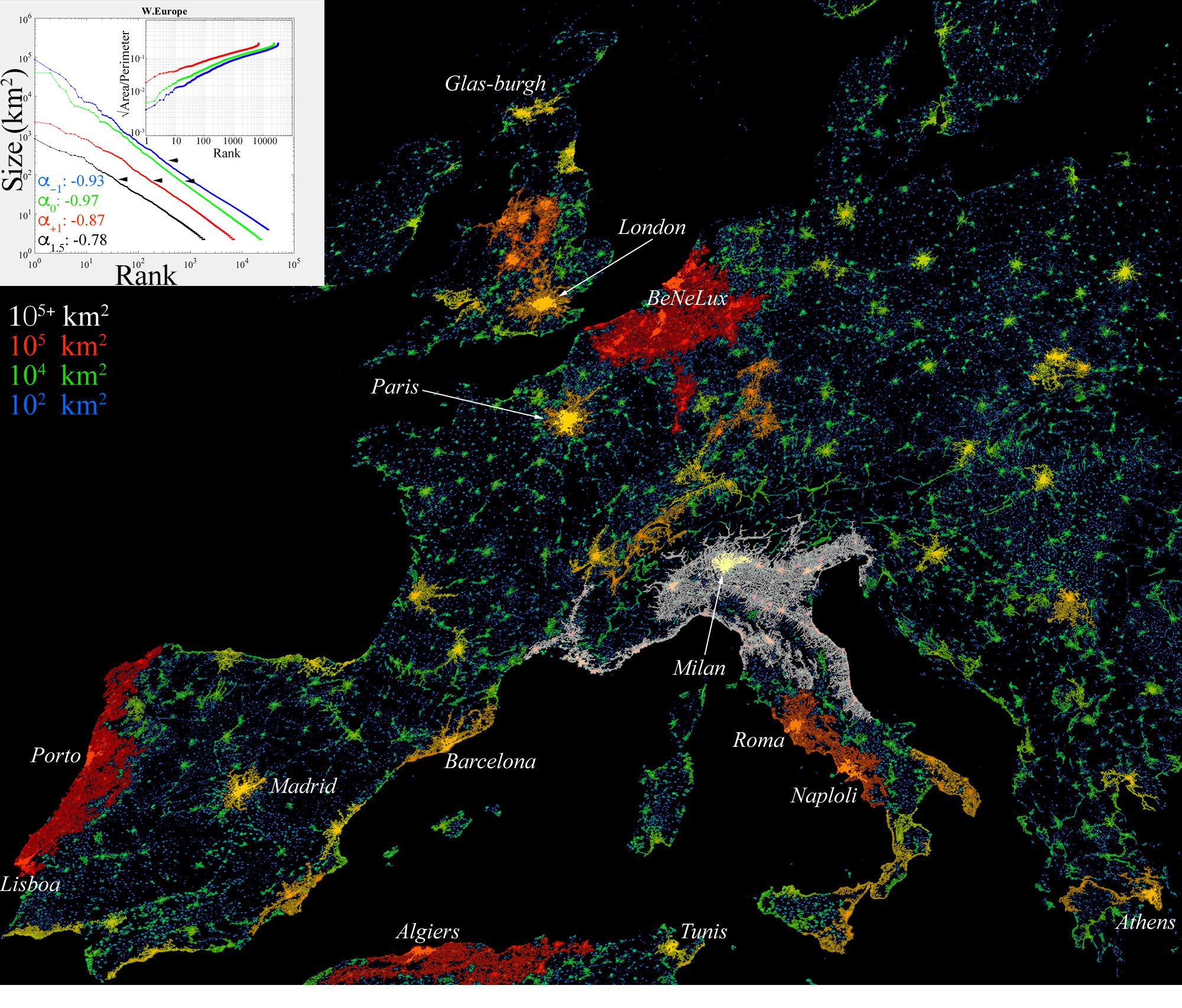
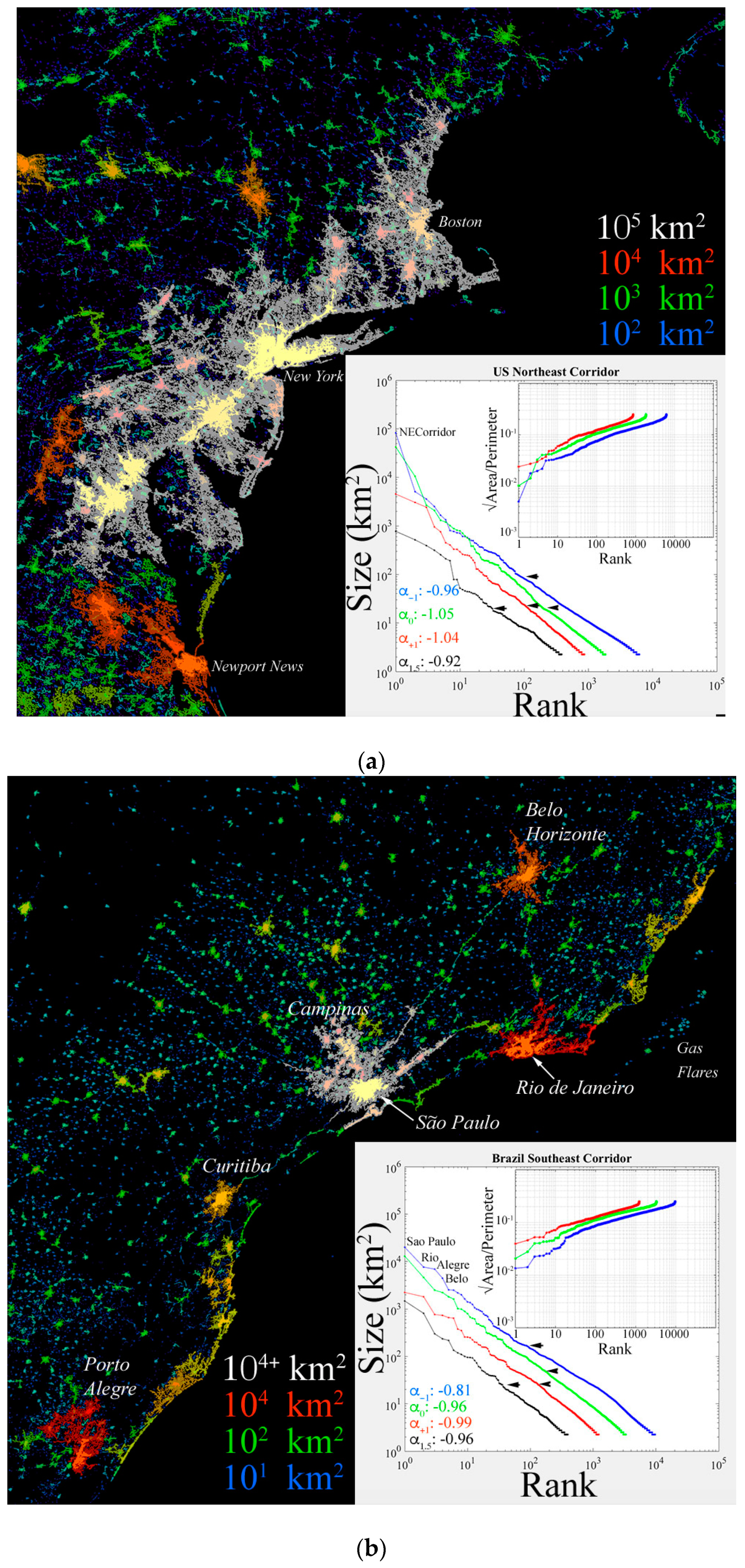
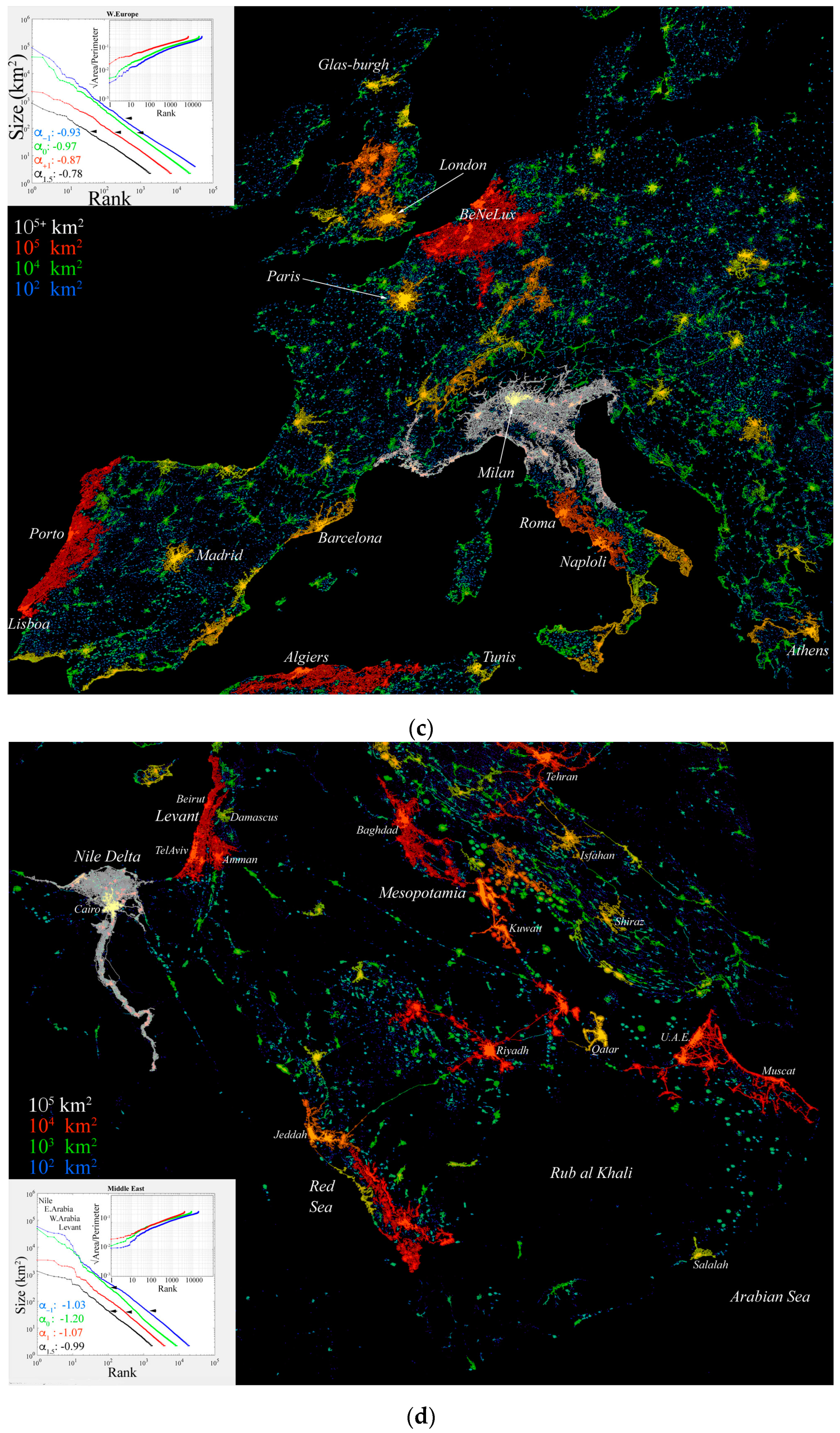
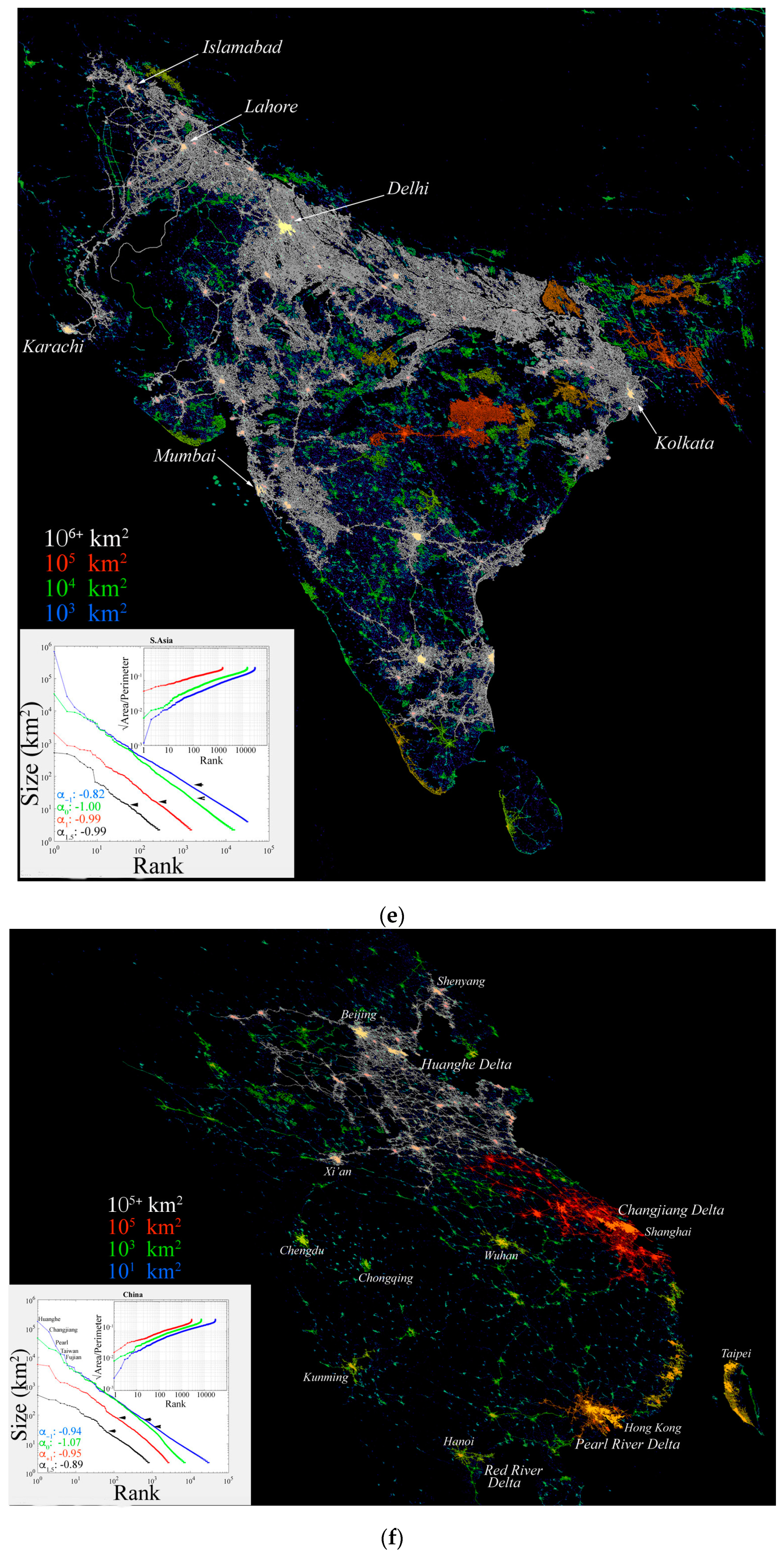
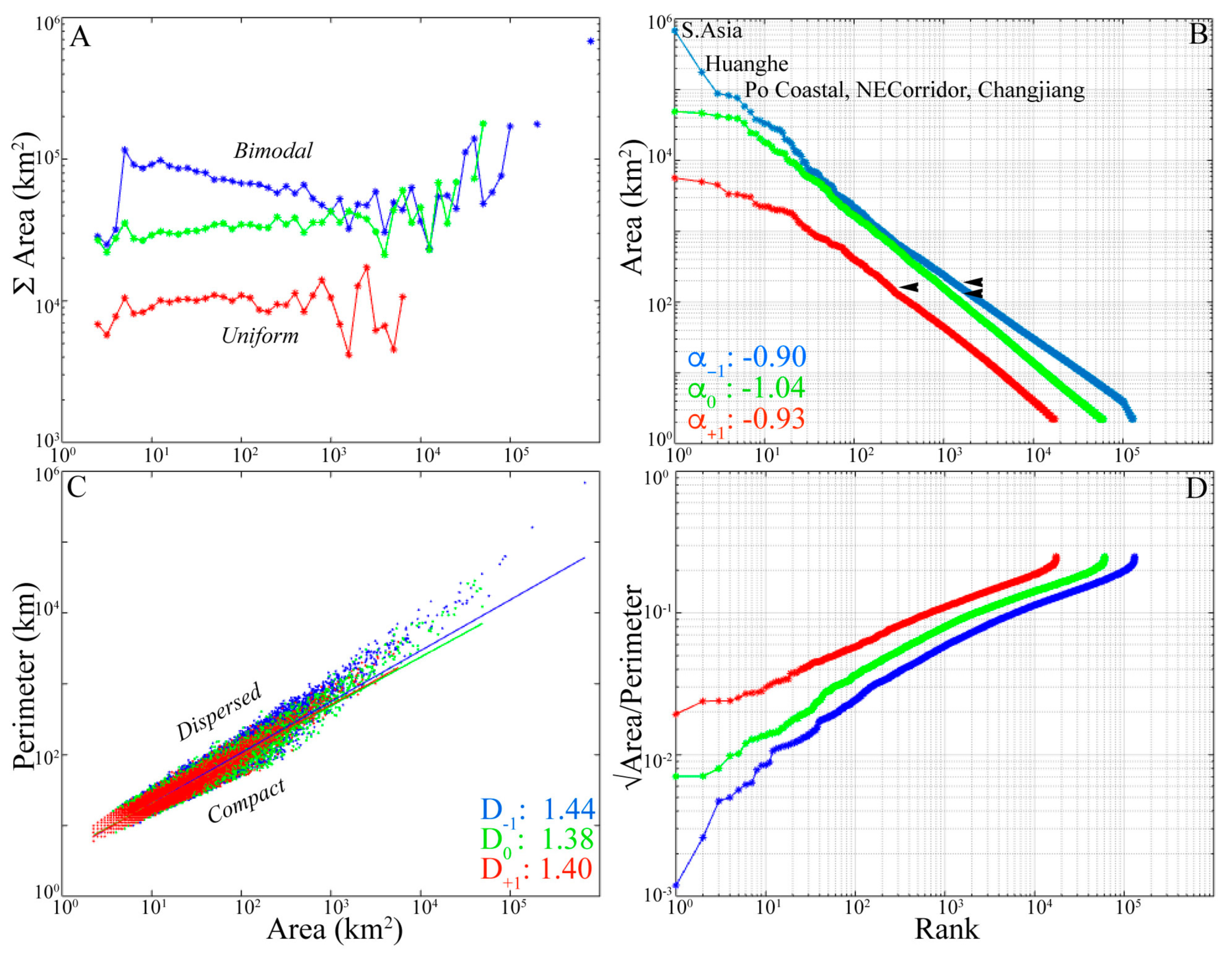
2.3. Morphology Characterization by Area-Perimeter Distribution
2.4. Network Characterization by Rank-Size and Rank-Shape Distribution
3. Results
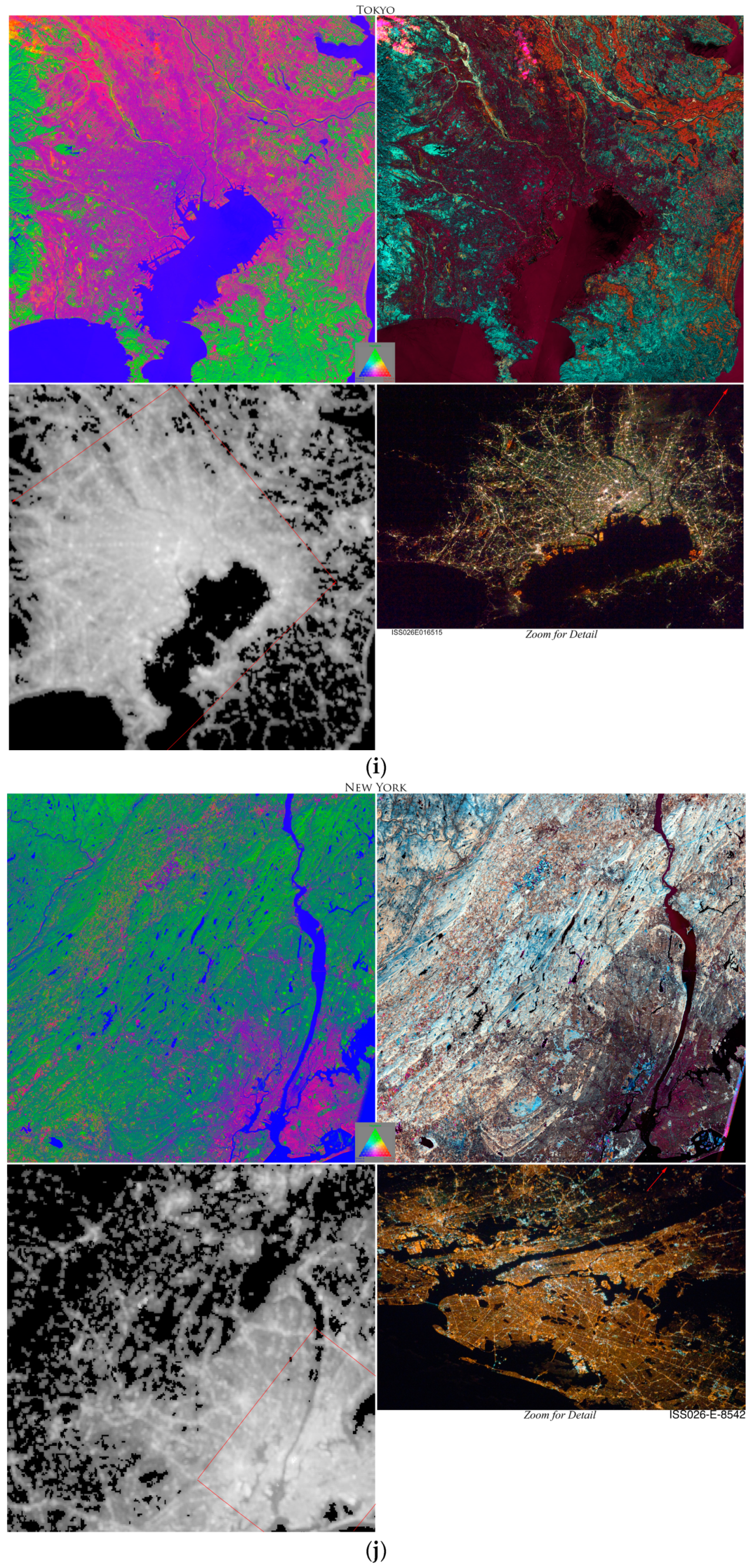
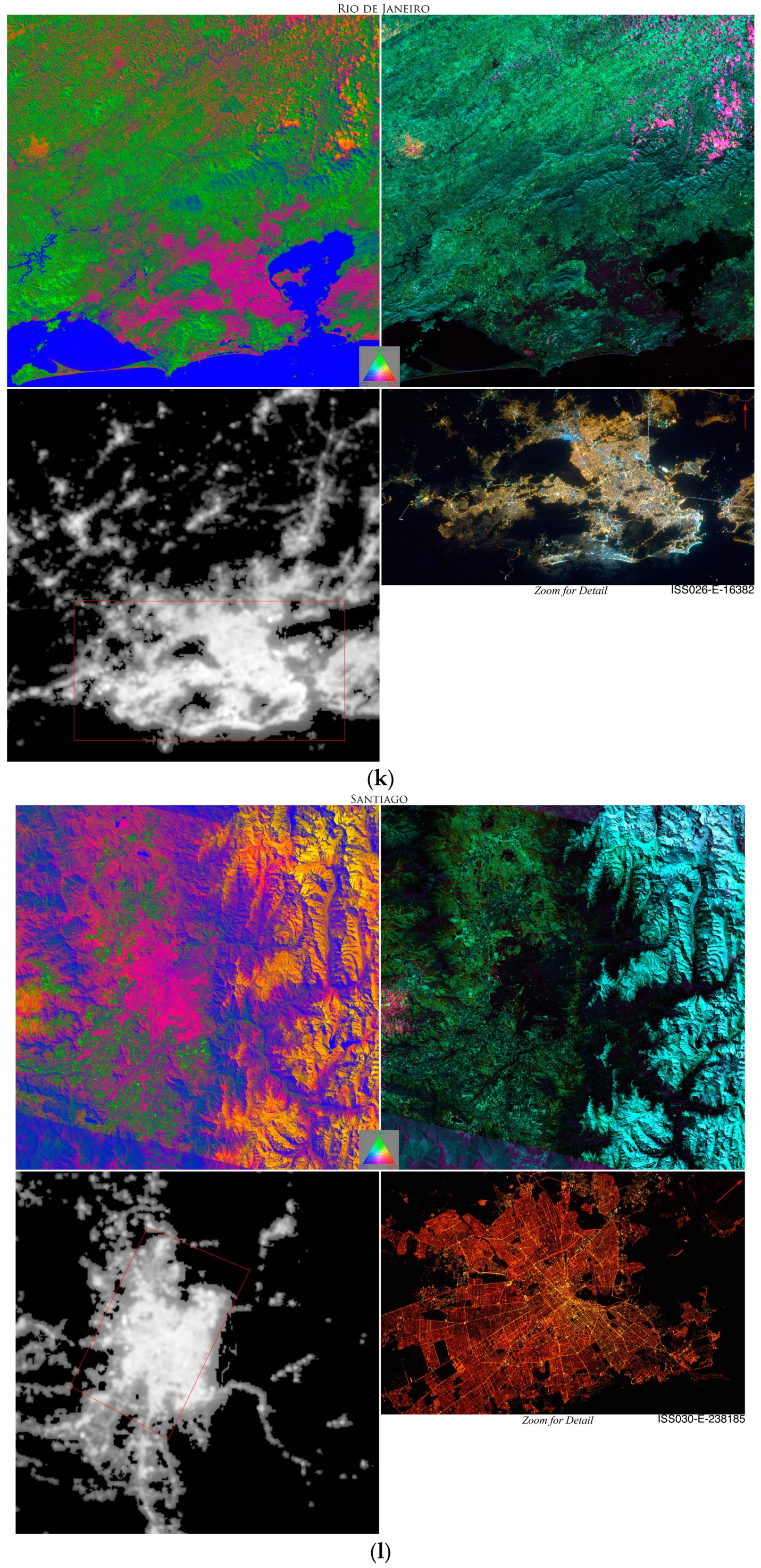
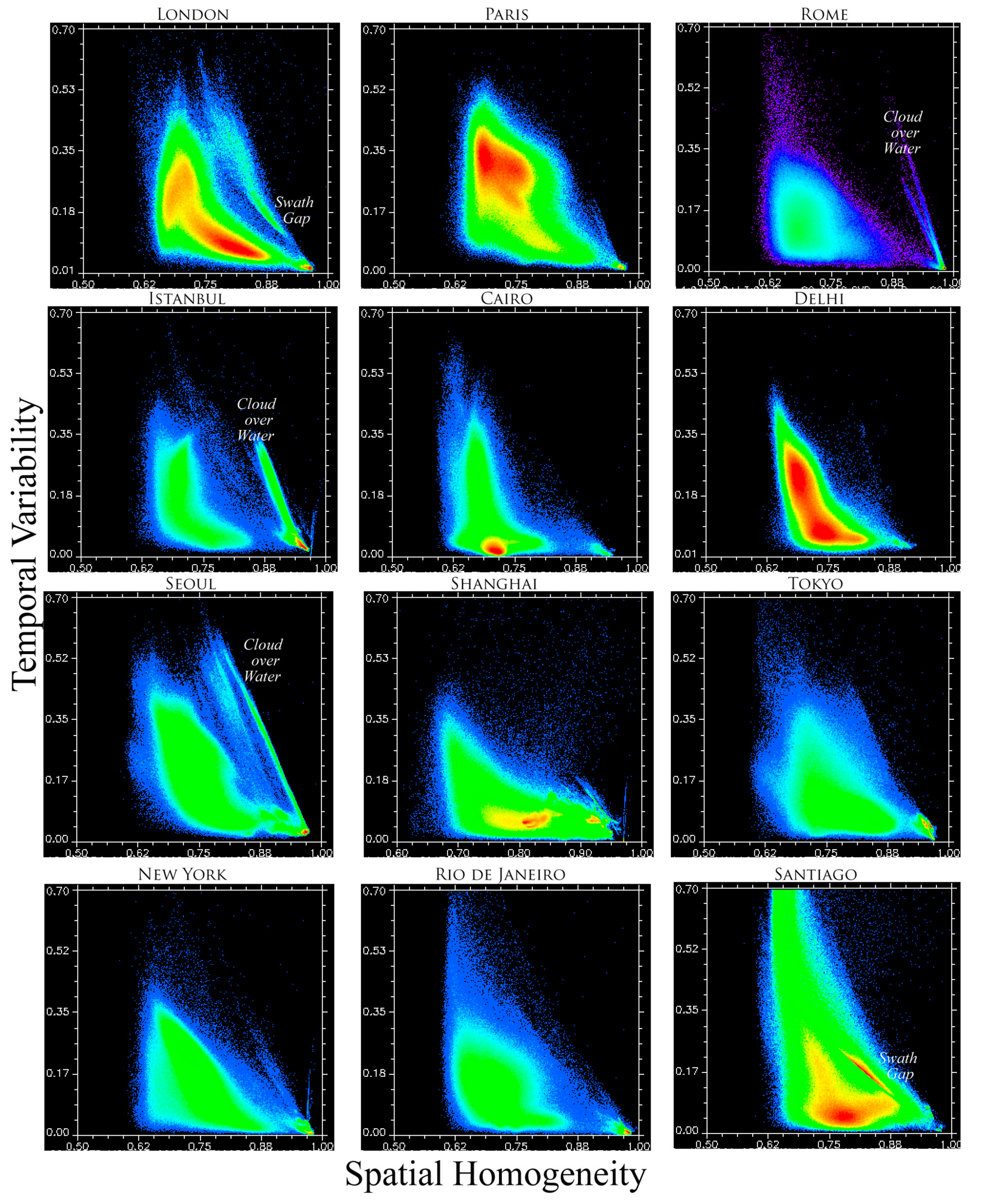
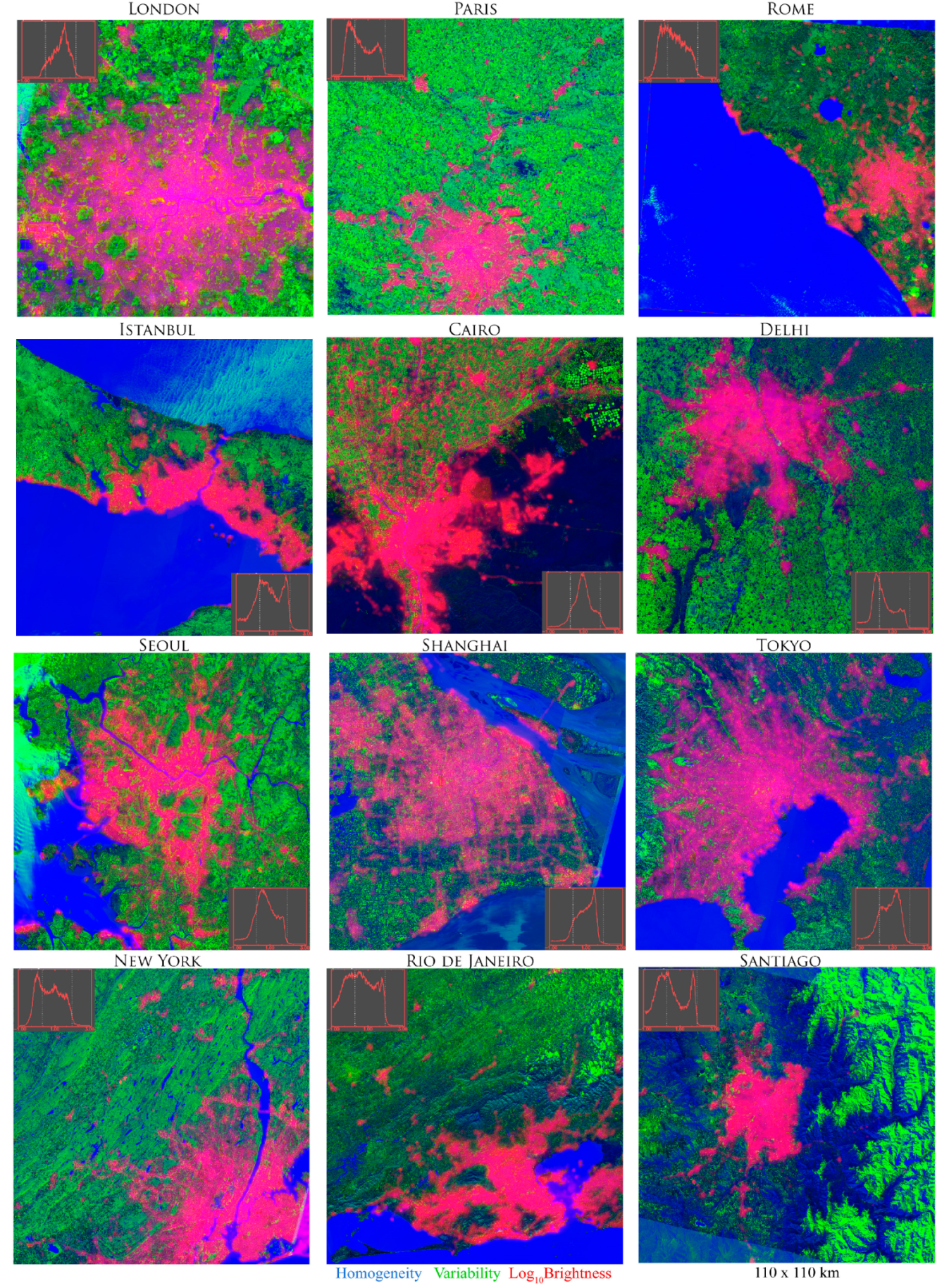
3.1. Consistency of Spectrotemporal Characteristics
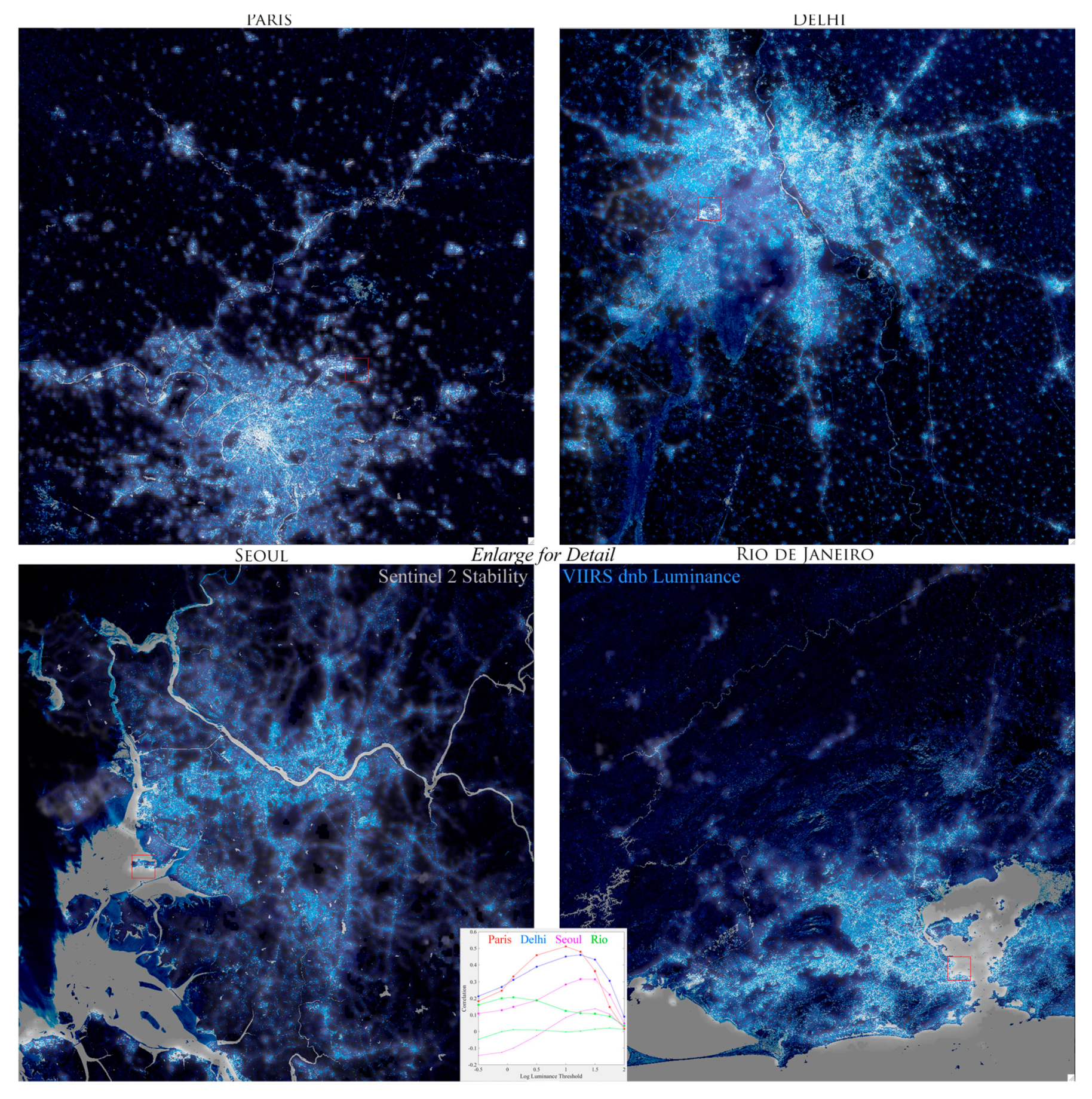
3.2. VIIRS + Sentinel Comparisons
3.3. Progressive Evolution of Morphology and Spatial Network Structure
4. Discussion
4.1. Characterizing Urban Morphology and Network Structure
4.2. What VIIRS Reveals
4.3. The Nature of Light Sources
4.4. Contrasting Forms of Urban Morphology and Network Structure
5. Conclusions
Funding
Acknowledgments
Conflicts of Interest
References
- Mesev, V.; Longley, P.; Batty, M.; Xie, Y. Morphology from imagery: Detecting and measuring the density of urban land use. Environ. Plan. A 1995, 27, 759–780. [Google Scholar] [CrossRef]
- Batty, M.; Longley, P. Fractal Cities; Academic Press: London, UK; San Diego, CA, USA, 1996; p. 394. [Google Scholar]
