Synthetic Aperture Radar (SAR) Compact Polarimetry for Soil Moisture Retrieval


Abstract
1. Introduction
2. Materials and Methods
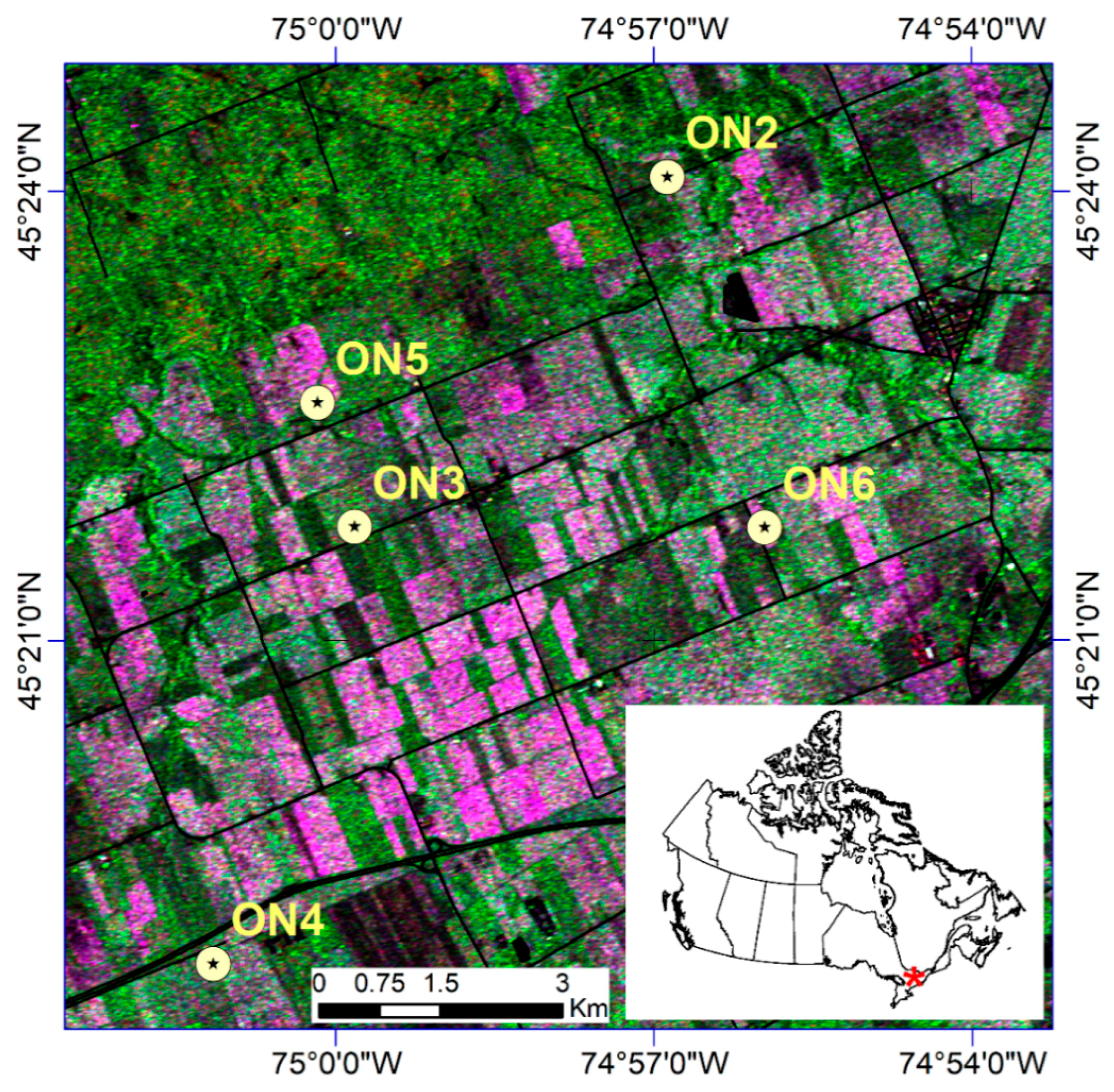
2.1. Study Area
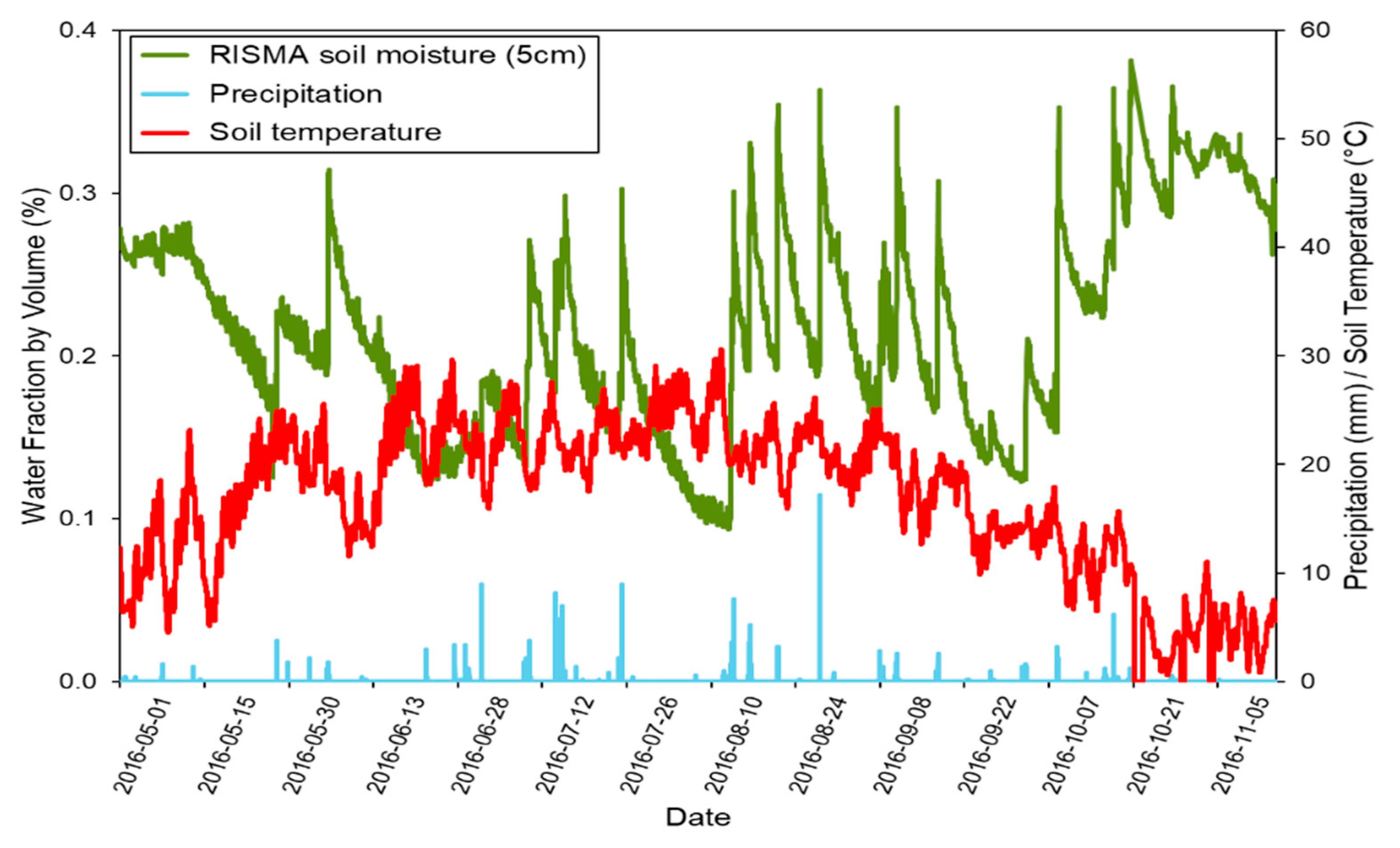
2.2. In-Situ Data
2.3. Remote Sensing Data and Pre-Processing
2.3.1. RADARSAT-2 Data
2.3.2. SMAP Data
2.4. Methods
