A High-Resolution Airborne Color-Infrared Camera Water Mask for the NASA ABoVE Campaign

 , , , , , , , ,
, , , , , , , , 
Abstract
:
1. Introduction
2. Materials and Methods
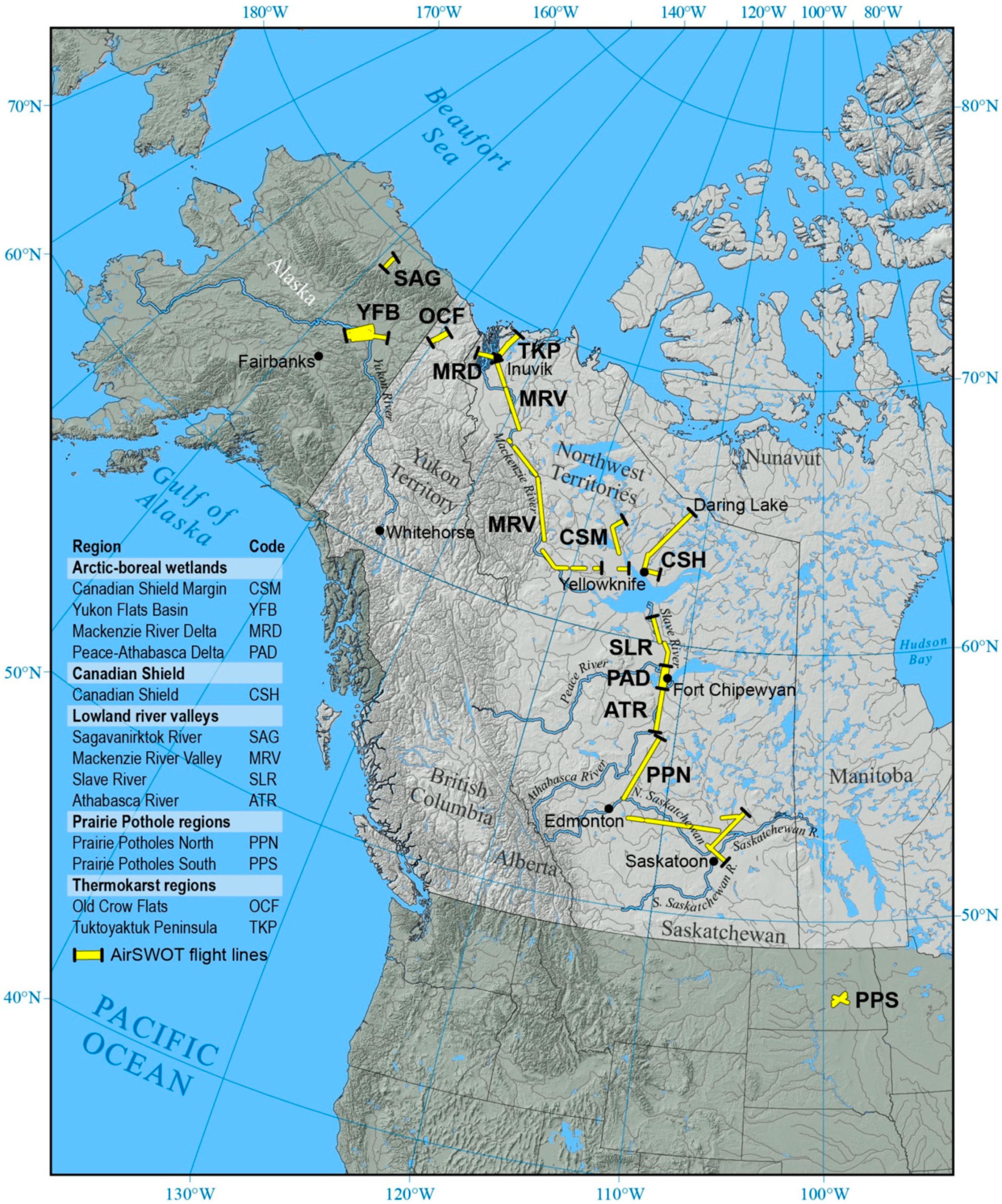
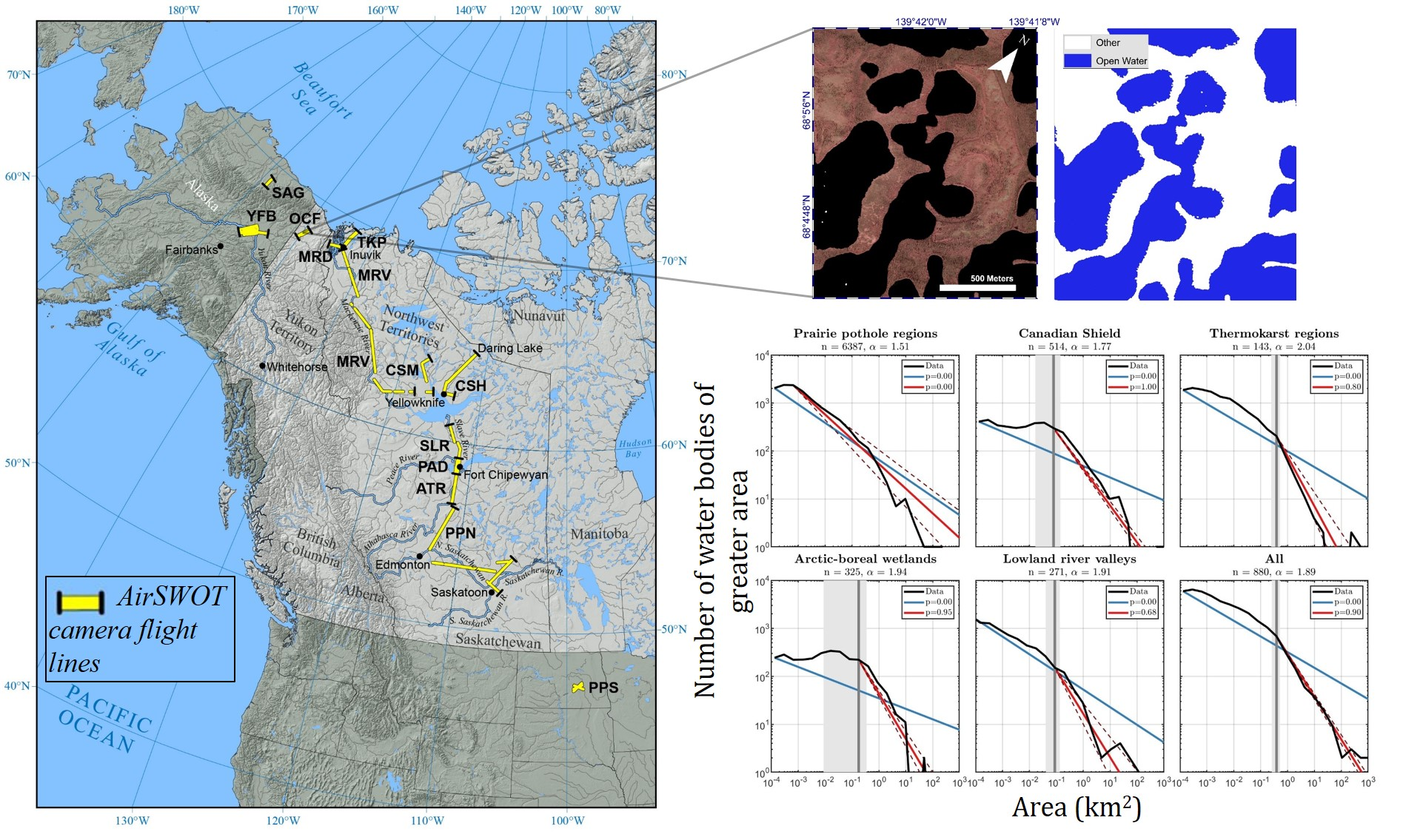
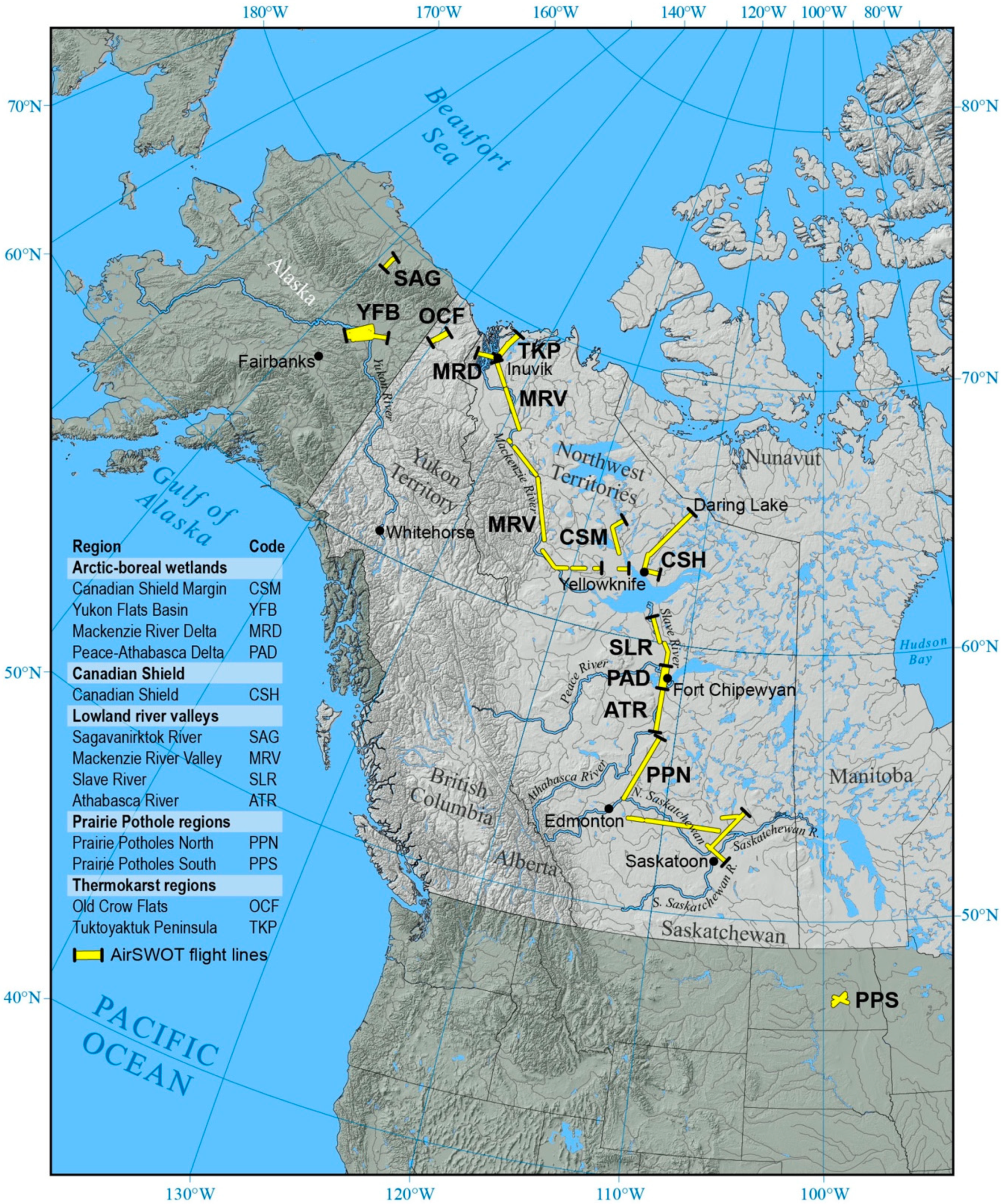
2.1. 2017 ABoVE AirSWOT Study Areas and Flight Lines
2.2. CIR Camera Image Acquisition and Processing
2.2.1. Image Acquisition
2.2.2. Image Quality
2.2.3. Geolocation Correction
2.3. Open Water Classification
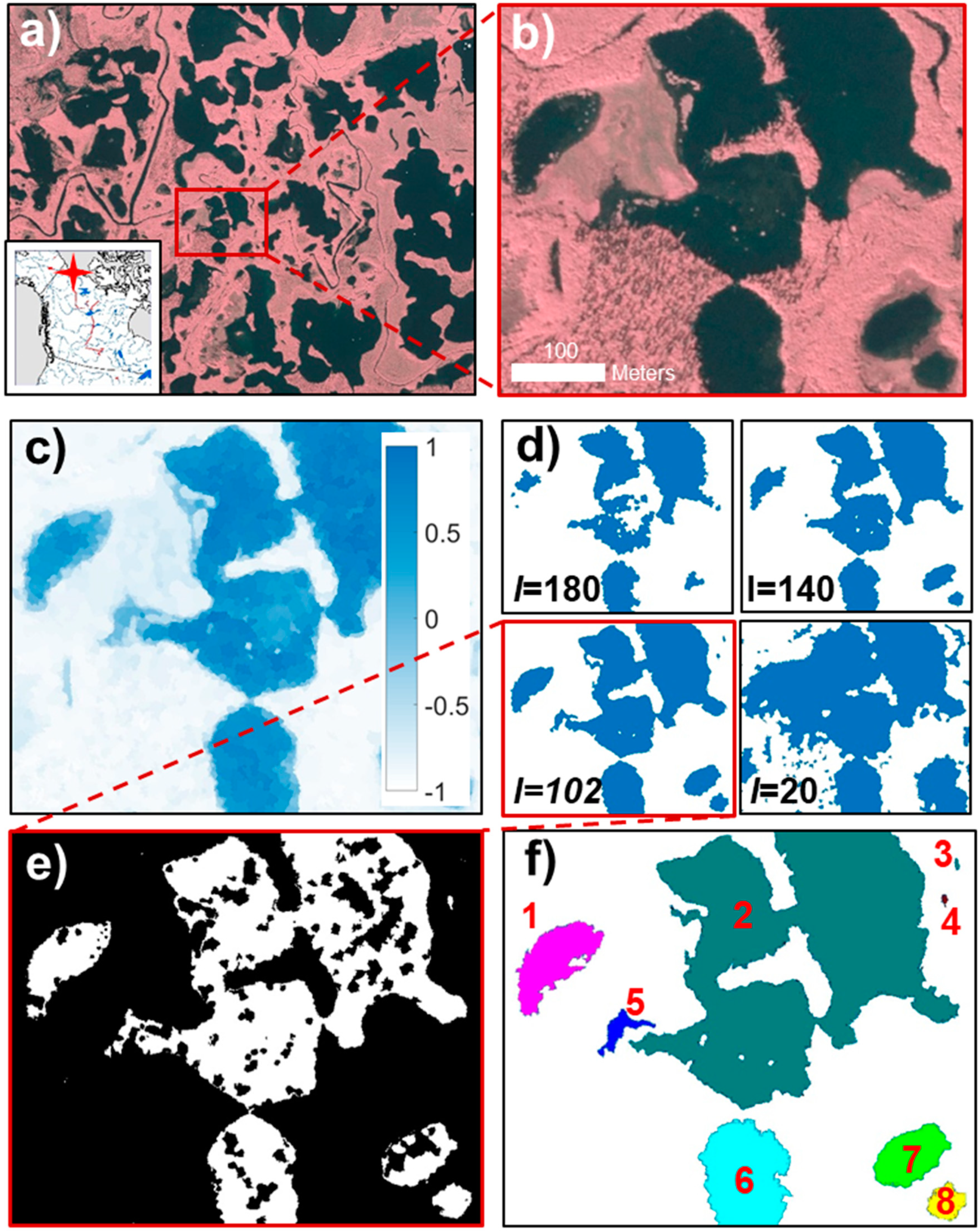
2.3.1. Automated Classification Steps
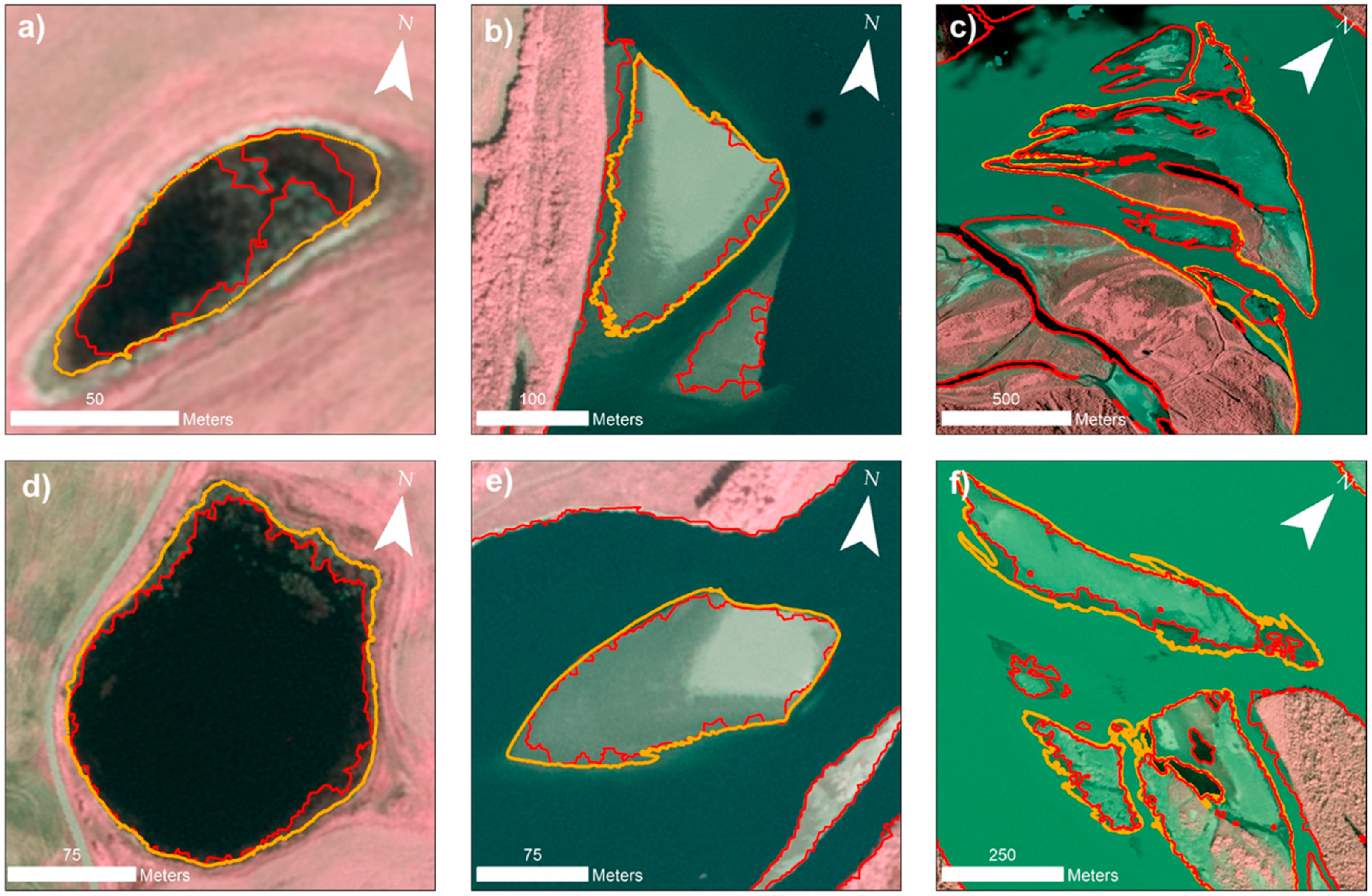
2.3.2. Manual Classification Steps and Quality Assessment
2.4. Validation of Open Water Classification
2.5. Water Body Morphometric Analysis
2.6. Power-Law Scaling of Water Body Area Distributions within Physiographic Subregions
3. Results
3.1. Validation of the Open Water Classification
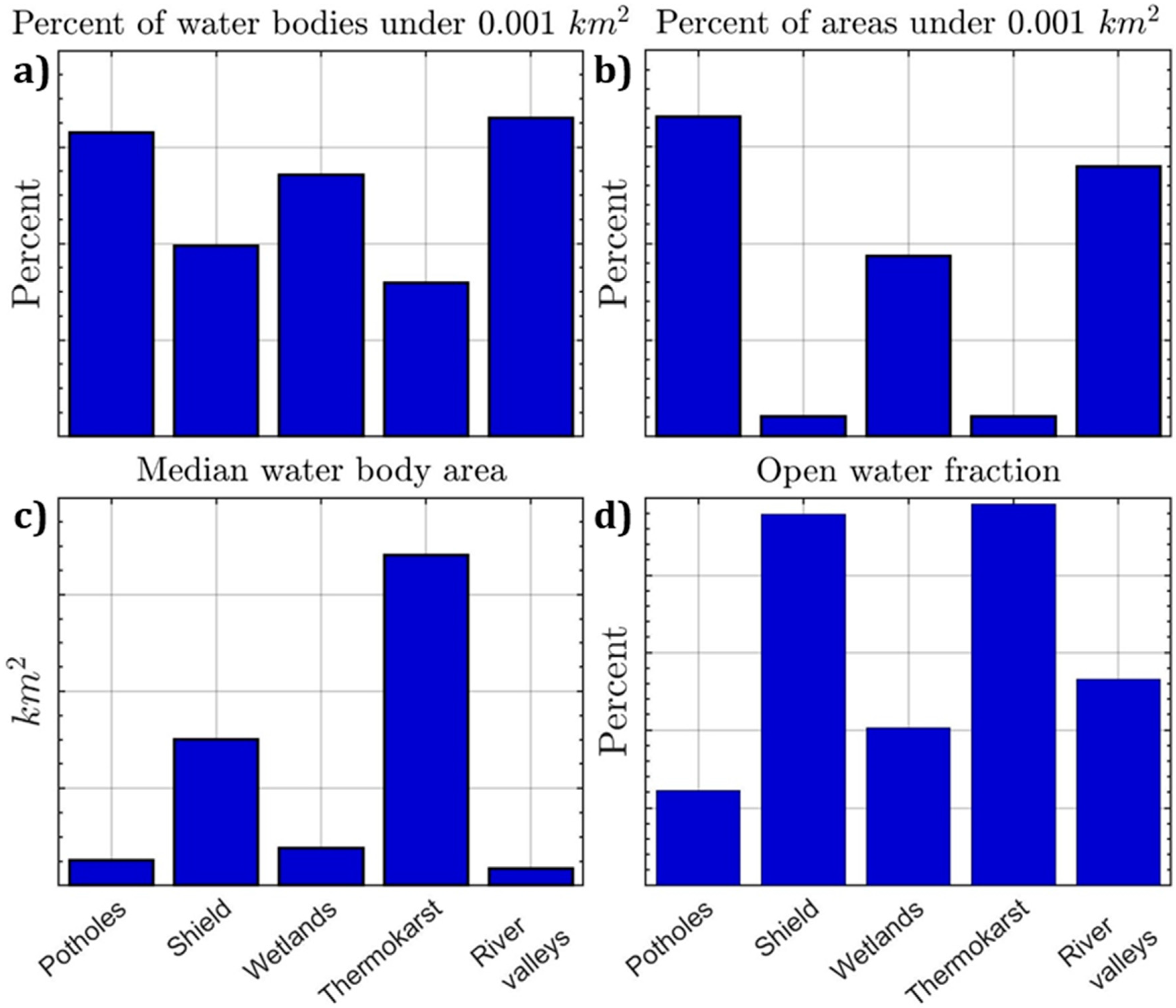
3.2. CIR Camera Water Body Classification Summary Statistics
3.3. Area Distributions of Mapped Water Bodies
4. Discussion
4.1. Utility of CIR Open Water Classifications for the SWOT Satellite Mission
4.2. Utility of CIR Imagery and Open Water Classifications for the NASA Arctic-Boreal Vulnerability Experiment (ABoVE)
4.3. Validated Open Water Classification Performance
4.4. Improving Mapping of Very Small Water Bodies
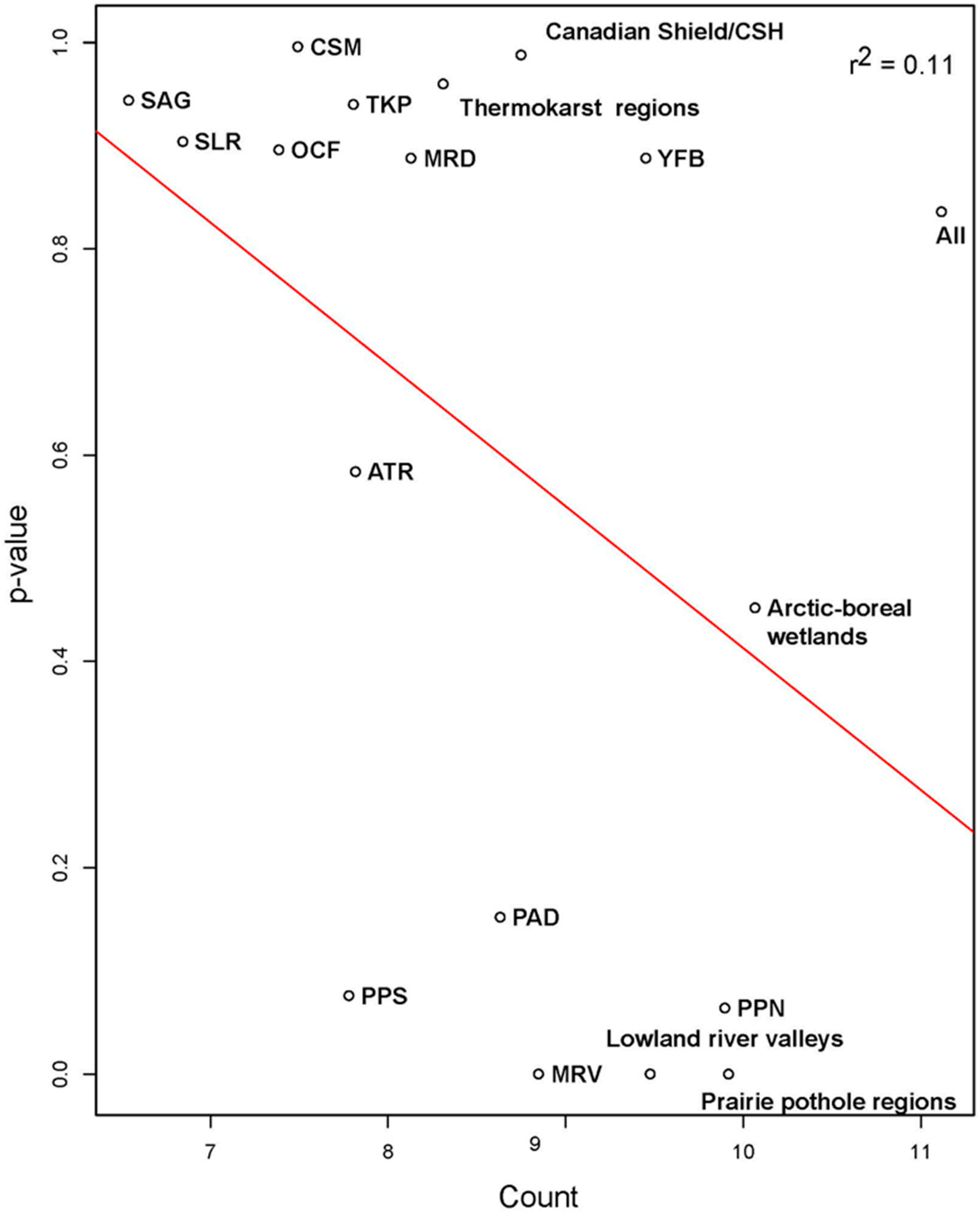
4.5. Testing Power-Law Regimes
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Appendix A


References
- National Academies of Sciences, Engineering, and Medicine. Thriving on Our Changing Planet: A Decadal Strategy for Earth Observation from Space; The National Academies Press: Washington, DC, USA, 2018. [Google Scholar]