- Mesev, V. Remotely Sensed Cities—An Introduction; CRC Press: London UK, 2003; p. 433. [Google Scholar]
- Deuskar, C. What does urban mean? In Sustainable Cities; World Bank: Washington, DC, USA, 2015. [Google Scholar]
- Forster, B.C. An examination of some problems and solutions in monitoring urban areas from satellite platforms. Int. J. Remote Sens. 1985, 6, 139–151. [Google Scholar] [CrossRef]
- Small, C. The Color of Cities: An Overview of Urban Spectral Diversity. In Global Mapping of Human Settlements; Herold, M., Gamba, P., Eds.; Taylor and Francis: Didecott, UK, 2009; pp. 59–106. [Google Scholar]
- Du, P.; Liu, P.; Xia, J.; Feng, L.; Liu, S.; Tan, K.; Cheng, L. Remote Sensing Image Interpretation for Urban Environment Analysis: Methods, System and Examples. Remote Sens. 2014, 6, 9458–9474. [Google Scholar] [CrossRef] [Green Version]
- Auerbach, F. Das Gesetz der Bevolkerungskonzentration. Petermanns Geogr. Mitt. 1913, 59, 74–76. [Google Scholar]
- Soo, K.T. Zipf’s Law for cities: A cross-country investigation. Reg. Sci. Urban Econ. 2005, 35, 239–263. [Google Scholar] [CrossRef]
- Small, C.; Elvidge, C.D.; Balk, D.; Montgomery, M. Spatial Scaling of Stable Night Lights. Remote Sens. Environ. 2011, 115, 269–280. [Google Scholar] [CrossRef]