2.4.1. Transfer Functions Generation
2.4.2. Soil Moisture Retrieval and Validation
2.4.3. Statistical Analysis
3. Results and Discussions
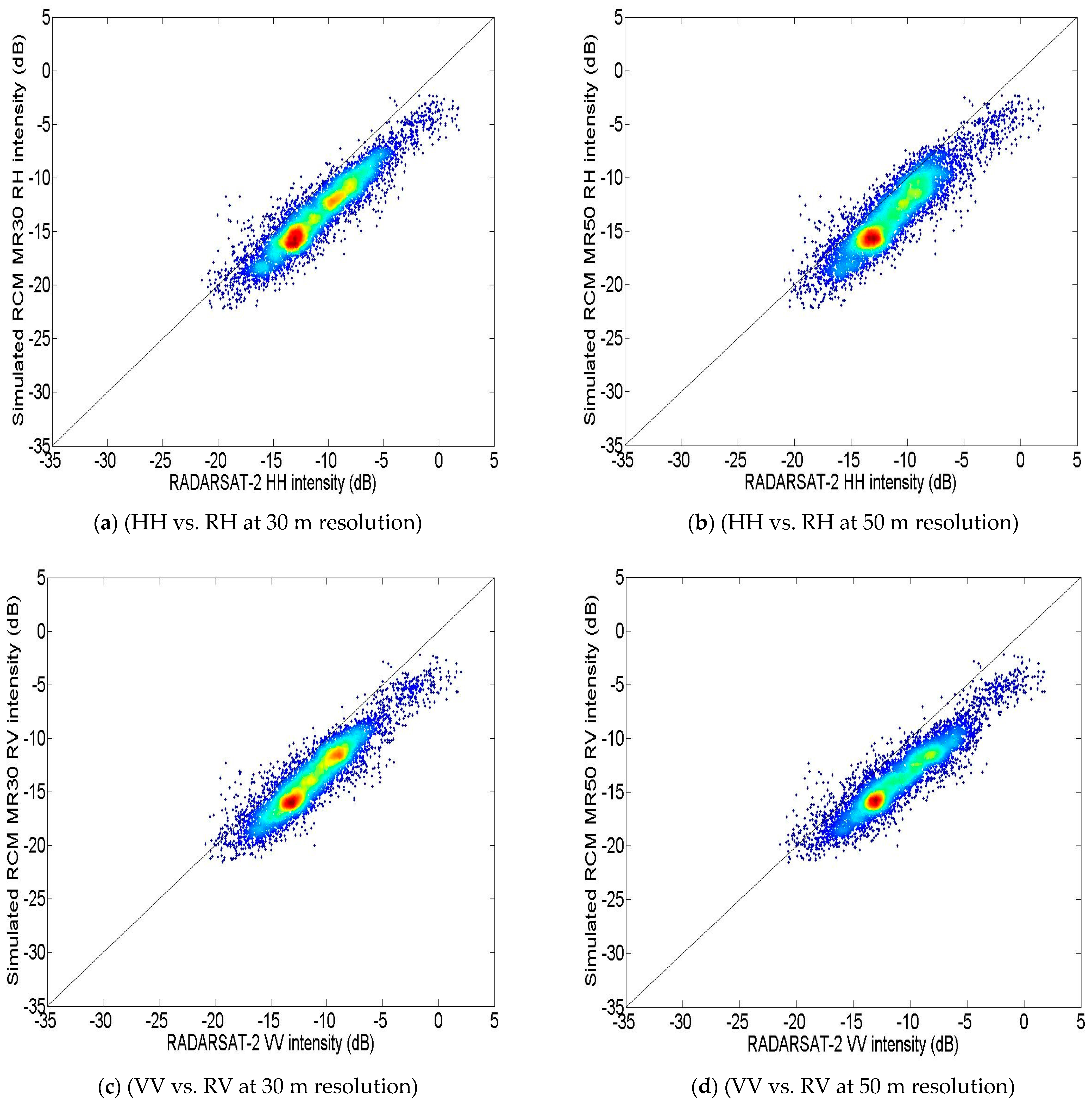
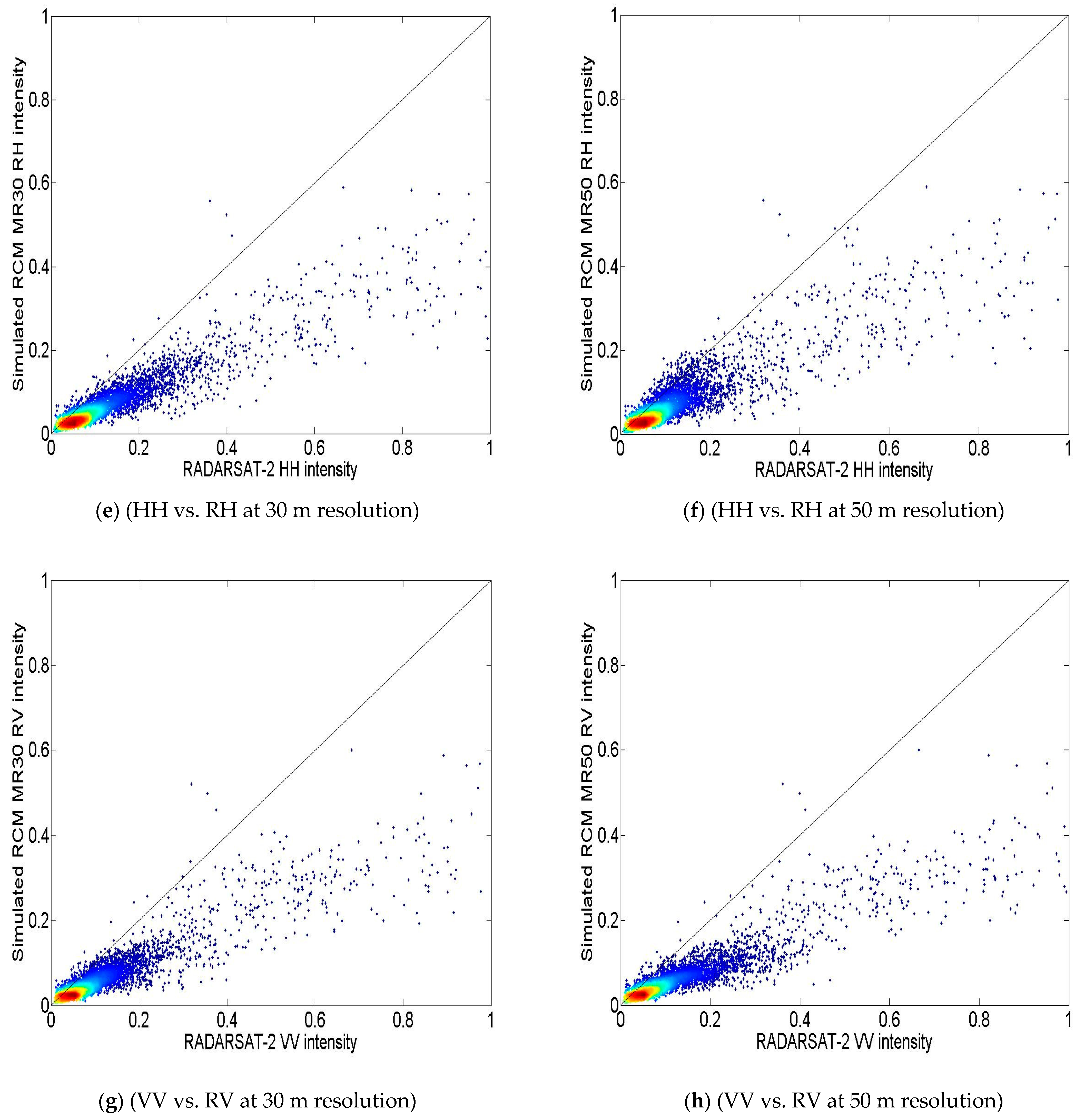
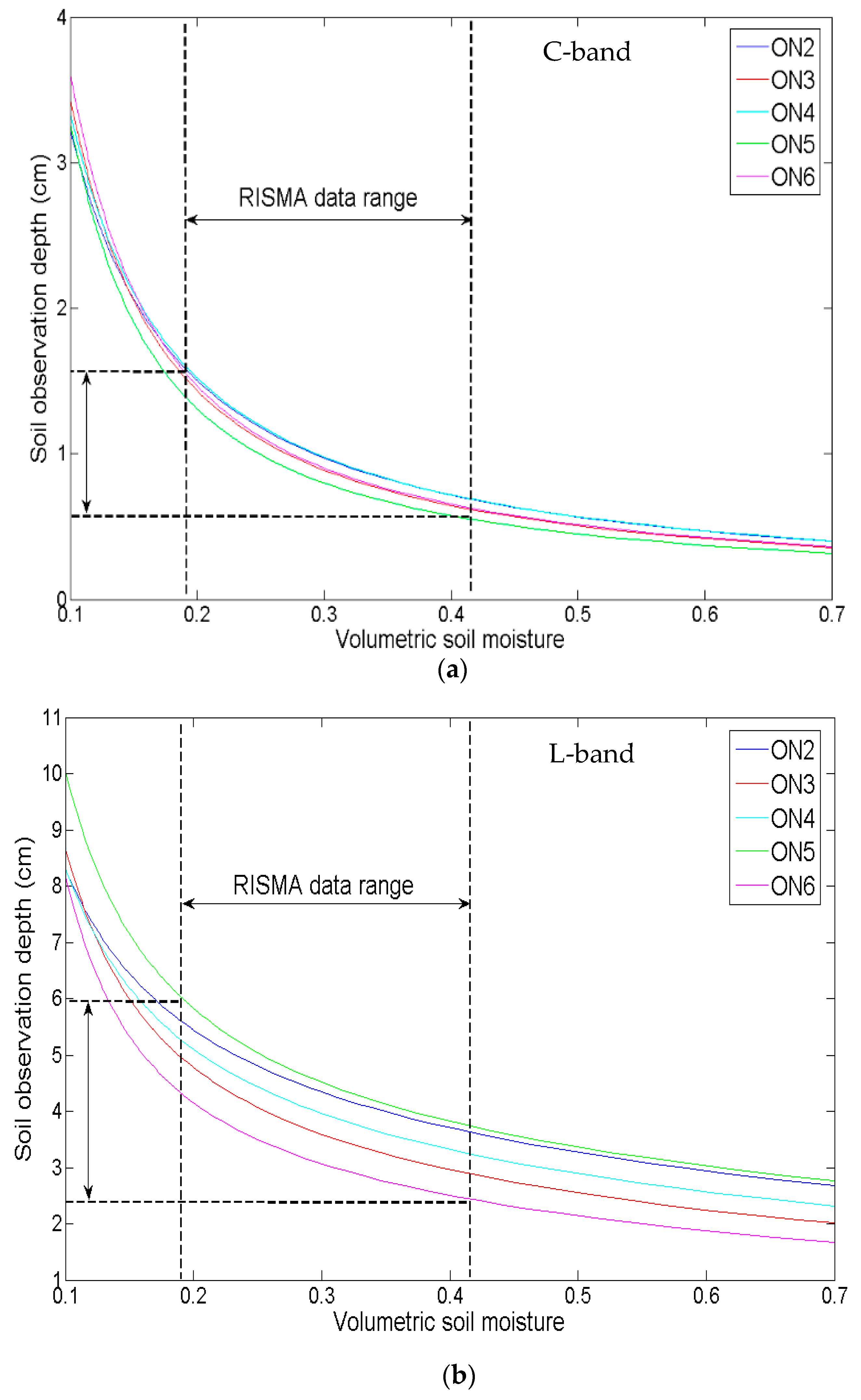
3.1. Forward Modelling
3.2. Inverse Modelling for Soil Moisture Retrieval
