Evaluation of Different Machine Learning Methods and Deep-Learning Convolutional Neural Networks for Landslide Detection

 ,
,  ,
,  ,
,  ,
,  and
and 
Abstract
:
1. Introduction
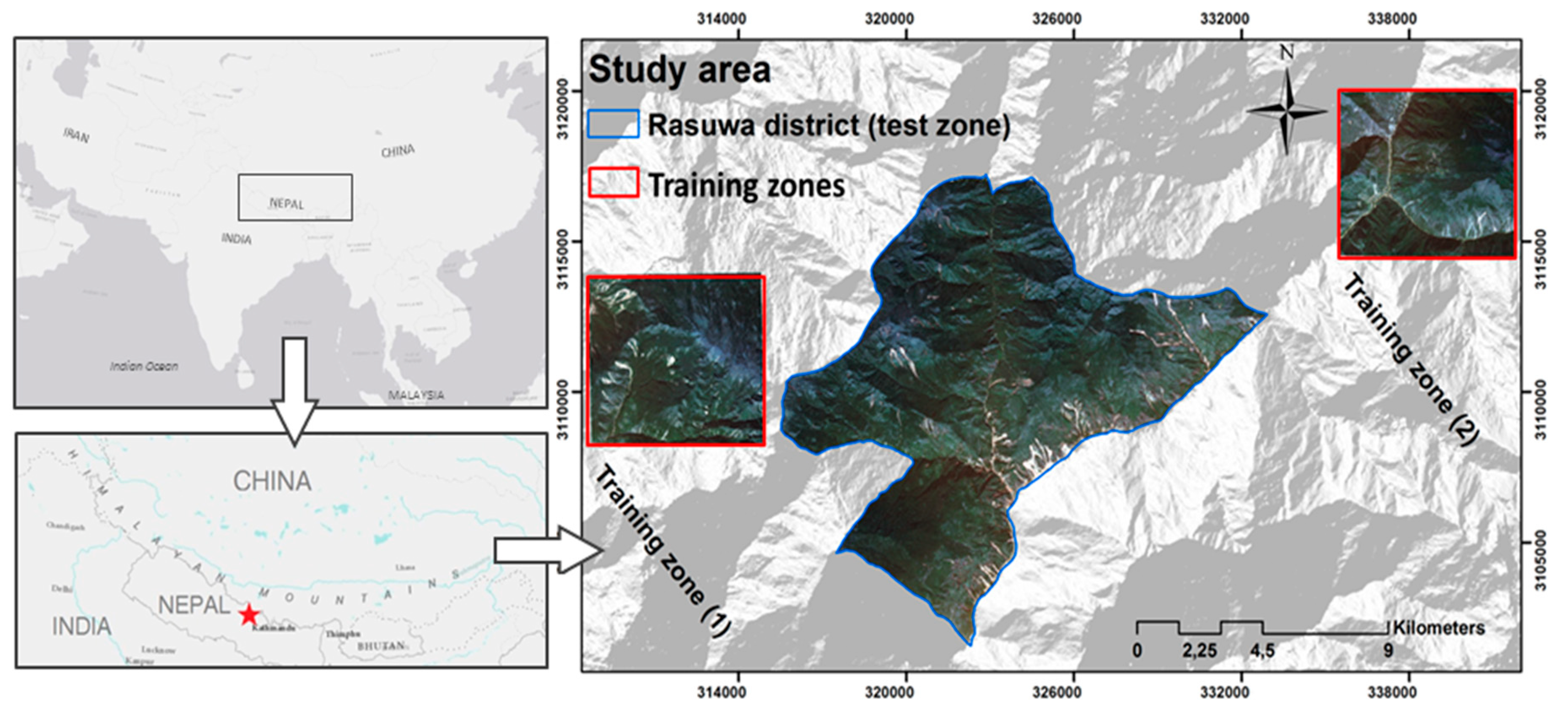
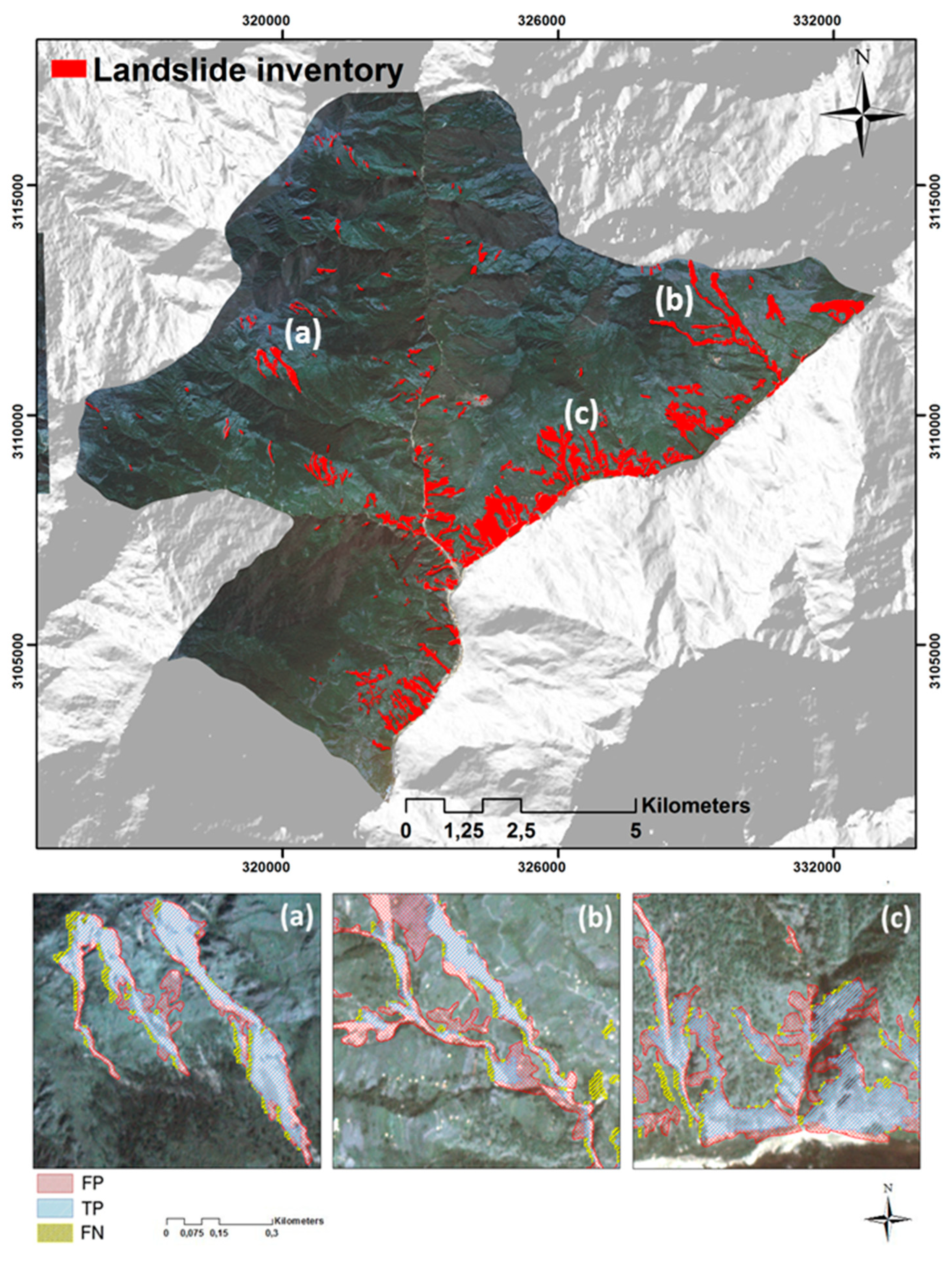
2. Overview of the Study Area
3. Workflow
3.1. Overall Methodology
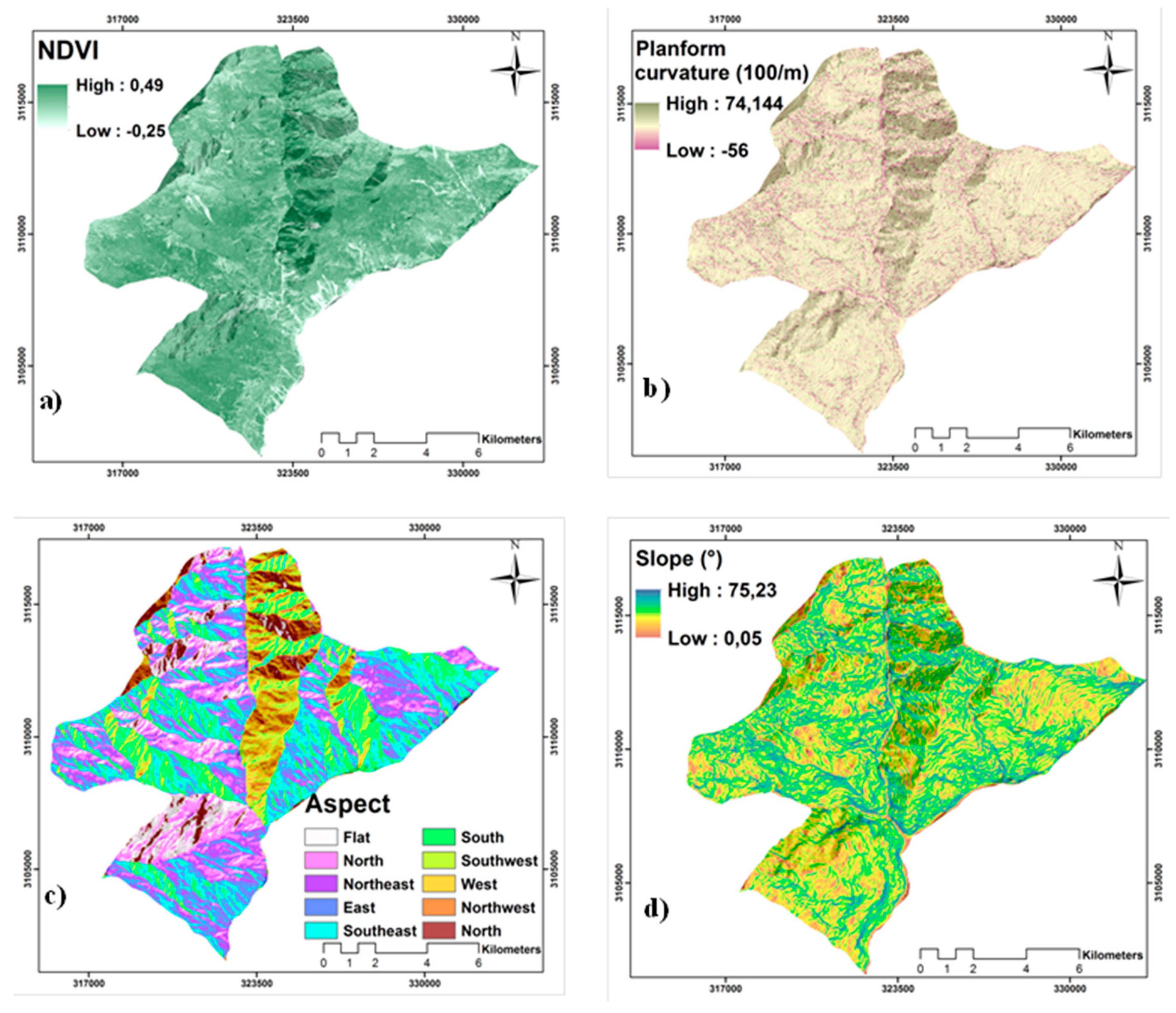