- Small, C.; Sousa, D. Spatial Scaling of Land Cover Networks. arXiv 2015, arXiv:1512.01517. [Google Scholar]
- Elvidge, C.D.; Baugh, K.; Zhizhin, M.; Hus, F.C.; Ghosh, T. VIIRS night-time lights. Int. J. Remote Sens. 2017, 38, 5860–5879. [Google Scholar] [CrossRef]
- Elvidge, C.D.; Baugh, K.E.; Zhizhin, M.; Hsu, F.C. Why VIIRS data are superior to DMSP for mapping nighttime lights. In Proceedings of the Asia-Pacific Advanced Network, Honolulu, HI, USA, 13–16 January 2013; Volume 35, pp. 62–69. [Google Scholar]
- Small, C. Multisource Imaging of Urban Growth and Infrastructure Using Landsat, Sentinel and SRTM. In Proceedings of the NASA Landsat-Sentinel Science Team Meeting, Rockville, MD, USA, 3–5 April 2018. [Google Scholar]
- Small, C.; Nghiem, S.V. A continuous infrastructure index for mapping human settlements. In Proceedings of the NASA Multi-source Land Imaging Landsat-Sentinel Science Team Meeting, Bethesda, MD, USA, 20–21 April 2016. [Google Scholar]
- Small, C.; Machado, R.P.P.; Barrozo, L.V.; Luchiari, A. Mapping decades of urban growth and development with multi-temporal spectral mixture models. In Proceedings of the XVII SBSR—Simpósio Brasileiro de Sensoriamento Remoto, João Pessoa, Brazil, 25–29 April 2015. [Google Scholar]
