1. Introduction
Controlling and managing above-ground vegetation has crucial importance in studies related to reducing carbon emissions [
1] or associated with deforestation and forest degradation [
2]. Both effects are increased by wildland fires and progressive abandonment of farming lands [
3,
4]. Biomass is a key structural variable in all the studies about ecosystem dynamics, biodiversity, and sustainability [
3,
5,
6]. For example, maps of forest fuel were obtained by [
7], and the spatiotemporal evolution of the risk of forest fire using landsat satellite imagery was studied by [
8]. The dynamics of the biomass structure were analysed by [
9] and related to different stages of flammability.
According to [
4,
10], the importance of shrublands in the Mediterranean ecosystem is very high due to their significance in the forest dynamic and the large swathe of territory occupied, but most of the studies carried out in the literature are about the biomass of tree species [
11,
12,
13]. Biomass estimation in a forest environment can be undertaken in a direct way by harvesting and weighing sampled plant material [
14] or indirectly by measuring morphological variables and applying mathematical models. The first method generates more accurate estimations but is more time-consuming, while the second is indicated for multitemporal studies. A mixed model consists of harvesting a sample of plant material and calibrating the mathematical model using the collected data [
4,
9].
Phytovolume is the volume under vegetal canopy, while biomass represents the weight of the aerial part of the vegetation. The relationship between biomass and phytovolume using apparent density was applied by [
15] for indirect estimation of biomass, demonstrating that phytovolume is a good estimator of biomass with regression coefficients of up to 90%. Species were characterised by their apparent density and biomass ratio, which were modelled through regressions between phytovolume and biomass. In another study, model regressions were characterised between biomass and phytovolume for 16 Mediterranean shrub species divided into five density classes [
16]. Phytovolume was used by [
17] for demonstrating significant differences between two management systems, grazing and not-grazing, with respect to the flammability of forest resources.
Instead of harvested plant material, aerial data have been widely used for indirect measurement in the literature, including optical, SAR, LiDAR, and unmanned aerial vehicle (UAV) data-based methods with the empirical radiative transfer model, machine learning algorithms, and artificial intelligence.
Artificial neural network (ANN) models incorporating radar data performed better in estimating phytomass than ANN models, using only optical vegetation indices with r-squared values of 0.79 and 0.6, respectively [
18]. Other studies centred on multispectral satellite imagery were carried out by [
19], who used height and diameter data and a classification of cover fraction based on Quickbird and Landsat imagery for mapping fuel type. A comparison of eight spectral indices of vegetation based on MODIS imagery for fire prediction purposes was undertaken by [
20].
LiDAR point cloud information and multispectral imagery were combined to obtain fuel maps with up to 85.43% global agreement, using object-based image analysis (OBIA) [
7]. The height of the canopy was measured with LiDAR and hyperspectral sensors by [
15] for adjusting regressions to biomass. The same source of data was used by [
6] for obtaining biomass and stress maps. A complete review of the accuracies obtained in biomass estimations based on LiDAR data by different authors can be read in [
3].
Biomass was monitored by [
21] using P-band SAR with multitemporal observations, concluding that P-bands are the most suited frequency for above-ground biomass of boreal forests; multitemporal satellite imagery and SAR data were combined by [
22] for above-ground biomass estimation reaching an adjusted R
2 of 0.43 and RMSE of around 70 Mg/ha; and above-ground biomass was estimated by [
23,
24] from UAV data at a different scale levels, obtaining correlations of r
2 = 0.67, RMSE = 344 g/m
2 and r
2 = 0.98, RMSE = 91.48 g/m
2, respectively.
Phytovolume can be obtained by taking the difference between the digital surface model (DSM), which involves the canopy and base soil between vegetation clusters, and the digital terrain model (DTM), which covers the terrain surface without vegetation [
25].
The Mediterranean shrubland has low-lying vegetation with a relatively high fractional vegetation cover (FVC) [
5,
17]. These characteristics compromise the phytovolume modelling for two main reasons: The point clouds obtained from photogrammetric methods, radar, or LiDAR, have a low density of points located at the bare soil, and the radiometric methods based on multispectral imagery classification tend to underestimate the phytovolume due to the difficulty of dead vegetation detection.
With the recent development of civilian use of UAVs, a large variety of sensors with the capacity for close-range sensing has been applied in environmental engineering in general and for monitoring specific ecosystem variables [
26,
27,
28]. Digital cameras operating in the visible spectrum are used for UAV-photogrammetric projects combined with the structure from motion (SfM) [
29] and multi-view stereopsis (MVS) [
30] techniques, producing very high-resolution orthoimages, DSMs, DTMs, and very dense point clouds of the terrain [
31,
32]. Most of the indices designed for remote sensing based on satellite imagery can be applied or adapted to multispectral sensors mounted on UAVs.
Due to the low altitude of flights and the high resolution of the sensors carried by UAVs, the accuracies of photogrammetric products can reach 0.053 m, 0.070 m, and 0.061 m in the X, Y, and Z directions, respectively, even in environs with extreme topography [
33]. These accuracy levels make it possible to evaluate phytovolume at a local scale and to calibrate satellite data based on a regional scale. In this way, biomass estimation becomes more efficient, even in inaccessible mountain areas.
Furthermore, the spatiotemporal monitoring of phytovolume can be undertaken when UAVs operate in autonomous navigation mode with programmed flight routes, thanks to the control devices based on the global navigation satellite system (GNSS). Unlike in satellite imagery, the temporal resolution of UAV imagery is controlled by the user, so flights can be programmed to register a dramatic change of phytovolume, e.g., pre- and post-fire [
27].
