Coral Reef Mapping of UAV: A Comparison of Sun Glint Correction Methods



Abstract
1. Introduction
2. Materials and Methods
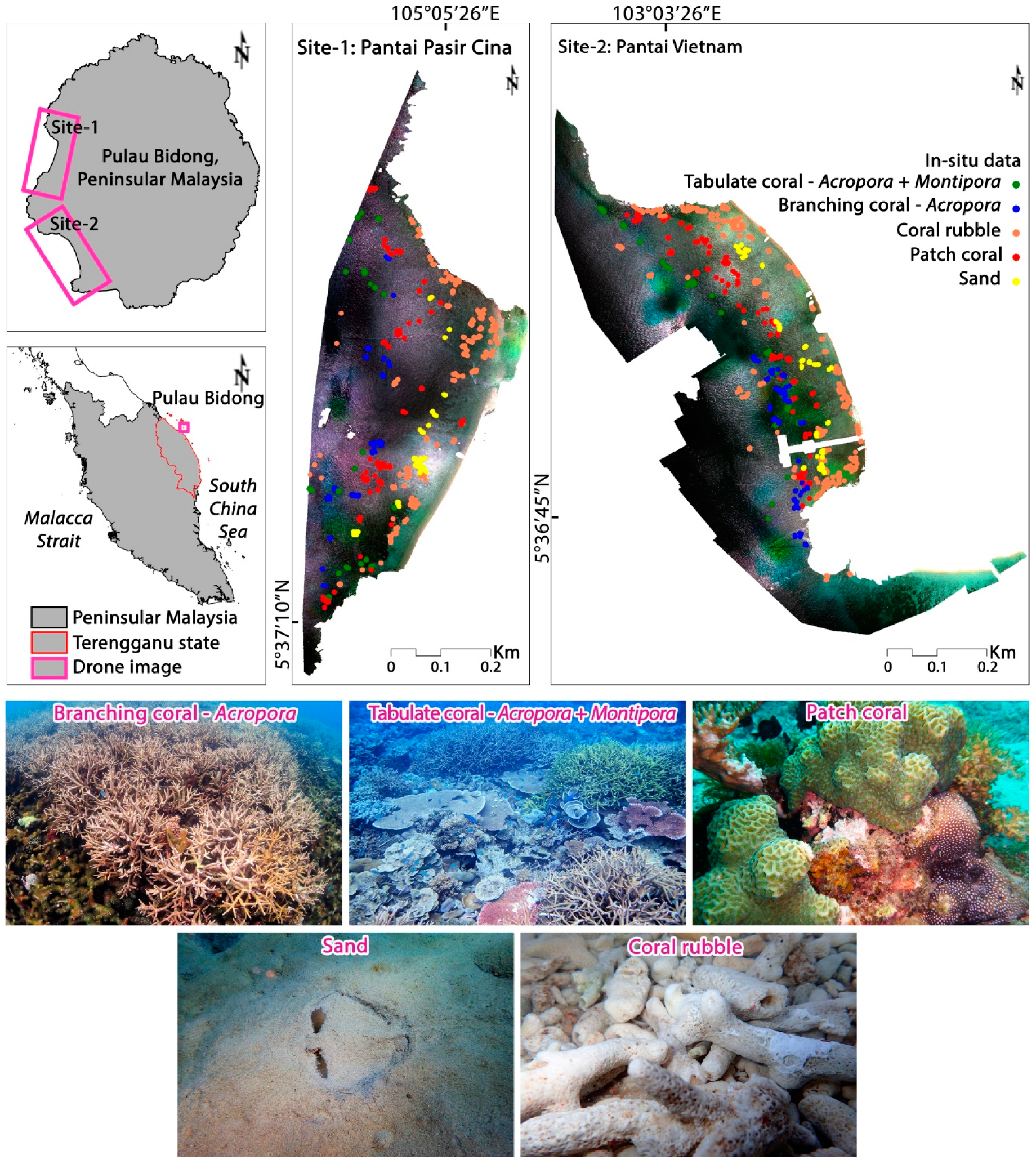
2.1. UAV Data: Acquisition and Processing
2.2. Glint Removal Procedures
2.3. Evaluation of Sun Glint Correction Methods
2.4. Coral Habitat Mapping
2.5. Validation of Sun Glint Correction Methods
3. Results
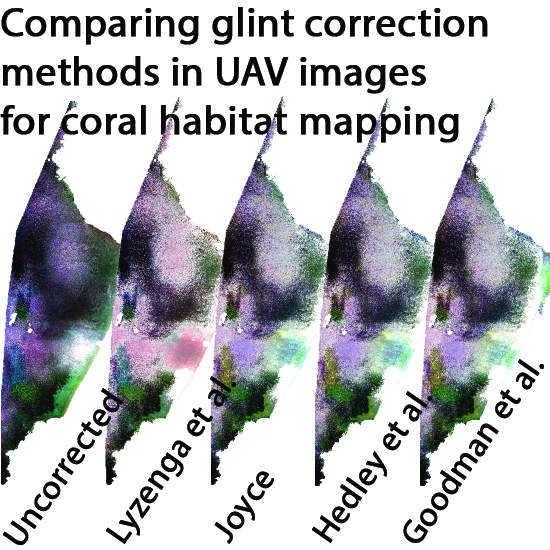
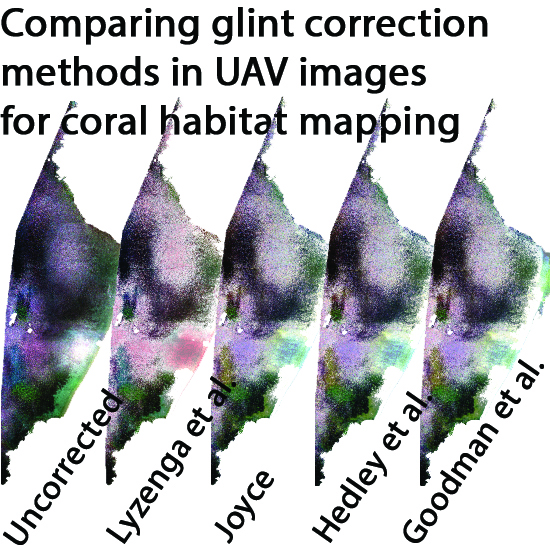
3.1. Comparison of Image Quality Based on Glint Correction Methods
3.2. Spectral Analysis Using UAV Data
3.3. Benthic Habitat Classification Performance
4. Discussion
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Hoegh-Guldberg, O.; Mumby, P.J.; Hooten, A.J.; Steneck, R.S.; Greenfield, P.; Gomez, E.; Harvell, C.D.; Sale, P.F.; Edwards, A.J.; Caldeira, K.; et al. Coral Reefs Under Rapid Climate Change and Ocean Acidification. Science (80-) 2007, 318, 1737–1742. [Google Scholar] [CrossRef] [PubMed]
- Bellwood, D.R.; Hughes, T.P.; Folke, C.; Nyström, M. Confronting the coral reef crisis. Nature 2004, 429, 827–833. [Google Scholar] [CrossRef] [PubMed]
- Hedley, J.D.; Roelfsema, C.M.; Chollett, I.; Harborne, A.R.; Heron, S.F.; Weeks, S.; Skirving, W.J.; Strong, A.E.; Eakin, C.M.; Christensen, T.R.L.; et al. Remote Sensing of Coral Reefs for Monitoring and Management: A Review. Remote Sens. 2016, 8, 118. [Google Scholar] [CrossRef]
- Xu, J.; Zhao, D. Review of coral reef ecosystem remote sensing. Acta Ecol. Sin. 2014, 34, 19–25. [Google Scholar] [CrossRef]
- Hossain, M.S.; Bujang, J.S.; Zakaria, M.H.; Hashim, M. Marine and human habitat mapping for the Coral Triangle Initiative region of Sabah using Landsat and Google Earth imagery. Mar. Policy 2016, 72. [Google Scholar] [CrossRef]
- Colomina, I.; Molina, P. Unmanned aerial systems for photogrammetry and remote sensing: A review. ISPRS J. Photogramm. Remote Sens. 2014, 92, 79–97. [Google Scholar] [CrossRef]
