1. Introduction
The U.S. Geological Survey (USGS) operates one of the largest streamflow information networks in the world, collecting water-level data at over 10,000 stations. In 2018, over 8200 of these stations continuously monitored streamflow (i.e., discharge) year-round and disseminated the data online [
1]. USGS streamflow information is queried frequently by various agencies and the general public and is used for a broad range of purposes including flood hazard warning, water resource management, and recreation. Streamflow measurement stations (gaging stations) rely upon periodic measurements made by hydrographers, with an estimated 80,000 on-site streamflow measurements collected each year to develop rating curves that relate water level to discharge [
1]. Developing remotely sensed approaches to on-site streamflow measurement could reduce or eliminate risk to hydrographers during extreme events, augment and economize current streamflow information networks, and facilitate expansion of networks into ungaged basins, including remote watersheds that are difficult to access.
Fundamentally, a streamflow computation requires measurement of two variables: the cross- sectional area of the channel and the velocity of the water flowing through that cross section. Acoustic Doppler current profilers (ADCPs) measure both of these variables. ADCP technology has evolved over the last few decades (e.g., [
2,
3]) and is now a widely used operational tool for hydrographers. Discharge and other relevant hydraulic characteristics can be viewed in real time as the ADCP traverses the channel. This real-time capability provides the hydrographer with immediate feedback in the field and allows the measurement to be repeated, if necessary, to ensure quality control and adhere to established standards of practice [
4,
5,
6].
Although ADCPs are unlikely to be supplanted by an alternative technology in the near future, hydrographers already have experienced the transition from mechanical current meters to acoustic instrumentation; the next step in the evolution of hydrometry will be driven by remote sensing. A thorough review of the extensive literature on and rapid technological advances in remote sensing of streamflow is beyond the scope of this paper. To summarize in brief, research on remote sensing of discharge and other river characteristics is being actively pursued by many academic, governmental, and commercial institutions using a wide variety of platforms and sensors including ground-based approaches [
7,
8], manned [
9,
10] and unmanned aerial vehicles [
11,
12,
13], and satellites [
14,
15].
Imagery acquired from fixed installations or airborne platforms can be used to remotely measure surface flow velocities in rivers. If floating objects (i.e., features) or textural patterns that are advected by the flow are present and the scaling (i.e., number of image pixels per meter of distance on the ground) of the imaging system and the time interval between images are known, the displacement of features or patterns between successive images can be tracked and their velocity computed. This technique, referred to as Large Scale Particle Image Velocimetry (LSPIV), has been used for decades to estimate water-surface velocity using sequences of visible imagery [
7,
16]. In addition to PIV, Particle Tracking Velocimetry (PTV) is a similar correlation-based technique for identifying and tracking particles in motion. An alternative approach relies on image-based methods (e.g., optical flow) that are applicable even in the absence of readily visible features and/or in the presence of non-stationary patterns [
17,
18].
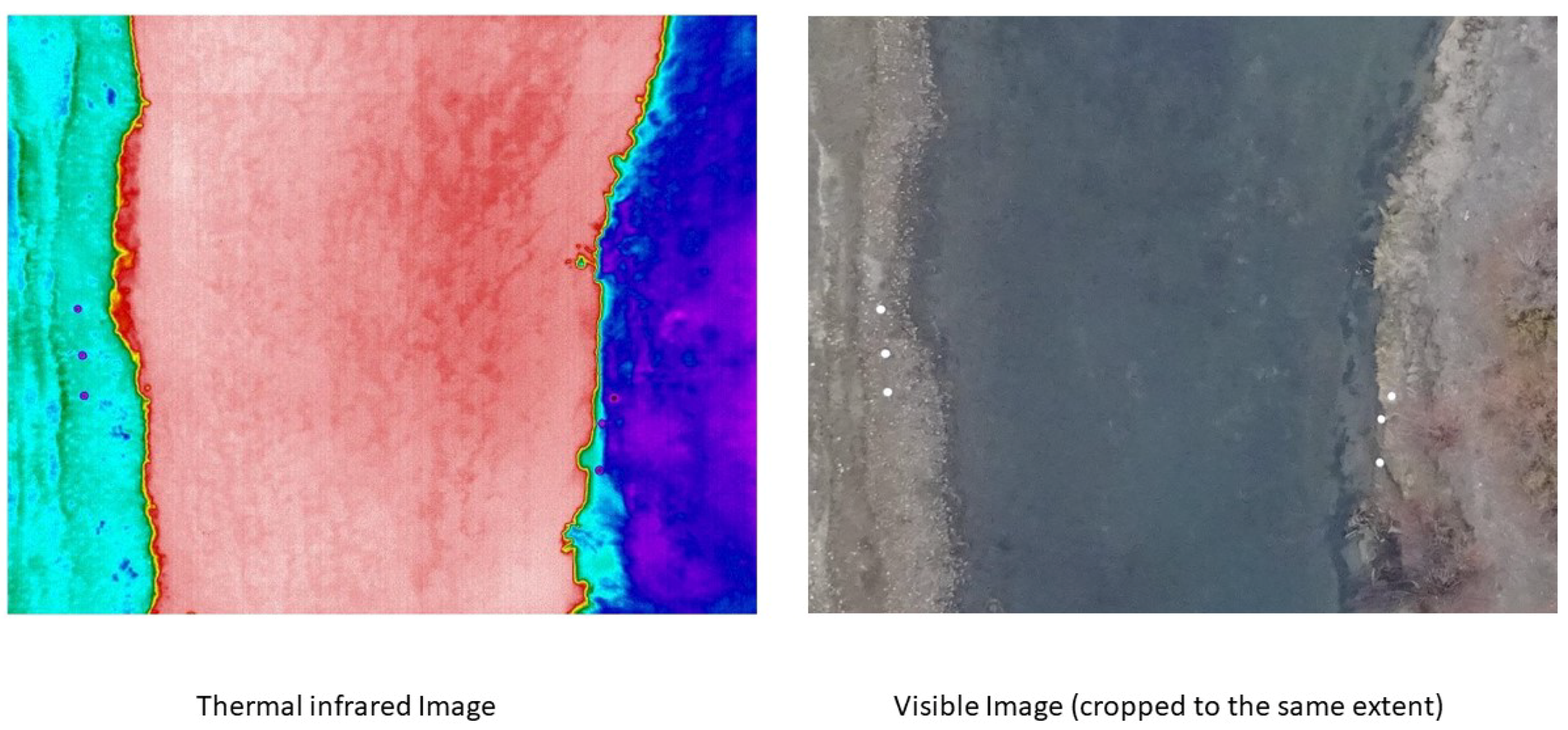
Thermal image time series also can be used for estimating surface flow velocities. Water has a high heat capacity relative to the air or ground surface. Over the course of a day, solar radiation warms the water, and this energy is stored within the water to keep its bulk temperature relatively steady after sunset. The air and the ground adjacent to the channel, in contrast, cool much more rapidly overnight. Water also is a good emitter of infrared radiation, with an emissivity close to 1. Thermal cameras measure energy emitted from the thin (100
m) surface layer of the water column [
19], and surface features produced by flow turbulence can be detected if the camera is sufficiently sensitive to subtle differences in temperature [
9,
20,
21,
22].