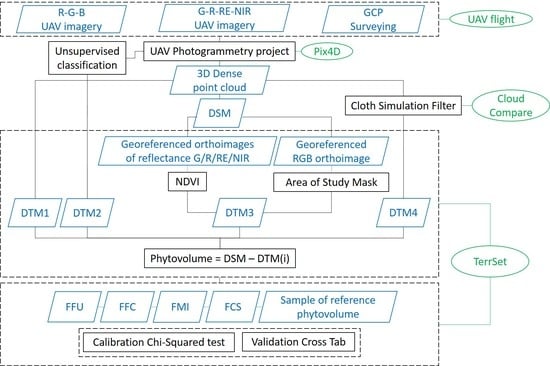
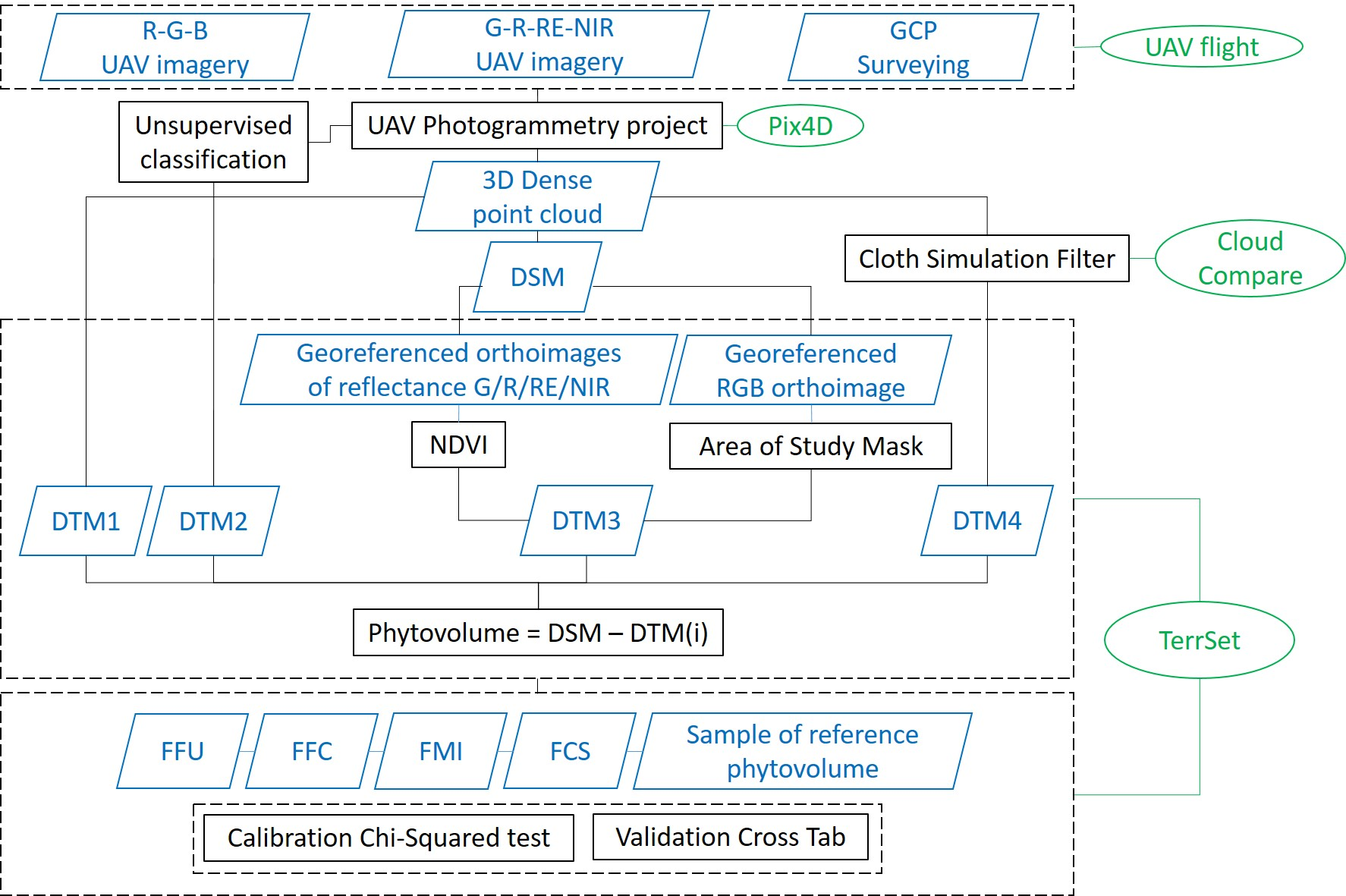
This work aimed to evaluate the ability of four phytovolume estimation methods, all obtained using the difference between DSM and DTM, based on very high-resolution spatial imagery collected by a multispectral sensor onboard a UAV. If phytovolume could be accurately estimated based on UAV-photogrammetry and multispectral imagery, then a new indirect method for indirect biomass estimation could be developed, characterising the apparent density of the predominant vegetation.
The DSM was obtained from the UAV-photogrammetric process, while the four DTMs were calculated following the most common methods in bibliography about multispectral imagery, that is, interpolation of unclassified dense point cloud produced through a UAV-photogrammetric project and interpolation of unsupervised classified dense point cloud based on a multispectral vegetation index and using a cloth simulation filter.
2. Materials and Methods
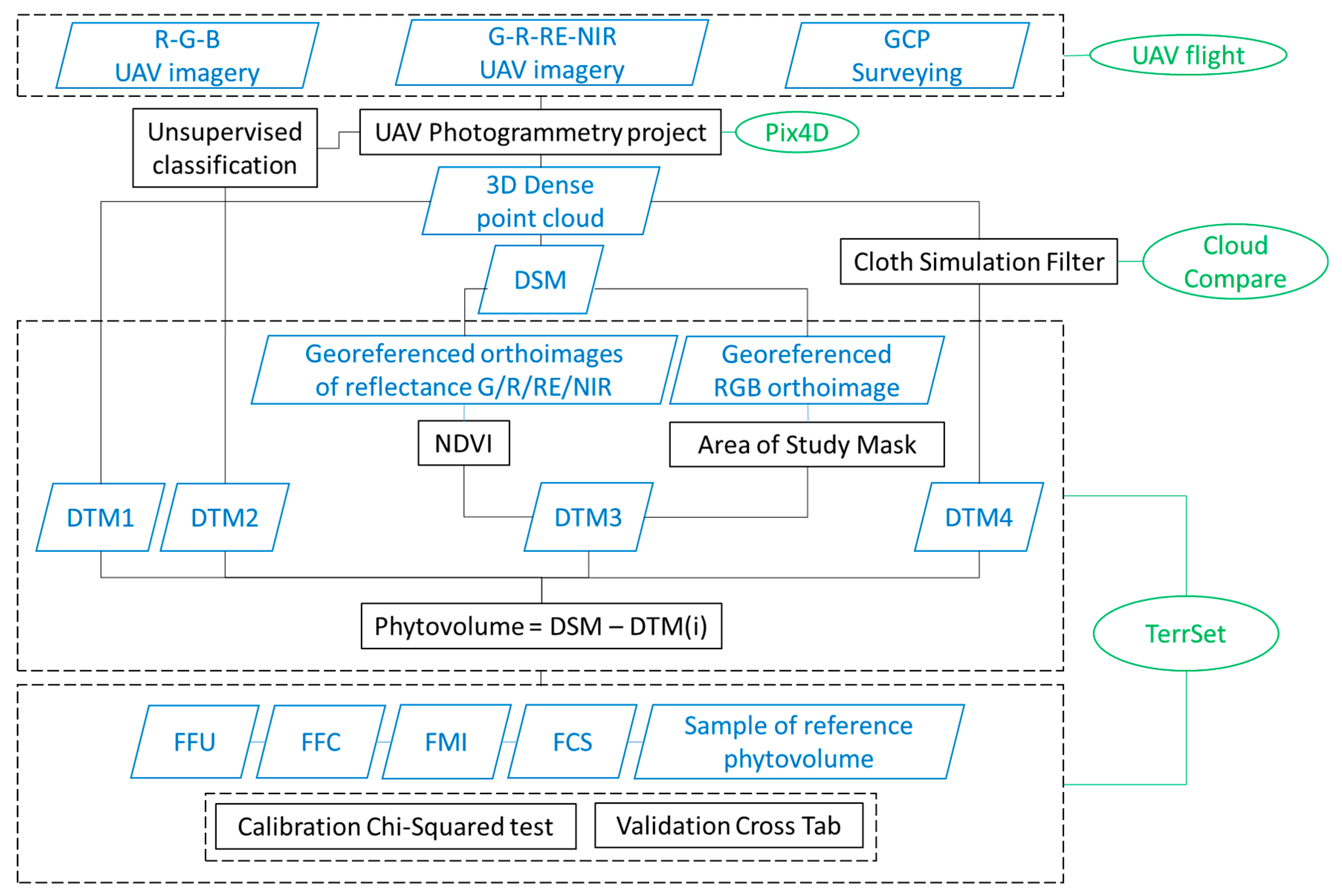
In the four methods compared in this paper, the DSM was derived from a UAV-photogrammetric project based on the SfM algorithm, and the four DTMs were based on the unclassified dense point cloud produced by a UAV-photogrammetric project (FFU), an unsupervised classified dense point cloud (FFC) [
34], a multispectral vegetation index (FMI), and a cloth simulation filter (FCS) [
35].