- Gonzalez-Aguilera, D.; Rodriguez-Gonzalvez, P. Drones-An Open Access Journal. Drones 2017, 1, 1. [Google Scholar] [CrossRef]
- Pajares, G. Overview and Current Status of Remote Sensing Applications Based on Unmanned Aerial Vehicles (UAVs). Photogramm. Eng. Remote Sens. 2015, 81, 281–329. [Google Scholar] [CrossRef]
- Hossain, M.S.; Muslim, A.M.; Nadzri, M.I.; Teruhisa, K.; David, D.; Khalil, I.; Mohamad, Z. Can Ensemble Techniques Improve Coral Reef Habitat Classification Accuracy Using Multispectral data? Geocarto Int. 2018, 1–37. [Google Scholar] [CrossRef]
- Zeng, C.; Richardson, M.; King, D.J. The impacts of environmental variables on water reflectance measured using a lightweight unmanned aerial vehicle (UAV)-based spectrometer system. ISPRS J. Photogramm. Remote Sens. 2017, 130, 217–230. [Google Scholar] [CrossRef]
- Parsons, M.; Bratanov, D.; Gaston, K.J.; Gonzalez, F. UAVs, Hyperspectral Remote Sensing, and Machine Learning Revolutionizing Reef Monitoring. Sensors (Basel) 2018, 18, 2026. [Google Scholar] [CrossRef] [PubMed]
- Collin, A.; Ramambason, C.; Pastol, Y.; Casella, E.; Rovere, A.; Thiault, L.; Espiau, B.; Siu, G.; Lerouvreur, F.; Nakamura, N.; et al. Very high resolution mapping of coral reef state using airborne bathymetric LiDAR surface-intensity and drone imagery. Int. J. Remote Sens. 2018, 39, 5676–5688. [Google Scholar] [CrossRef]
- Ortega-Terol, D.; Hernandez-Lopez, D.; Ballesteros, R.; Gonzalez-Aguilera, D. Automatic Hotspot and Sun Glint Detection in UAV Multispectral Images. Sensors 2017, 17, 2352. [Google Scholar] [CrossRef] [PubMed]
- Hossain, M.S.; Bujang, J.S.; Zakaria, M.H.; Hashim, M. The application of remote sensing to seagrass ecosystems: An overview and future research prospects. Int. J. Remote Sens. 2015, 36, 61–114. [Google Scholar] [CrossRef]
- Hossain, M.S.; Hashim, M. Potential of Earth Observation (EO) technologies for seagrass ecosystem service assessments. Int. J. Appl. Earth Obs. Geoinf. 2019, 77, 15–29. [Google Scholar] [CrossRef]