- Small, C.; Milesi, C.; Elvidge, C.; Baugh, K.; Henebry, G.M.; Nghiem, S.V. The Land Cover Continuum; Multi-sensor Characterization of Human-Modified Landscapes. In Proceedings of the EARSeL/NASA Joint Workshop on Land Use and Land Cover Berlin, Berlin, Germany, 17–18 March 2014. [Google Scholar]
- Small, C.; Okujeni, A.; Van der Linden, S.; Waske, B. Remote Sensing of Urban Environments. In Comprehensive Remote Sensing; Liang, S., Ed.; Elsevier: Oxford, UK, 2018; Volume 6, pp. 96–127. [Google Scholar]
- Small, C.; Pozzi, F.; Elvidge, C.D. Spatial analysis of global urban extent from DMSP-OLS night lights. Remote Sens. Environ. 2005, 96, 277–291. [Google Scholar] [CrossRef]
- Small, C.; Sousa, D. Humans on Earth: Global Extents of Anthropogenic Land Cover from Remote Sensing. Anthropocene 2016, 14, 1–33. [Google Scholar] [CrossRef]
- Clauset, A.; Shalizi, C.R.; Newman, M.E.J. Power-law distributions in empirical data. SIAM Rev. 2009, 51, 661–703. [Google Scholar] [CrossRef]
- Imhoff, M.L.; Lawrence, W.T.; Elvidge, C.D.; Paul, T.; Levine, E.; Privalsky, M.V. Using nighttime DMSP/OLS images of city lights to estimate the impact of urban land use on soil resources in the United States. Remote Sens. Environ. 1997, 59, 105–117. [Google Scholar] [CrossRef]