The input data for obtaining the four phytovolume maps included multispectral imagery with visible red edge, and near-infrared bands obtained from a UAV-photogrammetric flight and in situ sample data collected at the same time as the UAV flight. The flight was carried out in a Mediterranean shrubland located on the northern face of the Sierra de los Filabres, belonging to the siliceous territory of the Nevado–Filábride complex in the Almeria province of southern Spain.
The differences between the DTM obtained from the UAV-photogrammetric project and the four DTMs obtained from different criteria were expressed in terms of phytovolume maps and compared to find statistical differences between them. Qualitative and quantitative comparisons determined the ability of the four models to detect vegetation and to measure the apparent volume occupied by the vegetation groups. The corresponding four comparisons with in situ sample data determined the best estimator of phytovolume.
2.1. Study Area
The experimental plot was located on the northern face of the Sierra de los Filabres with geographic coordinates 37°18’35.30″N, 2°36’9.67″W (European Terrestrial Reference System 1989, ETRS89) (
Figure 1) in the Alcóntar municipality in the province of Almería (Spain), belonging to the Béticas mountain range [
36]. The forest is 5.5 km and 3.5 km from the Special Areas of Conservation of Calares de Sierra de Baza and Sierra de Baza, respectively, which are included in the European Natura 2000 Protected Areas Network [
37].
The climate in Sierra de los Filabres is classified as semi-arid Mediterranean with a short, warm, arid summer and a long, cold, dry winter. The annual average temperature is 13.9 °C, and the annual average precipitation is 444 mm. Precipitation is scarce and irregular, and pluriannual droughts are relatively frequent and intense.
The potential vegetation includes mid-mountain basophil holm oaks. Shrubs in regressive phase abound due to anthropogenic action on the territory, which is now abandoned, including old rain-fed crops, mining, and recent reforestation. The two most frequent species are gorse (Genista scorpius) and esparto grass (Macrochloa tenacissima), although some others appear in minor proportion, like Bupleurum falcatum, Helianthemum nummularium, Astragalus propinquus, and Retama sphaerocarpa L.
According to the Environmental Information Network of Andalusia (REDIAM) [
33], soils in the study area are classified as eutric cambisols, eutric regosols, and chromic luvisols with lithosols.
The total surface of the study area was 3.41 ha with an average elevation of 1288.46 m above sea level, ranging from 1233 m to 1240 m, and the average slope was 41.51%.
2.2. Unmanned Aerial Vehicle and Sensor
The UAV-photogrammetric flight was carried out on 17 December 2018, on a sunny day (
Figure 2).
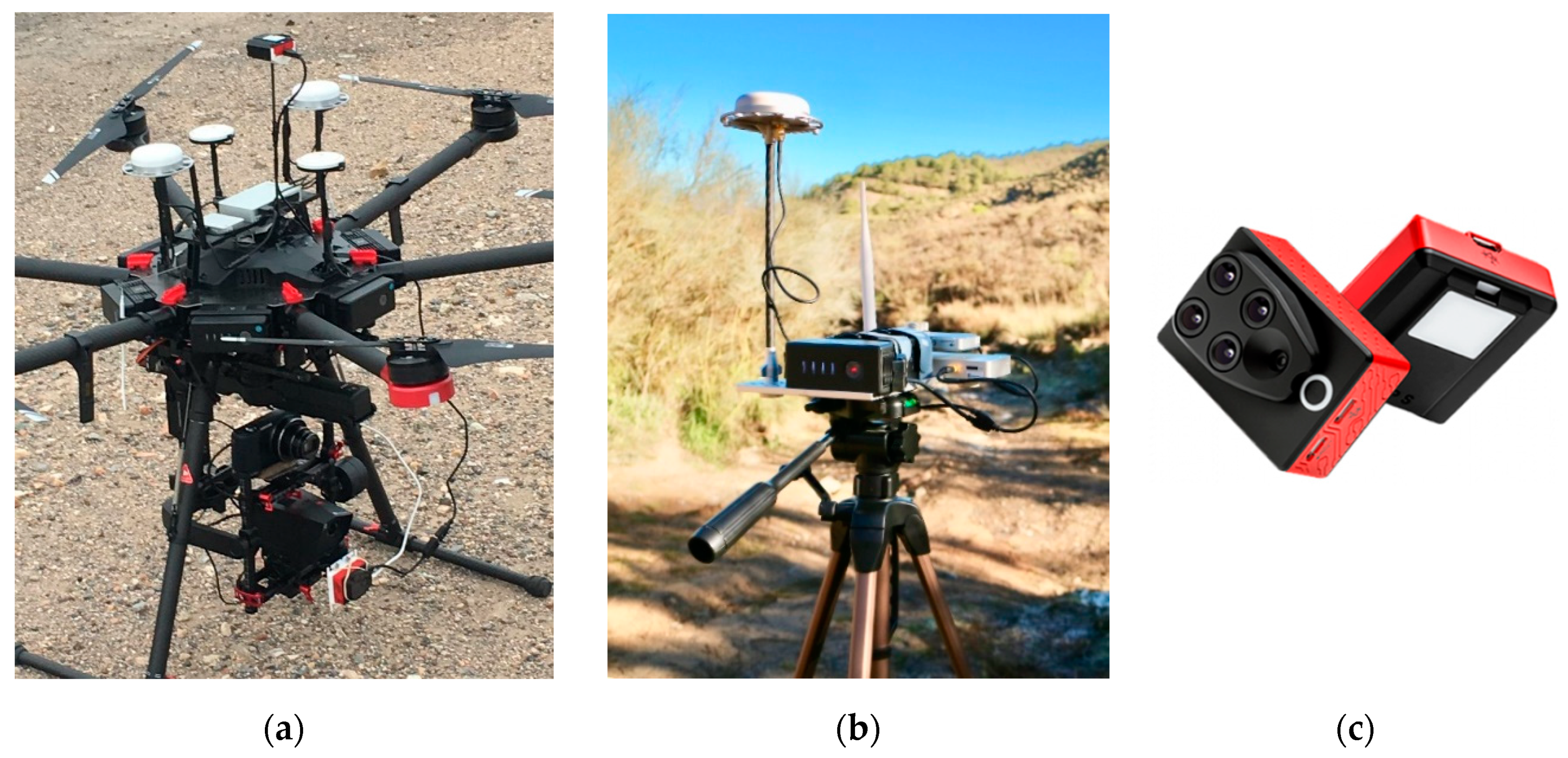
The UAV used in this work was equipped with a Parrot Sequoia multispectral camera [
38] mounted on a motion-compensated three-axis gimbal, and the chosen platform was a rotatory wing DJI Matrice 600 Pro UAV with six rotors (
Figure 3).
The Parrot Sequoia camera collects multispectral imagery that includes the green, red, red-edge, and near-infrared wavelengths through four 1.2-megapixel (1280 × 960) sensors (
Figure 3). The focal length of the four lenses is fixed at 4 mm, and horizontal and vertical FOVs of 61.9 and 48.5, respectively. When the flight height above ground level is 56 m, the average ground sample distance (GSD) is 3 cm. The camera also collects Red, Green and Blue (RGB) imagery with an integrated high-resolution 16-megapixel (4608 × 3456) sensor that reaches a 1.5 cm GSD at a 56 m flight height.