- Smith, L.C.; Sheng, Y.; MacDonald, G.M.; Hinzman, L.D. Disappearing Arctic Lakes. Science 2005, 308, 1429. [Google Scholar] [CrossRef] [PubMed]
- Nitze, I.; Grosse, G.; Jones, B.M.; Arp, C.D.; Ulrich, M.; Fedorov, A.; Veremeeva, A. Landsat-based trend analysis of lake dynamics across Northern Permafrost Regions. Remote Sens. 2017, 9, 640. [Google Scholar] [CrossRef]
- Jorgenson, M.; Grosse, G. Remote Sensing of Landscape Change in Permafrost Regions. Permafr. Periglac. Process. 2016, 27, 324–338. [Google Scholar] [CrossRef]
- Smith, L.C.; Sheng, Y.; MacDonald, G.M. A first pan-arctic assessment of the influence of glaciation, permafrost, topography and peatlands on northern hemisphere lake distribution. Permafr. Periglac. Process. 2007, 18, 201–208. [Google Scholar] [CrossRef]
- Lehner, B.; Döll, P. Development and validation of a global database of lakes, reservoirs and wetlands. J. Hydrol. 2004, 296, 1–22. [Google Scholar] [CrossRef]
- Maybeck, M. Global Distribution of Lakes. In Physics and Chemistry of Lakes; Lerman, A., Imboden, D.M., Gat, R.J., Eds.; Springer: Heidelberg, Germany, 1995; pp. 1–36. [Google Scholar]
- Verpoorter, C.; Kutser, T.; Seekell, D.A.; Tranvik, L.J. A global inventory of lakes based on high-resolution satellite imagery. Geophys. Res. Lett. 2014, 41, 6396–6402. [Google Scholar] [CrossRef]
- Yamazaki, D.; Trigg, M.A.; Ikeshima, D. Development of a global ~90 m water body map using multi-temporal Landsat images. Remote Sens. Environ. 2015, 171, 337–351. [Google Scholar] [CrossRef]
- Carroll, M.L.; Townshend, J.R.; DiMiceli, C.M.; Noojipady, P.; Sohlberg, R.A. A new global raster water mask at 250 m resolution. Int. J. Digit. Earth 2009, 2, 291–308. [Google Scholar] [CrossRef]
- Pekel, J.-F.; Cottam, A.; Gorelick, N.; Belward, A.S. High-resolution mapping of global surface water and its long-term changes. Nature 2016, 540, 418–436. [Google Scholar] [CrossRef]