Although approaches for image-based surface velocity measurement have matured through the use of new sensors and/or algorithms, acquiring bathymetric information remotely has proven to be more challenging. Sensors for mapping river bathymetry can be classified as passive or active. Commonly used passive optical techniques can be broadly characterized as semi-empirical [
23,
24] or through-water stereo photogrammetric [
25,
26]. A recent comparison of these approaches is presented in [
27]. Because the amount of incoming solar radiation and the proportion of this energy reflected from the river bottom determine the signal returned to the imaging system, water clarity is a limiting factor in passive optical mapping of river bathymetry [
24]. Similarly, although some alternative approaches to calibrating image-derived quantities to water depth have been proposed [
28,
29], spectrally based passive optical techniques typically require simultaneous field measurements to establish an empirical relationship between depth and reflectance; through-water stereo photogrammetric techniques do not require such calibration [
25,
26].
In the last 20 years, an active form of remote sensing known as airborne laser bathymetry that was initially developed in coastal environments [
30] has seen increased application in river studies [
31,
32,
33,
34]. However, water clarity and bottom reflectivity can limit the success of any passive or active optical method applied in rivers, including bathymetric lidar surveys [
33,
35]. Another active remote sensing alternative is ground penetrating radar (GPR), which has been used to measure bathymetry from terrestrial [