- Elvidge, C.D.; Baugh, K.E.; Kihn, E.A.; Kroehl, H.W.; Davis, E.R. Mapping city lights with nighttime data from the DMSP Operational Linescan System. Photogramm. Eng. Remote Sens. 1997, 63, 727–734. [Google Scholar]
- Levin, N.; Zhang, Q. A global analysis of factors controlling VIIRS nighttime light levels fromdensely populated areas. Remote Sens. Environ. 2017, 190, 366–382. [Google Scholar] [CrossRef]
- Small, C.; Elvidge, C.D.; Baugh, K. Mapping urban structure and spatial connectivity with VIIRS and OLS night light imagery. In Proceedings of the Joint Urban Remote Sensing Event, Sao Paulo, Brazil, 21–23 April 2013; pp. 230–233. [Google Scholar]
- Yu, B.; Tang, M.; Wu, Q.; Yang, C.; Deng, S.; Shi, K.; Peng, C.; Wu, J.; Chen, Z. Urban Built-Up Area Extraction From Log- Transformed NPP-VIIRS Nighttime Light Composite Data. IEEE Geosci. Remote Sens. Lett. 2018, 15, 1279–1283. [Google Scholar] [CrossRef]
- Batty, M. Hierarchy in Cities and City Systems. In Hierarchy in Natural and Social Sciences; Pumain, D., Ed.; Springer: Berlin/Heidelberg, Germany, 2006; Volume 3, pp. 143–168. [Google Scholar]