- Designing two different training data sets, a) spectral information only, and b) a data set containing both spectral information and topographic factors.
- Applying ANN, SVM and RF methods for landslide detection based on both training data sets and validating the performance for the study area.
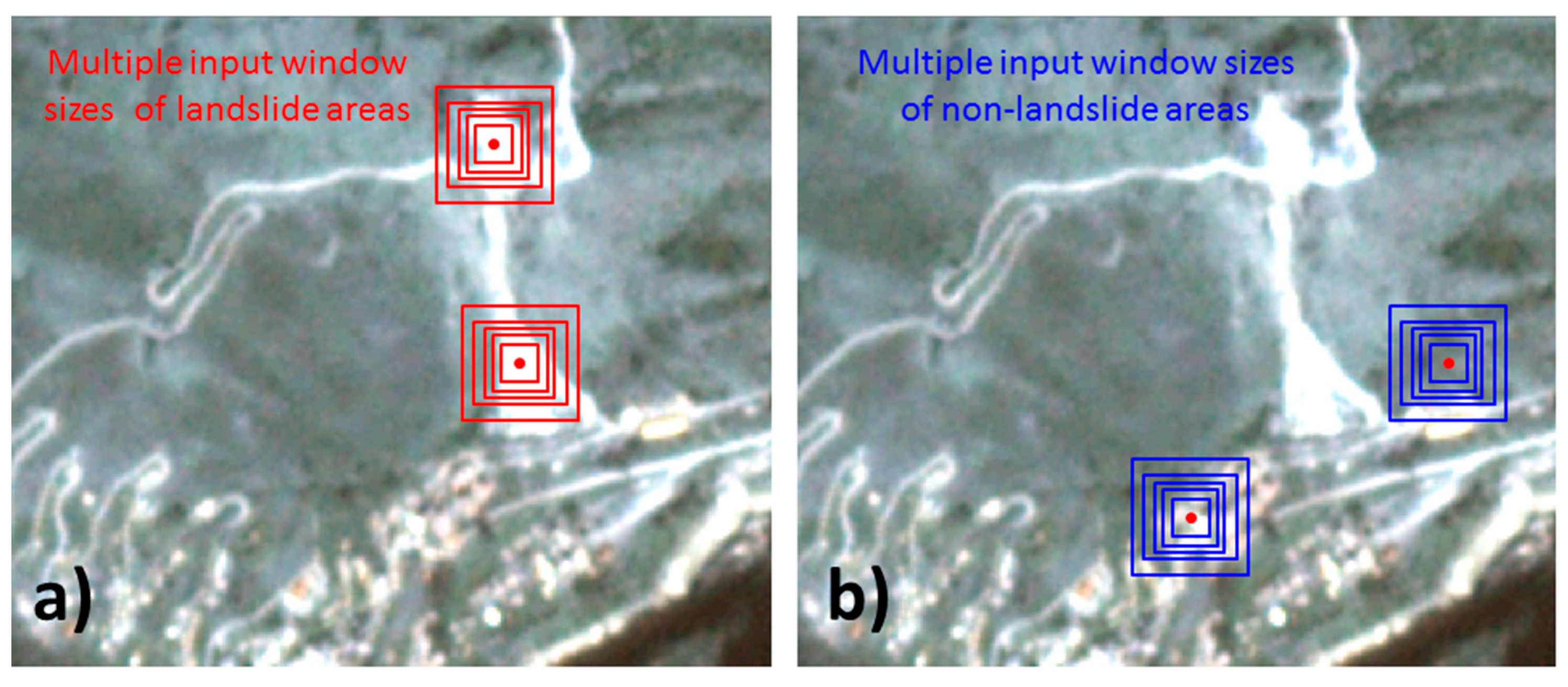
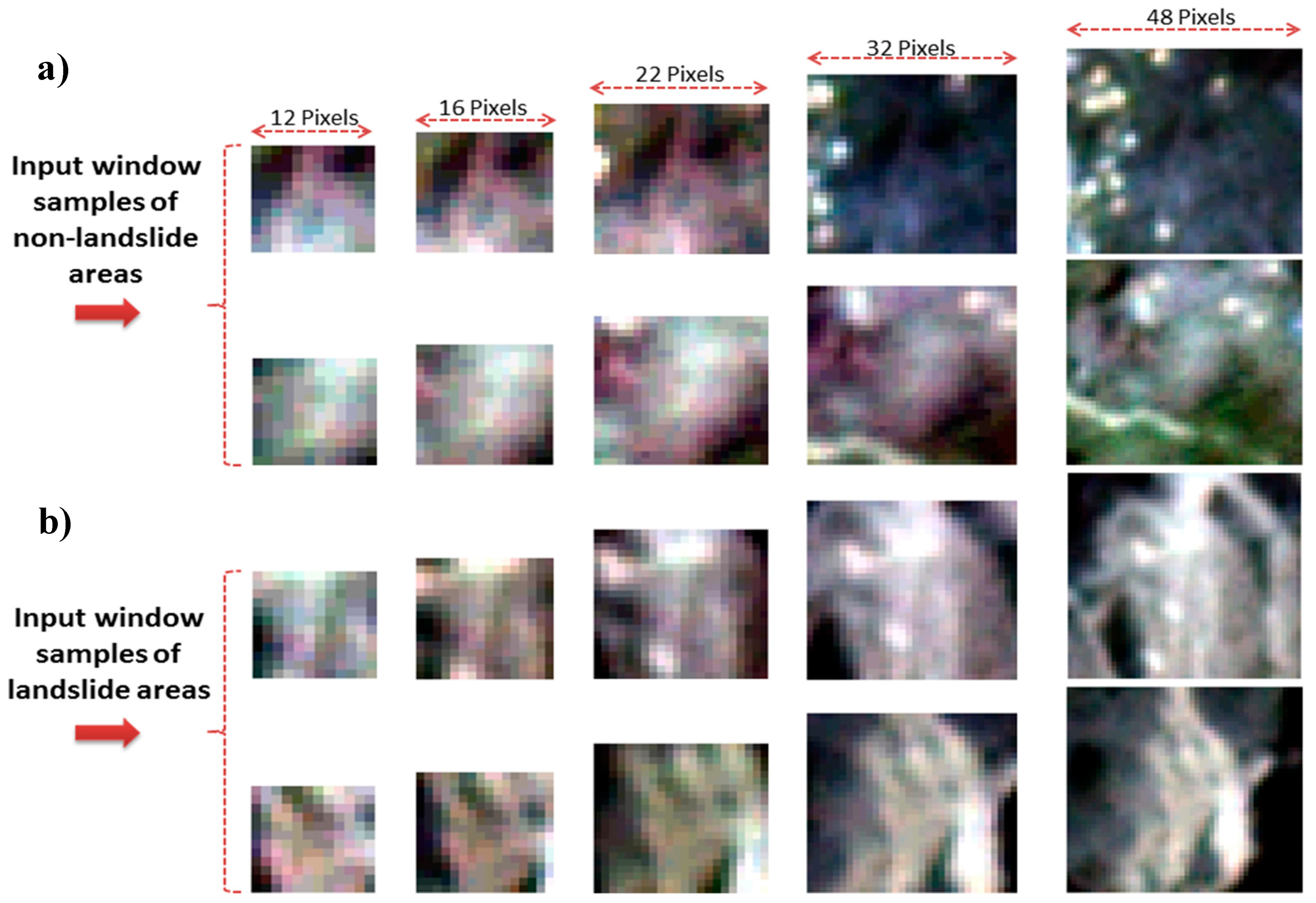
- Generating CNN-based patches by considering multiple window sizes from small to large ones.