- Cooley, S.W.; Smith, L.C.; Ryan, J.C.; Pitcher, L.H.; Pavelsky, T.M. Arctic-Boreal lake dynamics revealed using CubeSat imagery. Geophys. Res. Lett. 2019, 46, 2111–2120. [Google Scholar] [CrossRef]
- Hanson, P.C.; Carpenter, S.R.; Cardille, J.A.; Coe, M.T.; Winslow, L.A. Small lakes dominate a random sample of regional lake characteristics. Freshw. Biol. 2007, 52, 814–822. [Google Scholar] [CrossRef]
- Muster, S.; Riley, W.J.; Roth, K.; Langer, M.; Cresto Aleina, F.; Koven, C.D.; Lange, S.; Bartsch, A.; Grosse, G.; Wilson, C.J.; et al. Size Distributions of Arctic Waterbodies Reveal Consistent Relations in Their Statistical Moments in Space and Time. Front. Earth Sci. 2019, 7. [Google Scholar] [CrossRef]
- McDonald, C.P.; Rover, J.A.; Stets, E.G.; Striegl, R.G. The regional abundance and size distribution of lakes and reservoirs in the United States and implications for estimates of global lake extent. Limnol. Oceanogr. 2012, 57, 597–606. [Google Scholar] [CrossRef]
- Chumchal, M.M.; Drenner, R.W.; Adams, K.J. Abundance and size distribution of permanent and temporary farm ponds in the southeastern Great Plains. Inland Waters 2016, 6, 258–264. [Google Scholar] [CrossRef] [Green Version]
- Berg, M.D.; Popescu, S.C.; Wilcox, B.P.; Angerer, J.P.; Rhodes, E.C.; McAlister, J.; Fox, W.E. Small farm ponds: Overlooked features with important impacts on watershed sediment transport. Jawra J. Am. Water Resour. Assoc. 2016, 52, 67–76. [Google Scholar] [CrossRef]
- Wik, M.; Varner, R.K.; Anthony, K.W.; MacIntyre, S.; Bastviken, D. Climate-sensitive northern lakes and ponds are critical components of methane release. Nat. Geosci. 2016, 9, 99–105. [Google Scholar] [CrossRef]