36,
37] and airborne platforms [
38]. While GPR is sensitive to the specific conductance of the water (values over 1000 microSiemens/cm absorb the signal [
37]), the technology has been applied in rivers with suspended sediment values up to 10,000 mg/L [
36]. Thus, GPR technology shows promise for non-contact bathymetric mapping in freshwater rivers with high concentrations of suspended sediment.
The objectives of this paper are to demonstrate the application of sUAS-based thermal velocimetry and polarizing lidar for measuring surface flow velocity and cross-sectional area, respectively. When combined, these two components provide an integral, fully non-contact method of measuring river discharge. The following sections detail how the two instruments were deployed, describe the field data collected for accuracy assessment, and compare remotely sensed estimates of river discharge to in situ flow measurements.
4. Discussion
4.1. Potential Sources of Uncertainty in Remotely Sensing of Streamflow
Although various remote sensing technologies could potentially facilitate more efficient, safer measurement of streamflow, the uncertainties inherent to these methods must be acknowledged. Ultimately, our objective was to obtain information on river discharge entirely from remotely sensed data, but this process involved measuring the two fundamental hydraulic quantities that comprise discharge: velocity and depth. In the following subsections, we examine the uncertainties associated with each of these variables in turn and then discuss the implications of these sources of error for discharge calculations.