- Hossain, M.S.; Bujang, J.S.; Zakaria, M.H.; Hashim, M. Application of Landsat images to seagrass areal cover change analysis for Lawas, Terengganu and Kelantan of Malaysia. Cont. Shelf Res. 2015, 110, 124–148. [Google Scholar] [CrossRef]
- Safuan, C.D.M.; Ismail, K.; Khalil, I.; Ali, A.; Chong, W.S.; Chan, A.A.; Ismail, M.N.; Repin, I.M.; Bachok, Z. Quantification of coral reef benthos for coral health assessment in Labuan Marine Park, Malaysia. J. Sustain. Sci. Manag. 2018, 13, 101–112. [Google Scholar]
- Mumby, P.J.; Green, E.P.; Edwards, A.J.; Clark, C.D. Coral reef habitat mapping: How much detail can remote sensing provide? Mar. Biol. 1997, 130, 193–202. [Google Scholar] [CrossRef]
- Mumby, P.J.; Skirving, W.; Strong, A.E.; Hardy, J.T.; LeDrew, E.F.; Hochberg, E.J.; Stumpf, R.P.; David, L.T. Remote sensing of coral reefs and their physical environment. Mar. Pollut. Bull. 2004, 48, 219–228. [Google Scholar] [CrossRef]
- Zhang, H.; Wang, M. Evaluation of sun glint models using MODIS measurements. J. Quant. Spectrosc. Radiat. Transf. 2010, 111, 492–506. [Google Scholar] [CrossRef]
- Legleiter, C.J.; Roberts, D.A. A forward image model for passive optical remote sensing of river bathymetry. Remote Sens. Environ. 2009, 113, 1025–1045. [Google Scholar] [CrossRef]
- Kay, S.; Hedley, J.D.; Lavender, S. Sun Glint Correction of High and Low Spatial Resolution Images of Aquatic Scenes: A Review of Methods for Visible and Near-Infrared Wavelengths. Remote Sens. 2009, 1, 697–730. [Google Scholar] [CrossRef]
- Hodgson, A.; Kelly, N.; Peel, D. Unmanned Aerial Vehicles (UAVs) for Surveying Marine Fauna: A Dugong Case Study. PLoS ONE 2013, 8, e79556. [Google Scholar] [CrossRef] [PubMed]
- Mount, R. Acquisition of through-water aerial survey images: Surface effects and the prediction of sun glitter and subsurface illumination. Photogramm. Eng. Remote Sens. 2005, 71, 1407–1415. [Google Scholar] [CrossRef]