- Zhang, B.; Tian, H.; Lu, C.; Chen, G.; Pan, S.; Anderson, C.; Poulter, B. Methane emissions from global wetlands: An assessment of the uncertainty associated with various wetland extent data sets. Atmos. Environ. 2017, 165, 310–321. [Google Scholar] [CrossRef]
- Bridgham, S.D.; Cadillo-Quiroz, H.; Keller, J.K.; Zhuang, Q. Methane emissions from wetlands: Biogeochemical, microbial, and modeling perspectives from local to global scales. Glob. Chang. Biol. 2013, 19, 1325–1346. [Google Scholar] [CrossRef]
- Biggs, J.; von Fumetti, S.; Kelly-Quinn, M. The importance of small waterbodies for biodiversity and ecosystem services: Implications for policy makers. Hydrobiologia 2017, 793, 3–39. [Google Scholar] [CrossRef]
- Downing, J.A. Emerging global role of small lakes and ponds: Little things mean a lot. Limnetica 2008, 29, 9–24. [Google Scholar]
- Downing, J.A.; Prairie, Y.T.; Cole, J.J.; Duarte, C.M.; Tranvik, L.J.; Striegl, R.G.; Mcdowell, W.H.; Kortelainen, P.; Caraco, N.F.; Melack, J.M.; et al. The global abundance and size distribution of lakes, ponds, and impoundments. Limnol. Ocean. 2006, 51, 2388–2397. [Google Scholar] [CrossRef] [Green Version]
- Seekell, D.A.; Pace, M.L. Does the Pareto distribution adequately describe the size-distribution of lakes? Limnol. Oceanogr. 2011, 56, 350–356. [Google Scholar] [CrossRef]
- Raymond, P.A.; Hartmann, J.; Lauerwald, R.; Sobek, S.; McDonald, C.; Hoover, M.; Butman, D.; Striegl, R.; Mayorga, E.; Humborg, C.; et al. Global carbon dioxide emissions from inland waters. Nature 2013, 503, 355–359. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Cael, B.B.; Seekell, D.A. The size-distribution of Earth’s lakes. Sci. Rep. 2016, 6, 29633. [Google Scholar] [CrossRef] [PubMed]
- Allen, G.H.; Pavelsky, T.M. Global extent of rivers and streams. Science 2018, 361, 585–588. [Google Scholar] [CrossRef] [Green Version]