- Developing a data augmentation approach for increasing the number of training data sets used for CNNs.
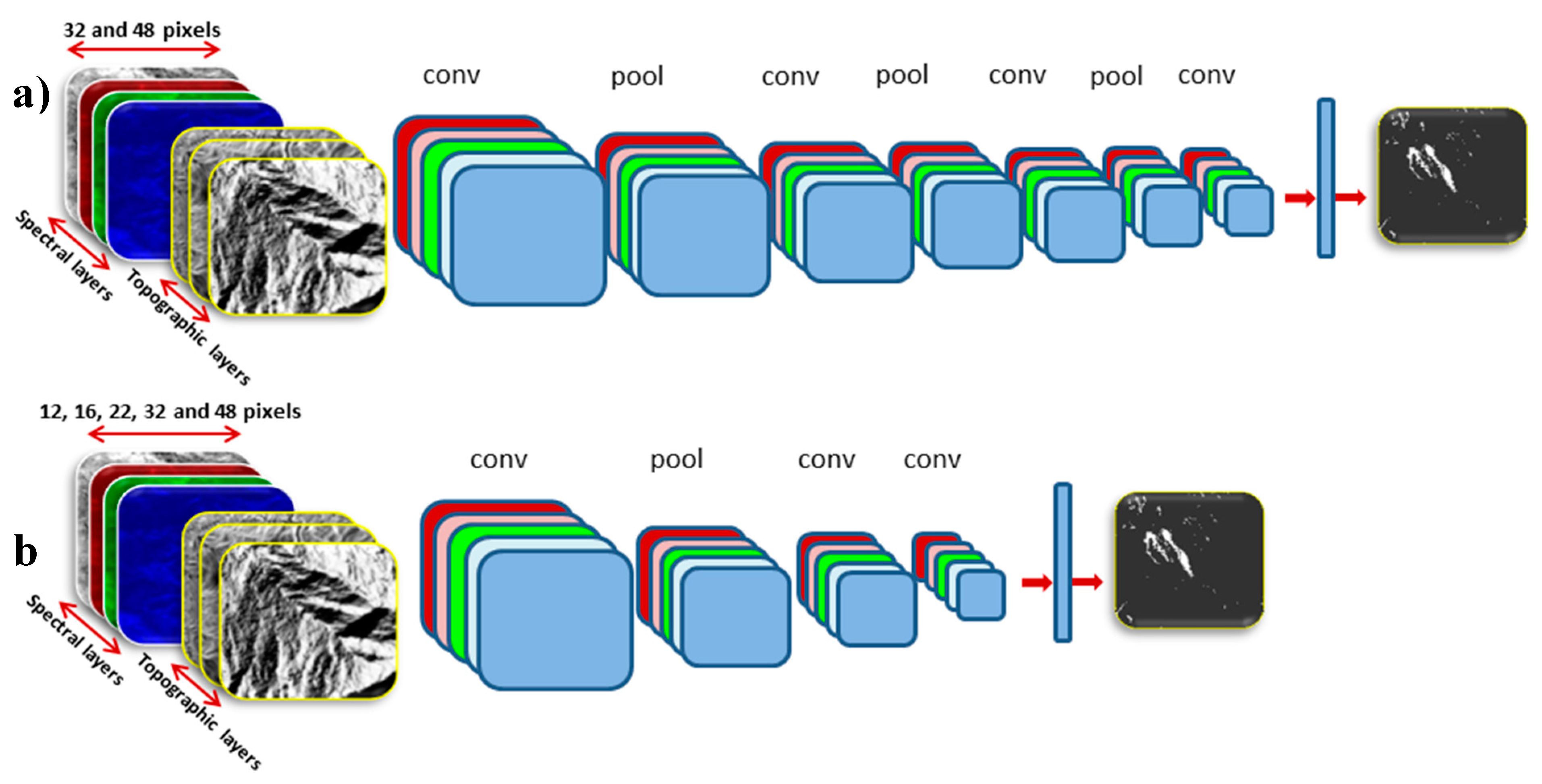
- Structuring CNNs with different layer depths in regard to the range of input window size CNN patches to determine the most efficient CNN setting.
- Testing and validating the performances of each method by using multiple parameters.