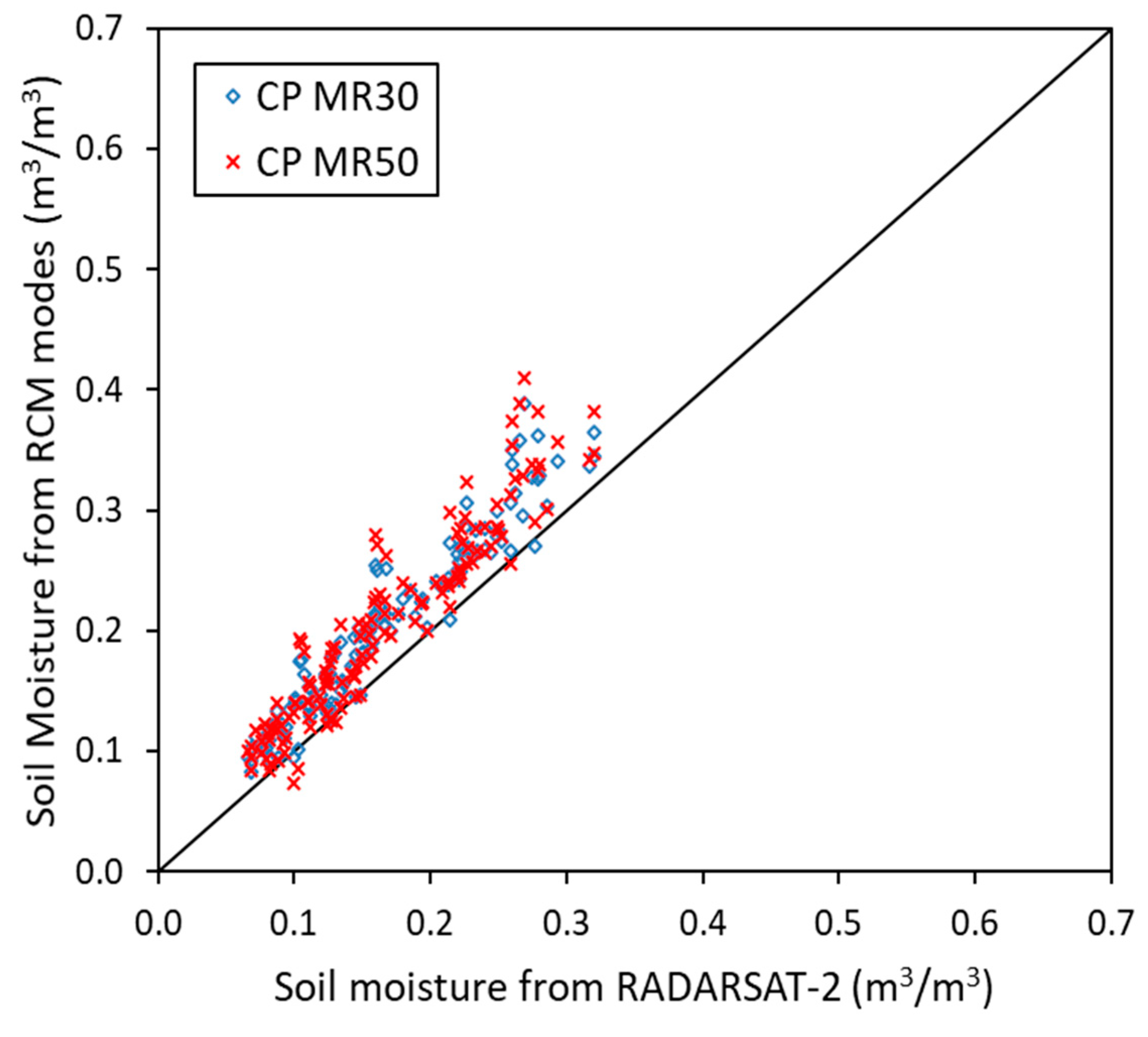
3.2.1. Comparing Retrievals from HH and VV to those from RH and RV
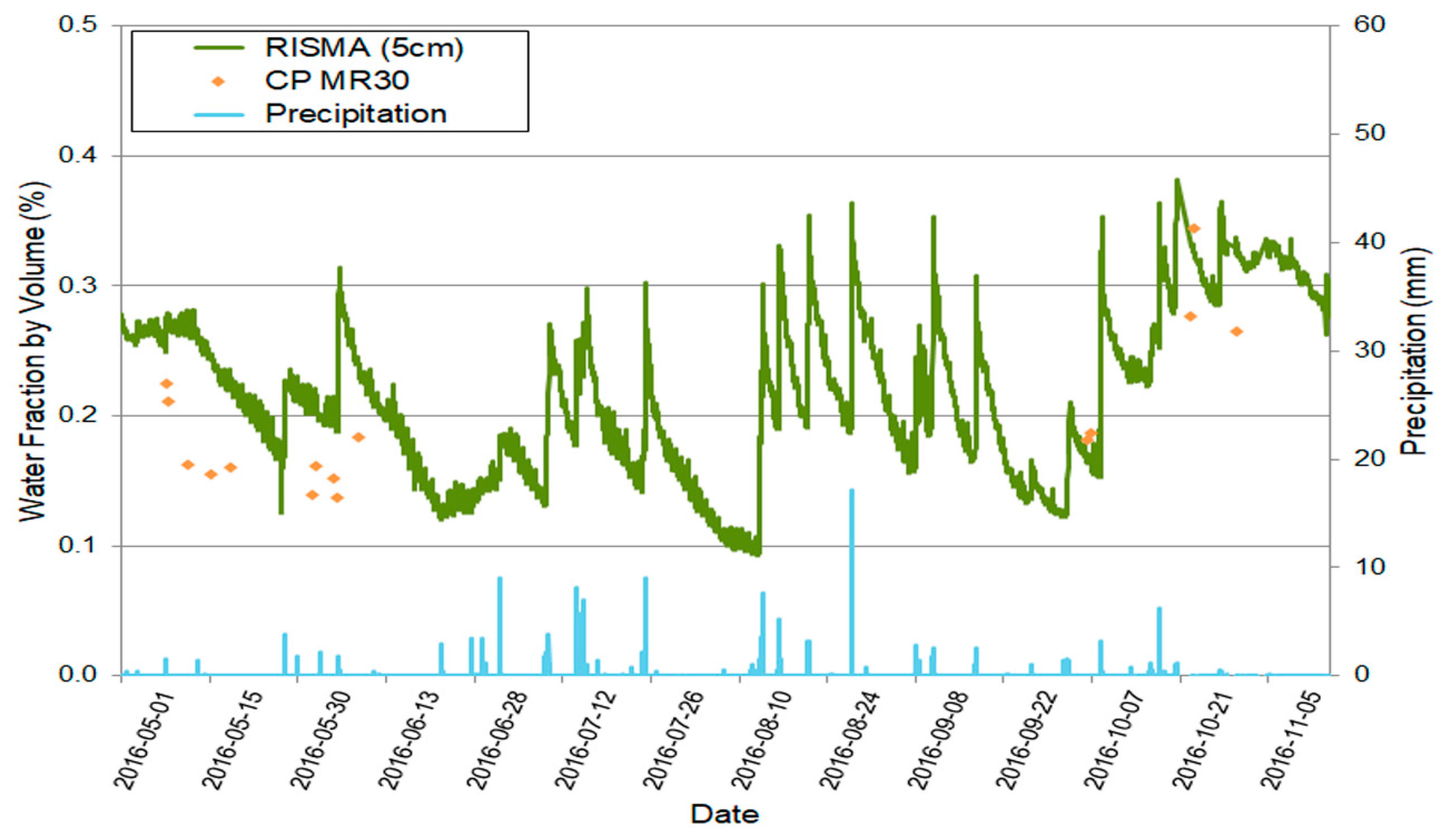
3.2.2. Validation of Estimated Soil Moisture Using In-Situ Soil Moisture Measures
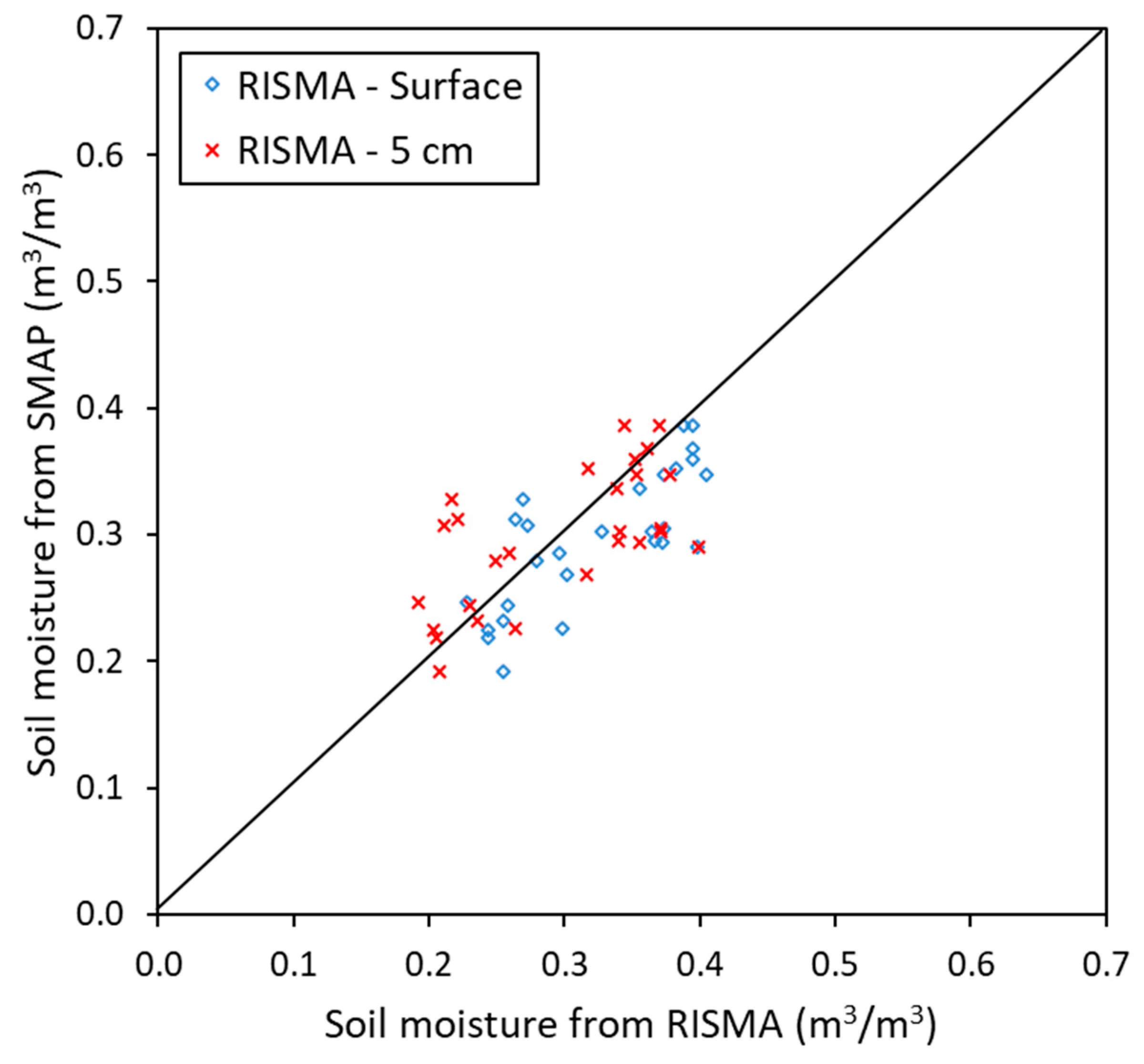
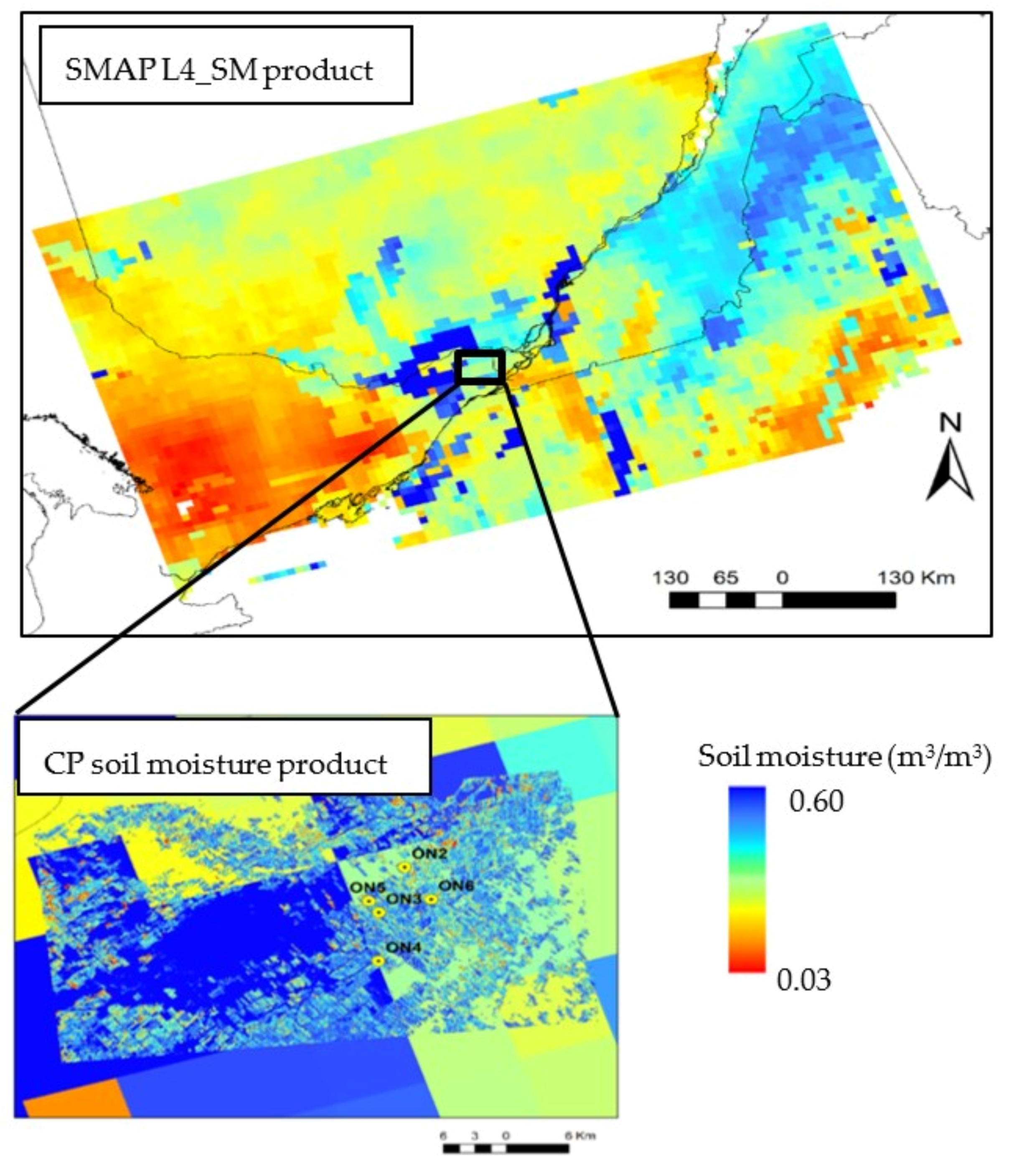
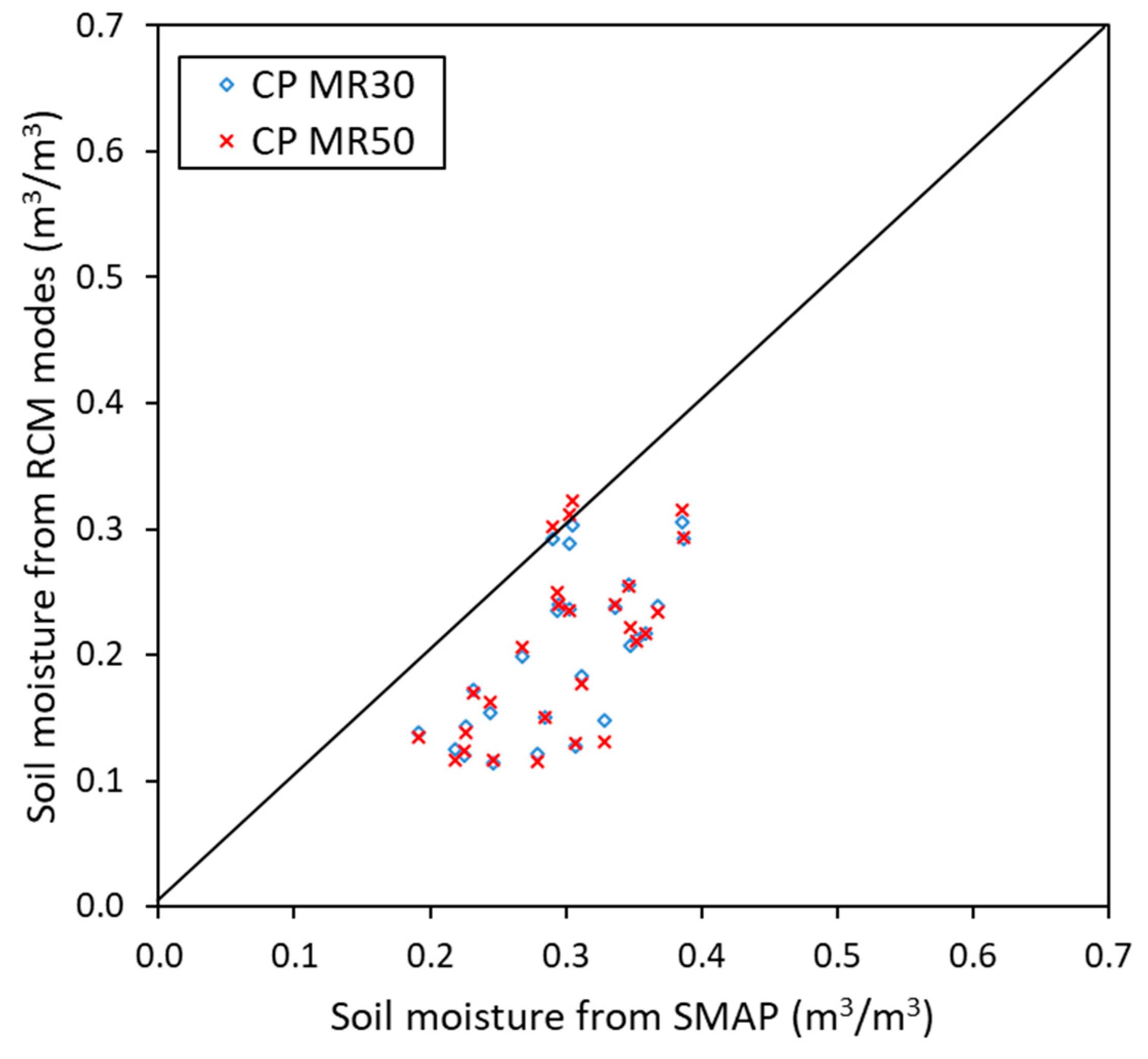
3.2.3. Regional Error Analysis and Comparison to SMAP Data
4. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Entekhabi, D. Recent advances in land–atmosphere interaction research. Rev. Geophys. 1995, 33, 995–1004. [Google Scholar] [CrossRef]
- Pablos, M.; Martínez-Fernández, J.; Piles, M.; Sánchez, N.; Vall-llossera, M.; Camps, A. Multi-temporal evaluation of soil moisture and land surface temperature dynamics using in situ and satellite observations. Remote Sen. 2016, 8, 587. [Google Scholar] [CrossRef]
- Pionner Canada. Agronomy Sciences Research Summary: Canadian Edition, 2012, 40p. Available online: https://ca.pioneer.com/west/en/agronomy/agronomy-research-summary/ (accessed on 14 January 2019).