- Downing, J.A.; Cole, J.J.; Duarte, C.M.; Middelburg, J.J.; Melack, J.M.; Prairie, Y.T.; Kortelainen, P.; Striegl, R.G.; Mcdowell, W.H.; Tranvik, L.J. Global abundance and size distribution of streams and rivers. Inland Waters 2012, 2, 229–236. [Google Scholar] [CrossRef]
- Kasischke, E.S.; Hayes, D.J.; Billings, S.; Boelman, N.; Colt, S.; Fisher, J.; Goetz, S.; Griffith, P.; Grosse, G.; Hall, F.; et al. A Concise Experiment Plan for the Arctic-Boreal Vulnerability Experiment; ORNL DAAC: Oak Ridge, TN, USA, 2014. [Google Scholar] [CrossRef]
- Loboda, T.V.; Hoy, E.E.; Carroll, M.L. ABoVE: Study Domain and Standard Reference Grids, version 2; ORNL DAAC: Oak Ridge, TN, USA, 2017. [Google Scholar] [CrossRef]
- Du, J.; Kimball, J.S.; Jones, L.A.; Watts, J.D. ABoVE: Fractional Open Water Cover for Pan-Arctic and ABoVE-Domain Regions, 2002–2015; Oak Ridge National Lab DAAC: Oak Ridge, TN, USA, 2016. [Google Scholar] [CrossRef]
- Muster, S.; Roth, K.; Langer, M.; Lange, S.; Aleina, F.C.; Bartsch, A.; Morgenstern, A.; Grosse, G.; Jones, B.; Sannel, A.B.K.; et al. PeRL: A circum-Arctic Permafrost Region Pond and Lake database. Earth Syst. Sci. Data 2017, 95194, 317–348. [Google Scholar] [CrossRef]
- Miller, C.; Griffith, C.P.; Goetz, S.J.; Hoy, E.E.; Pinto, N.; McCubbin, I.B.; Thorpe, A.K.; Hofton, M.; Hodkinson, D.; Hansen, C.; et al. An overview of ABoVE airborne campaign data acquisitions and science opportunities. Environ. Res. Lett. 2019, 14. [Google Scholar] [CrossRef]
- Vimal, S.; Lettenmaier, D.P.; Smith, L.C. Monthly Hydrological Fluxes from 1979–2018 for Canada and Alaska; ORNL DAAC: Oak Ridge, TN, USA, 2019. [Google Scholar] [CrossRef]
- EnhancedView Web Hosting Service. Available online: https://evwhs.digitalglobe.com/myDigitalGlobe/login (accessed on 1 May 2018).