- Wang, M.; Bailey, S.W. Correction of sun glint contamination on the SeaWiFS ocean and atmosphere products. Appl. Opt. 2001, 40, 4790–4798. [Google Scholar] [CrossRef]
- Ottaviani, M.; Spurr, R.; Stamnes, K.; Li, W.; Su, W.; Wiscombe, W. Improving the description of sunglint for accurate prediction of remotely sensed radiances. J. Quant. Spectrosc. Radiat. Transf. 2008, 109, 2364–2375. [Google Scholar] [CrossRef]
- Hochberg, E.J.; Andrefouet, S.; Tyler, M.R. Sea surface correction of high spatial resolution Ikonos images to improve bottom mapping in near-shore environments. IEEE Trans. Geosci. Remote Sens. 2003, 41, 1724–1729. [Google Scholar] [CrossRef]
- Hedley, J.D.; Harborne, A.R.; Mumby, P.J. Simple and robust removal of sun glint for mapping shallow-water benthos. Int. J. Remote Sens. 2005, 26, 2107–2112. [Google Scholar] [CrossRef]
- Goodman, J.A.; Lee, Z.; Ustin, S.L. Influence of atmospheric and sea-surface corrections on retrieval of bottom depth and reflectance using a semi-analytical model: A case study in Kaneohe Bay, Hawaii. Appl. Opt. 2008, 47, F1–F11. [Google Scholar] [CrossRef]
- Kutser, T.; Vahtmäe, E.; Praks, J. A sun glint correction method for hyperspectral imagery containing areas with non-negligible water leaving NIR signal. Remote Sens. Environ. 2009, 113, 2267–2274. [Google Scholar] [CrossRef]
- Martin, J.; Eugenio, F.; Marcello, J.; Medina, A. Automatic Sun Glint Removal of Multispectral High-Resolution Worldview-2 Imagery for Retrieving Coastal Shallow Water Parameters. Remote Sens. 2016, 8, 37. [Google Scholar] [CrossRef]
- Singh, R.; Shanmugam, P. A robust method for removal of glint effects from satellite ocean colour imagery. Ocean Sci. 2014, 11, 2791–2829. [Google Scholar] [CrossRef]
- Montagner, F.; Billat, V.; Belanger, S. MERIS ATBD 2.13 Sun Glint Flag Algorithm. Available online: https://earth.esa.int/documents/700255/2042855/MERIS_ATBD_2.13_v4.3+-+2011+%28new+format%29.pdf (accessed on 25 May 2019).
