Response to Variations in River Flowrate by a Spaceborne GNSS-R River Width Estimator


Abstract
:
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
1. Introduction
2. Materials and Methods
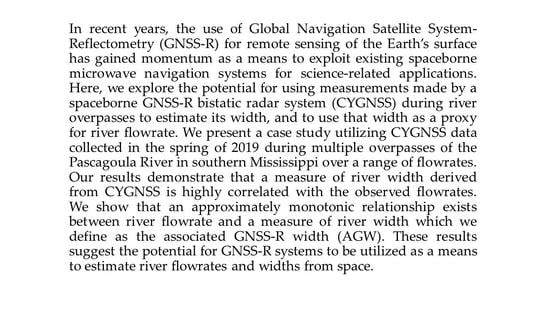
2.1. CYGNSS Background
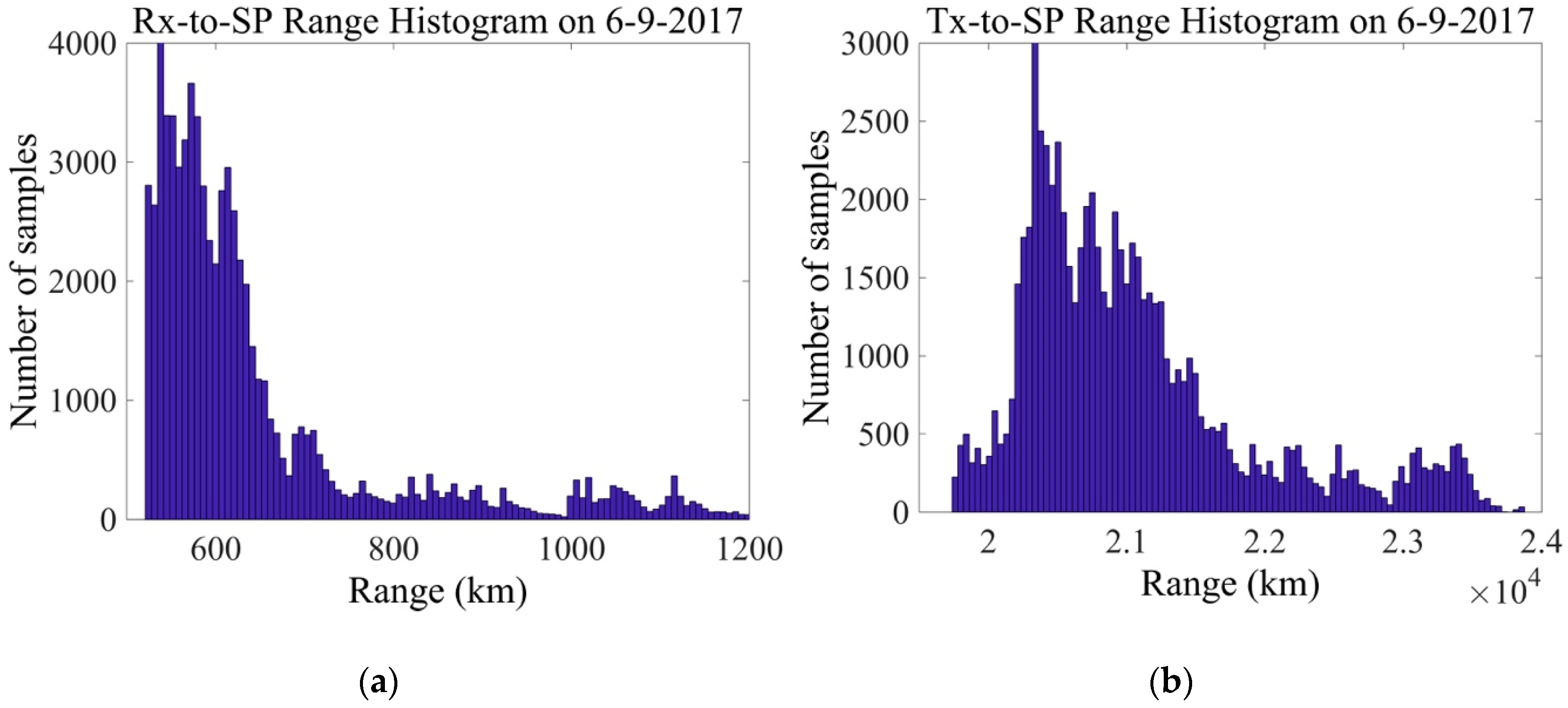
2.2. Theoretical Basis of the High-Spatial-Resolution Land/Water Mapping Capability
- (τ, f) = delay and Doppler coordinates in the delay Doppler map (DDM)
- PT = transmitted power
- GR = receive antenna gain
- GT = transmit antenna gain
- Λ = lag correlation function due to the correlation with a local replica of the GPS pseudorandom noise (PRN) code
- S = Doppler filter response due to selective filtering of the Doppler-shifted received signal