- Satellite Information. Available online: https://www.digitalglobe.com/resources/satellite-information (accessed on 14 September 2018).
- Kyzivat, E.D.; Smith, L.C.; Pitcher, L.H.; Arvesen, J.; Pavelsky, T.M.; Cooley, S.W.; Topp, S. ABoVE: AirSWOT Color-Infrared Imagery Over Alaska and Canada, 2017; ORNL DAAC: Oak Ridge, TN, USA, 2018. [Google Scholar] [CrossRef]
- Messager, M.L.; Lehner, B.; Grill, G.; Nedeva, I.; Schmitt, O. Estimating the volume and age of water stored in global lakes using a geo-statistical approach. Nat. Commun. 2016, 7, 1–11. [Google Scholar] [CrossRef]
- McFeeters, S.K. The use of the Normalized Difference Water Index (NDWI) in the delineation of open water features. Int. J. Remote Sens. 1996, 17, 1425–1432. [Google Scholar] [CrossRef]
- Zhu, Z.; Woodcock, C.E. Object-based cloud and cloud shadow detection in Landsat imagery. Remote Sens. Environ. 2012, 118, 83–94. [Google Scholar] [CrossRef]
- Cheng, G.; Han, J. A survey on object detection in optical remote sensing images. ISPRS J. Photogramm. Remote Sens. 2016, 117, 11–28. [Google Scholar] [CrossRef] [Green Version]
- Torres-Sánchez, J.; López-Granados, F.; Peña, J.M. An automatic object-based method for optimal thresholding in UAV images: Application for vegetation detection in herbaceous crops. Comput. Electron. Agric. 2015, 114, 43–52. [Google Scholar] [CrossRef]
- Martha, T.R.; Vamsee, A.M.; Tripathi, V.; Kumar, K.V. Detection of coastal landforms in a deltaic area using a multi-scale object-based classification method. Curr. Sci. 2018, 114, 1338–1346. [Google Scholar] [CrossRef]
- Korzeniowska, K.; Korup, O. Object-based detection of lakes prone to seasonal ice cover on the Tibetan Plateau. Remote Sens. 2017, 9, 339. [Google Scholar] [CrossRef]
- Achanta, R.; Shaji, A.; Smith, K.; Lucchi, A.; Fua, P.; Süsstrunk, S. SLIC superpixels compared to state-of-the-art superpixel methods. IEEE Trans. Pattern Anal. Mach. Intell. 2012, 34, 2274–2281. [Google Scholar] [CrossRef] [PubMed]
- Csillik, O. Ovidiu Fast Segmentation and Classification of Very High Resolution Remote Sensing Data Using SLIC Superpixels. Remote Sens. 2017, 9, 243. [Google Scholar] [CrossRef]
- O’Gorman, L. Binarization and Multithresholding of Document Images Using Connectivity. Cvgip Graph. Model. Image Process. 1994, 56, 494–506. [Google Scholar] [CrossRef]
- Rosin, P.L.; Hervás, J. Remote sensing image thresholding methods for determining landslide activity. Int. J. Remote Sens. 2005, 26, 1075–1092. [Google Scholar] [CrossRef] [Green Version]
- Jiang, X.; Mojon, D. Adaptive local thresholding by verification-based multithreshold probing with application to vessel detection in retinal images. IEEE Trans. Pattern Anal. Mach. Intell. 2003, 25, 131–137. [Google Scholar] [CrossRef]
- Soh, L.-K.; Tsatsoulis, C. Unsupervised segmentation of ERS and Radarsat sea ice images using multiresolution peak detection and aggregated population equalization. Int. J. Remote Sens. 1999, 20, 3087–3109. [Google Scholar] [CrossRef]
- Li, J.; Sheng, Y.; Luo, J. Automatic Extraction of Himalayan glacial lakes with remote sensing. J. Remote Sens. 2011, 15, 29–43. [Google Scholar]
- Li, J.; Sheng, Y. An automated scheme for glacial lake dynamics mapping using Landsat imagery and digital elevation models: A case study in the Himalayas. Int. J. Remote Sens. 2012, 33, 5194–5213. [Google Scholar] [CrossRef]
- Pitcher, L.H.; Pavelsky, T.M.; Smith, L.C.; Moller, D.K.; Altenau, E.H.; Allen, G.H.; Lion, C.; Butman, D.; Cooley, S.W.; Fayne, J.V.; et al. AirSWOT InSAR Mapping of Surface Water Elevations and Hydraulic Gradients Across the Yukon Flats Basin, Alaska. Water Resour. Res. 2019, 55, 937–953. [Google Scholar] [CrossRef]
- Harralick, R. Statistical and structural approach to texture. Proc. IEEE 1979, 67, 786–804. [Google Scholar] [CrossRef]
- Campbell, J.B.; Wynne, R.H. Introduction to Remote Sensing, 2nd ed.; The Guilford Press: New York, NY, USA, 2011. [Google Scholar]
- Clauset, A.; Rohilla Shalizi, C.; J Newman, M.E. Power-Law Distributions in Empirical Data. Siam Rev. 2009, 51, 661–703. [Google Scholar] [CrossRef] [Green Version]
- Virkar, Y.; Clauset, A. Power-law distributions in binned empirical data. Ann. Appl. Stat. 2014, 8, 89–119. [Google Scholar] [CrossRef] [Green Version]
- Horvat, C.; Roach, L.; Tilling, R.; Bitz, C.; Fox-Kemper, B.; Guider, C.; Hill, K.; Ridout, A.; Shepherd, A. Estimating the Sea Ice Floe Size Distribution Using Satellite Altimetry: Theory, Climatology, and Model Comparison. Cryosph. Discuss. 2019. [Google Scholar] [CrossRef]
- Efron, B.; Tibshirani, R.J. An Introduction to the Bootstrap; Chapman and Hall: New York, NY, USA, 1993. [Google Scholar]
- Otsu, N. A Tlreshold Selection Method from Gray-Level Histograms. IEEE Trans. Syst. Man Cybern. 1979, SMC-9, 62–66. [Google Scholar] [CrossRef]
- Alsdorf, D.E.; Rodríguez, E.; Lettenmaier, D.P. Measuring Surface Water from Space. Rev. Geophys. 2007, 45. [Google Scholar] [CrossRef]
- Jones, J.W. Improved automated detection of subpixel-scale inundation-revised Dynamic Surface Water Extent (DSWE) partial surface water tests. Remote Sens. 2019, 11, 374. [Google Scholar] [CrossRef]
- Cael, B.B.; Heathcote, A.J.; Seekell, D.A. The volume and mean depth of Earth’s lakes. Geophys. Res. Lett. 2017, 44, 209–218. [Google Scholar] [CrossRef]
- Biancamaria, S.; Dennis Lettenmaier, B.P.; Tamlin Pavelsky, B.M. The SWOT Mission and Its Capabilities for Land Hydrology. Surv. Geophys. 2016, 37, 307–337. [Google Scholar] [CrossRef]
- Durand, M.; Fu, L.L.; Lettenmaier, D.P.; Alsdorf, D.E.; Rodriguez, E.; Esteban-Fernandez, D. The surface water and ocean topography mission: Observing terrestrial surface water and oceanic submesoscale eddies. Proc. IEEE 2010. [Google Scholar] [CrossRef]