- Doerffer, R.; Schiller, H.; Fischer, J.; Preusker, R.; Bouvet, M. The Impact of Sun Glint on the Retrieval of Water Parameters and Possibilities for the Correction of MERIS Scenes. In Proceedings of the 2nd MERIS-(A)ATSR Workshop, Frascati, Italy, 22–26 September 2008. [Google Scholar]
- Lyzenga, D.R.; Malinas, N.P.; Tanis, F.J. Multispectral bathymetry using a simple physically based algorithm. IEEE Trans. Geosci. Remote Sens. 2006, 44, 2251–2259. [Google Scholar] [CrossRef]
- Harmel, T.; Chami, M.; Tormos, T.; Reynaud, N.; Danis, P.-A. Sunglint correction of the Multi-Spectral Instrument (MSI)-SENTINEL-2 imagery over inland and sea waters from SWIR bands. Remote Sens. Environ. 2018, 204, 308–321. [Google Scholar] [CrossRef]
- Garaba, S.P.; Schulz, J.; Wernand, M.R.; Zielinski, O. Sunglint Detection for Unmanned and Automated Platforms. Sensors 2012, 12, 12545–12561. [Google Scholar] [CrossRef]
- Russell, B.; Dierssen, H. Hochberg Water column optical properties of pacific coral reefs across geomorphic zones and in comparison to offshore waters. Remote Sens. 2019, 11, 1757. [Google Scholar] [CrossRef]
- Fogarty, M.C.; Fewings, M.R.; Paget, A.C.; Dierssen, H.M. The influence of a sandy substrate, seagrass, or highly turbid water on albedo and surface heat flux. J. Geophys. Res. Ocean. 2018, 123, 53–73. [Google Scholar] [CrossRef]
- Hochberg, E.J.; Atkinson, M.J.; Apprill, A.; Andréfouët, S. Spectral reflectance of coral. Coral Reefs 2004, 23, 84–95. [Google Scholar] [CrossRef]
- Kutser, T.; Miller, I.; Jupp, D.L.B. Mapping coral reef benthic substrates using hyperspectral space-borne images and spectral libraries. Estuar. Coast. Shelf Sci. 2006, 70, 449–460. [Google Scholar] [CrossRef]
- Vahtmäe, E.; Kutser, T.; Martin, G.; Kotta, J. Feasibility of hyperspectral remote sensing for mapping benthic macroalgal cover in turbid coastal waters-a Baltic Sea case study. Remote Sens. Environ. 2006, 101, 342–351. [Google Scholar] [CrossRef]
- Kutser, T.; Dekker, A.G.; Skirving, W. Modeling spectral discrimination of Great Barrier Reef benthic communities by remote sensing instruments. Limnol. Oceanogr. 2003, 48, 497–510. [Google Scholar] [CrossRef]
- Lee, K.S.; Seng, L.Y. Simulation Studies on the Electrical Power Potential Harnessed by Tidal Current Turbines. J. Energy Environ. 2009, 1, 18–23. [Google Scholar]
- McFeeters, S.K. The use of the Normalized Difference Water Index (NDWI) in the delineation of open water features. Int. J. Remote Sens. 1996, 17, 1425–1432. [Google Scholar] [CrossRef]
- Hossain, M.S.; Hashim, M.; Bujang, J.S.; Zakaria, M.H.; Muslim, A.M. Assessment of the impact of coastal reclamation activities on seagrass meadows in Sungai Pulai estuary, Malaysia, using Landsat data (1994–2017). Int. J. Remote Sens. 2018, 40, 3571–3605. [Google Scholar] [CrossRef]