- Pumain, D. Alternative explanations of hierarchical differentiation in urban systems. In Hierarchy in Natural and Social Sciences; Pumain, D., Ed.; Springer: Berlin/Heidelberg, Germany, 2006; Volume 3, pp. 169–222. [Google Scholar]
- Small, C.; Elvidge, C.D. Night on Earth: Mapping decadal changes of anthropogenic night light in Asia. Int. J. Appl. Earth Obs. Geoinf. 2013, 22, 40–52. [Google Scholar] [CrossRef] [Green Version]
- Kuechly, H.U.; Kyba, C.C.M.; Ruhtz, T.; Lindemann, C.; Wolter, C.; Fischer, J.; Hölker, F. Aerial survey and spatial analysis of sources of light pollution in Berlin, Germany. Remote Sens. Environ. 2012, 126, 39–50. [Google Scholar] [CrossRef]
- Hale, J.D.; Davies, G.; Fairbrass, A.J.; Matthews, T.J.; Rogers, C.D.F.; Sadler, J.P. Mapping Lightscapes: Spatial Patterning of Artificial Lighting in an Urban Landscape. PLoS ONE 2013, 8, e61460. [Google Scholar] [CrossRef]
- Levin, N.; Johansen, K.; Hacker, J.M.; Phinn, S. A new source for high spatial resolution night time images—The EROS-B commercial satellite. Remote Sens. Environ. 2014, 149, 1–12. [Google Scholar] [CrossRef]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| City | Y | M | D | Tile | City | Y | M | D | Tile |
|---|---|---|---|---|---|---|---|---|---|