Light conditions in the same spectral bands as the multispectral sensor are captured by an irradiance sensor to collect irradiance during flight operations and correct possible fluctuations, calculating the absolute reflectance in post-processing.
UAV positioning is based on a differential real-time kinematic (d-RTK) device composed of a double antenna onboard the UAV, a base station that emits real-time corrections from land, and a GNSS triple-redundant antenna system. The horizontal and vertical positioning accuracies that can be achieved are 1 cm + 1 ppm and 2 cm + 1 ppm, respectively, and 1.3 degrees in orientation.
2.3. Flight Route Planning
Scale heterogeneity is one of the most important problems to solve in photogrammetry, especially when the flight altitude is low and the terrain to model is steep. In UAV-photogrammetry, the flight routes can be planned to maintain a constant distance over the terrain.
In this work, UgCS 3.0 PRO software [
39] was applied for designing a flight route with a constant 56.2 m altitude above ground level (AGL) (
Figure 4), based on a prospective low-resolution DSM previously processed with a UAV general flight.
A total of 1220 visible and multispectral images were acquired during the flight carried out with longitudinal and transversal overlaps of 70% and 55%, respectively, and a 23 min total flight time at 4 m/s. At the time of flights, the sun elevation ranged from 23.71° to 29.33°.
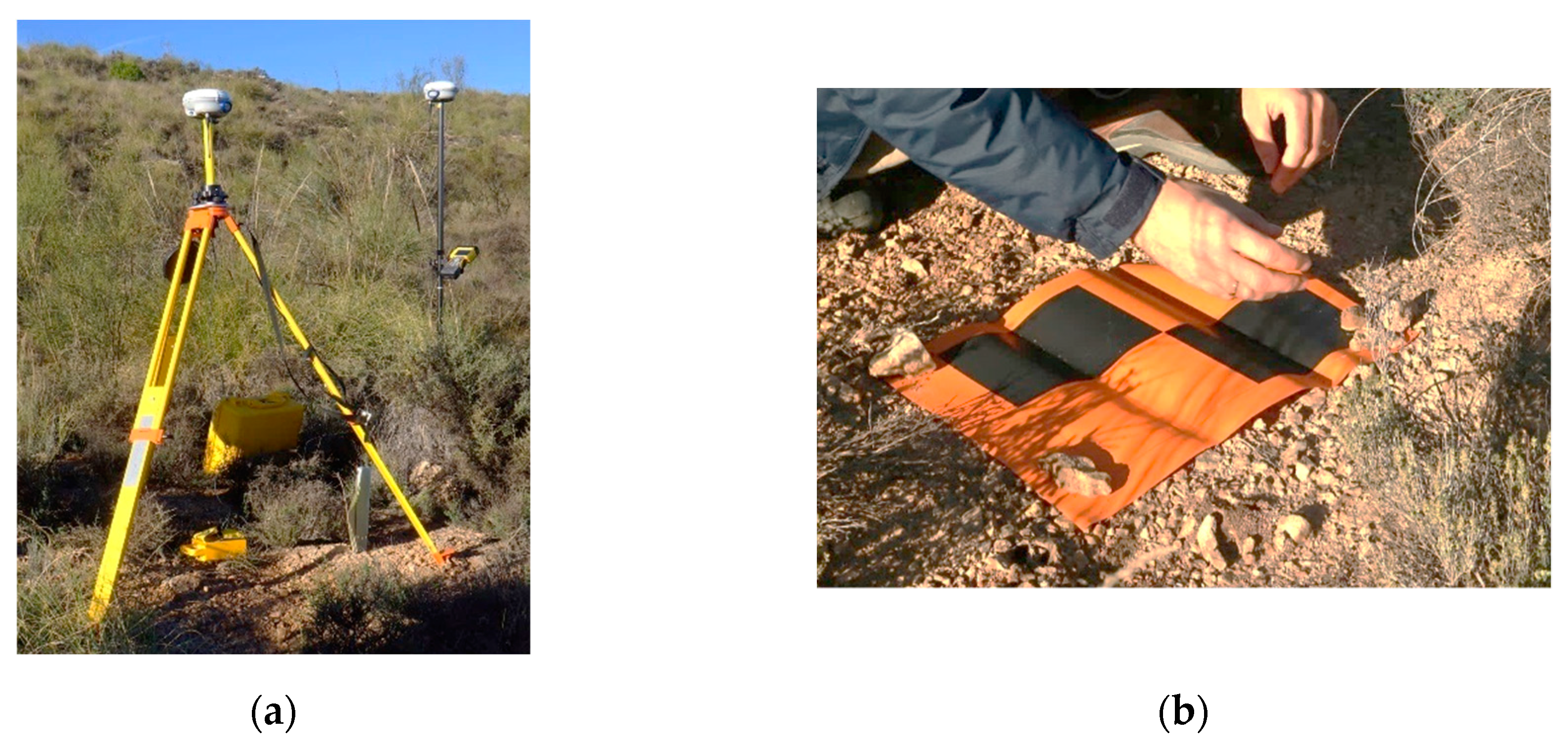
2.4. Survey Campaign
All the products obtained from the photogrammetric project, including DSM, DTM, and point cloud, must be referenced to the same coordinate system to be processed. The imagery co-registration and georeferencing was undertaken based on the ETRS89 coordinates of ten ground control points (GCPs) that were scattered on the study area following the recommendations of [
32,
40]. The three-dimensional (3D) coordinates of GCPs were measured with a very accurate device composed of a receptor Trimble R6 working in the post-processed kinematic (PPK) mode and a wayside base station (
Figure 5).
The post-processing of the measured coordinates of GCPs was undertaken by Trimble Real-Time eXtended (RTX) correction services [
41]. This high-accuracy global GNSS technology combines real-time data with positioning and compression algorithms that can reach a horizontal accuracy of up to 2 cm.
Horizontal coordinates were referenced to the official reference system in Spain, UTM 30 N (ETRS89), and elevations were referenced to MSL using the EGM08 geoid model.
2.5. Photogrammetric Algorithm
The UAV-photogrammetric project was undertaken with Pix4Dmapper Pro [
42] software using the input data from Sequoia, including three visible channels with 1.2 megapixels and four multispectral channels with 16 megapixels. Some of the most efficient photogrammetric algorithms in the UAV context involving RGB and multispectral imagery are SfM and MVS [
29,
30]. Pix4Dmapper Pro [
42] software implements these algorithms, and it was used in this work for image calibration, bundle adjustment, point cloud densification, DSM and DTM interpolation, and image orthorectification.
Blurred images were removed from the data set, and the EXIF data from all the images, which included the internal calibration parameters and coordinates of the principal points, were loaded before the calibration process. The radial and decentring distortion coefficients, focal length, and principal point coordinates were calibrated by iterative approximations for each of the sensors included in the camera.
Once the image calibration processes were completed, the iterative process of bundle adjustment was based on sets of tie points automatically identified by autocorrelation in the overlapped areas of the images. The number of overlapping images in all the locations of the study area must be enough to ensure the accuracy of the process.
The absolute geolocation of the photogrammetric block through the manual identification of the GCP coordinates in the images made it possible for all the photogrammetric products to have the same reference, including DSM, DTM, an RGB orthoimage and monochromatic reflectance orthorectified images, corresponding to each of the four channels.