- Joyce, K.E. A Method for Mapping Live Coral Cover Using Remote Sensing. Ph.D. Thesis, The University of Queensland, Brisbane, Australia, 2004. [Google Scholar]
- Overstreet, B.T.; Legleiter, C.J. Removing sun glint from optical remote sensing images of shallow rivers. Earth Surf. Process. Landf. 2017, 42, 318–333. [Google Scholar] [CrossRef]
- Roelfsema, C.; Phinn, S. Integrating field data with high spatial resolution multispectral satellite imagery for calibration and validation of coral reef benthic community maps. J. Appl. Remote Sens. 2010, 4, 043527. [Google Scholar] [CrossRef]
- Veron, J.E.N. Corals of the World, 1st ed.; Australian Institute of Marine Science: Townsville MC, Australia, 2000. [Google Scholar]
- Lyzenga, D.R. Remote sensing of bottom reflectance and water attenuation parameters in shallow water using aircraft and Landsat data. Int. J. Remote Sens. 1981, 2, 71–82. [Google Scholar] [CrossRef]
- Lyzenga, D.R. Passive remote sensing techniques for mapping water depth and bottom features. Appl. Opt. 1978, 17, 379–383. [Google Scholar] [CrossRef]
- Cortes, C.; Vapnik, V. Support-vector networks. Mach. Learn. 1995, 20, 273–297. [Google Scholar] [CrossRef]
- Mohamed, H.; Nadaoka, K.; Nakamura, T. Assessment of Machine Learning Algorithms for Automatic Benthic Cover Monitoring and Mapping Using Towed Underwater Video Camera and High-Resolution Satellite Images. Remote Sens. 2018, 10, 773. [Google Scholar] [CrossRef]
- Keerthi, S.S.; Shevade, S.K.; Bhattacharyya, C.; Murthy, K.R.K. Improvements to Platt’s SMO Algorithm for SVM Classifier Design. Neural Comput. 2001, 13, 637–649. [Google Scholar] [CrossRef]
- Congalton, R.G. A review of assessing the accuracy of classifications of remotely sensed data. Remote Sens. Environ. 1991, 37, 35–46. [Google Scholar] [CrossRef]
- Canty, M.J. Image Analysis, Classification and Change Detection in Remote Sensing: With Algorithms for ENVI/IDL and Python, 3rd ed.; CRC Press: Boca Raton, FL, USA, 2014. [Google Scholar]
- Cohen, J. A coefficient of agreement for nominal scales. Educ. Psychol. Meas. 1960, 20, 37–46. [Google Scholar] [CrossRef]
- Murfitt, S.L.; Allan, B.M.; Bellgrove, A.; Rattray, A.; Young, M.A.; Ierodiaconou, D. Applications of unmanned aerial vehicles in intertidal reef monitoring. Sci. Rep. 2017, 7, 10259. [Google Scholar] [CrossRef] [PubMed]
- Zhou, G.; Xu, W.; Niu, C.; Zhang, K.; Ma, Z.; Wang, J.; Zhang, Y. Versatile time-dependent spatial distribution model of sun glint for satellite-based ocean imaging. J. Appl. Remote Sens. 2017, 11, 1–18. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Site Characteristics | Site-1: Pantai Pasir Cina | Site-2: Pantai Vietnam |
|---|---|---|
| Tide type | Mixed tide (dominant diurnal) | |
| Coral benthic substrates | ||
| Shallow area (−0.1 to −1 m water depths during the lowest tide) | Fine sand; submerged rocks; coral rubble | Fine sand; submerged rocks; coral rubble |