| London | 2016 | 06 | 06 | T30UXC-UYC | Delhi | 2016 | 06 | 04 | T43RFM-RGM |
| London | 2016 | 09 | 11 | T30UXC-UYC | Delhi | 2016 | 10 | 22 | T43RFM-RGM |
| London | 2017 | 01 | 02 | T30UXC-UYC | Delhi | 2016 | 12 | 21 | T43RFM-RGM |
| London | 2017 | 04 | 09 | T30UXC-UYC | Seoul | 2016 | 04 | 08 | T52SBG-SCG |
| Paris | 2016 | 12 | 27 | T31UDQ | Seoul | 2017 | 01 | 03 | T52SBG-SCG |
| Paris | 2017 | 01 | 26 | T31UDQ | Seoul | 2017 | 05 | 03 | T52SBG-SCG |
| Paris | 2017 | 05 | 26 | T31UDQ | Seoul | 2017 | 09 | 20 | T52SBG-SCG |
| Paris | 2017 | 11 | 22 | T31UDQ | Shanghai | 2017 | 02 | 28 | T51RUQ |
| Paris | 2018 | 02 | 25 | T31UDQ | Shanghai | 2017 | 04 | 29 | T51RUQ |
| Rome | 2015 | 08 | 30 | T32TQM | Shanghai | 2017 | 04 | 29 | T51RUQ |
| Rome | 2015 | 12 | 18 | T33TTG | Shanghai | 2017 | 12 | 20 | T51RUQ |
| Rome | 2016 | 08 | 04 | T323TQM | Tokyo | 2017 | 02 | 07 | T54SUE-SVE |
| Rome | 2017 | 01 | 01 | T33TTG | Tokyo | 2017 | 05 | 08 | T54SUE-SVE |
| Rome | 2017 | 04 | 02 | T33TTG | Tokyo | 2017 | 11 | 29 | T54SUE-SVE |
| Istanbul | 2016 | 02 | 08 | T35TPF | New York | 2015 | 09 | 24 | T18TWL |
| Istanbul | 2016 | 04 | 18 | T35TPF | New York | 2016 | 03 | 12 | T18TWL |