2.6. Phytovolume Reference Data
According to some authors, e.g., [
4,
5,
43], in situ measurement of phytovolume is time-consuming and can even be unaffordable when the forest study area is inaccessible. In this study, reference data were obtained through a systematic sample that combined the well-known dry-weight rank and comparative yield methods. The evaluation of the four phytovolume estimators was carried out using statistical tests that compared the level of matching with the reference data.
The dry-weight rank method [
44] consists of ranking the species that contribute the most weight in all quadrats of each parcel. The result provides an estimation of the relative contribution of various species to the total biomass of a site expressed in percentage values. In each sampled quadrat, the first, second, third, and fourth most abundant species are determined, and ranks from one to four are assigned respectively. Once the sample is finished, the total of ranks per species is averaged, and the percentage of each species in the total biomass is obtained. By applying the apparent density obtained from the harvested quadrats in each parcel, combined with the comparative yield method [
45], phytovolume was deduced from total biomass and compared to the phytovolume estimation obtained by the four compared methods.
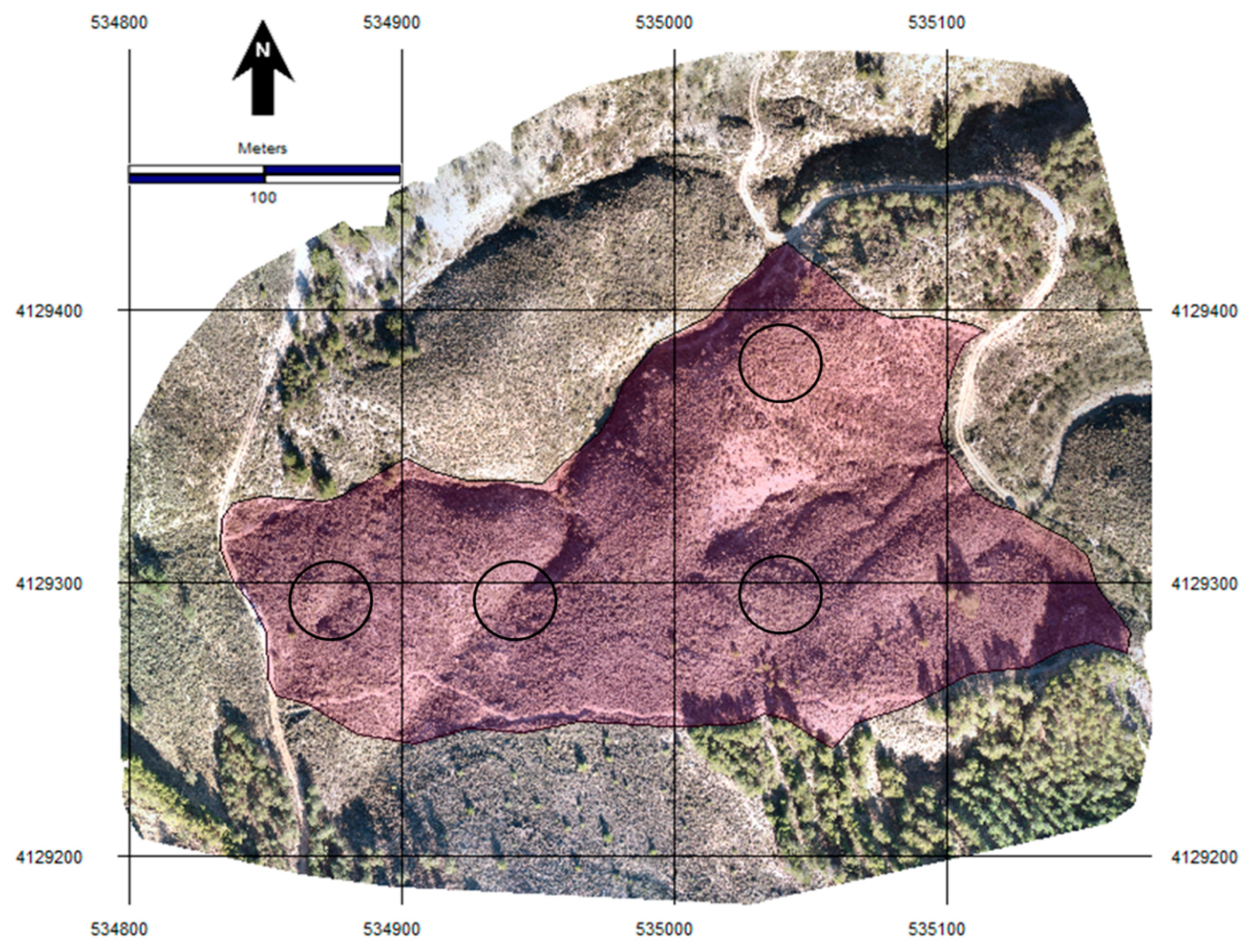
In this work, four circular parcels with a surface of 500 m
2 were distributed throughout the study area to characterise the species distribution (
Figure 2). Inside each of the parcels, ranks from one to four were established in 48 equidistant quadrats in the four cardinal directions, which implied a total of 768 sample points.
Furthermore, one 1 m2 parcel belonging to each of the four ranks was harvested, dried, and weighed in the laboratory for biomass–rank relationship calibration. The apparent density of each rank was calculated for biomass-to-phytovolume transformation.
2.7. Methods to Obtain DTMs
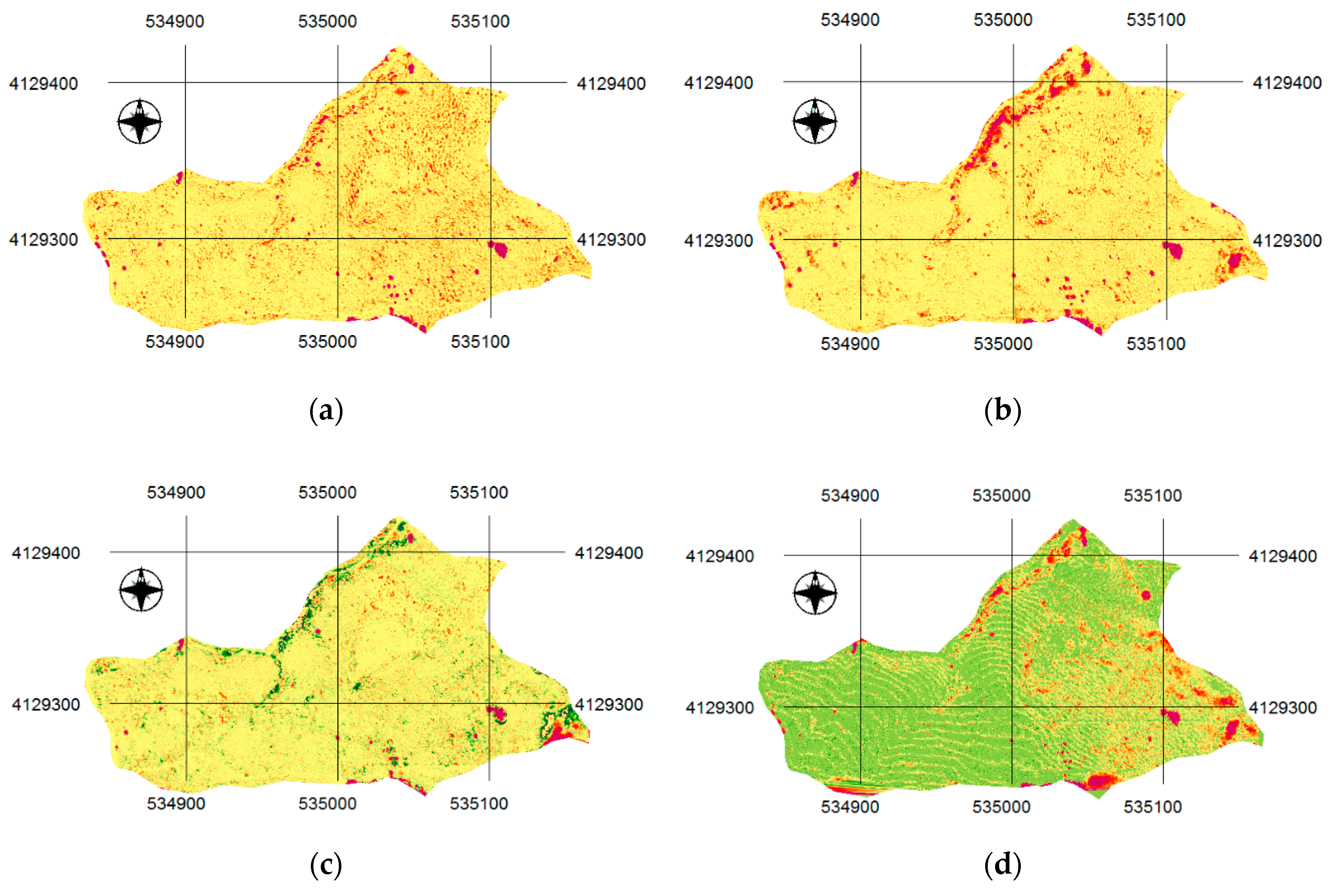
The estimates of phytovolume were obtained by taking the difference between the DSM produced by the UAV-photogrammetric project and four DTMs obtained in different ways. The DSM was regularly interpolated from the dense point cloud and represented the evolving surface to canopy and bare soil. If the points located at the canopy are excluded from the dense point cloud, the resting points can be considered located at bare soil and thus belong to the DTM that is finally interpolated. Three of the methods to obtain DTMs come from three different ways to separate the points of the cloud belonging to canopy and soil.