4.1.1. Uncertainties Associated with Thermal PIV-Based Velocity Estimates
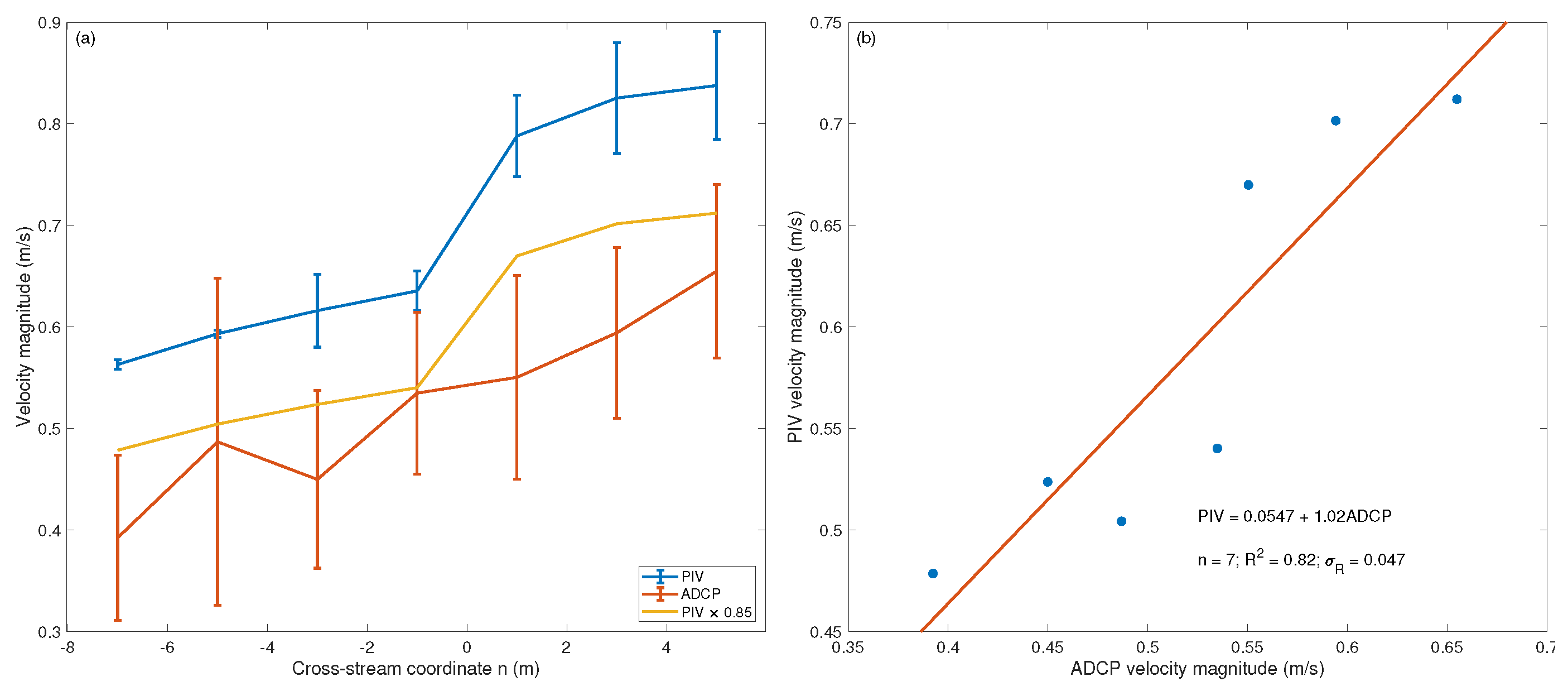
Thermal PIV- and ADCP-based velocities observed along Blue River cross section 1 were compared in
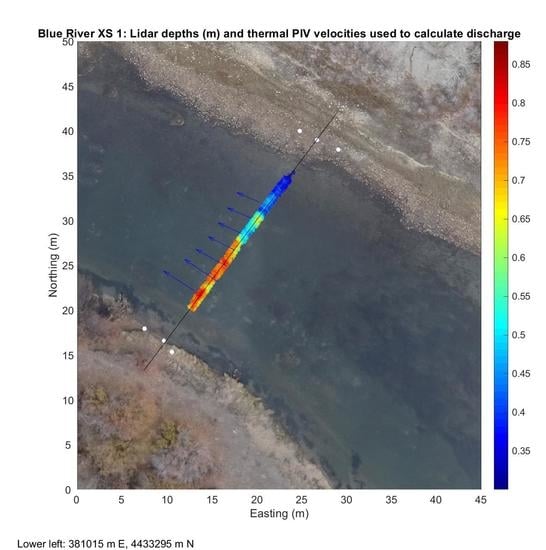
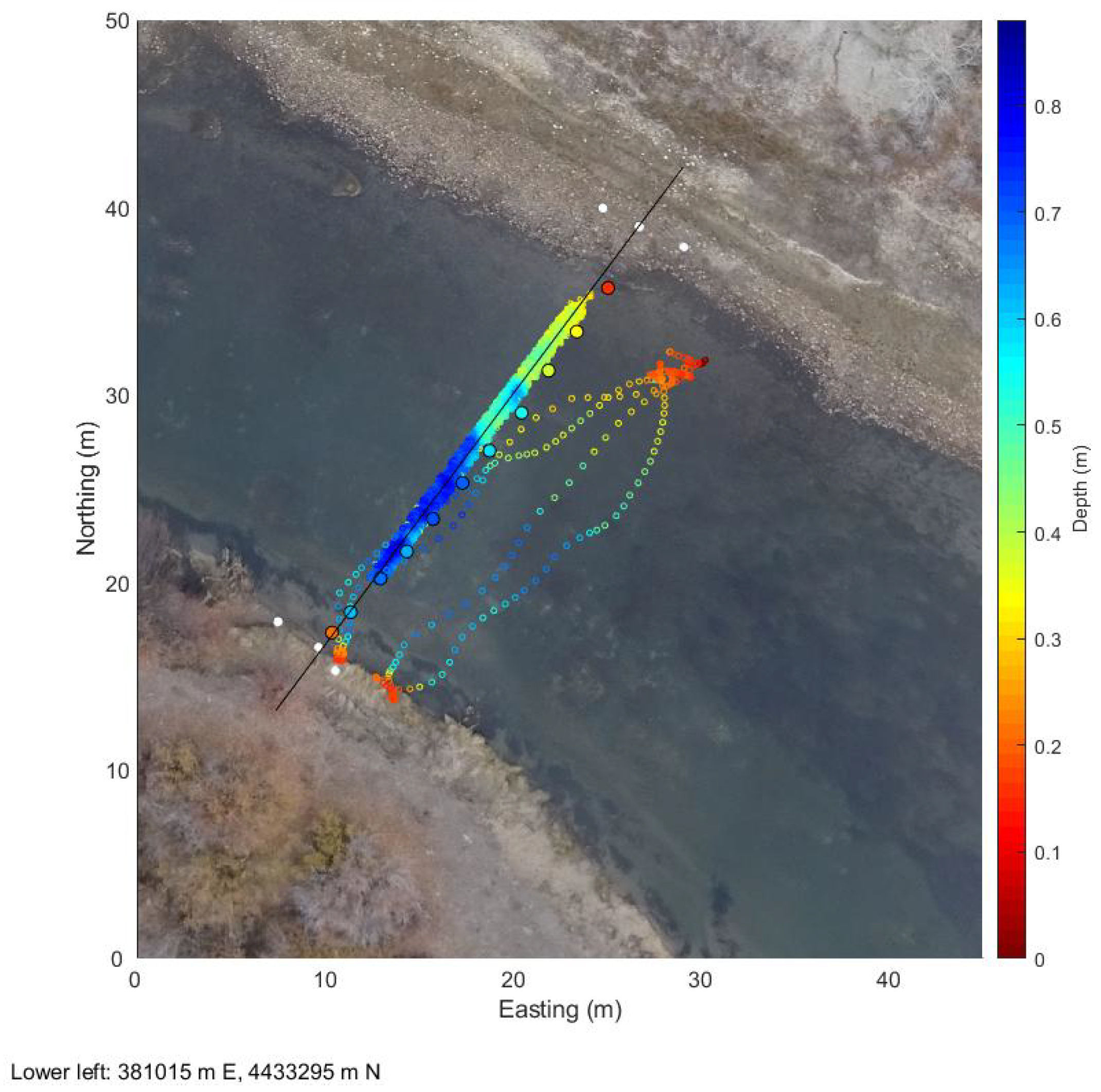
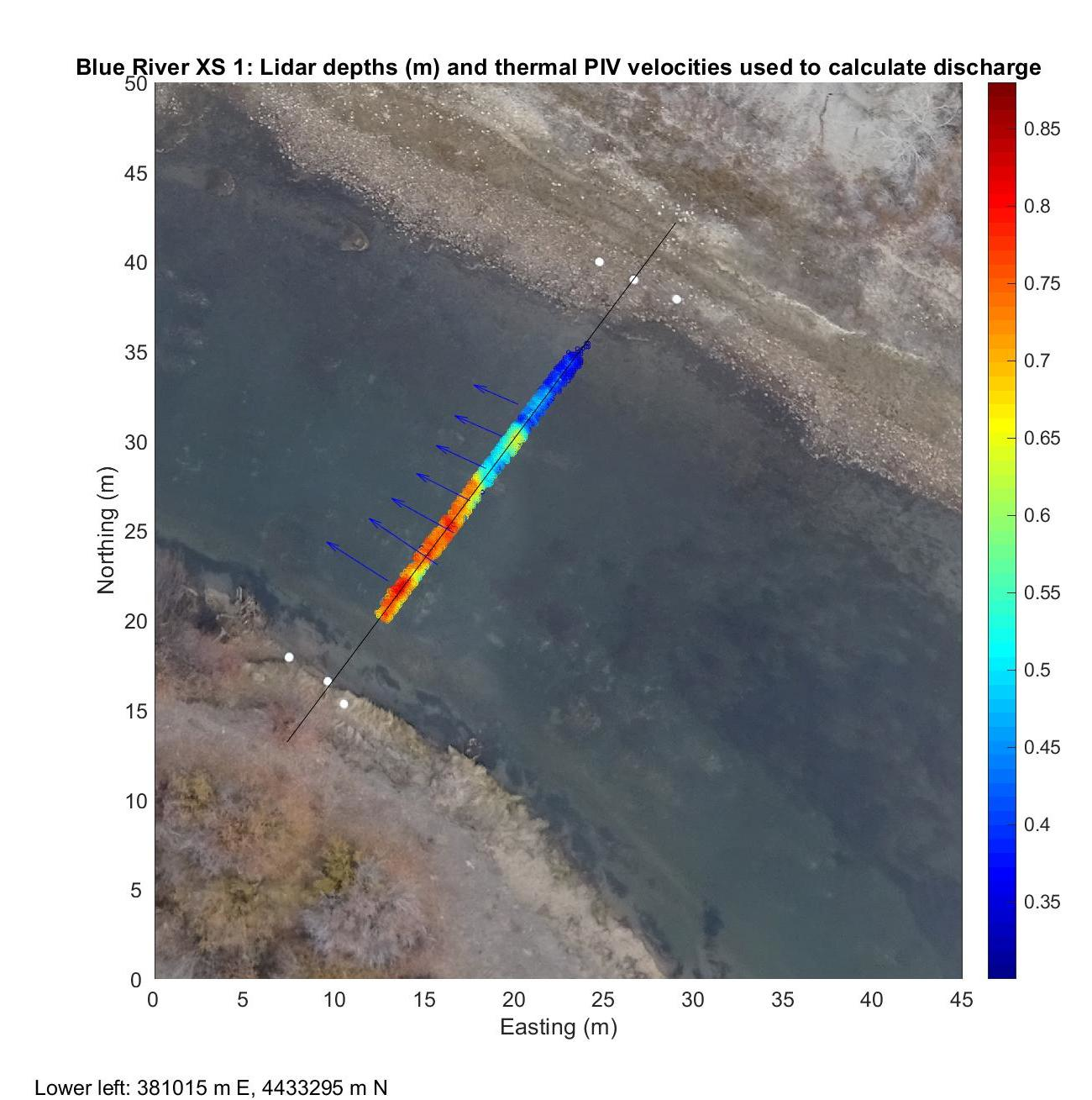
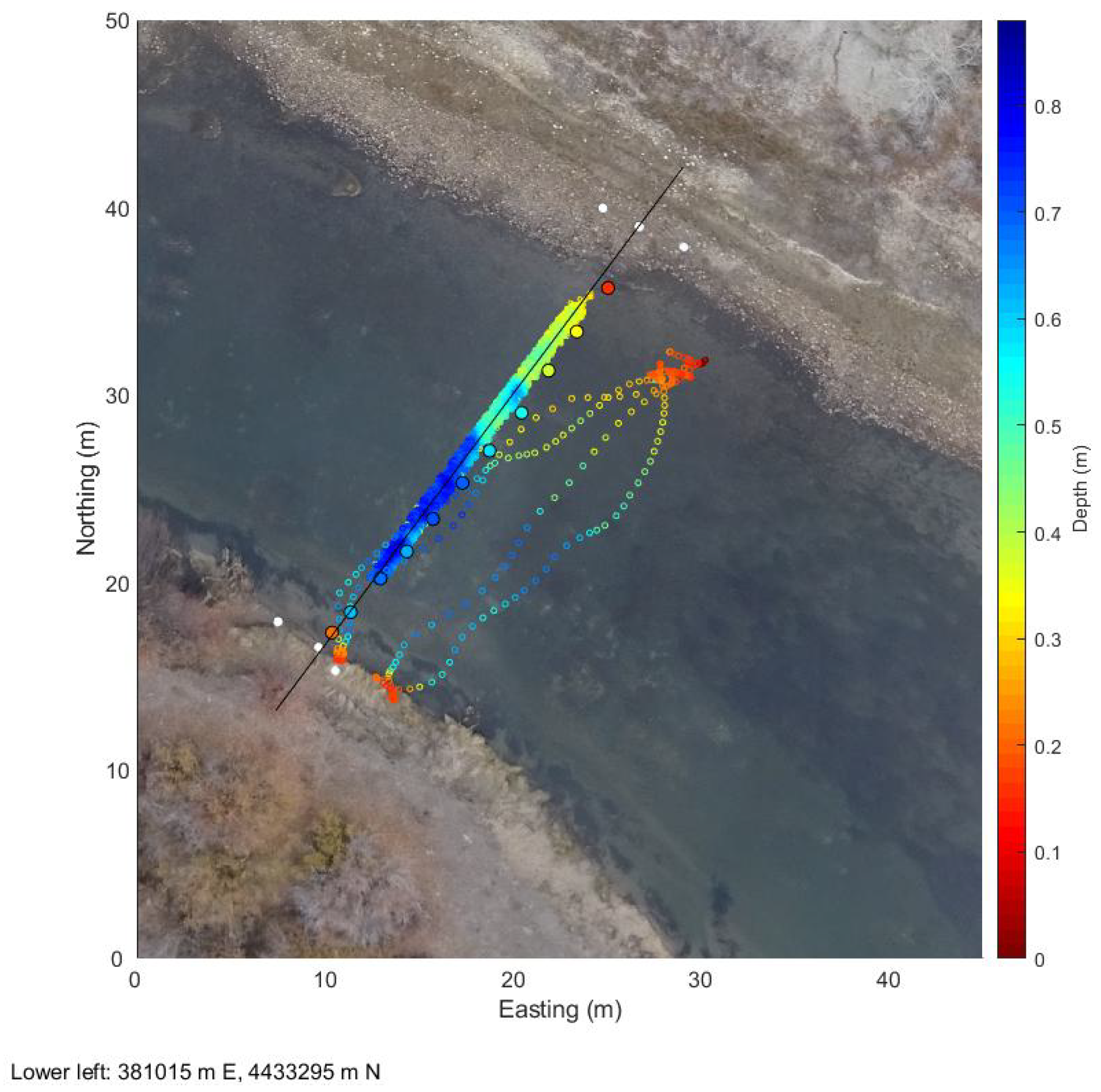
Figure 5. For both types of data, the width of the error bars represents the range of velocities present within the spatial-averaging window, providing an indication of measurement precision. The ADCP yielded wider error bars than the PIV because the ADCP data consisted of instantaneous velocity profiles collected as the instrument traversed the channel, whereas the PIV-derived velocities were time-averaged over the one-minute acquisition period. In addition, the ADCP data were collected on four passes that were not exactly coincident with one another and had to be spatially aggregated. The output from the PIV algorithm, in contrast, was a regular grid of velocity vectors with a spacing dictated by the interrogation window and step size parameters we selected. This regular sampling provided a more smoothly varying pattern of cross-stream velocities as well as narrower error bars. Another advantage of PIV is that the method is image-based and produces continuous coverage (i.e., a velocity field) throughout the central portion of an image, not just a single isolated transect (
Figure 3). This type of data thus provides greater flexibility in coupling velocity estimates with other data sources, such as bathymetry.