- Rodriguez, E. Surface Water and Ocean Topography Mission (SWOT) Project: Science Requirements Document; California Institute of Technology: Pasadena, CA, USA, 2016. [Google Scholar]
- Altenau, E.H.; Pavelsky, T.M.; Moller, D.; Lion, C.; Pitcher, L.H.; Allen, G.H.; Bates, P.D.; Calmant, S.; Durand, M.; Smith, L.C. AirSWOT measurements of river water surface elevation and slope: Tanana River, AK. Geophys. Res. Lett. 2017, 44, 181–189. [Google Scholar] [CrossRef] [Green Version]
- Tuozzolo, S.; Lind, G.; Overstreet, B.; Mangano, J.; Fonstad, M.; Hagemann, M.; Frasson, R.P.M.; Larnier, K.; Garambois, P.-A.; Monnier, J.; et al. Estimating River Discharge with Swath Altimetry: A Proof of Concept Using AirSWOT Observations. Geophys. Res. Lett. 2019. [Google Scholar] [CrossRef]
- Altenau, E.H.; Pavelsky, T.M.; Moller, D.; Pitcher, L.H.; Bates, P.D.; Durand, M.T.; Smith, L.C. Temporal variations in river water surface elevation and slope captured by AirSWOT. Remote Sens. Environ. 2019, 224, 304–316. [Google Scholar] [CrossRef] [Green Version]
- Feyisa, G.L.; Meilby, H.; Fensholt, R.; Proud, S.R. Automated Water Extraction Index: A new technique for surface water mapping using Landsat imagery. Remote Sens. Environ. 2014, 140, 23–35. [Google Scholar] [CrossRef]
- Xu, H. Modification of normalised difference water index (NDWI) to enhance open water features in remotely sensed imagery. Int. J. Remote Sens. 2006, 27, 3025–3033. [Google Scholar] [CrossRef]
- Fayne, J.V.; Smith, L.C.; Pitcher, L.H.; Pavelsky, T.M. ABoVE: AirSWOT Ka-Band Radar over Surface Waters of Alaska and Canada, 2017; ORNL DAAC: Oak Ridge, TN, USA, 2019. [Google Scholar] [CrossRef]
- Kyzivat, E.D.; Smith, L.C.; Pitcher, L.H.; Fayne, J.V.; Cooley, S.W.; Topp, S.N.; Langhorst, T.; Harlan, M.E.; Cooper, M.G.; Gleason, C.J.; et al. ABoVE: AirSWOT Water Masks from Color-Infrared Imagery over Alaska and Canada, 2017; ORNL DAAC: Oak Ridge, TN, USA, 2019. [Google Scholar] [CrossRef]
- Rey, D.M.; Walvoord, M.; Minsley, B.; Rover, J.; Singha, K. Investigating Lake-Area Dynamics across a Permafrost-Thaw Spectrum Using Airborne Electromagnetic Surveys and Remote Sensing Time-series Data in Yukon Flats. Environ. Res. Lett. 2019, 14. [Google Scholar] [CrossRef]
- Schuur, E.A.G.; Mack, M.C. Ecological Response to Permafrost Thaw and Consequences for Local and Global Ecosystem Services. Annu. Rev. Ecol. Evol. Syst. 2018, 49, 279–301. [Google Scholar] [CrossRef]
- Bogard, M.J.; Kuhn, C.D.; Johnston, S.E.; Striegl, R.G.; Holtgrieve, G.W.; Dornblaser, M.M.; Spencer, R.G.M.; Wickland, K.P.; Butman, D.E. Negligible cycling of terrestrial carbon in many lakes of the arid circumpolar landscape. Nat. Geosci. 2019, 12, 180–185. [Google Scholar] [CrossRef]
- Schuur, E.A.G.; McGuire, A.D.; Schädel, C.; Grosse, G.; Harden, J.W.; Hayes, D.J.; Hugelius, G.; Koven, C.D.; Kuhry, P.; Lawrence, D.M.; et al. Climate change and the permafrost carbon feedback. Nature 2015, 520, 171–179. [Google Scholar] [CrossRef] [PubMed]
- Freeman, A.; Durden, S.L. A three-component scattering model for polarimetric SAR data. IEEE Trans. Geosci. Remote Sens. 1998. [Google Scholar] [CrossRef]
- Blair, J.B.; Hofton, M. ABoVE LVIS L2 Geolocated Surface Elevation Product, Version 1; NASA National Snow and Ice Data Center Distributed Active Archive Center: Boulder, Colorado USA, 2018. [Google Scholar] [CrossRef]
- Miller, C.E.; Green, R.O.; Thompson, D.R.; Thorpe, A.K.; Eastwood, M.; Mccubbin, I.B.; Olson-duvall, W.; Bernas, M.; Sarture, C.M.; Nolte, S.; et al. ABoVE: Hyperspectral Imagery from AVIRIS-NG for Alaskan and Canadian Arctic, 2017; ORNL DAAC: Oak Ridge, TN, USA, 2018. [Google Scholar] [CrossRef]
- Yang, K.; Li, M.; Liu, Y.; Cheng, L.; Huang, Q.; Chen, Y.; Mishra, D.R.; Mishra, S.; Thenkabail, P.S. River Detection in Remotely Sensed Imagery Using Gabor Filtering and Path Opening. Remote Sens. 2015, 7, 8779–8802. [Google Scholar] [CrossRef] [Green Version]
- Holgerson, M.A.; Raymond, P.A. Large contribution to inland water CO2 and CH4 emissions from very small ponds. Nat. Geosci. 2016, 9, 222–226. [Google Scholar] [CrossRef]
- Bastviken, D.; Cole, J.; Pace, M.; Tranvik, L. Methane emissions from lakes: Dependence of lake characteristics, two regional assessments, and a global estimate. Glob. Biogeochem. Cycles 2004, 18, 1–12. [Google Scholar] [CrossRef]
- Bohn, T.J.; Melton, J.R.; Ito, A.; Kleinen, T.; Spahni, R.; Stocker, B.D.; Zhang, B.; Zhu, X.; Gallego-Sala, A.; Mcdonald, K.C.; et al. WETCHIMP-WSL: Intercomparison of wetland methane emissions models over West Siberia. Biogeosciences 2015, 12, 20. [Google Scholar] [CrossRef]
- Thornton, B.F.; Wik, M.; Crill, P.M. Double-counting challenges the accuracy of high-latitude methane inventories. Geophys. Res. Lett. 2016, 43, 12569–12577. [Google Scholar] [CrossRef]
- Davidson, S.; Santos, M.; Sloan, V.; Reuss-Schmidt, K.; Phoenix, G.; Oechel, W.; Zona, D.; Davidson, S.J.; Santos, M.J.; Sloan, V.L.; et al. Upscaling CH4 Fluxes Using High-Resolution Imagery in Arctic Tundra Ecosystems. Remote Sens. 2017, 9, 1227. [Google Scholar] [CrossRef]
- Fayne, J.V.; Smith, L.C.; Pitcher, L.H.; Kyzivat, E.D.; Cooper, M.G.; Cooley, S.W.; Denbina, M.; Chen, A.; Pavelsky, T.M. Airborne Observations of Arctic-Boreal Water Surface Elevation from AirSWOT Ka-band InSAR and LVIS LiDAR. Environ. Res. Lett. in preparation.
- Wang, J.; Sheng, Y.; Hinkel, K.M.; Lyons, E. Alaskan Lake Database Mapped from Landsat Images. Available online: https://arcticdata.io/catalog/view/doi:10.5065/D6MC8X5R (accessed on 5 January 2019).