- = vector distances from the specular point to the transmitter and receiver, respectively
- σ0 = normalized scattering cross section of the rough surface (BRCS)
- λ = signal wavelength (19 cm)
- = vector distance from a point on the Earth’s surface to the specular point
- Zf = term to account for area/shape of smooth surface region affecting first Fresnel zone
- = surface Fresnel reflectivity for incidence angle
- ; electromagnetic wavenumber
- h = surface rms height
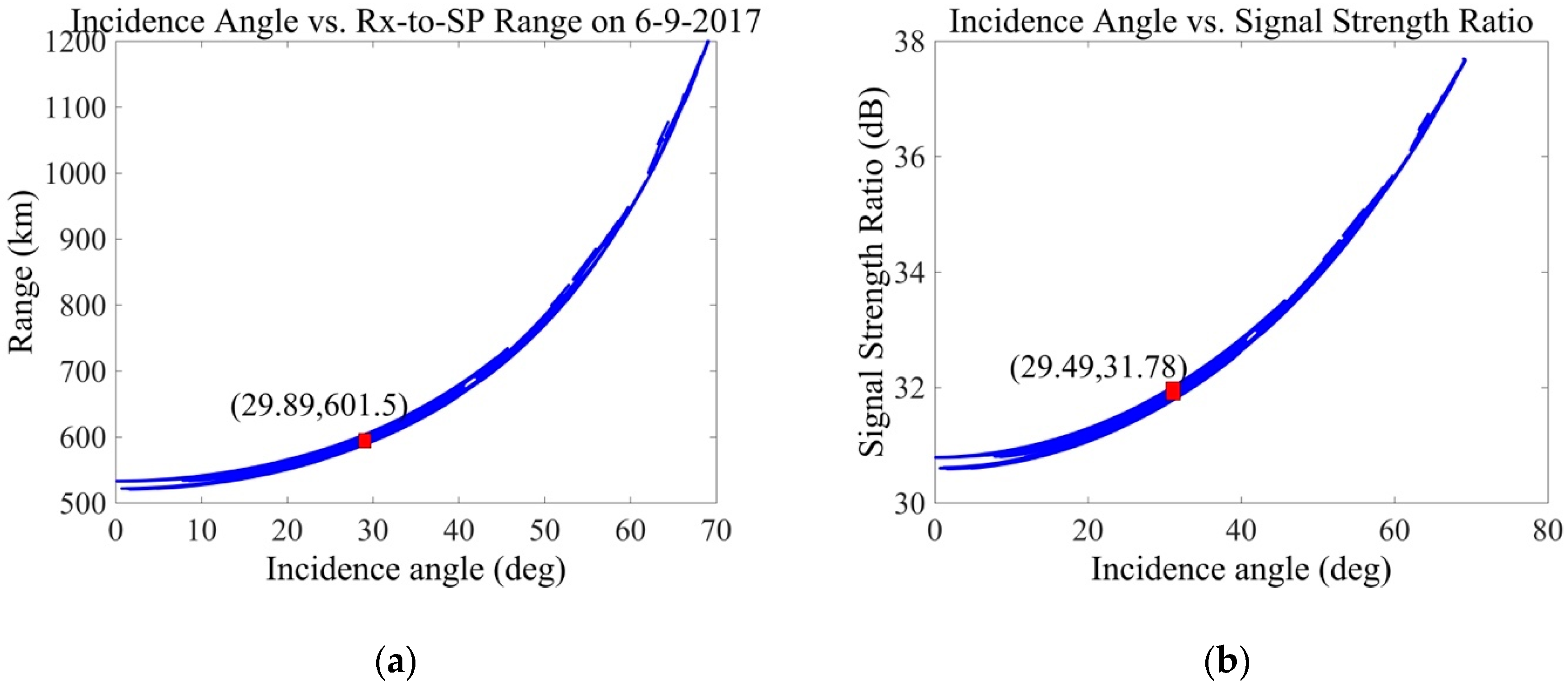
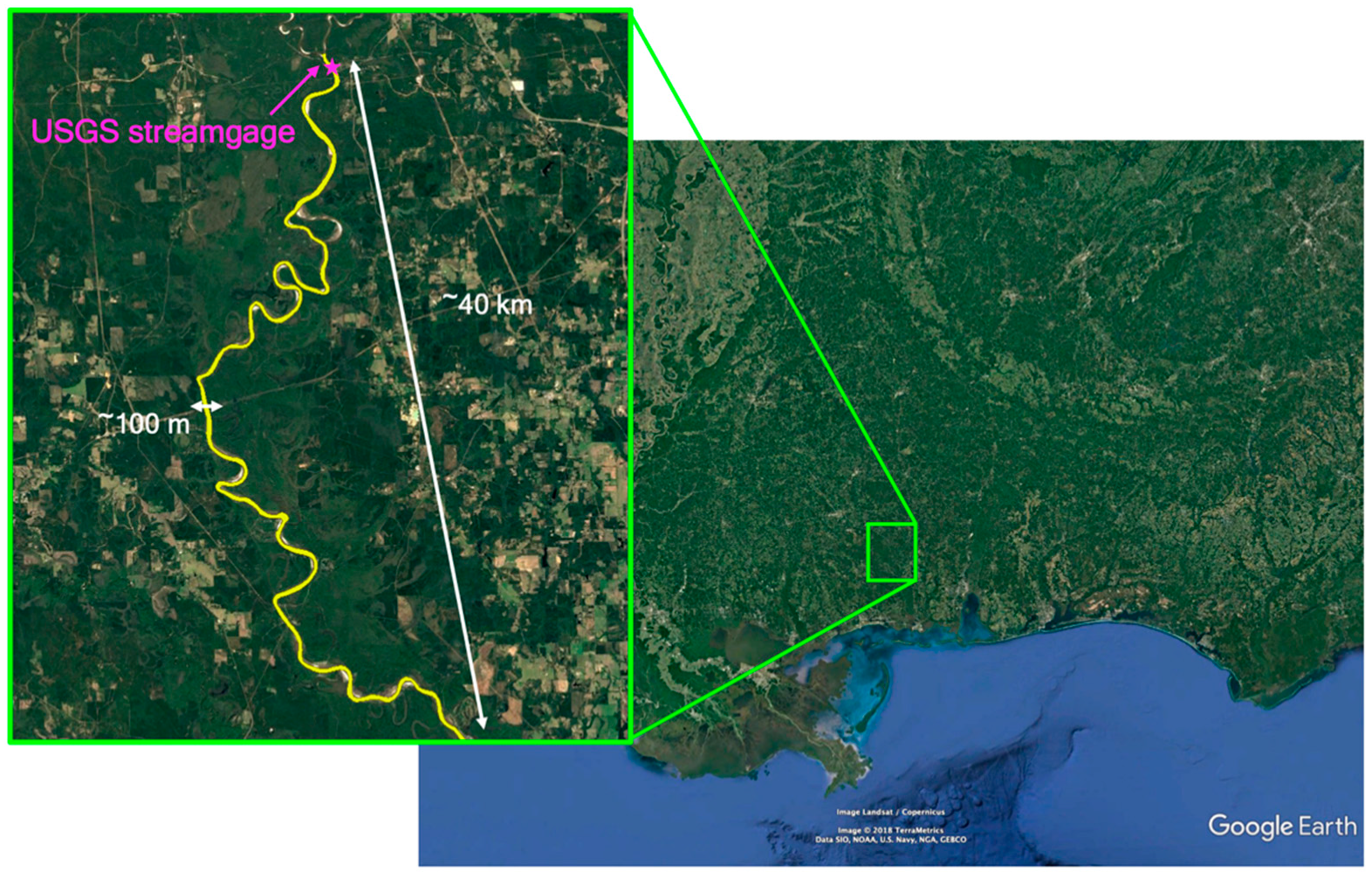
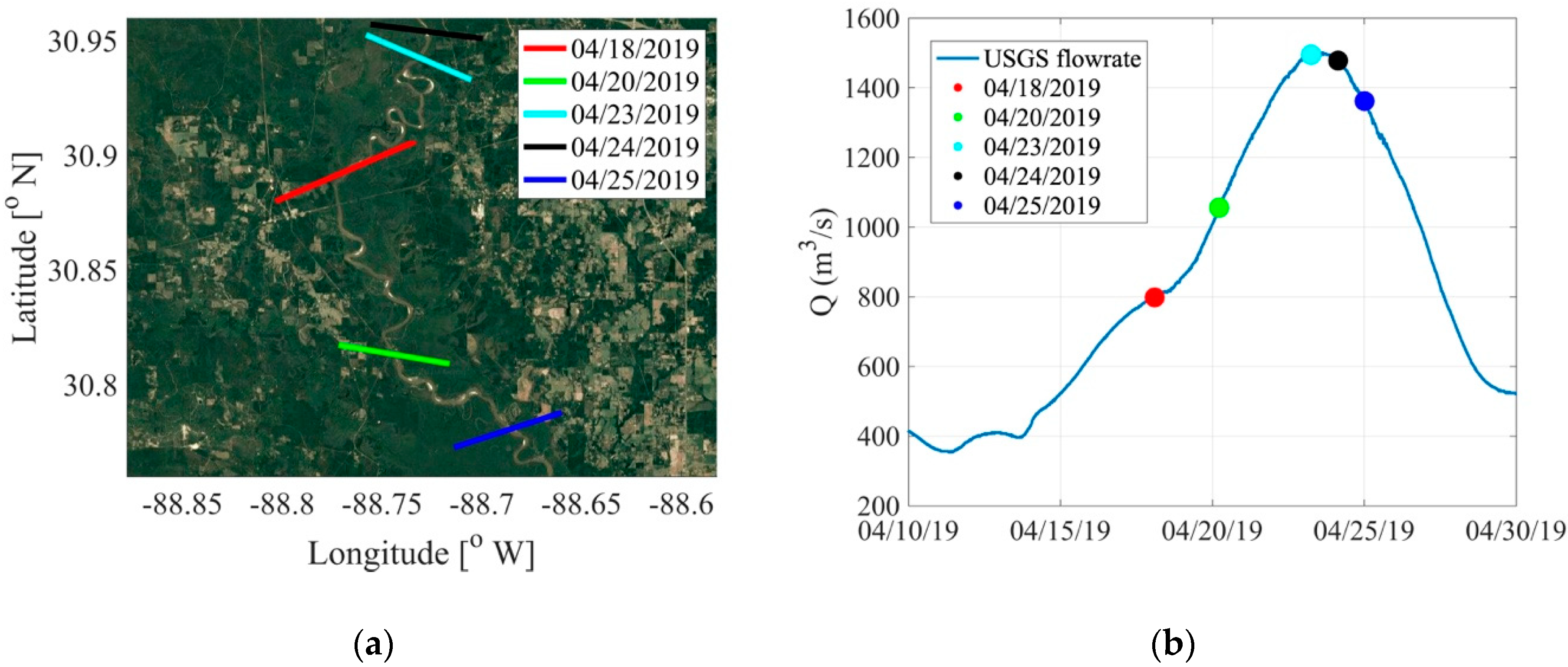
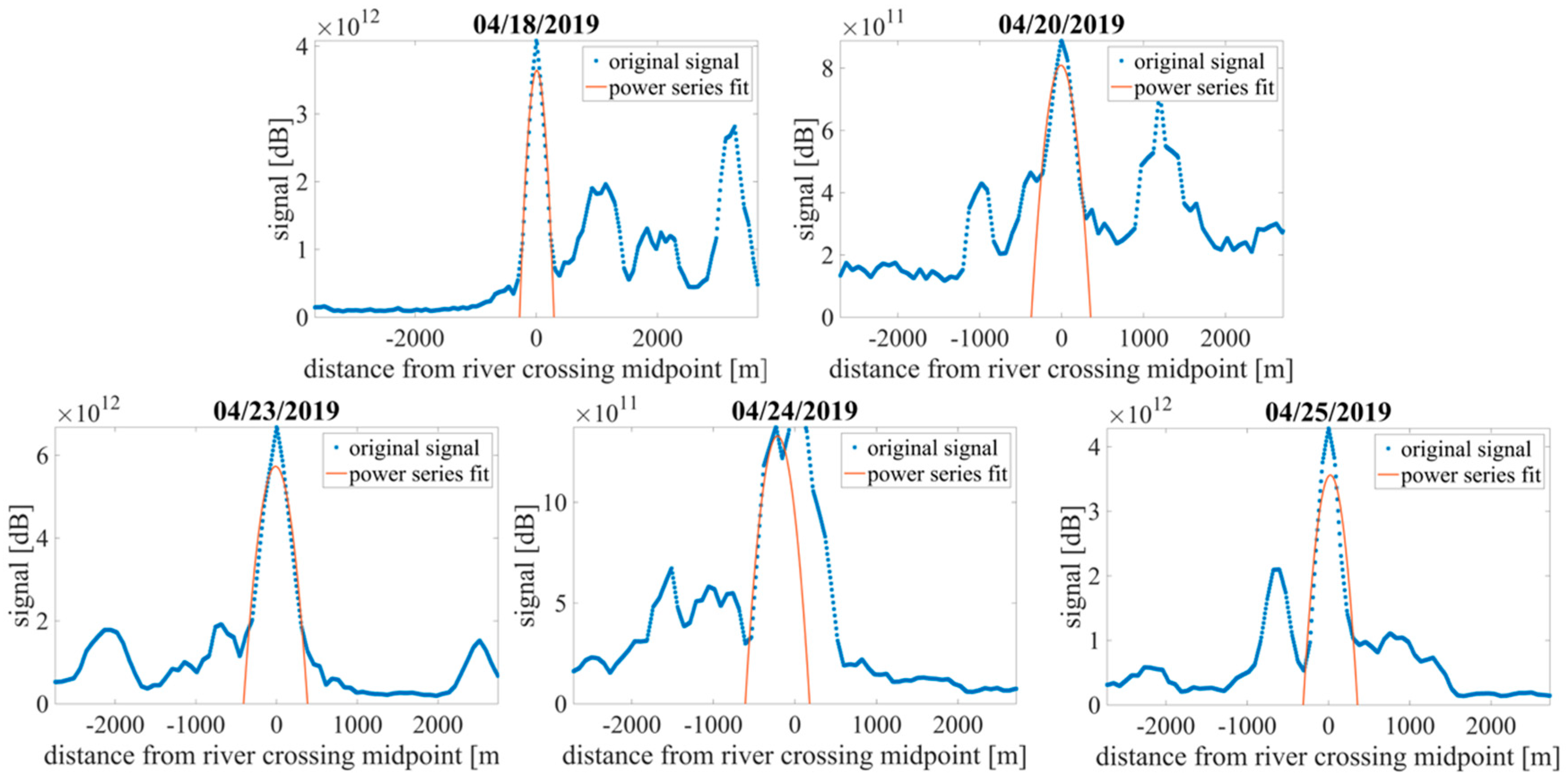
2.3. Case Study: Pascagoula River