An important limitation of thermal PIV is that this method yields only a surface flow velocity that must somehow be converted to a depth-averaged velocity prior to discharge calculation; this shortcoming pertains to any surface-based velocity measurement technique (e.g., PIV of optical images, radar, GPS-based drifters). Typically, this conversion is achieved by multiplying the surface velocity by a velocity index
and this approach brought the PIV-based surface velocities for Blue River cross section 1 to within the error bars of the ADCP data collected along this transect (
Figure 5a). We used a value of 0.85, the most common velocity index e.g., [
45], but a lower value would have provided better agreement between the PIV- and ADCP-based velocities. Using a velocity index of 0.85 overestimated the depth-averaged velocity in this case, resulting in a positive intercept term for the regression equation in
Figure 5b that indicated a positive bias of the PIV-based velocities relative to the ADCP measurements. In general, the velocity index depends on the vertical structure of the flow field and thus varies among rivers and even locally within a reach. For example, Legleiter et al. [
22] calculated velocity indices that ranged from 0.82 to 0.93 for five rivers in Alaska. Such variability in the velocity index will introduce a multiplicative error to any surface velocity estimate inferred from remotely sensed data.
4.1.2. Uncertainties Associated with Depths Inferred from Polarized Lidar
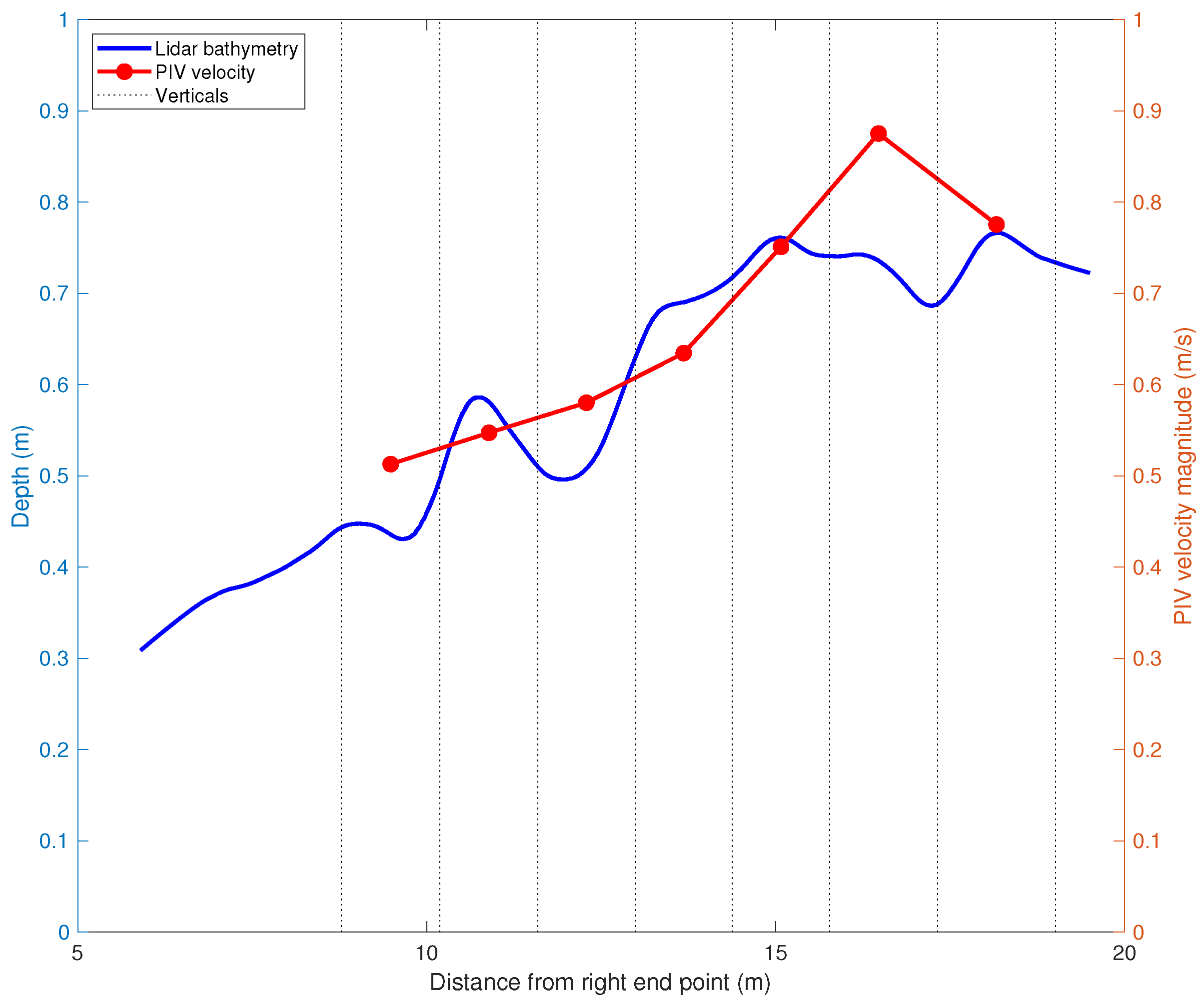
Depths measured while wading, by the ADCP and via lidar, were compared in
Figure 6. Making this comparison involved determining the best-fit line through the horizontal coordinates of the lidar point cloud and projecting both types of field data onto this line. Although the wading measurements were fewer in number, they were in closer proximity to the lidar transect than the four more irregular passes of the ADCP, which could have contributed to the closer agreement between the lidar-based depths and the wading surveys. Because the wading survey coincided spatially with the lidar swath and consisted of a single transect that did not require spatial averaging, this data source was the most reliable independent check on the accuracy of the lidar-based depths. Relative to the wading data, the ADCP tended to underestimate the depth whereas the lidar was generally biased deep. However, the lidar appears to have captured more subtle features of the bed topography, such as the prominent bump located 12 m from the right end point in
Figure 6a.