- O’Riordan, J.; Karlsen, E.; Sandford, B.; Newman, L. Summary for Decision Makers: Climate Change Adaptation and Canada’s Crops and Food Supply; Adaptation to Climate Change Team, Simon Fraser University: Burnaby, BC, Canada, 2013. [Google Scholar]
- El Hajj, M.; Baghdadi, N.; Zribi, M.; Bazzi, H. Synergic use of Sentinel-1 and Sentinel-2 images for operational soil moisture mapping at high spatial resolution over agricultural areas. Remote Sens. 2017, 9, 1292. [Google Scholar] [CrossRef]
- Gao, Q.; Zribi, M.; Escorihuela, M.; Baghdadi, N. Synergetic use of Sentinel-1 and Sentinel-2 data for soil moisture mapping at 100 m resolution. Sensors 2017, 17, 1966. [Google Scholar] [CrossRef] [PubMed]
- Soil Moisture at Very High Spatial Resolution. Available online: www.theia-land.fr/en/product/soil-moisture-with-very-high-spatial-resolution (accessed on 30 August 2019).
- Bartalis, Z.; Wagner, W.; Naeimi, V.; Hasenauer, S.; Scipal, K.; Bonekamp, H.; Figa, J.; Anderson, C. Initial soil moisture retrievals from the METOP-A Advanced Scatterometer (ASCAT). Geophys. Res. Lett. 2007, 34, L20401. [Google Scholar] [CrossRef]
- Imaoka, K.; Kachi, M.; Kasahara, M.; Ito, N.; Nakagawa, K.; Oki, T. Instrument performance and calibration of AMSR-E and AMSR2. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2010, 38, 13–18. [Google Scholar]
- Kerr, Y.H.; Waldteufel, P.; Wigneron, J.-P.; Delwart, S.; Cabot, F.; Boutin, J.; Escorihuela, M.J.; Font, J.; Reul, N.; Gruhier, C.; et al. The SMOS mission: New tool for monitoring key elements of the global water cycle. Proc. IEEE 2010, 98, 666–687. [Google Scholar] [CrossRef]
- Entekhabi, D.; Njoku, E.G.; O’Neill, P.E.; Kellogg, K.H.; Crow, W.T.; Edelstein, W.N.; Entin, J.K.; Goodman, S.D.; Jackson, T.J.; Johnson, J.; et al. The Soil Moisture Active Passive (SMAP) mission. Proc. IEEE 2010, 98, 704–716. [Google Scholar] [CrossRef]
- Kim, H.; Lakshmi, V. Use of Cyclone Global Navigation Satellite System (CYGNSS) observations for estimation of soil moisture. Geophys. Res. Lett. 2018, 45, 8272–8282. [Google Scholar] [CrossRef]
- Martínez-Fernández, J.; González-Zamora, A.; Sánchez, N.; Gumuzzio, A.; Herrero-Jiménez, C.M. Satellite soil moisture for agricultural drought monitoring: Assessment of the SMOS derived soil water deficit index. Remote Sens. Environ. 2016, 177, 277–286. [Google Scholar] [CrossRef]
- Mishra, A.; Vu, T.; Veeti, A.V.; Entekhabi, D. Drought monitoring with Soil Moisture Active Passive (SMAP) measurements. J. Hydrol. 2017, 552, 620–632. [Google Scholar] [CrossRef]
- Pierdicca, N.; Pulvirenti, L.; Pace, G. A prototype software package to retrieve soil moisture from sentinel-1 data by using a Bayesian multitemporal algorithm. J. Sel. Top. Appl. Earth Observ. Remote Sens. 2014, 7, 153–166. [Google Scholar] [CrossRef]
- He, L.; Qin, Q.; Panciera, R.; Tanase, M.; Walker, J.P.; Hong, Y. An extension of the alpha approximation method for soil moisture estimation using time-series SAR data over bare soil surfaces. IEEE Geosci. Remote Sens. Lett. 2017, 14, 1328–1332. [Google Scholar] [CrossRef]
- Izumi, Y.; Widodo, J.; Kausarian, H.; Demirci, S.; Takahashi, A.; Tetuko, J.; Sumantyo, S.; Sato, M. Soil moisture retrieval by means of adaptive polarimetric two-scale two-component model with fully polarimetric ALOS-2 data. In Proceedings of the IEEE International Geoscience and Remote Sensing Symposium (IGARSS 2018), Valencia, Spain, 22–27 July 2018; pp. 4619–4622. [Google Scholar] [CrossRef]
- Hajdu, I.; Yule, I.; Dehghan-Shear, M.H. Modelling of near-surface soil moisture using machine learning and multi-temporal Sentinel 1 images in New Zealand. In Proceedings of the IEEE International Geoscience and Remote Sensing Symposium (IGARSS 2018), Valencia, Spain, 22–27 July 2018; pp. 1422–1425. [Google Scholar] [CrossRef]
- Tao, L.; Wang, G.; Chen, W.; Chen, X.; Li, J.; Cai, Q. Soil moisture retrieval from SAR and optical data using a combined model. IEEE J. Sel. Top. Appl. Earth Obs. 2019, 12, 637–647. [Google Scholar] [CrossRef]
- Bauer-Marschallinger, B.; Freeman, V.; Cao, S.; Paulik, C.; Schaufler, S.; Stachl, T.; Modanesi, S.; Massari, C.; Ciabatta, L.; Brocca, L.; et al. Toward global soil moisture monitoring with Sentinel-1: Harnessing assets and overcoming obstacles. IEEE Trans. Geosci. Remote Sens. 2019, 57, 520–539. [Google Scholar] [CrossRef]
- Balenzano, A.; Mattia, F.; Satalino, G.; Pauvels, V.; Snoeij, P. SMOSAR algorithm for soil moisture retrieval using Sentinel-1 data. In Proceedings of the IEEE International Geoscience and Remote Sensing Symposium (IGARSS 2012), Munich, Germany, 22–27 July 2012. [Google Scholar] [CrossRef]
- Merzouki, A.; McNairn, H. A hybrid (multi-angle and multipolarization) approach to soil moisture retrieval using the integral equation model: Preparing for the RADARSAT constellation mission. Can. J. Remote Sens. 2015, 41, 349–362. [Google Scholar] [CrossRef]
- Huang, X.Q.; Wang, J.-G.; Shang, J. An adaptive two-component model-based decomposition on soil moisture estimation for C-band RADARSAT-2 imagery over wheat fields at early growing stages. IEEE Geosci. Remote Sens. Lett. 2016, 13, 414–418. [Google Scholar] [CrossRef]
- Wang, H.; Magagi, R.; Goita, K. Comparison of different polarimetric decompositions for soil moisture retrieval over vegetation covered agricultural area. Remote Sens. Environ. 2017, 199, 120–136. [Google Scholar] [CrossRef]