3.2. Data
3.3. Random Forest (RF)
3.4. Support Vector Machines (SVM)
3.5. Artificial Neural Network (ANN)
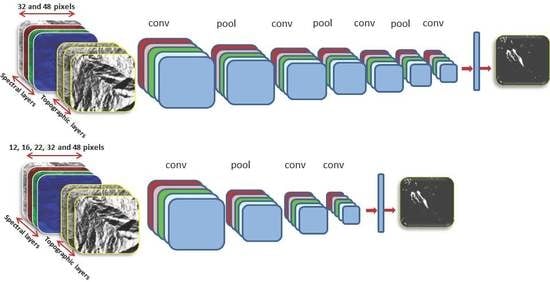
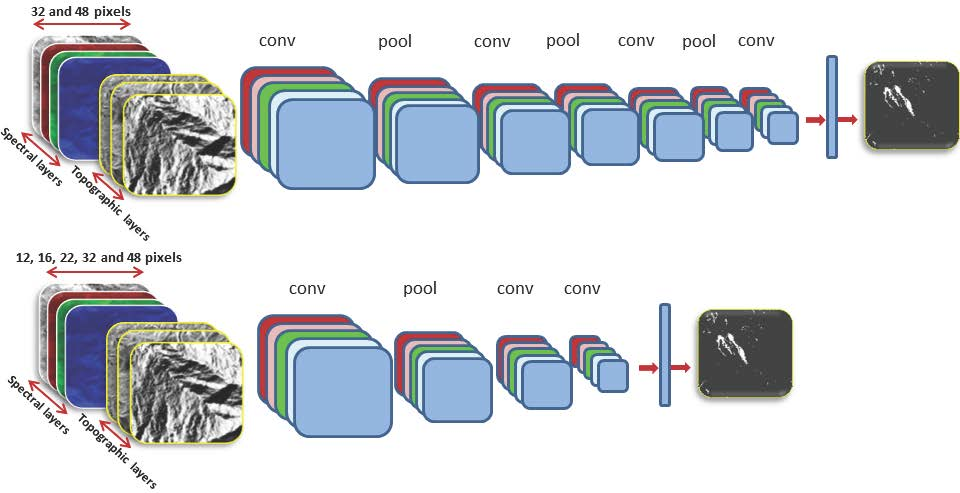
3.6. Convolution Neural Network (CNN)
3.6.1. Multiple Input Window Size CNNs
3.6.2. Augmentation of the Training Data Set
3.6.3. Different Layer Depth CNNs
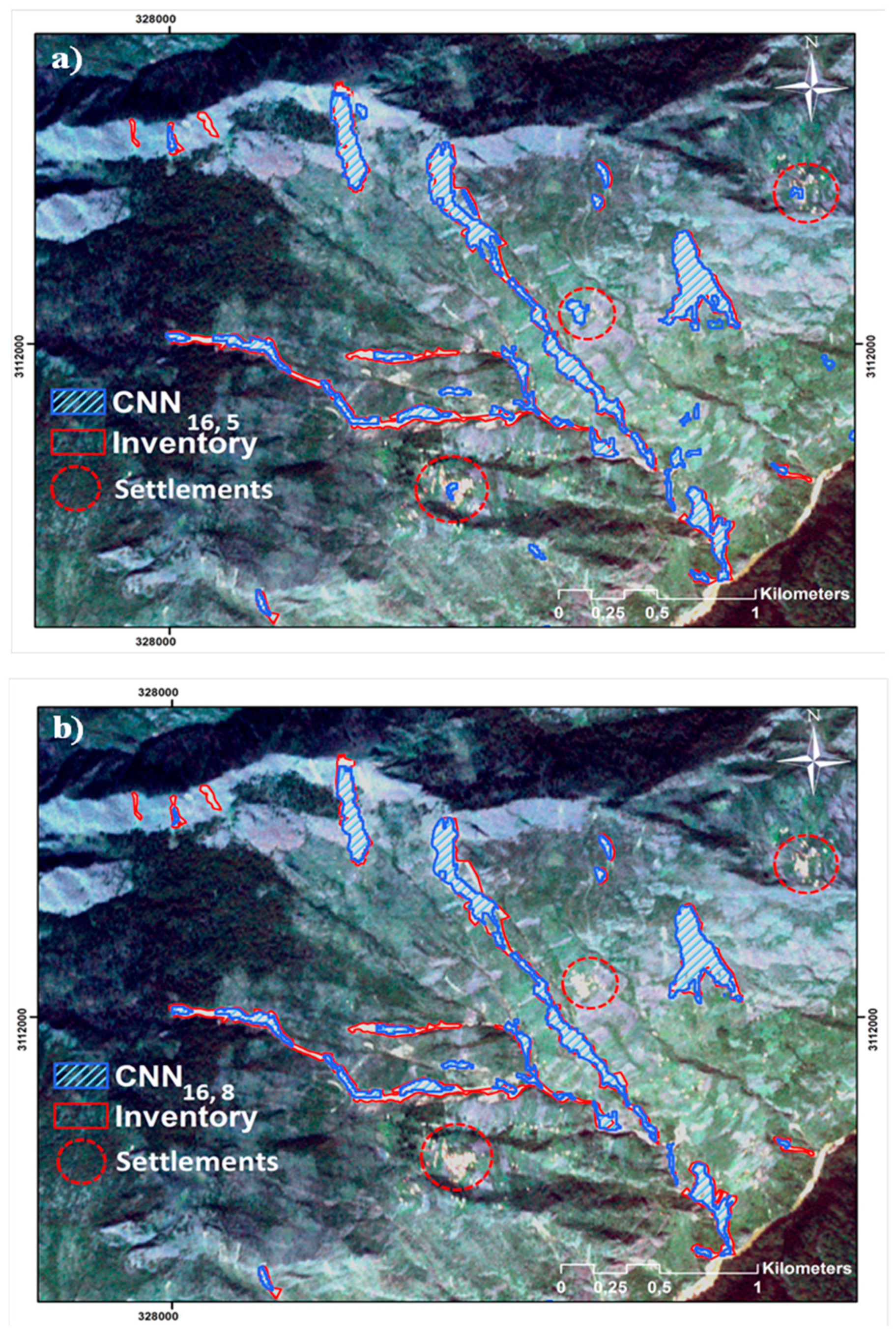
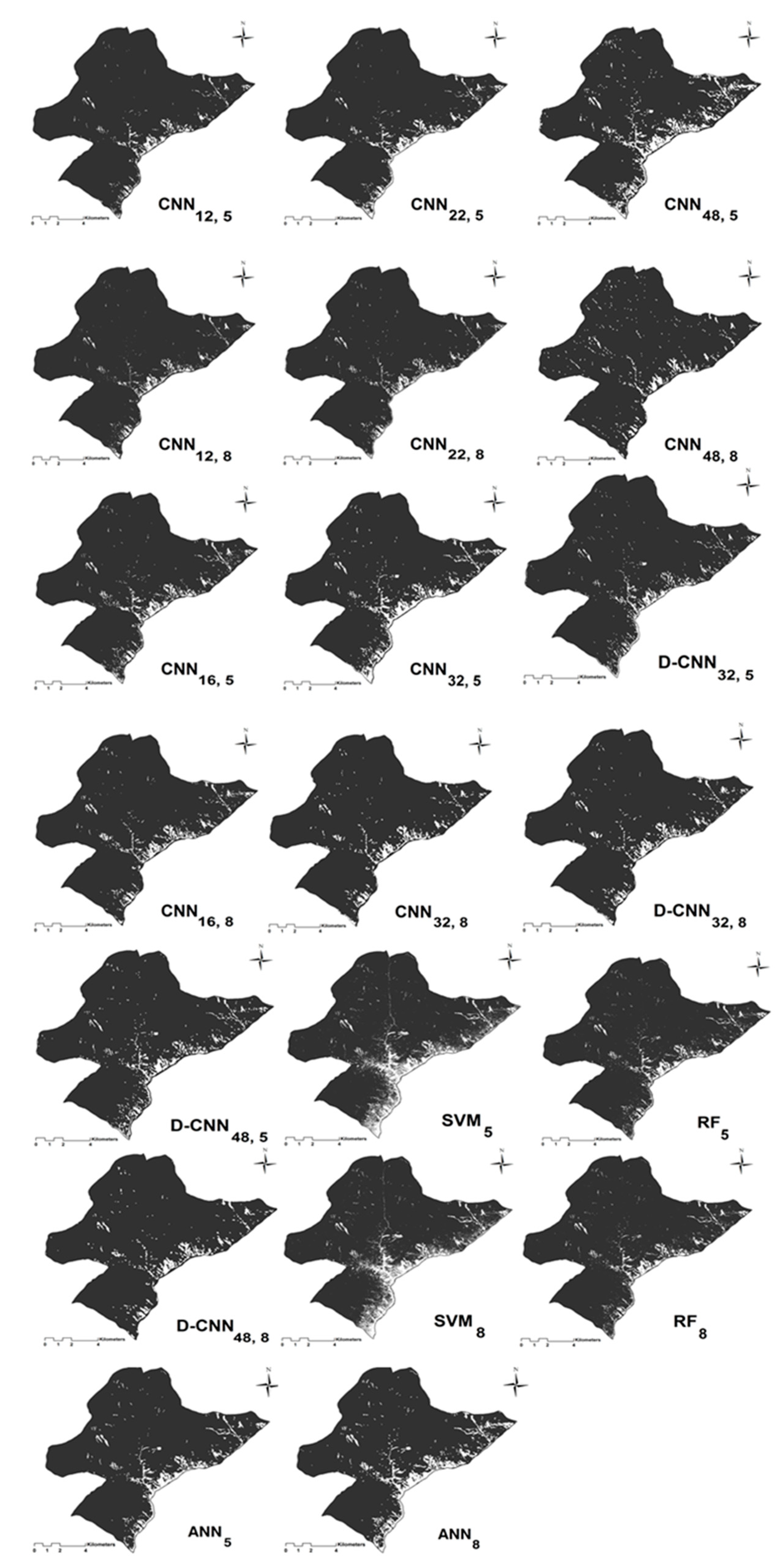
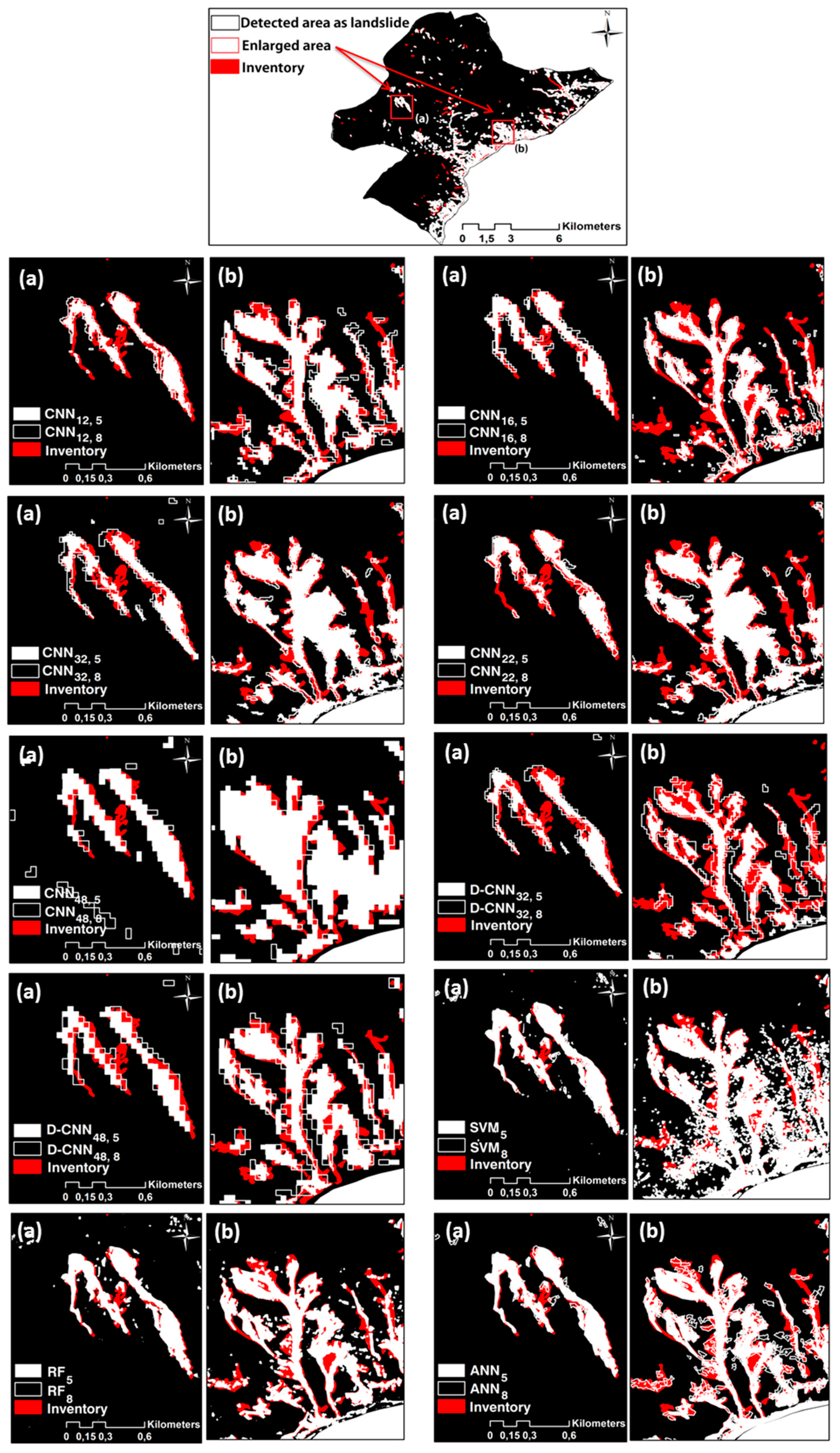
4. Results
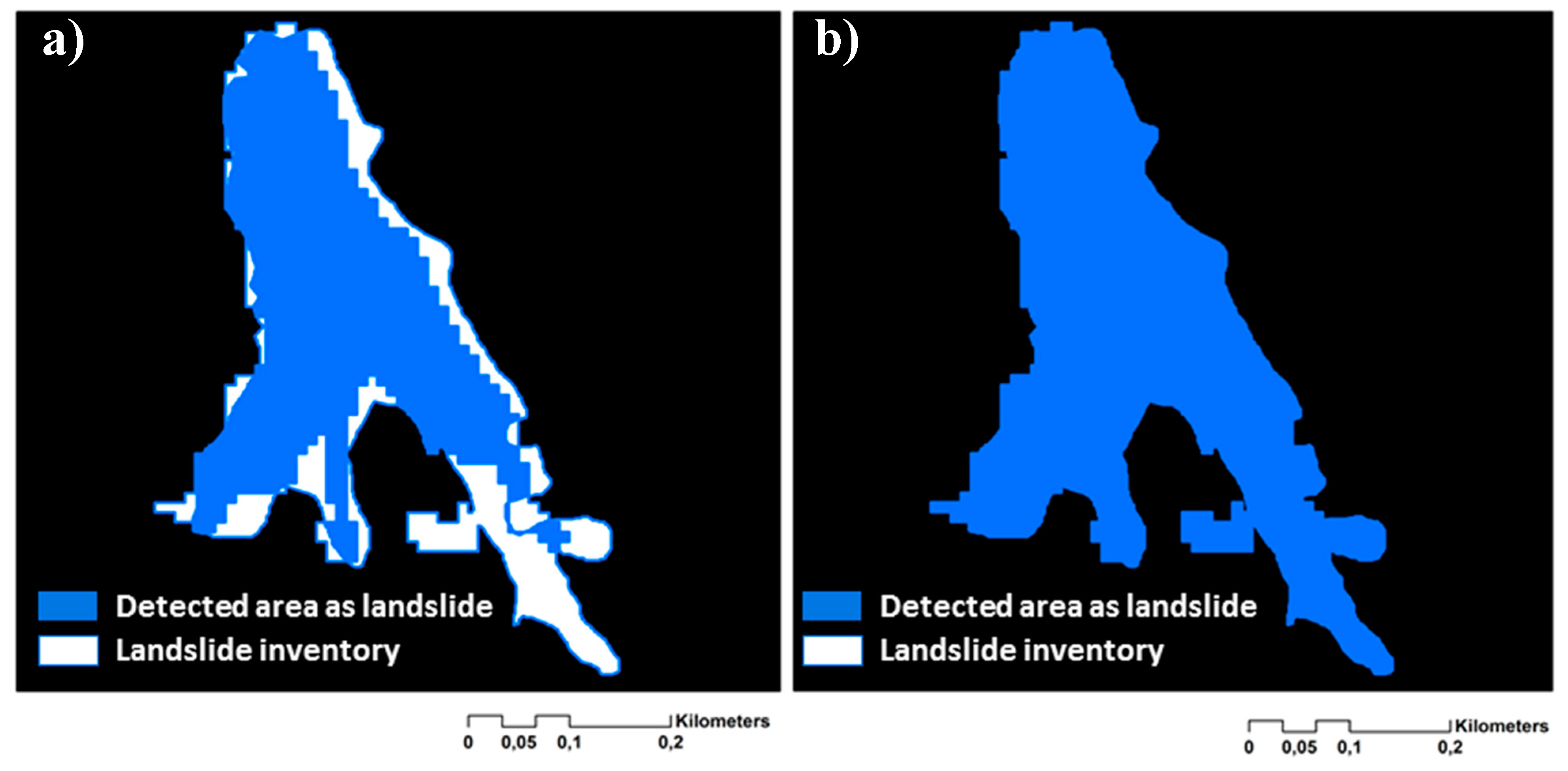
5. Accuracy Assessment
5.1. Quantitative Methods
5.2. Mean Intersection-over-Union (mIOU)
6. Discussion
7. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Pourghasemi, H.; Gayen, A.; Park, S.; Lee, C.-W.; Lee, S. Assessment of landslide-prone areas and their zonation using logistic regression, logitboost, and naïvebayes machine-learning algorithms. Sustainability 2018, 10, 3697. [Google Scholar] [CrossRef]
- Hölbling, D.; Füreder, P.; Antolini, F.; Cigna, F.; Casagli, N.; Lang, S. A semi-automated object-based approach for landslide detection validated by persistent scatterer interferometry measures and landslide inventories. Remote Sens. 2012, 4, 1310–1336. [Google Scholar] [CrossRef]
- Hong, H.; Chen, W.; Xu, C.; Youssef, A.M.; Pradhan, B.; Tien Bui, D. Rainfall-induced landslide susceptibility assessment at the Chongren area (China) using frequency ratio, certainty factor, and index of entropy. Geocarto Int. 2017, 32, 139–154. [Google Scholar] [CrossRef]
- Pradhan, B. A comparative study on the predictive ability of the decision tree, support vector machine and neuro-fuzzy models in landslide susceptibility mapping using GIS. Comput. Geosci. 2013, 51, 350–365. [Google Scholar] [CrossRef] [Green Version]
- Solway, L. Socio-economic perspective of developing country megacities vulnerable to flood and landslide hazards. In Floods and Landslides: Integrated Risk Assessment; Springer: Berlin, Heidelberg, 1999; pp. 245–260. [Google Scholar]
- Svalova, V. Landslide risk management for urbanized territories. In Risk Management Treatise for Engineering Practitioners; Oduoza, C.F., Ed.; IntechOpen: London, UK, 2018. [Google Scholar]
- Cascini, L.; Bonnard, C.; Corominas, J.; Jibson, R.; Montero-Olarte, J. Landslide hazard and risk zoning for urban planning and development. In Landslide Risk Management; Hungr, O., Fell, R., Couture, R., Eberhardt, E., Eds.; Taylor & Francis: London, UK, 2005; pp. 199–235. [Google Scholar]
- Martire, D.; De Rosa, M.; Pesce, V.; Santangelo, M.A.; Calcaterra, D. Landslide hazard and land management in high-density urban areas of Campania region, Italy. Nat. Hazards Earth Syst. Sci. 2012, 12, 905–926. [Google Scholar] [CrossRef] [Green Version]
- Mezaal, M.; Pradhan, B.; Rizeei, H. Improving landslide detection from airborne laser scanning data using optimized Dempster–Shafer. Remote Sens. 2018, 10, 1029. [Google Scholar] [CrossRef]
- Feizizadeh, B.; Ghorbanzadeh, O. GIS-based interval pairwise comparison matrices as a novel approach for optimizing an analytical hierarchy process and multiple criteria weighting. GI_Forum 2017, 1, 27–35. [Google Scholar] [CrossRef]
- Myronidis, D.; Papageorgiou, C.; Theophanous, S. Landslide susceptibility mapping based on landslide history and analytic hierarchy process (AHP). Nat. Hazards 2016, 81, 245–263. [Google Scholar] [CrossRef]
- Aghdam, I.N.; Varzandeh, M.H.M.; Pradhan, B. Landslide susceptibility mapping using an ensemble statistical index (wi) and adaptive neuro-fuzzy inference system (ANFIS) model at Alborz mountains (Iran). Environ. Earth Sci. 2016, 75, 553. [Google Scholar] [CrossRef]
- Sezer, E.A.; Pradhan, B.; Gokceoglu, C. Manifestation of an adaptive neuro-fuzzy model on landslide susceptibility mapping: Klang valley, Malaysia. Expert Syst. Appl. 2011, 38, 8208–8219. [Google Scholar] [CrossRef]
- Pourghasemi, H.R.; Kerle, N. Random forests and evidential belief function-based landslide susceptibility assessment in western Mazandaran province, Iran. Environ. Earth Sci. 2016, 75, 185. [Google Scholar] [CrossRef]