Another source of uncertainty in comparing the lidar to our field measurements was the nature of the river bed itself. Although the bed was primarily composed of sand and gravel, some submerged aquatic vegetation was also present. Whereas some of the laser pulses might have reflected off the top of the substrate surface (e.g., protruding gravel, vegetation canopy), the survey rod used while wading was more likely to come to rest at lower elevations within the sand, between gravels, or at the base of any plants. One thus might expect the unfiltered lidar point cloud to underestimate the depth relative to the wading survey. For cross section 1 on the Blue River, however, the lidar tended to overestimate the depth. The linear regression used to compare the lidar to the wading depths indicated a strong agreement (
), but the intercept term of 0.05 m confirmed the positive bias evident in
Figure 6a over the 0.3–0.7 m range of depths sampled along this transect. For cross section 2 (
Supplemental Materials Figure S2), the lidar retrieved depths up to 1.2 m but a similar positive intercept of 0.06 m was observed.
Although an explanation for this deep bias is not immediately obvious, one factor that could contribute to this surprising result is the difficulty of identifying the water surface. Lidars do not directly measure the depth but rather calculate the depth as the difference between the range to the water surface and the river bed, as determined from the time of flight of laser pulses returned to the sensor. Any error in establishing the location of the water surface will affect depth estimation because both the refraction of the laser pulse and the change in the speed at which it travels must be accounted for at the air-water interface. The ASTRALiTe polarizing lidar provides an alternative means of distinguishing water surface and bottom returns, which can prove challenging for more common waveform-based bathymetric lidars, particularly in shallow depths where the air-water interface and the stream bed are in such close proximity to one another. However, the initial results presented herein suggest that incorporating polarization information did not enable a completely reliable, binary classification of returns as either water surface or bottom. More specifically, the ASTRALiTe lidar system consists of two channels. The nominal “water-surface channel“ can detect returns from the river bottom when none of the laser pulses experience a specular reflection from the water surface and return to the sensor. This situation is more likely to occur at greater off-nadir angles along the edges of the swath. Similarly, the nominal “bottom surface channel“ can record reflections from the water surface when the specular return from the water surface is strong and overwhelms the optics of the sensor.
4.1.3. Implications for Discharge Calculations
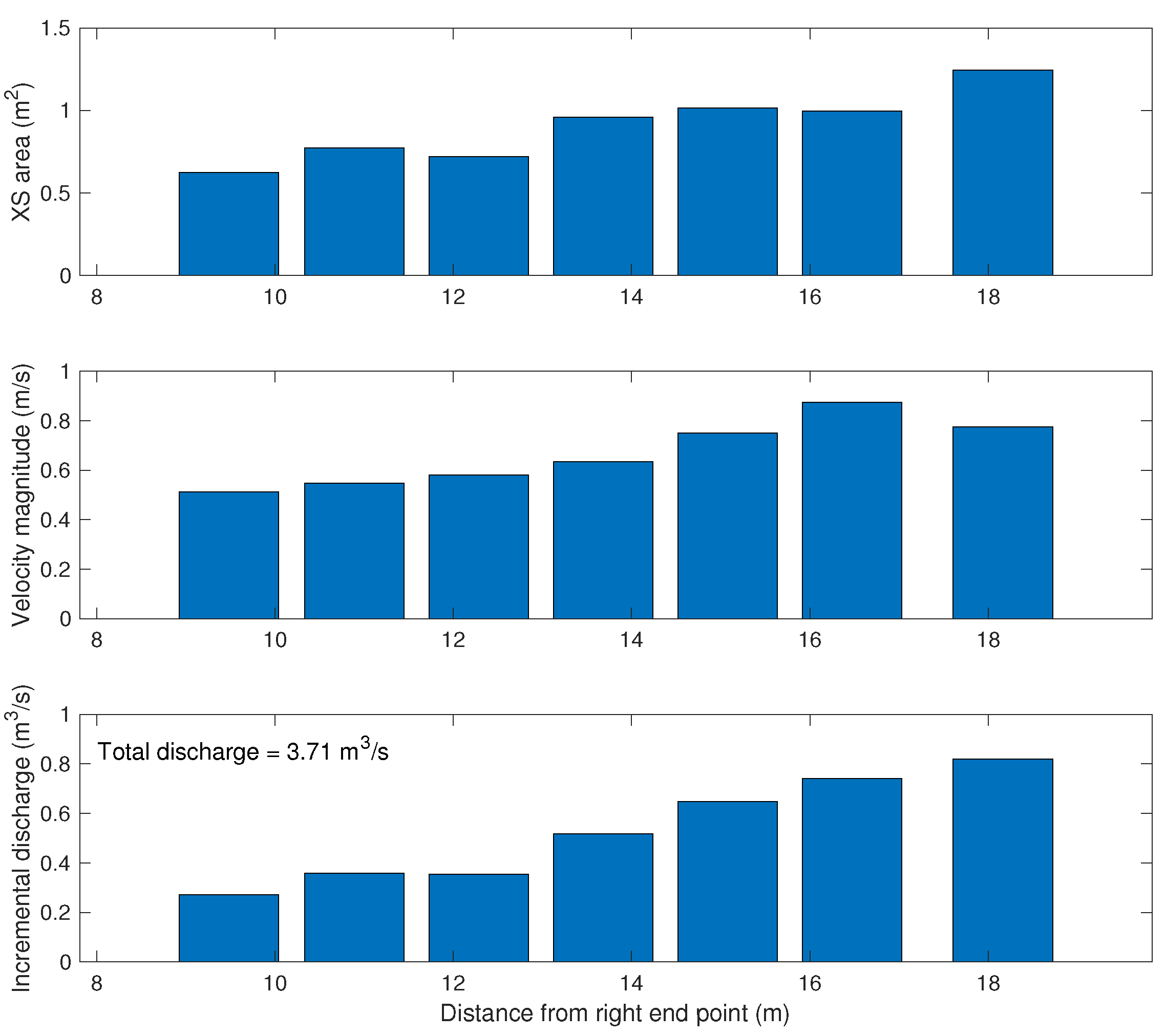
The hydraulic quantities computed from the remotely sensed data and in situ ADCP measurements collected are compared in
Table 3. For both cross sections, the mean velocities and cross-sectional areas determined by the remote sensing approach were greater than those calculated from the ADCP measurements. Because each of these components was overestimated when inferred from remotely sensed data, the discharges calculated from thermal PIV and bathymetric lidar exceeded those based on the ADCP data. As shown in
Figure 5, even after applying a velocity index of 0.85 thermal PIV overestimated the corresponding ADCP-derived depth-averaged velocity, which in turn lead to overestimation of the discharge. Similarly, the deep bias observed for the lidar bathymetry (
Figure 6) yielded greater cross-sectional areas than the field surveys and also contributed to the overestimation of discharge. In general, an overprediction of the mean velocity from remotely sensed data could be compensated for by an underprediction of the cross-sectional area or vice versa, but for both of the cross sections sampled on the Blue River overestimation of both hydraulic quantities ensured that the total discharge would be overpredicted relative to the field measurements.
A notable feature of
Table 3 is that the discharges calculated for the two cross sections, which were located in close proximity to one another, differed by 2.62 m
/s for the remote sensing approach and by 3.27 m
/s for the ADCP-based calculation. In addition, the agreement between the remote sensing and field-based discharges was much better for cross section 2, with only a 0.1% discrepancy at this transect, whereas the discharge was overestimated by the remotely sensed data by 22% at the upstream transect. These differences between the two cross sections are primarily a consequence of the greater coverage achieved by the lidar at cross section 2, where the sUAS was able to safely traverse the entire channel width. Vegetation along the left bank at cross section 1 prevented the sUAS from sampling the left side of the channel and restricted our discharge calculation to only a portion of the width. Because most of the flow through this reach of the Blue River was concentrated along the left side of the channel, a lack of data from this area precluded us from calculating an accurate total discharge for cross section 1. For the other transect, more complete coverage resulted in a calculated discharge closer to the value of approximately 6 m