- Berg, A.; Krafczek, M.; Clewley, D.; Whitcomb, J.; Akbar, R.; Moghaddam, M.; McNarin, H. Contributions of geophysical and C-band SAR data for estimation of field scale soil moisture. In Proceedings of the IEEE International Geoscience and Remote Sensing Symposium (IGARSS 2018), Valencia, Spain, 22–27 July 2018; pp. 6127–6130. [Google Scholar] [CrossRef]
- Wang, H.; Magagi, R.; Goita, K. Potential of a two-component polarimetric decomposition at C-band for soil moisture retrieval over agricultural fields. Remote Sens. Environ. 2018, 217, 38–51. [Google Scholar] [CrossRef]
- McNairn, H.; Merzouki, A.; Pacheco, A.; Fitzmaurice, J. Monitoring soil moisture to support risk reduction for the agriculture sector using RADARSAT-2. IEEE J. Sel. Top. Appl. Earth Obs. 2012, 5, 824–834. [Google Scholar] [CrossRef]
- Bhuiyan, A.K.M.; McNairn, H.; Powers, J.; Merzouki, A. Application of HEC-HMS in a cold region watershed and use of RADARSAT-2 soil moisture in initializing the model. Hydrology 2017, 4, 9. [Google Scholar] [CrossRef]
- Dabboor, M.; Sun, L.; Carrera, M.L.; Friesen, M.; Merzouki, A.; McNairn, H.; Powers, J.; Bélair, S. Comparative analysis of high-resolution soil moisture simulations from the Soil, Vegetation, and Snow (SVS) land surface model using SAR imagery over bare soil. Water 2019, 11, 542. [Google Scholar] [CrossRef]
- Charbonneau, F.J.; Brisco, B.; Raney, R.K.; McNairn, H.; Liu, C.; Vachon, P.W.; Shang, J.; Champagne, C.; Merzouki, A.; Geldsetzer, T. Compact polarimetry overview and applications assessment. Can. J. Remote Sens. 2010, 36, 298–315. [Google Scholar] [CrossRef]
- Williams, M.L. Potential for surface parameter estimation using compact polarimetric SAR. IEEE Geosci. Remote Sens. Lett. 2009, 5, 471–473. [Google Scholar] [CrossRef]
- Truong-Loï, M.; Freeman, A.; Dubois-Fernandez, P.; Pottier, E. Estimation of soil moisture and Faraday rotation from bare surfaces using compact polarimetry. IEEE Trans. Geosci. Remote Sens. 2009, 47, 3608–3615. [Google Scholar] [CrossRef]
- Dubois, P.; van Zyl, J.; Engman, T. Measuring soil moisture with imaging radars. IEEE Trans. Geosci. Remote Sens. 1995, 33, 915–926. [Google Scholar] [CrossRef]
- Ouellette, J.D.; Johnson, J.T.; Kim, S.; Van Zyl, J.; Moghaddam, M.; Spencer, M.W.; Tsang, L.; Entekhabi, D. A simulation study of compact polarimetry for radar retrieval of soil moisture. IEEE Trans. Geosci. Remote Sens. 2014, 52, 5966–5973. [Google Scholar] [CrossRef]
- Ponnurangam, G.G.; Rao, Y.S. The application of compact polarimetric decomposition algorithms to L-band PolSAR data in agricultural areas. Int. J. Remote Sens. 2018, 39, 8337–8360. [Google Scholar] [CrossRef]
- Ponnurangam, G.G.; Jagdhuber, T.; Hajnsek, I.; Rao, Y.S. Soil moisture inversion using hybrid polarimetric SAR data of RISAT-1. IEEE Trans. Geosci. Remote Sens. 2016, 54, 2033–2049. [Google Scholar] [CrossRef]
- SNC (South Nation Conservation). 2012 Annual Report. Available online: www.nation.on.ca (accessed on 10 June 2014).
- Soil Survey Reports for Ontario. CanSIS (Canadian Soil Information Service). Available online: http://sis.agr.gc.ca/cansis/publications/surveys/on/index.html (accessed on 29 July 2019).
- SNC (South Nation Conservation). 2014 Annual Report. Available online: www.nation.on.ca (accessed on 11 July 2016).
- Seyfried, M.S.; Grant, L.E.; Du, E.; Humes, K. Dielectric loss and calibration of Hydra Probe soil water sensor. Vadose Zone J. 2005, 4, 1070–1079. [Google Scholar] [CrossRef]
- Bellingham, K. The Stevens Hydra Probe Inorganic Soil Calibrations; Stevens Water Monitoring Systems: Portland, OR, USA, 2007. [Google Scholar]
- Medasani, S.; Reddy, G.U. Analysis and evaluation of speckle filters for polarimetric synthetic aperture radar (PolSAR) data. Int. J. Appl. Eng. Res. 2017, 12, 4916–4927. [Google Scholar]
- Curlander, J.C.; McDonough, R.N. Synthetic Aperture Radar: Systems and Signal Processing; Wiley: New York, NY, USA, 1991. [Google Scholar]
- Charbonneau, F.; Brisco, B.; van der Sanden, J.; Toutin, T.; Touzi, R.; Chen, H.; Liu, C.; McNairn, H.; Shang, J.; Buckley, J.; et al. RCM compact polarimetric applications developments overview. In Proceedings of the IEEE International Geoscience and Remote Sensing Symposium (IGARSS 2014), Quebec City, QC, Canada, 13–18 July 2014. [Google Scholar]
- Reichle, R.H.; De Lannoy, G.; Forman, B.A.; Draper, C.S.; Liu, Q. Connecting satellite observations with water cycle variables through land data assimilation: Examples using the NASA GEOS-5 LDAS. Surv. Geophys. 2014, 35, 577–606. [Google Scholar] [CrossRef]
- Reichle, R.H.; Koster, R.; De Lannoy, G.; Crow, W.; Kimball, J. SMAP Level 4 Surface and Root Zone Soil Moisture Data Product: L4_SM Algorithm Theoretical Basis Document (Revision A), Soil Moisture Active Passive (SMAP) Mission Science Document; JPL D-66483; Jet Propulsion Laboratory: Pasadena, CA, USA, 2014.
- Reichle, R.H.; De Lannoy, G.; Liu, Q.; Colliander, A.; Conaty, A.; Jackson, T.; Kimball, J.; Koster, R. Soil Moisture Active Passive (SMAP) Project Assessment Report for the Beta-Release L4_SM Data Product; Technical Report Series on Global Modeling and Data Assimilation; NASA/TM–2015-104606/Vol. 40; Goddard Space Flight Center: Greenbelt, MD, USA, 2015.