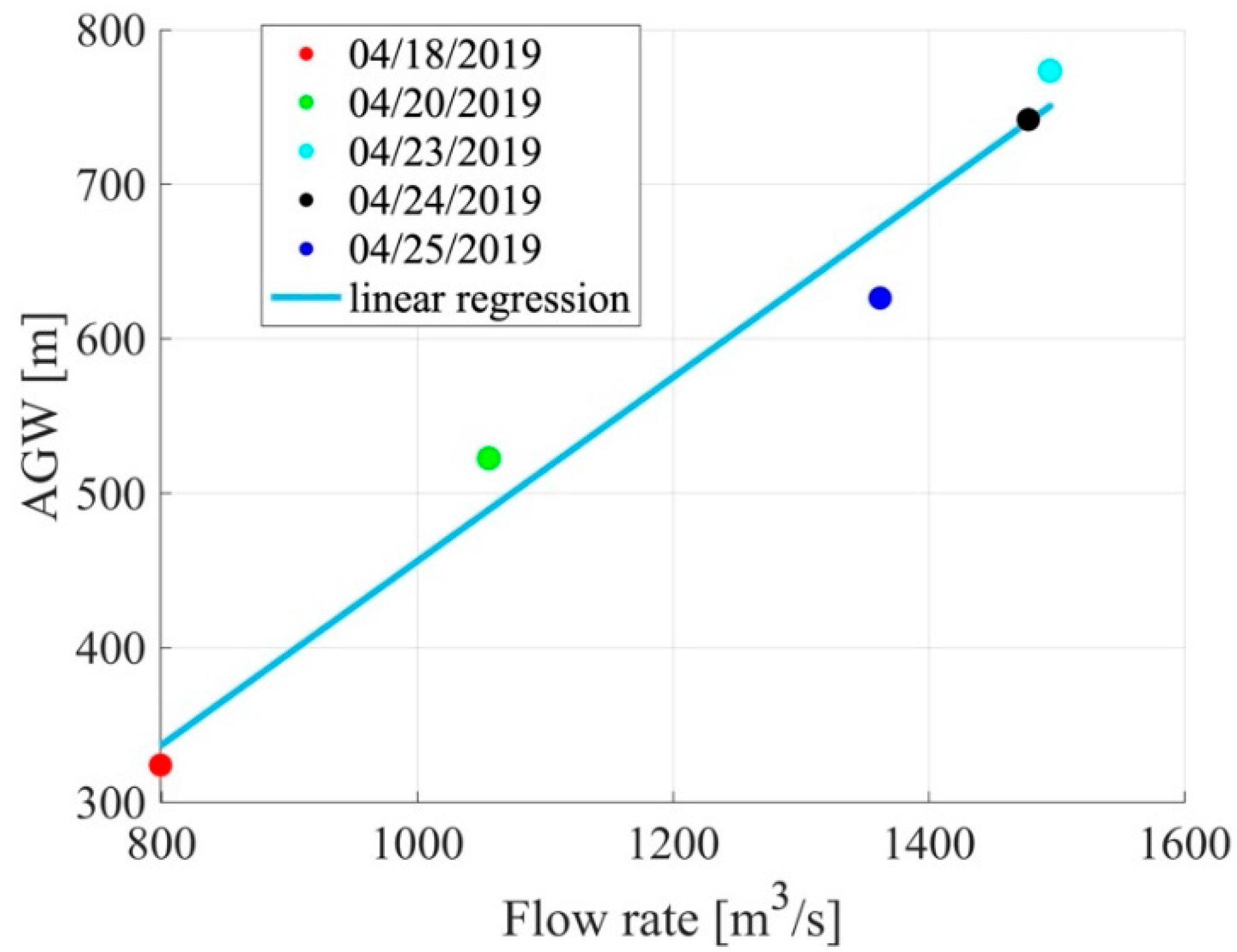
3. Results
4. Discussion
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Shiklomanov, A.I.; Lammers, R.B.; Vörösmarty, C.J. Widespread decline in hydrological monitoring threatens pan-Arctic research. Eos Trans. Am. Geophys. Union 2002, 83, 13–17. [Google Scholar] [CrossRef]
- Durand, M.; Gleason, C.; Garambois, P.-A.; Bjerklie, D.; Smith, L.; Roux, H.; Rodriguez, E.; Bates, P.D.; Pavelsky, T.M.; Monnier, J. An intercomparison of remote sensing river discharge estimation algorithms from measurements of river height, width, and slope. Water Resour. Res. 2016, 52, 4527–4549. [Google Scholar] [CrossRef] [Green Version]