/s recorded at the upstream USGS gaging station (09057500 Blue River below Green Mountain Reservoir, CO).
4.2. Practical Considerations for Remotely Sensing of River Discharge
This initial pilot study revealed a number of factors that must be considered carefully in any application of an sUAS-based remote sensing approach to measuring river discharge. In this section, we discuss some of the practical lessons we learned to help guide future work based on the methodology described herein. We describe both instrumentation-related issues and operational restrictions that must be taken into account during mission planning.
Through several previous attempts to infer surface flow velocities from thermal image time series, we learned that suitable image data can only be acquired under certain environmental conditions. The thermal features tracked by the PIV algorithm are most pronounced when the temperature contrast between the water and the overlying air is greatest. This is most likely to occur at dawn when the air has cooled more overnight than the water, which has a much higher specific heat capacity. During the day, the air and water temperatures tend to converge, obscuring the water-surface thermal features of interest. In addition, reflected solar energy can become a significant fraction of the radiation recorded by the thermal camera when the sun is higher in the sky. Another way to enhance the detection of subtle differences in temperature is to use a cooled mid-wave infrared thermal camera. This type of sensor has a greater sensitivity, typically with a noise equivalent temperature difference <0.025 °C, and thus provides better clarity and contrast than more readily available uncooled thermal cameras. However, disadvantages of cooled thermal cameras include greater cost, larger size, and susceptibility to reflections from the sun [
48]. Pixel size, frame acquisition rate, data capture rate, and on-board data storage capacity are also important criteria to evaluate in selecting an appropriate thermal camera.
Although this was the initial field test of the sUAS-based ASTRALiTe edge lidar in a river, we can make some general statements about the use of this technology for measuring river bathymetry. As with airborne lidar, water clarity is an important constraint on the ability of laser pulses to penetrate through the water column to the stream bed. Substrate reflectivity can also limit the number of bottom returns. While a more powerful laser might help to overcome these obstacles, greater power would likely come at the expense of a heavier payload that would not be conducive to sUAS deployments. Regulations that ensure eye safety also constrain the amount of laser power a lidar system can use. In this study, flying the ASTRALiTe edge 4 m above the water surface provided a high density of bottom returns in a clear-flowing channel up to 1.2 m deep. However, this low flying height limited the coverage that could be achieved because riparian vegetation presented a hazard to the sUAS. In designing and deploying a bathymetric lidar system, a safe compromise must be reached between at least three principal factors: (1) laser power and penetration depth, (2) system weight and flight duration, and (3) flying height and obstacle avoidance.
In addition to these instrumentation-related issues, regulatory restrictions also can limit the suitability of sUAS-based remotely sensed data for characterizing streamflow. Ideally, an sUAS would be flown high enough for the imaging system to capture not only the entire channel width but also at least a small area along the banks so that targets placed to provide ground control are visible. In this study, however, a small local airport with one runway located 2 km from our study area dictated a maximum flight altitude of 100 m, per Federal Aviation Administration (FAA) regulations. As a result, the channel and both banks were only included in a single image for one of the two cross sections. For the second, wider transect, two separate hovering waypoints were required to image both banks, which was necessary because spatially distributed ground control is needed to accurately scale and geo-reference the images and the velocity vectors derived therefrom. For cross section 2, the lack of targets on both sides of the images complicated geo-referencing and we used images acquired from only one of the two waypoints for PIV and discharge calculation. At this location, the vast majority of the flow was captured by images of the left side of the channel. Images from the right side encompassed a broad shallow area dominated by submerged vegetation that conveyed a negligible portion of the total river discharge. This local configuration allowed us to derive a reasonable discharge estimate from an image sequence that did not span the entire channel width, but this will not be the case in general. More typically, restrictions on flying height could dictate that partial discharges derived from multiple image sequences distributed laterally across the channel be combined to obtain the total discharge.