- Chen, W.; Xie, X.; Wang, J.; Pradhan, B.; Hong, H.; Bui, D.T.; Duan, Z.; Ma, J. A comparative study of logistic model tree, random forest, and classification and regression tree models for spatial prediction of landslide susceptibility. Catena 2017, 151, 147–160. [Google Scholar] [CrossRef]
- Ghorbanzadeh, O.; Blaschke, T.; Aryal, J.; Gholaminia, K. A new GIS-based technique using an adaptive neuro-fuzzy inference system for land subsidence susceptibility mapping. J. Spat. Sci. 2018, 1–17. [Google Scholar] [CrossRef]
- Ghorbanzadeh, O.; Rostamzadeh, H.; Blaschke, T.; Gholaminia, K.; Aryal, J. A new GIS-based data mining technique using an adaptive neuro-fuzzy inference system (ANFIS) and k-fold cross-validation approach for land subsidence susceptibility mapping. Nat. Hazards 2018, 1–21. [Google Scholar] [CrossRef]
- Feizizadeh, B.; Roodposhti, M.S.; Jankowski, P.; Blaschke, T. A GIS-based extended fuzzy multi-criteria evaluation for landslide susceptibility mapping. Comput. Geosci. 2014, 73, 208–221. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Voigt, S.; Kemper, T.; Riedlinger, T.; Kiefl, R.; Scholte, K.; Mehl, H. Satellite image analysis for disaster and crisis-management support. IEEE Trans. Geosci. Remote Sens. 2007, 45, 1520–1528. [Google Scholar] [CrossRef]
- Plank, S.; Twele, A.; Martinis, S. Landslide mapping in vegetated areas using change detection based on optical and polarimetric SAR data. Remote Sens. 2016, 8, 307. [Google Scholar] [CrossRef]
- Guzzetti, F.; Mondini, A.C.; Cardinali, M.; Fiorucci, F.; Santangelo, M.; Chang, K.-T. Landslide inventory maps: New tools for an old problem. Earth-Sci. Rev. 2012, 112, 42–66. [Google Scholar] [CrossRef] [Green Version]
- Manconi, A.; Casu, F.; Ardizzone, F.; Bonano, M.; Cardinali, M.; De Luca, C.; Gueguen, E.; Marchesini, I.; Parise, M.; Vennari, C. Brief communication: Rapid mapping of landslide events: The 3 December 2013 Montescaglioso landslide, Italy. Nat. Hazards Earth Syst. Sci. 2014, 14, 1835–1841. [Google Scholar] [CrossRef]
- Lang, S.; Schöpfer, E.; Zeil, P.; Riedler, B. Earth observation for humanitarian assistance. GI Forum–J. Geogr. Inf. Sci. 2017, 1, 157–165. [Google Scholar] [CrossRef]
- Blaschke, T. Object based image analysis for remote sensing. ISPRS J. Photogramm. Remote Sens. 2010, 65, 2–16. [Google Scholar] [CrossRef] [Green Version]
- Duro, D.C.; Franklin, S.E.; Dubé, M.G. A comparison of pixel-based and object-based image analysis with selected machine learning algorithms for the classification of agricultural landscapes using Spot-5 HRG imagery. Remote Sens. Environ. 2012, 118, 259–272. [Google Scholar] [CrossRef]
- Roodposhti, M.S.; Aryal, J.; Bryan, B.A. A novel algorithm for calculating transition potential in cellular automata models of land-use/cover change. Environ. Model. Softw. 2019, 112, 70–81. [Google Scholar] [CrossRef]
- Mezaal, M.R.; Pradhan, B.; Sameen, M.I.; Mohd Shafri, H.Z.; Yusoff, Z.M. Optimized neural architecture for automatic landslide detection from high-resolution airborne laser scanning data. Appl. Sci. 2017, 7, 730. [Google Scholar] [CrossRef]
- Danneels, G.; Pirard, E.; Havenith, H.-B. Automatic landslide detection from remote sensing images using supervised classification methods. In Proceedings of the IEEE International Geoscience and Remote Sensing Symposium, IGARSS 2007, Barcelona, Spain, 23–28 July 2007; IEEE: Barcelona, Spain, 2007; pp. 3014–3017. [Google Scholar]
- Bui, D.T.; Tuan, T.A.; Klempe, H.; Pradhan, B.; Revhaug, I. Spatial prediction models for shallow landslide hazards: A comparative assessment of the efficacy of support vector machines, artificial neural networks, kernel logistic regression, and logistic model tree. Landslides 2016, 13, 361–378. [Google Scholar]
- Zhu, X.X.; Tuia, D.; Mou, L.; Xia, G.-S.; Zhang, L.; Xu, F.; Fraundorfer, F. Deep learning in remote sensing: A comprehensive review and list of resources. IEEE Geosci. Remote Sens. Mag. 2017, 5, 8–36. [Google Scholar] [CrossRef]
- Ghorbanzadeh, O.; Tiede, D.; Dabiri, Z.; Sudmanns, M.; Lang, S. Dwelling extraction in refugee camps using CNN—First experiences and lessons learnt. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2018, 161–166. [Google Scholar] [CrossRef]