- Sichangi, A.W.; Wang, L.; Yang, K.; Chen, D.; Wang, Z.; Li, X.; Zhou, J.; Liu, W.; Kuria, D. Estimating continental river basin discharges using multiple remote sensing data sets. Remote. Sens. Environ. 2016, 179, 36–53. [Google Scholar] [CrossRef] [Green Version]
- Ruf, C.S.; Chew, C.; Lang, T.; Morris, M.G.; Nave, K.; Ridley, A.; Balasubramaniam, R. A new paradigm in earth environmental monitoring with the CYGNSS small satellite constellation. Sci. Rep. 2018, 8, 8782. [Google Scholar] [CrossRef] [PubMed]
- Balakhder, A.; Al-Khaldi, M.; Johnson, J. On the coherency of ocean and land surface specular scattering for GNSS-R and signals of opportunity systems. IEEE Trans. Geosci. Remote Sens. 2019, 57, 1–11. [Google Scholar] [CrossRef]
- Allen, G.H.; Pavelsky, T.M. Patterns of river width and surface area revealed by the satellite-derived North American river width data set. Geophys. Res. Lett. 2015, 42, 395–402. [Google Scholar] [CrossRef]
- Gleason, C.J.; Smith, L.C. Toward global mapping of river discharge using satellite images and at-many-stations hydraulic geometry. Proc. Natl. Acad. Sci. USA 2014, 111, 4788–4791. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Gleason, C.J.; Smith, L.C.; Lee, J. Retrieval of river discharge solely from satellite imagery and at-many-stations hydraulic geometry: Sensitivity to river form and optimization parameters. Water Resour. Res. 2014, 50, 9604–9619. [Google Scholar] [CrossRef]