4.3. Future Research Directions
This pilot study served as an initial test of the feasibility of measuring river discharge via sUAS-based remote sensing and also highlighted some important topics for further investigation. In this section, we discuss some potential refinements to instrumentation and make suggestions to improve data collection and processing.
Although the sensors used in this study fulfilled their intended purpose, both the thermal camera and polarizing lidar system will require further development and testing before this approach can become more broadly applicable. For example, the frame acquisition and data capture rate of the thermal camera was limited to a relatively low 0.5 Hz, much less than the 25–30 Hz frame rates typically used in LSPIV applications based on conventional video cameras. In this case study, the low frame rate did not compromise PIV due to the relatively low surface flow velocities observed along the Blue River at a base flow discharge in late fall but could prove to be problematic at higher discharges and/or in more energetic channels. Similarly, the sensitivity of the lidar to various environmental conditions must be examined through additional field tests. Whereas the water surface of the Blue River was very smooth at the time of this study, rougher water surface textures could affect the interaction of laser pulses with the air-water interface and thus reduce the accuracy of lidar-derived bathymetric information. The Blue River also was relatively clear at the time of our survey, but the lidar system would not be expected to perform as well in more turbid water. Our study site only included depths up to 1.2 m, so further testing in deeper rivers is needed to quantify the maximum penetration depth of the ASTRALiTe edge. In the initial field evaluation described herein, the thermal camera and the lidar were deployed independently on separate sUAS, but in the future this instrumentation package could be deployed from a single sUAS platform. However, such consolidation would increase the weight of the payload and reduce flight duration and thus would only be beneficial if both sensors could acquire useful data from the same flying height.
Improvements to the data collection and processing we performed in this study could help remote sensing to become a viable operational tool for measuring river discharge. For example, in future field evaluations a cable (i.e., tagline) should be stretched across the channel for two reasons. First, the tagline would provide a clear linear feature that the pilot could use for guidance while operating the sUAS manually, rather than relying upon pre-programmed waypoints and automated navigation. Second, the tagline would facilitate collection of in situ velocity verification data by guiding the ADCP along a straight transect coincident with the lidar swath, rather than the irregular passes that we recorded in this study. Another, more general issue that requires further research is the selection of an appropriate velocity index to convert PIV-based surface velocities to depth-averaged velocities prior to calculating discharge. In this study we scaled and geo-referenced the thermal images based on ground control targets placed in the field, but a more efficient alternative would be direct geo-referencing of the images using position and orientation data logged on-board the sUAS; this approach would obviate the need to place ground control targets along the banks and/or in the river. If absolute spatial coordinates are not necessary for a given application, only the scale factor for converting pixels to meters is needed to perform PIV. This scale could be established by using a laser range finder or ultrasonic sensor to measure the distance from the sUAS down to the water surface and calculating the ground sampling distance based on the focal length of the camera. Finally, although the current workflow would require a hydrographer to collect data in the field and then post-process the images and analyze the lidar before performing a discharge computation, this workflow could be streamlined if some of this processing (i.e., PIV) could be performed in real-time on-board the sUAS, on the sensor directly, or processed on the ground control station system. Performing the data processing outside of the sUAS increases portability by keeping the sensor independent of the platform, thus providing the greatest flexibility for deployment. In addition, further development of the lidar processing algorithms could allow the point cloud to be visualized by an operator on the ground. This type of real-time feedback would help to ensure that remote sensing-based measurements of velocity and depth are of sufficient quality.
5. Conclusions
Remote sensing offers the potential to improve the safety of the hydrographer and increase the efficiency of on-site streamflow measurements. These advances would also allow the USGS and similar agencies worldwide to expand their hydrologic monitoring networks into remote, inaccessible locations and ungaged basins. Recent technological developments have reduced the size, weight, and power consumption of sensors to a degree that instrumentation that previously could only be carried on conventional occupied aircraft now can be deployed from sUAS platforms. In this paper, we describe a complete technique for collecting both the surface flow velocity and bathymetric data necessary to compute river discharge from an sUAS under natural conditions. This approach involved the use of a thermal infrared camera, a PIV algorithm, and a polarizing lidar. Importantly, the sensors, platforms, and software used in this study are all commercially available at this time, not just prototypes in an early stage of development.
We evaluated the performance of this approach by comparing remotely sensed velocities and depths to field measurements collected at two cross sections along the Blue River, CO, USA. The results of this investigation support the following principal conclusions:
Compact, sUAS-deployable thermal infrared cameras of sufficient sensitivity can detect the movement of flow features expressed at the water surface as subtle differences in temperature, thus enabling PIV without requiring visible tracer materials or artificial seeding of the flow.
Incorporating information on the polarization of returned laser pulses provides an alternative means of distinguishing the water surface from the channel bed even in very shallow water; these polarizing lidar systems also are small enough to be deployed from an sUAS.
Due to limited payload capacity and differences in flying height during data collection, the thermal camera and polarizing lidar had to be deployed from separate sUAS.
Surface flow velocities inferred from thermal images via PIV agreed closely ( = 0.82 and 0.64) with depth-averaged flow velocities measured in situ with an ADCP when multiplied by the commonly assumed velocity index of 0.85.
Depths derived from the polarizing lidar closely matched those surveyed by wading in the shallower of the two cross sections ( = 0.95), but the agreement was not as strong for the transect with greater depths ( = 0.61), although the sensor was able to detect the bottom in depths up to 1.2 m.
These remotely sensed velocities and depths were combined to calculate incremental discharges that were summed laterally across the channel to obtain the total streamflow. As compared with discharges calculated in a similar manner directly from the ADCP data, the sUAS-based methodology resulted in a discharge that was 22% greater at one cross section but within 0.1% of the ADCP-based discharge at the second cross section.











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}