- Längkvist, M.; Kiselev, A.; Alirezaie, M.; Loutfi, A. Classification and segmentation of satellite orthoimagery using convolutional neural networks. Remote Sens. 2016, 8, 329. [Google Scholar] [CrossRef]
- Maggiori, E.; Tarabalka, Y.; Charpiat, G.; Alliez, P. Convolutional neural networks for large-scale remote-sensing image classification. IEEE Trans. Geosci. Remote Sens. 2017, 55, 645–657. [Google Scholar] [CrossRef]
- Long, J.; Shelhamer, E.; Darrell, T. Fully convolutional networks for semantic segmentation. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Boston, MA, USA, 7–12 June 2015; pp. 3431–3440. [Google Scholar]
- Qayyum, A.; Malik, A.S.; Saad, N.M.; Iqbal, M.; Faris Abdullah, M.; Rasheed, W.; Rashid Abdullah, T.A.; Bin Jafaar, M.Y. Scene classification for aerial images based on CNN using sparse coding technique. Int. J. Remote Sens. 2017, 38, 2662–2685. [Google Scholar] [CrossRef]
- Radovic, M.; Adarkwa, O.; Wang, Q. Object recognition in aerial images using convolutional neural networks. J. Imaging 2017, 3, 21. [Google Scholar] [CrossRef]
- Deng, Z.; Sun, H.; Zhou, S.; Zhao, J.; Lei, L.; Zou, H. Fast multiclass object detection in optical remote sensing images using region based convolutional neural networks. In Proceedings of the 2017 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Fort Worth, TX, USA, 23–28 July 2017; pp. 858–861. [Google Scholar]
- Dahmane, M.; Foucher, S.; Beaulieu, M.; Riendeau, F.; Bouroubi, Y.; Benoit, M. Object detection in pleiades images using deep features. In Proceedings of the 2016 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Beijing, China, 10–15 July 2016; pp. 1552–1555. [Google Scholar]
- Längkvist, M.; Alirezaie, M.; Kiselev, A.; Loutfi, A. Interactive learning with convolutional neural networks for image labeling. In Proceedings of the International Joint Conference on Artificial Intelligence (IJCAI), New York, NY, USA, 9–15 July 2016. [Google Scholar]
- Yang, H.L.; Lunga, D.; Yuan, J. Toward country scale building detection with convolutional neural network using aerial images. In Proceedings of the 2017 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Fort Worth, TX, USA, 23–28 July 2017; pp. 870–873. [Google Scholar]
- Guirado, E.; Tabik, S.; Alcaraz-Segura, D.; Cabello, J.; Herrera, F. Deep-learning convolutional neural networks for scattered shrub detection with google earth imagery. arXiv, 2017; arXiv:1706.00917. [Google Scholar]
- Yu, H.; Ma, Y.; Wang, L.; Zhai, Y.; Wang, X. A landslide intelligent detection method based on CNN and rsg_r. In Proceedings of the 2017 IEEE International Conference on Mechatronics and Automation (ICMA), Takamatsu, Japan, 6–9 August 2017; IEEE: Takamatsu, Japan, 2017; pp. 40–44. [Google Scholar]
- Ding, A.; Zhang, Q.; Zhou, X.; Dai, B. Automatic recognition of landslide based on CNN and texture change detection. In Proceedings of the Chinese Association of Automation (YAC), Youth Academic Annual Conference, Wuhan, China, 11–13 November 2016; IEEE: Wuhan, China, 2016; pp. 444–448. [Google Scholar]
- Roback, K.; Clark, M.K.; West, A.J.; Zekkos, D.; Li, G.; Gallen, S.F.; Chamlagain, D.; Godt, J.W. The size, distribution, and mobility of landslides caused by the 2015 Gorkha earthquake, Nepal. Geomorphology 2018, 301, 121–138. [Google Scholar] [CrossRef]
- Regmi, A.D.; Dhital, M.R.; Zhang, J.-Q.; Su, L.-J.; Chen, X.-Q. Landslide susceptibility assessment of the region affected by the 25 April 2015 Gorkha earthquake of Nepal. J. Mt. Sci. 2016, 13, 1941–1957. [Google Scholar] [CrossRef]
- Gnyawali, K.R.; Adhikari, B.R. Spatial relations of earthquake induced landslides triggered by 25 April 2015 Gorkha earthquake, mw 7.8, Nepal. In Proceedings of the EGU General Assembly, Vienna, Austria, 17–22 April 2016; p. 18429. [Google Scholar]
- Mahdianpari, M.; Salehi, B.; Rezaee, M.; Mohammadimanesh, F.; Zhang, Y. Very deep convolutional neural networks for complex land cover mapping using multispectral remote sensing imagery. Remote Sens. 2018, 10, 1119. [Google Scholar] [CrossRef]