- Pavelsky, T.M. Using width-based rating curves from spatially discontinuous satellite imagery to monitor river discharge. Hydrol. Process. 2014, 28, 3035–3040. [Google Scholar] [CrossRef]
- Bjerklie, D.M.; Moller, D.; Smith, L.C.; Dingman, S.L. Estimating discharge in rivers using remotely sensed hydraulic information. J. Hydrol. 2005, 309, 191–209. [Google Scholar] [CrossRef]
- Yoon, Y.; Durand, M.; Merry, C.J.; Clark, E.A.; Andreadis, K.M.; Alsdorf, D.E. Estimating river bathymetry from data assimilation of synthetic SWOT measurements. J. Hydrol. 2012, 464–465, 363–375. [Google Scholar] [CrossRef]






© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Warnock, A.; Ruf, C. Response to Variations in River Flowrate by a Spaceborne GNSS-R River Width Estimator. Remote Sens. 2019, 11, 2450. https://doi.org/10.3390/rs11202450
Warnock A, Ruf C. Response to Variations in River Flowrate by a Spaceborne GNSS-R River Width Estimator. Remote Sensing. 2019; 11(20):2450. https://doi.org/10.3390/rs11202450
Chicago/Turabian StyleWarnock, April, and Christopher Ruf. 2019. "Response to Variations in River Flowrate by a Spaceborne GNSS-R River Width Estimator" Remote Sensing 11, no. 20: 2450. https://doi.org/10.3390/rs11202450
APA StyleWarnock, A., & Ruf, C. (2019). Response to Variations in River Flowrate by a Spaceborne GNSS-R River Width Estimator. Remote Sensing, 11(20), 2450. https://doi.org/10.3390/rs11202450