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Region | Site Code | Category | Area (km2) | Northbound Flight(s) | Southbound Flight(s) |
|---|---|---|---|---|---|
| Sagavanirktok River | SAG | Lowland river valley | 309 | July 19 | - |
| Yukon Flats Basin | YFB | Wetland | 4601 | July 17, 20, 21 | August 6, 7 |
| Old Crow Flats | OCF | Thermokarst | 653 | - | August 7 |
| Mackenzie River Delta | MRD | Wetland | 409 | July 16 | August 7 |
| Tuktoyaktuk Peninsula | TKP | Thermokarst | 1095 | July 16 | August 9 |
| Mackenzie River Valley | MRV | Lowland river valley | 3748 | - | August 9 |
| Canadian Shield Margin | CSM | Wetland | 814 | - | August 9, 12 |
| Canadian Shield | CSH | Shield | 2183 | July 15 | August 12, 15 |
| Slave River | SLR | Lowland river valley | 878 | - | August 13 |
| Peace-Athabasca Delta | PAD | Wetland | 1509 | - | August 13 |
| Athabasca River | ATR | Lowland river valley | 1011 | July 9 | August 13 |
| Prairie Potholes North | PPN | Pothole, Lowland river valley 1 | 5289 | July 9 | August 16,17 |
| Prairie Potholes South | PPS | Pothole | 880 | - | August 17 |
| All regions | - | - | 23,380 | - | - |
| Reference | |||||
|---|---|---|---|---|---|
| Other | Open Water | Row Total | User’s Accuracy | ||
| Map | Other | 27,245,985 | 184,418 | 27,430,403 | 99.3% |
| Open Water | 431,610 | 2,904,932 | 3,336,542 | 87.1% | |
| Column Total | 27,677,595 | 3,089,350 | 30,766,945 | ||
| Producer’s Accuracy | 98.4% | 94.0% | 98.0% | ||
| Error Metric. | Percentage |
|---|---|
| User’s Accuracy | 87.1 |
| Producer’s Accuracy | 94.0 |
| Overall Accuracy | 98.0 |
| Kappa Coefficient | 89.3 |
| Area percent difference | −7.7% |
| Region | Area (km2) | N | Amed (m2) | Fwater (%) | Flakes (%) | F0.001 (%) | A0.001 (%) | A0 (m2) | σA0 (m2) | α | σα | p |
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| SAG | 309 | 532 | 300 | 2.57 | 0.68 | 74.62 | 3.03 | 502 | 193 | 1.61 | 0.05 | 0.72 |
| YFB | 4601 | 8508 | 892 | 7.13 | 3.45 | 51.97 | 0.77 | 273,396 | 96,159 | 2.51 | 0.28 | 0.88 |
| OCF | 653 | 1208 | 4522 | 20.94 | 18.41 | 36.01 | 0.07 | 216,520 | 102,553 | 1.94 | 0.12 | 0.85 |
| MRD | 409 | 2305 | 1746 | 37.60 | 22.47 | 43.47 | 0.21 | 250,581 | 145,859 | 2.18 | 0.32 | 0.69 |
| MRV | 3748 | 4670 | 615 | 17.34 | 4.06 | 56.27 | 0.16 | 83,734 | 68,758 | 1.89 | 0.15 | 0.23 |
| CSM | 814 | 1271 | 644 | 11.81 | 10.87 | 57.28 | 0.03 | 6502 | 6093 | 1.59 | 0.07 | 0.99 |
| CSH | 2183 | 4136 | 3012 | 23.95 | 23.30 | 39.58 | 0.02 | 117,629 | 62,699 | 1.77 | 0.04 | 1.00 |
| SLR | 878 | 720 | 374 | 12.74 | 0.36 | 68.47 | 3.08 | 1942 | 1456 | 1.83 | 0.12 | 0.86 |
| PAD | 1509 | 2293 | 284 | 10.93 | 6.77 | 71.52 | 0.22 | 1115 | 1582 | 1.62 | 0.05 | 0.42 |
| ATR | 1011 | 1193 | 226 | 5.30 | 1.80 | 77.20 | 0.61 | 351 | 1214 | 1.60 | 0.08 | 0.14 |
| PPN | 5289 | 13,013 | 415 | 5.21 | 4.33 | 67.69 | 0.35 | - | - | - | - | 0.00 |
| PPS | 880 | 1770 | 1427 | 10.29 | 8.99 | 45.03 | 0.33 | 544,824 | 78,690 | 2.41 | 0.18 | 0.97 |
| TKP | 1095 | 1943 | 7976 | 26.79 | 22.78 | 29.28 | 0.01 | 254,009 | 181,073 | 1.95 | 0.14 | 0.93 |
| Pothole | 5822 | 13,758 | 520 | 6.09 | 5.26 | 63.00 | 0.33 | - | - | - | - | 0.00 |
| Shield | 2183 | 4136 | 3012 | 23.95 | 23.30 | 39.58 | 0.02 | 117,629 | 61,817 | 1.77 | 0.04 | 1.00 |
| Wetland | 7333 | 14,377 | 770 | 10.13 | 6.01 | 54.20 | 0.19 | 458,480 | 141,329 | 2.04 | 0.20 | 0.80 |
| Thermokarst | 1748 | 3151 | 6820 | 24.61 | 21.15 | 31.86 | 0.02 | 235,093 | 167,851 | 1.94 | 0.09 | 0.95 |
| River valley | 6293 | 8140 | 356 | 13.27 | 2.82 | 66.06 | 0.28 | 94,158 | 47,170 | 1.91 | 0.20 | 0.68 |
| All | 23,380 | 43,562 | 665 | 12.34 | 7.71 | 56.19 | 0.12 | 343,074 | 130,800 | 1.89 | 0.04 | 0.90 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kyzivat, E.D.; Smith, L.C.; Pitcher, L.H.; Fayne, J.V.; Cooley, S.W.; Cooper, M.G.; Topp, S.N.; Langhorst, T.; Harlan, M.E.; Horvat, C.; et al. A High-Resolution Airborne Color-Infrared Camera Water Mask for the NASA ABoVE Campaign. Remote Sens. 2019, 11, 2163. https://doi.org/10.3390/rs11182163
Kyzivat ED, Smith LC, Pitcher LH, Fayne JV, Cooley SW, Cooper MG, Topp SN, Langhorst T, Harlan ME, Horvat C, et al. A High-Resolution Airborne Color-Infrared Camera Water Mask for the NASA ABoVE Campaign. Remote Sensing. 2019; 11(18):2163. https://doi.org/10.3390/rs11182163
Chicago/Turabian StyleKyzivat, Ethan D., Laurence C. Smith, Lincoln H. Pitcher, Jessica V. Fayne, Sarah W. Cooley, Matthew G. Cooper, Simon N. Topp, Theodore Langhorst, Merritt E. Harlan, Christopher Horvat, and et al. 2019. "A High-Resolution Airborne Color-Infrared Camera Water Mask for the NASA ABoVE Campaign" Remote Sensing 11, no. 18: 2163. https://doi.org/10.3390/rs11182163
APA StyleKyzivat, E. D., Smith, L. C., Pitcher, L. H., Fayne, J. V., Cooley, S. W., Cooper, M. G., Topp, S. N., Langhorst, T., Harlan, M. E., Horvat, C., Gleason, C. J., & Pavelsky, T. M. (2019). A High-Resolution Airborne Color-Infrared Camera Water Mask for the NASA ABoVE Campaign. Remote Sensing, 11(18), 2163. https://doi.org/10.3390/rs11182163