| Reef flat (−1 to −5 m water depths during the lowest tide) | Live coral cover is dominated by branching coral—Acropora (branching and bottlebrush), tabulate coral—Acropora and Montipora, patch coral, and several non-coral components such as dead coral with algae, coral rubble, sand, and dead mushroom coral | Live coral consists of branching—Acropora, tabulate coral—Acropora, and massive coral Non-coral cover, such as coral rubble, dead coral with algae, and submerged rocks |
| Reef crest (−5 to −6 m water depths) | Live coral cover is dominated by mushroom coral, branching coral—Acropora, and massive coral | Live coral consists of massive coral and tabulate—Acropora; submerged rocks are also present |
| Reef front/fore reef (−6 m to −7 m water depths) | Live coral cover is dominated by branching coral—Acropora and Pocillopora (bushy); another coral colony form is massive coral—Porites, Favites, Platygyra, and Goniastrea | |
| Deep sea (>−7 m water depth) | Fine sand, dead coral, and live coral patches with a combination of branching, massive, and submassive coral such as Acropora, Pocillopora, Porites, Favites, and Gonisastrea | Fine sand, dead coral, and live coral patches with the combination of branching, massive, and submassive coral such as Acropora, Pocillopora, Porites, Favites, and Gonisastrea |
| Environmental charactEristics | Date: 20 April 2016 | Data Source | |
|---|---|---|---|
| Time (UTC+8) | |||
| 12:00 p.m. | 6:00 p.m. | ||
| Oceanographic data | |||
| Salinity (ppt) | 33.1 | Hybrid Coordinate Ocean Model (HYCOM), http://www.hycom.org/ | |
| U component of current (m/s) | −0.001 | ||
| V component of current (m/s) | 0.015 | ||
| Meteorological data | |||
| Sea surface temperature (°C) | 30.3 | European Center for Medium-Range Weather Forecasts (ECMWF), https://www.ecmwf.int/ | |
| U component of wind (m/s) | −3.197 | −2.263 | |
| V component of wind (m/s) | −1.982 | −0.379 | |
| Total cloud cover (%) | 1.2 | 41.9 | |
| Tidal dataat 0.0 m mean sea level | |||
| Tide height (m) | −0.1 | 0.1 | WorldTides, https://www.worldtides.info/ |
| Lowest astronomical tide (m) | −1.13 | ||
| Highest astronomical tide (m) | 1.17 | ||
| Mean high water (m) | 0.47 | ||
| Mean low water (m) | −0.47 | ||
| Site-1: Strategy-1 | ||||||||||
| Mapped class | Uncorrected | Lyzenga et al. [35] | Joyce [47] | Hedley et al. [28] | Goodman et al. [29] | |||||
| UA (%) | PA (%) | UA (%) | PA (%) | UA (%) | PA (%) | UA (%) | PA (%) | UA (%) | PA (%) | |
| BC | 70.5 | 70.5 | 90.9 | 82.0 | 90.9 | 82.0 | 90.9 | 82.0 | 92.3% | 78.7 |
| TC | 62.3 | 62.3 | 95.3 | 88.4 | 95.3 | 88.4 | 95.3 | 88.4 | 95.5% | 91.3 |
| PC | 65.0 | 76.1 | 83.9 | 88.9 | 75.7 | 90.6 | 75.5 | 89.7 | 72.9% | 89.7 |
| R | 83.8 | 67.9 | 80.9 | 95.6 | 82.9 | 95.6 | 81.9 | 95.6 | 82.9% | 95.6 |