- Modzelewska, A.; Stereńczak, K.; Mierczyk, M.; Maciuk, S.; Bałazy, R.; Zawiła-Niedźwiecki, T. Sensitivity of vegetation indices in relation to parameters of Norway spruce stands. Folia Forestalia Polonica 2017, 59, 85–98. [Google Scholar] [CrossRef] [Green Version]
- Ohlmacher, G.C. Plan curvature and landslide probability in regions dominated by earth flows and earth slides. Eng. Geol. 2007, 91, 117–134. [Google Scholar] [CrossRef]
- Breiman, L. Random forests. Mach. Learn. 2001, 45, 5–32. [Google Scholar] [CrossRef]
- Melville, B.; Lucieer, A.; Aryal, J. Object-based random forest classification of Landsat ETM+ and worldview-2 satellite imagery for mapping lowland native grassland communities in Tasmania, Australia. Int. J. Appl. Earth Obs. Geoinf. 2018, 66, 46–55. [Google Scholar] [CrossRef]
- Xu, R.; Lin, H.; Lü, Y.; Luo, Y.; Ren, Y.; Comber, A. A modified change vector approach for quantifying land cover change. Remote Sens. 2018, 10, 1578. [Google Scholar] [CrossRef]
- Chen, T.; Trinder, J.C.; Niu, R. Object-oriented landslide mapping using ZY-3 satellite imagery, random forest and mathematical morphology, for the three-gorges reservoir, china. Remote Sens. 2017, 9, 333. [Google Scholar] [CrossRef]
- Vapnik, V. Statistical Learning Theory; Wiley: New York, NY, USA, 1998; Volume 3. [Google Scholar]
- Janik, P.; Lobos, T. Automated classification of power-quality disturbances using SVM and RBF networks. IEEE Trans. Power Deliv. 2006, 21, 1663–1669. [Google Scholar] [CrossRef]
- Goldarag, Y.J.; Mohammadzadeh, A.; Ardakani, A. Fire risk assessment using neural network and logistic regression. J. Indian Soc. Remote Sens. 2016, 44, 885–894. [Google Scholar] [CrossRef]
- Paola, J.; Schowengerdt, R. A review and analysis of backpropagation neural networks for classification of remotely-sensed multi-spectral imagery. Int. J. Remote Sens. 1995, 16, 3033–3058. [Google Scholar] [CrossRef]
- Park, S.; Choi, C.; Kim, B.; Kim, J. Landslide susceptibility mapping using frequency ratio, analytic hierarchy process, logistic regression, and artificial neural network methods at the Inje area, Korea. Environ. Earth Sci. 2013, 68, 1443–1464. [Google Scholar] [CrossRef]
- Zhang, C.; Sargent, I.; Pan, X.; Li, H.; Gardiner, A.; Hare, J.; Atkinson, P.M. An object-based convolutional neural network (OCNN) for urban land use classification. Remote Sens. Environ. 2018, 216, 57–70. [Google Scholar] [CrossRef]
- Strigl, D.; Kofler, K.; Podlipnig, S. Performance and scalability of GPU-based convolutional neural networks. In Proceedings of the 2010 18th Euromicro International Conference on Parallel, Distributed and Network-Based Processing (PDP), Pisa, Italy, 17–19 February 2010; IEEE: Pisa, Italy, 2010; pp. 317–324. [Google Scholar]
- Dixit, M.; Kwitt, R.; Niethammer, M.; Vasconcelos, N. Attribute-guided augmentation. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, HI, USA, 21–26 July 2017; pp. 7455–7463. [Google Scholar]
- Liu, B.; Dixit, M.; Kwitt, R.; Vasconcelos, N. Feature space transfer for data augmentation. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Salt Lake City, UT, USA, 18–20 June 2018; pp. 9090–9098. [Google Scholar]
- Csillik, O.; Cherbini, J.; Johnson, R.; Lyons, A.; Kelly, M. Identification of citrus trees from unmanned aerial vehicle imagery using convolutional neural networks. Drones 2018, 2, 39. [Google Scholar] [CrossRef]
- Chen, L.-C.; Barron, J.T.; Papandreou, G.; Murphy, K.; Yuille, A.L. Semantic image segmentation with task-specific edge detection using cnns and a discriminatively trained domain transform. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Las Vegas, NV, USA, 26 June–1 July 2016; pp. 4545–4554. [Google Scholar]
- Dou, J.; Chang, K.-T.; Chen, S.; Yunus, A.P.; Liu, J.-K.; Xia, H.; Zhu, Z. Automatic case-based reasoning approach for landslide detection: Integration of object-oriented image analysis and a genetic algorithm. Remote Sens. 2015, 7, 4318–4342. [Google Scholar] [CrossRef]