- Brodzik, M.J.; Billingsley, B.; Haran, T.; Raup, B.; Savoie, M.H. EASE-Grid 2.0: Incremental but significant improvements for Earth-gridded data sets. ISPRS Int. J. Geoinf. 2012, 1, 32–45. [Google Scholar] [CrossRef]
- McNairn, H.; Merzouki, A.; Li, Y.; Lampropoulos, G.; Tan, W.; Powers, J.; Friesen, M. Retrieval of field-scale soil moisture using compact polarimetry: Preparing for the RADARSAT-Constellation. In Proceedings of the IEEE International Geoscience and Remote Sensing Symposium (IGARSS 2018), Valencia, Spain, 22–27 July 2018; pp. 6135–6138. [Google Scholar] [CrossRef]
- Baghdadi, N.; Hola, N.; Zribi, M. Calibration of the integral equation model for SAR data in C-band and HH and VV polarizations. Int. J. Remote Sens. 2006, 27, 805–816. [Google Scholar] [CrossRef]
- Álvarez-Mozos, J.; Casalí, J.; González-Audícana, M.; Verhoest, N.E.C. Assessment of the operational applicability of RADARSAT-1 data for surface soil moisture estimation. IEEE Trans. Geosci. Remote Sens. 2006, 44, 913–924. [Google Scholar] [CrossRef]
- Choker, M.; Baghdadi, N.; Zribi, M.; El Hajj, M.; Paloscia, S.; Verhoest, N.E.C.; Lievens, H.; Mattia, F. Evaluation of the Oh, Dubois and IEM backscatter models using a large dataset of SAR data and experimental soil measurements. Water 2017, 9, 38. [Google Scholar] [CrossRef]
- Hallikainen, M.T.; Ulaby, F.T.; Dobson, M.C.; El-Rayes, M.A.; Wu, L.-K. Microwave dielectric behaviour of wet soil—Part I: Empirical models and experimental observations. IEEE Trans. Geosci. Remote Sens. 1985, GE-23, 25–34. [Google Scholar] [CrossRef]
- Adams, J.R.; McNairn, H.; Berg, A.; Champagne, C. Evaluation of near-surface soil moisture data from an AAFC monitoring network in Manitoba, Canada: Implications for L-band satellite validation. J. Hydrol. 2015, 521, 582–592. [Google Scholar] [CrossRef]
- van Oevelen, P.J. Soil moisture variability: A comparison between detailed field measurements and remote sensing measurement techniques. Hydrol. Sci. J. 1998, 43, 511–520. [Google Scholar] [CrossRef]
- Walker, J.P. Estimating Soil Moisture Profile Dynamics from Near-Surface Soil Moisture Measurements and Standard Meteorological Data. Ph.D. Thesis, The University of Newcastle, Callaghan, Australia, 1999. [Google Scholar]
- Ulaby, F.T.; Moore, R.K.; Fung, A.K. Microwave Remote Sensing: Active and Passive; Volume II: Radar Remote Sensing and Surface Scattering and Emission Theory; Artech House: Norwood, MA, USA, 1982. [Google Scholar]
- Zribi, M.; Gorrab, A.; Baghdadi, N.; Lili-Chabaane, Z.; Mougenot, B. Influence of radar frequency on the relationship between bare surface soil moisture vertical profile and radar backscatter. IEEE Geosci. Remote Sens. Lett. 2014, 11, 848–852. [Google Scholar] [CrossRef]
- Engman, E.T.; Chauhan, N. Status of microwave soil moisture measurements with remote sensing. Remote Sens. Environ. 1995, 51, 189–198. [Google Scholar] [CrossRef]
- Willmott, C.J. Some comments on the evaluation of model performance. Bull. Am. Meteorol. Soc. 1982, 63, 1309–1313. [Google Scholar] [CrossRef]
- Entekhabi, D.; Reichle, R.H.; Koster, R.D.; Crow, W. Performance metrics for soil moisture retrievals and application requirements. J. Hydrometeorol. 2010, 11, 832–840. [Google Scholar] [CrossRef]
- Luscombe, A. Image quality and calibration of RADARSAT-2. In Proceedings of the IEEE International Geoscience and Remote Sensing Symposium (IGARSS 2009), Cape Town, South Africa, 12–17 July 2009; pp. II-757–II-760. [Google Scholar] [CrossRef]
- Merzouki, A.; McNairn, H.; Pacheco, A. Evaluation of the Dubois, Oh, and IEM radar backscatter models over agricultural fields using C-band RADARSAT-2 SAR image data. Can. J. Remote Sens. 2010, 36, S274–S286. [Google Scholar] [CrossRef]
- Williams, D.; LeDantec, P.; Chabot, M.; Hillman, A.; James, K.; Caves, R.; Thompson, A.; Vigneron, C.; Wu, Y. RADARSAT-2 image quality and calibration update. In Proceedings of the 10th European Conference on Synthetic Aperture Radar (EUSAR 2014), Berlin, Germany, 3–4 June 2014; pp. 1–4. [Google Scholar]
- Escorihuela, M.J.; Chanzy, A.; Wigneron, J.P.; Kerr, Y.H. Effective soil moisture sampling depth of L-band radiometry: A case study. Remote Sens. Environ. 2010, 114, 995–1001. [Google Scholar] [CrossRef]
- Le Morvan, A.; Zribi, M.; Baghdadi, N.; Chanzy, A. Soil moisture profile effect on radar signal measurement. Sensors 2008, 8, 256–270. [Google Scholar] [CrossRef] [PubMed]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| CP Mode | Scatterplot | Scale | ubRMSE | RMSE | MAE | R | adjR2 | F Statistic | Significance p |
|---|---|---|---|---|---|---|---|---|---|
| MR30 | HH - RH | dB | 1.48 | 2.84 | 2.53 | 0.93 | 0.96 | 31,000 | 0.00 |
| Linear | 0.10 | 0.11 | 0.05 | 0.91 | 0.95 | 25,600 | 0.00 | ||
| VV - RV | dB | 1.49 | 2.82 | 2.50 | 0.92 | 0.96 | 26,100 | 0.00 | |
| Linear | 0.09 | 0.10 | 0.05 | 0.90 | 0.95 | 21,700 | 0.00 | ||
| MR50 | HH - RH | dB | 1.83 | 2.65 | 2.25 | 0.90 | 0.95 | 21,500 | 0.00 |
| Linear | 0.16 | 0.10 | 0.06 | 0.87 | 0.93 | 16,300 | 0.00 | ||
| VV - RV | dB | 1.66 | 3.15 | 2.84 | 0.91 | 0.95 | 28,100 | 0.00 | |
| Linear | 0.07 | 0.12 | 0.07 | 0.90 | 0.95 | 23,900 | 0.00 |
| CP Mode | Scatterplot | Slope A | Intercept B |
|---|---|---|---|
| MR30 | HH(dB) - RH(dB) | 0.85 | 0.56 |
| VV(dB) - RV(dB) | 0.77 | −0.36 | |
| MR50 | HH(dB) - RH(dB) | 0.84 | 0.26 |
| VV(dB) - RV(dB) | 0.78 | −0.67 |
| CP Mode | ubRMSE (m3/m3) | RMSE (m3/m3) | MAE (m3/m3) | R |
|---|---|---|---|---|
| MR30 | 0.02 | 0.04 | 0.04 | 0.96 |
| MR50 | 0.03 | 0.05 | 0.04 | 0.94 |
| RISMA Validation Depth | CP Mode | ubRMSE (m3/m3) | RMSE (m3/m3) | MAE (m3/m3) | R |
|---|---|---|---|---|---|
| Surface (0–5 cm) | MR30 | 0.06 | 0.14 | 0.13 | 0.71 |
| MR50 | 0.06 | 0.14 | 0.13 | 0.70 | |
| 5 cm | MR30 | 0.05 | 0.11 | 0.10 | 0.75 |
| MR50 | 0.06 | 0.11 | 0.10 | 0.75 |
| ubRMSE (m3/m3) | RMSE (m3/m3) | MAE (m3/m3) | R | |
|---|---|---|---|---|
| SMAP versus RISMA (surface) | 0.04 | 0.05 | 0.04 | 0.61 |
| SMAP versus RISMA (5 cm) | 0.04 | 0.05 | 0.04 | 0.62 |
| SMAP versus MR 30 | 0.05 | 0.11 | 0.10 | 0.61 |
| SMAP versus MR 50 | 0.05 | 0.11 | 0.10 | 0.62 |
© 2019 by Her Majesty the Queen in Right of Canada as represented by the Minister of Agriculture and Agri-Food Canada. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons by Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Merzouki, A.; McNairn, H.; Powers, J.; Friesen, M. Synthetic Aperture Radar (SAR) Compact Polarimetry for Soil Moisture Retrieval. Remote Sens. 2019, 11, 2227. https://doi.org/10.3390/rs11192227
Merzouki A, McNairn H, Powers J, Friesen M. Synthetic Aperture Radar (SAR) Compact Polarimetry for Soil Moisture Retrieval. Remote Sensing. 2019; 11(19):2227. https://doi.org/10.3390/rs11192227
Chicago/Turabian StyleMerzouki, Amine, Heather McNairn, Jarrett Powers, and Matthew Friesen. 2019. "Synthetic Aperture Radar (SAR) Compact Polarimetry for Soil Moisture Retrieval" Remote Sensing 11, no. 19: 2227. https://doi.org/10.3390/rs11192227
APA StyleMerzouki, A., McNairn, H., Powers, J., & Friesen, M. (2019). Synthetic Aperture Radar (SAR) Compact Polarimetry for Soil Moisture Retrieval. Remote Sensing, 11(19), 2227. https://doi.org/10.3390/rs11192227