The point cloud produced by the photogrammetric project involves the vegetation masses and bare soil. In the phytovolume based on unclassified dense point cloud produced through the FFU method, the bare soil points are separated by attending exclusively to morphological criteria. A morphological analysis over the interpolated TIN from the point cloud was undertaken, detecting break lines where the gradient of the orientation of faces changed abruptly. All the points located between two consecutive break lines of relative minimum elevation are classified as soil. The interpolation of the obtained soil point cloud delivered the DTM, called FFU DTM in this case.
In the phytovolume based on the classified dense point cloud (FFC) method, semantic classes are detected by applying the unsupervised classification methods described by [
34] to the dense point cloud produced by UAV-photogrammetry. The classification is based on off-the-shelf machine learning and takes into account not only geometric features, but also the reflectance behaviour of the individual pixels. The point cloud classified as soil was interpolated obtaining the FFC DTM.
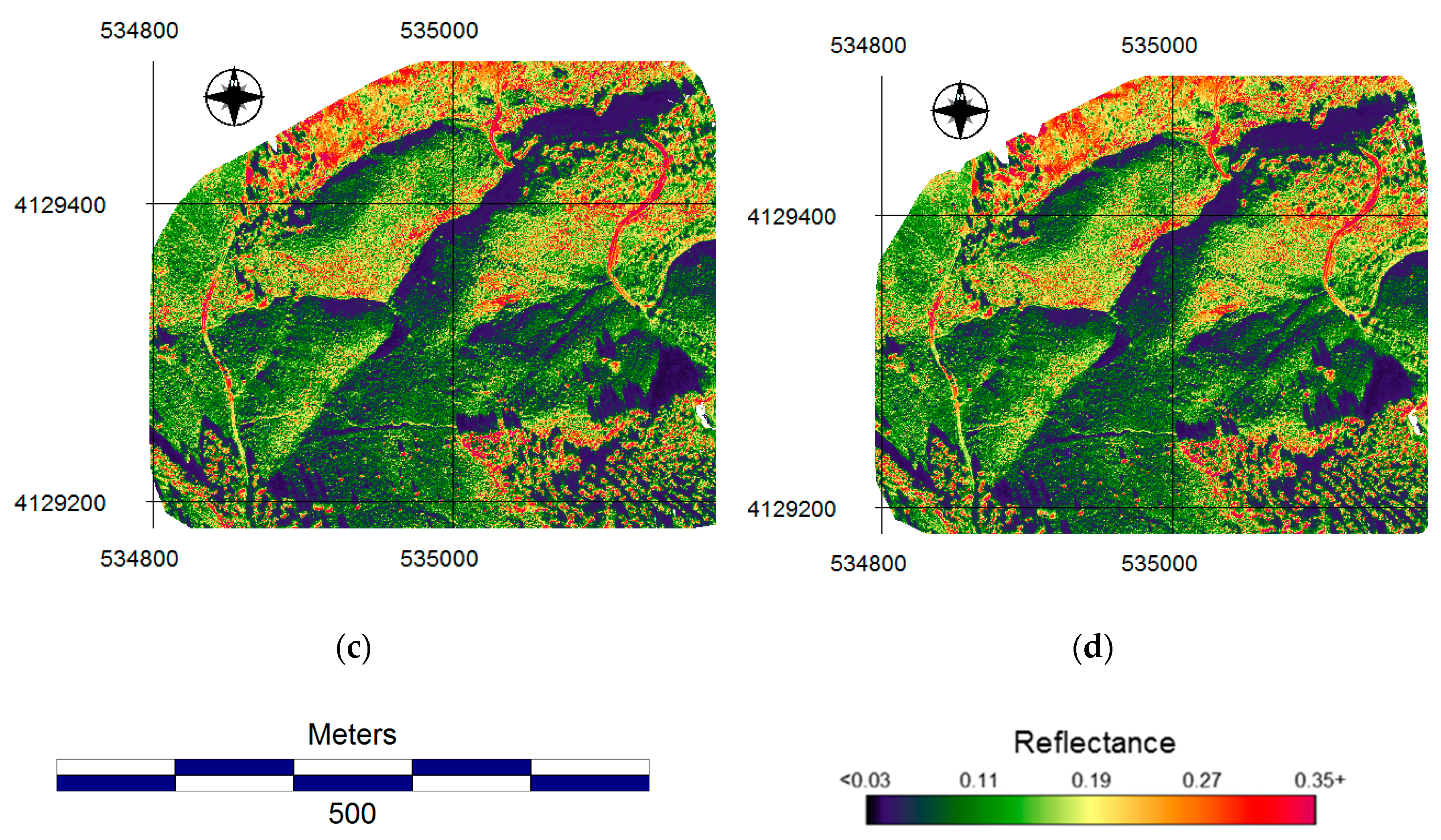
In the phytovolume based on the FMI method, extracting the vegetation point from the dense point cloud is undertaken using just radiometric criteria. The near-infrared (NIR) and red bands are used to calculate the well-known normalised vegetation index (NDVI). Using the NIR and red channels as input data, the NDVI was obtained using Equation (1), which represents the directly proportional relationship between photosynthetic activity of the plants and the difference between reflectance in the NIR and red bands due to the characteristic chlorophyll property of differential absorbance in both wavelengths.