- Blaschke, T.; Piralilou, S.T. The near-decomposability paradigm re-interpreted for place-based GIS. In Proceedings of the 1st Workshop on Platial Analysis (PLATIAL’18), Heidelberg, Germany, 20–21 September 2018; pp. 20–21. [Google Scholar]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Prepared by | # Landslides | Shape | Coverage | Study Reference |
|---|---|---|---|---|
| USGS | 24915 | Polygon | Gorkha, Nepal | [44] |
| IMHE, CAS | 2645 | Polygon | Gorkha, Nepal | [45] |
| Gnyawali and Adhikari 2016 | 19332 | Point | Gorkha, Nepal | [46] |
| Method | Count | Minimum (ha) | Maximum (ha) | Sum (ha) | Mean (ha) | Standard Deviation (ha) |
|---|---|---|---|---|---|---|
| 247 | 0.175 | 77.16 | 555,63 | 1.54 | 5.37 | |
| 308 | 0.2 | 54.65 | 530,63 | 1.99 | 6.51 | |
| 281 | 0.175 | 96.32 | 480,52 | 1.15 | 4.97 | |
| 321 | 0.18 | 157.64 | 447,28 | 1.65 | 7.08 | |
| 286 | 0.175 | 136.85 | 524,32 | 1.89 | 9.75 | |
| 341 | 0.185 | 170.05 | 426,05 | 0.96 | 4.59 | |
| 306 | 0.21 | 208.48 | 784,79 | 1.93 | 11.08 | |
| 335 | 0.205 | 174.4 | 508,31 | 2.16 | 6.43 | |
| 314 | 0.2 | 204.8 | 426,83 | 2.37 | 11.23 | |
| 385 | 0.22 | 154.72 | 478,02 | 1.1 | 3.46 | |
| D- | 268 | 0.195 | 58.87 | 467,52 | 1.27 | 4.28 |
| D- | 277 | 0.2 | 76 | 509,83 | 1.84 | 6.45 |
| D- | 306 | 0.22 | 65.6 | 589,93 | 1.49 | 4.39 |
| D- | 319 | 0.22 | 74.08 | 505,43 | 2.3 | 6.59 |
| 421 | 0.175 | 322.16 | 754,85 | 2.24 | 14.31 | |
| 514 | 0.175 | 352.09 | 798,72 | 1.69 | 15.77 | |
| 333 | 0.175 | 117.9 | 565,93 | 1.47 | 7.29 | |
| 459 | 0.18 | 282.02 | 568,11 | 1.27 | 11.62 | |
| ANN5 | 489 | 0.175 | 117.95 | 991,98 | 1.05 | 4.64 |
| ANN8 | 546 | 0.175 | 153.95 | 1125,75 | 0.99 | 4.5 |
| Method | TP (ha) | FP (ha) | FN (ha) | Precision (%) | Recall (%) | F1 (%) | mIOU (%) |
|---|---|---|---|---|---|---|---|
| 368 | 113.23 | 74.4 | 76.47 | 83.18 | 79.68 | 66.23 | |
| 344.07 | 146.64 | 39.92 | 70.11 | 89.6 | 78.67 | 64.84 | |
| 397.8 | 59.63 | 23.09 | 83.31 | 92.8 | 87.8 | 78.26 | |
| 345.27 | 63.89 | 38.12 | 79.33 | 86.54 | 82.78 | 70.62 | |
| 351.02 | 145.89 | 27.41 | 70.51 | 92.85 | 79.94 | 66.8 | |
| 260.45 | 87.98 | 77.62 | 74.74 | 77.03 | 75.87 | 61.13 | |
| 325.24 | 380.03 | 79.52 | 53.88 | 82.69 | 65.25 | 48.42 | |
| 279.58 | 182.97 | 45.76 | 60.44 | 85.93 | 70.96 | 55 | |
| 210 | 110.27 | 106.56 | 66.02 | 67.95 | 66.97 | 50.35 | |
| 226.61 | 156.32 | 95.09 | 59.12 | 66.33 | 70.28 | 47.29 | |
| D- | 297.63 | 124.53 | 45.36 | 70.5 | 86.77 | 77.79 | 63.66 |
| D- | 301.08 | 162.31 | 46.44 | 64.97 | 86.63 | 74.25 | 59.05 |
| D- | 298.55 | 201.36 | 90.02 | 59.72 | 76.83 | 67.2 | 50.6 |
| D- | 273.14 | 194.69 | 37.6 | 58.38 | 87.9 | 70.56 | 54.04 |
| 385.9 | 318.28 | 50.67 | 54.8 | 88.39 | 67.65 | 51.12 | |
| 403.07 | 395.65 | 58. 47 | 50.51 | 87.38 | 64.01 | 47.07 | |
| 393.9 | 86.71 | 85.32 | 81.95 | 82.19 | 82.07 | 69.6 | |
| 380.2 | 89.6 | 98.31 | 80.9 | 79.45 | 80.17 | 66.9 | |
| ANN5 | 499,83 | 152,03 | 340,12 | 76,7 | 59, 53 | 67,03 | 50,41 |
| ANN8 | 445,9 | 459,81 | 220,04 | 49,22 | 66,95 | 56,73 | 39,6 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ghorbanzadeh, O.; Blaschke, T.; Gholamnia, K.; Meena, S.R.; Tiede, D.; Aryal, J. Evaluation of Different Machine Learning Methods and Deep-Learning Convolutional Neural Networks for Landslide Detection. Remote Sens. 2019, 11, 196. https://doi.org/10.3390/rs11020196
Ghorbanzadeh O, Blaschke T, Gholamnia K, Meena SR, Tiede D, Aryal J. Evaluation of Different Machine Learning Methods and Deep-Learning Convolutional Neural Networks for Landslide Detection. Remote Sensing. 2019; 11(2):196. https://doi.org/10.3390/rs11020196
Chicago/Turabian StyleGhorbanzadeh, Omid, Thomas Blaschke, Khalil Gholamnia, Sansar Raj Meena, Dirk Tiede, and Jagannath Aryal. 2019. "Evaluation of Different Machine Learning Methods and Deep-Learning Convolutional Neural Networks for Landslide Detection" Remote Sensing 11, no. 2: 196. https://doi.org/10.3390/rs11020196
APA StyleGhorbanzadeh, O., Blaschke, T., Gholamnia, K., Meena, S. R., Tiede, D., & Aryal, J. (2019). Evaluation of Different Machine Learning Methods and Deep-Learning Convolutional Neural Networks for Landslide Detection. Remote Sensing, 11(2), 196. https://doi.org/10.3390/rs11020196