| S | 55.8 | 64.9 | 100.0 | 43.2 | 100.0 | 10.8 | 100.0 | 8.1 | 100.0% | 2.7 |
| Correctly mapped | 292/421 | 362/421 | 352/421 | 350/421 | 348/421 | |||||
| OA | 69.4% | 86.0% | 83.6% | 83.1% | 82.7% | |||||
| k | 0.600 | 0.812 | 0.779 | 0.772 | 0.765 | |||||
| Site-1: Strategy-2 | ||||||||||
| Mapped class | Lyzenga et al. [35] | Joyce [47] | Hedley et al. [28] | Goodman et al. [29] | ||||||
| UA (%) | PA (%) | UA (%) | PA (%) | UA (%) | PA (%) | UA (%) | PA (%) | |||
| BC | 89.7 | 85.2 | 92.6 | 82.0 | 89.3 | 82.0 | 90.3 | 91.8 | ||
| TC | 100.0 | 91.3 | 100.0 | 85.5 | 100.0 | 87.0 | 100.0 | 68.1 | ||
| PC | 91.1 | 87.2 | 84.7 | 89.7 | 86.8 | 89.7 | 82.7 | 98.3 | ||
| R | 78.4 | 97.8 | 77.5 | 95.6 | 74.9 | 95.6 | 76.2 | 95.6 | ||
| S | 100.0 | 45.9 | 100.0 | 40.5 | 100.0 | 24.3 | 100.0 | 2.7 | ||
| Correctly mapped | 368/421 | 360/421 | 355/421 | 350/421 | ||||||
| OA | 87.4% | 85.5% | 84.3% | 83.1% | ||||||
| k | 0.831 | 0.805 | 0.788 | 0.771 | ||||||
| Site-2: Strategy-2 | |||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Mapped class | Uncorrected | Lyzenga et al. [35] | Joyce [47] | Hedley et al. [28] | Goodman et al. [29] | ||||||||
| UA (%) | PA (%) | UA (%) | PA (%) | UA (%) | PA (%) | UA (%) | PA (%) | UA (%) | PA (%) | ||||
| BC | 55.9 | 82.6 | 76.1 | 73.9 | 75.7 | 81.2 | 82.4 | 81.2 | 83.3 | 79.7 | |||
| TC | 47.9 | 61.6 | 89.6 | 82.2 | 84.2 | 87.7 | 83.1 | 94.5 | 70.8 | 63.0 | |||
| PC | 76.3 | 71.0 | 92.8 | 90.0 | 91.1 | 92.0 | 90.6 | 87.0 | 83.3 | 80.0 | |||
| R | 87.0 | 67.6 | 89.7 | 93.9 | 89.8 | 89.2 | 89.1 | 82.4 | 83.5 | 92.6 | |||
| S | 22.7 | 13.9 | 75.0 | 83.3 | 67.9 | 52.8 | 52.4 | 61.1 | 68.6 | 66.7 | |||
| Correctly mapped | 278/426 | 370/426 | 363/426 | 356/426 | 342/426 | ||||||||
| OA | 65.3% | 86.9% | 85.2% | 83.6% | 80.3% | ||||||||
| k | 0.551 | 0.827 | 0.805 | 0.786 | 0.739 | ||||||||
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Muslim, A.M.; Chong, W.S.; Safuan, C.D.M.; Khalil, I.; Hossain, M.S. Coral Reef Mapping of UAV: A Comparison of Sun Glint Correction Methods. Remote Sens. 2019, 11, 2422. https://doi.org/10.3390/rs11202422
Muslim AM, Chong WS, Safuan CDM, Khalil I, Hossain MS. Coral Reef Mapping of UAV: A Comparison of Sun Glint Correction Methods. Remote Sensing. 2019; 11(20):2422. https://doi.org/10.3390/rs11202422
Chicago/Turabian StyleMuslim, Aidy M, Wei Sheng Chong, Che Din Mohd Safuan, Idham Khalil, and Mohammad Shawkat Hossain. 2019. "Coral Reef Mapping of UAV: A Comparison of Sun Glint Correction Methods" Remote Sensing 11, no. 20: 2422. https://doi.org/10.3390/rs11202422
APA StyleMuslim, A. M., Chong, W. S., Safuan, C. D. M., Khalil, I., & Hossain, M. S. (2019). Coral Reef Mapping of UAV: A Comparison of Sun Glint Correction Methods. Remote Sensing, 11(20), 2422. https://doi.org/10.3390/rs11202422