To detect vegetation pixels in the study area, a sample of non-vegetation areas was statistically characterised. The sample size was close to 10% of the non-vegetation pixels of the study area. The maximum NDVI of the sample was used as a threshold to reclassify the NDVI map as vegetation. This process delivered a binary map containing vegetation and soil points, which was used to mask the vegetation points. Once the soil points were extracted, the FMI DTM was interpolated.
The fourth method for phytovolume estimation (FCS) is based on the cloth simulation filter for separate ground and non-ground points. This filter was originally designed by [
35] to extract ground points in discrete return LiDAR point clouds. It consists of a mathematic algorithm that inverts the DSM, and a rigid cloth covering the inverted surface is assimilated to the inverted DTM. Due to the cloth’s rigidity, it evolves to ground points, producing the FCS DTM.
According to the recommendations of [
40], the DTMs were interpolated by the inverse distance weighting method in the four cases with a power of two, searching kernels of 5 × 5 pixels and 2 cm pixel size.
2.8. Chi-Squared Test and Confusion Matrices
The accuracy of the vegetation detection is a prerequisite for reaching a good phytovolume estimate. Qualitative and quantitative comparisons [
46] determined the ability of the phytovolume estimators for vegetation detection and occupied volume, respectively.
The difference between DSM and each of the four DTMs must be close to zero in areas occupied by bare soil. Indirectly, vegetation masses are morphologically defined by all the grouped pixels with a certain height.
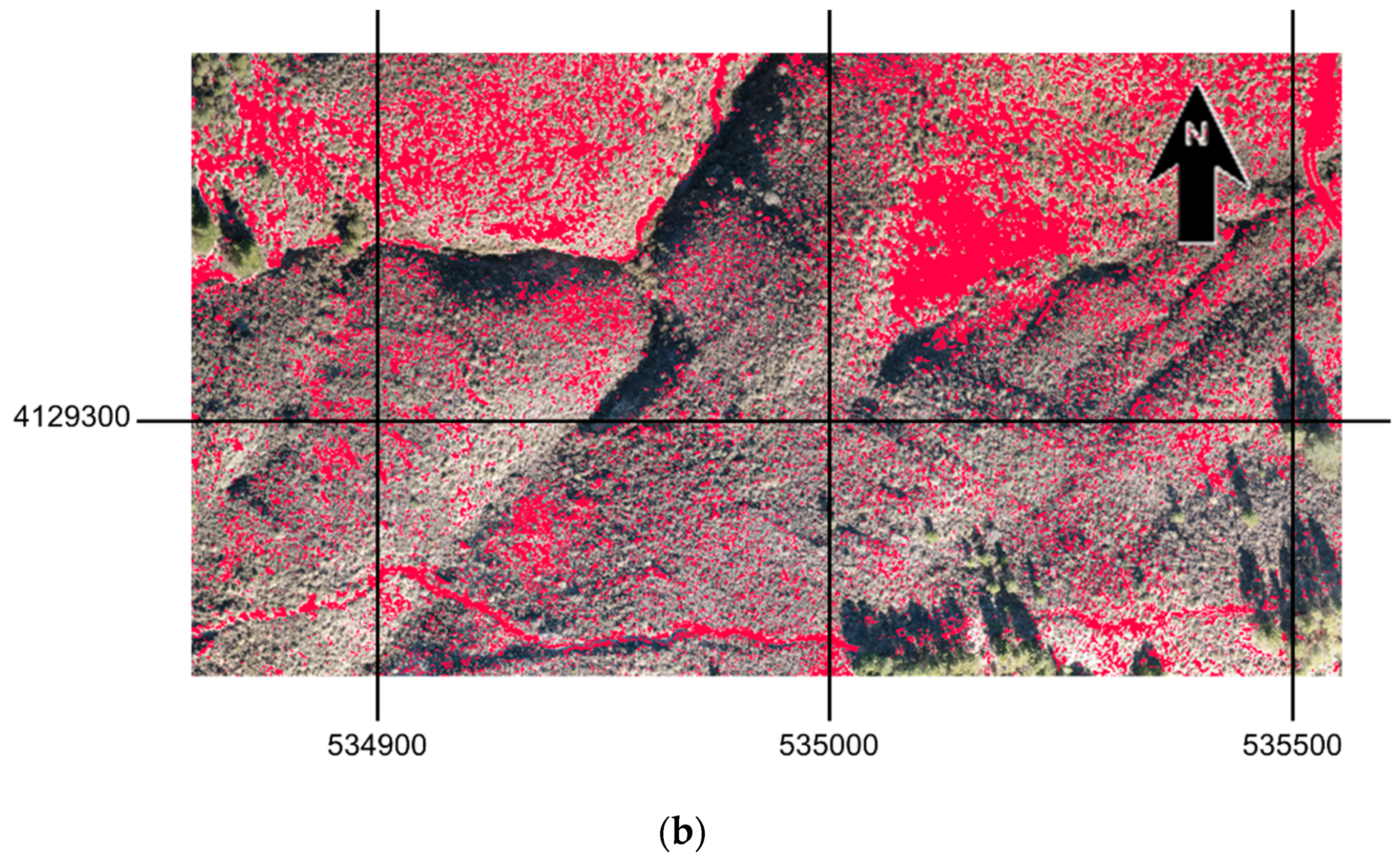
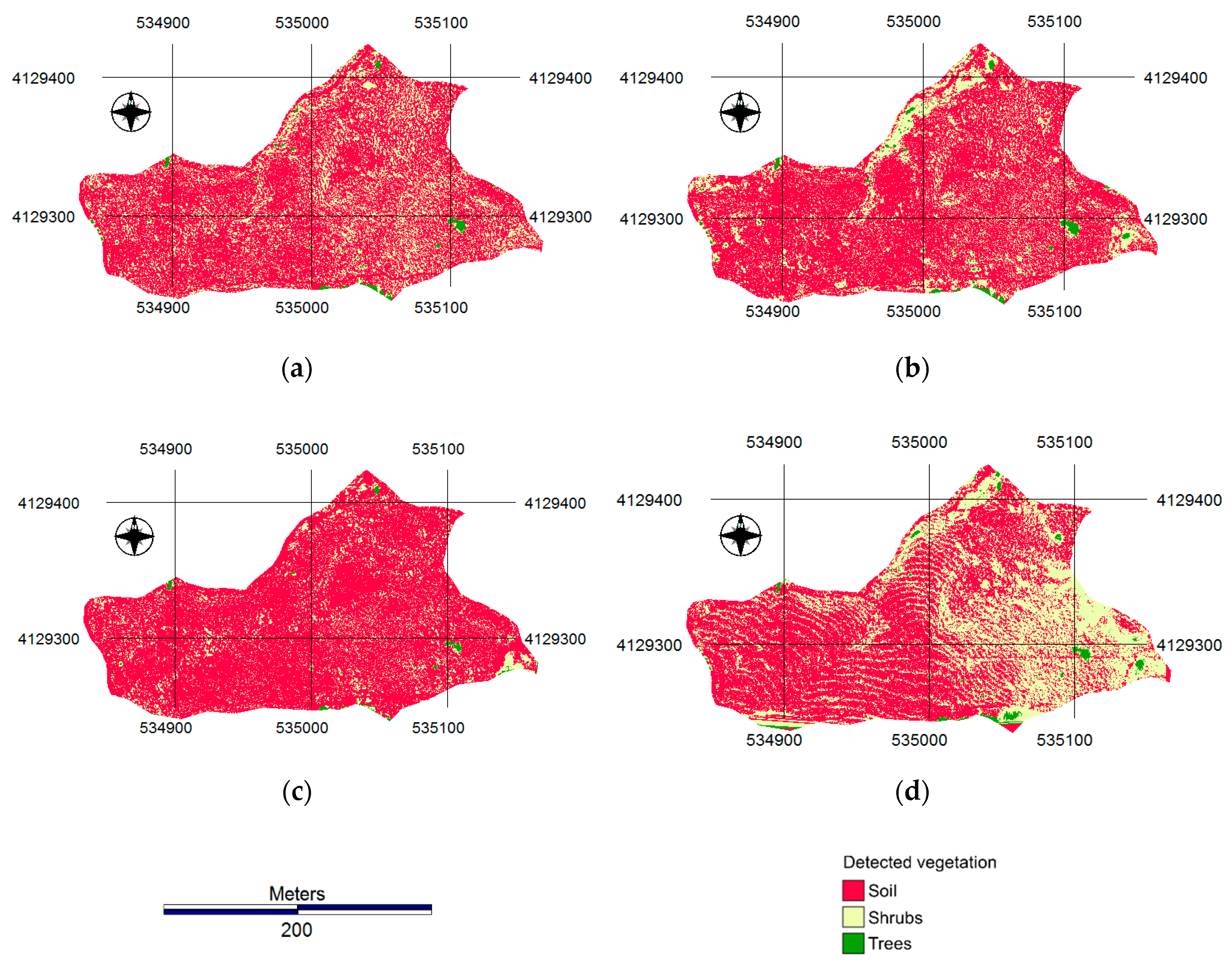
Once vegetation maps were obtained from four DTMs, two quantitative analyses were undertaken. First, the chi-squared test was applied to all the possible pairwise comparisons of vegetation areas obtained from phytovolume estimators to detect significant differences between them for vegetation area detection. Then, the four vegetation maps were compared to a vegetation map obtained by photointerpretation of the georeferenced RGB orthoimage using error matrix analysis to determine the accuracy of cross-tabulations expressed by the overall accuracy and kappa coefficient of agreement. The photointerpretation was completed by digitizing vegetated and non-vegetated areas observed in the orthoimage, after using a non-supervised classification process to assess the two most frequent classes in the study area.