| Istanbul | 2017 | 05 | 03 | T35TPF | New York | 2016 | 10 | 18 | T18TWL |
| Istanbul | 2017 | 07 | 12 | T35TPF | Rio de Janeiro | 2017 | 03 | 10 | T23KPQ |
| Istanbul | 2017 | 09 | 10 | T35TPF | Rio de Janeiro | 2017 | 06 | 18 | T23KPQ |
| Cairo | 2015 | 09 | 02 | T36RUU | Rio de Janeiro | 2017 | 09 | 06 | T23KPQ |
| Cairo | 2016 | 03 | 10 | T36RUU | Santiago | 2016 | 03 | 05 | T19HCC-HCD |
| Cairo | 2016 | 04 | 19 | T36RUU | Santiago | 2016 | 08 | 02 | T19HCC-HCD |
| Delhi | 2016 | 02 | 05 | T43RFM-RGM | Santiago | 2016 | 12 | 20 | T19HCC-HCD |
© 2019 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Small, C. Multisensor Characterization of Urban Morphology and Network Structure. Remote Sens. 2019, 11, 2162. https://doi.org/10.3390/rs11182162
Small C. Multisensor Characterization of Urban Morphology and Network Structure. Remote Sensing. 2019; 11(18):2162. https://doi.org/10.3390/rs11182162
Chicago/Turabian StyleSmall, Christopher. 2019. "Multisensor Characterization of Urban Morphology and Network Structure" Remote Sensing 11, no. 18: 2162. https://doi.org/10.3390/rs11182162
APA StyleSmall, C. (2019). Multisensor Characterization of Urban Morphology and Network Structure. Remote Sensing, 11(18), 2162. https://doi.org/10.3390/rs11182162