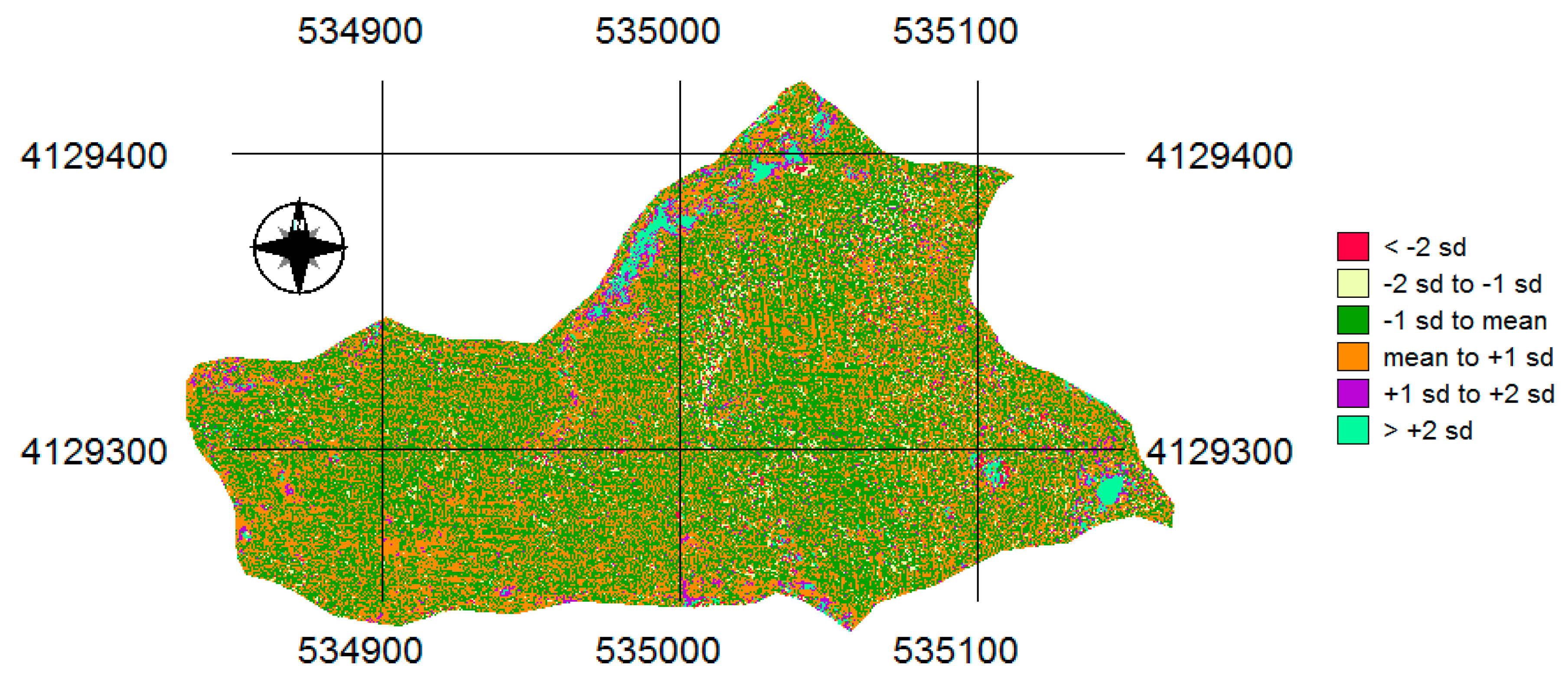
For the quantitative analysis to determine the phytovolume estimation ability, first, classified standardised difference images between all the possible pairwise estimators were obtained with z-scores divided into six classes. With these studies, the significant differences in phytovolume estimation were determined. Second, the error of each of phytovolume estimation was calculated, comparing the in situ observed phytovolume in sample quadrats to the phytovolume estimated at the same locations in terms of root-mean-square error (RMSE).
The flowchart shown in
Figure 6 summarises the methodology applied in this work.
2.9. UAV-Photogrammetric Products
A total of 242 visible images, about 99% of which were calibrated, and 968 multispectral images, 97% of which were calibrated, were processed. In the bundle adjustment process, a median of 76,600 key points per image were identified in the visible images dataset, and close to 53,530 keypoints were identified per multispectral image. All the visible and multispectral orthoimages produced were resampled to a GSD of 2 cm and georeferenced with an RMS error of 1.9 cm.
The shutter speed was constant and sufficient to reach a transversal and longitudinal overlap of 70% and 55%, respectively, distributed in 11 flight paths. Thus, all the pixels belonging to the study area were registered in at least five images.
Visible and multispectral sensors were post-calibrated based on the previous internal calibration by the manufacturer, including the distortion parameters, focal length, centre, and size of the sensors. For co-registration of the multispectral images, the camera models of the four channels were referenced to a unique reference using a median of 5089 matches between each pair of channels.
The photogrammetric project was referenced to the official coordinate system in Spain (ETRS89), UTM zone 30, northern hemisphere, using elevations with respect to MSL. The geoid model was EGM08, and the accuracies obtained from RTX post-processing were 1.8, 3.4, and 1.1 cm in the X, Y, and Z coordinates, respectively.
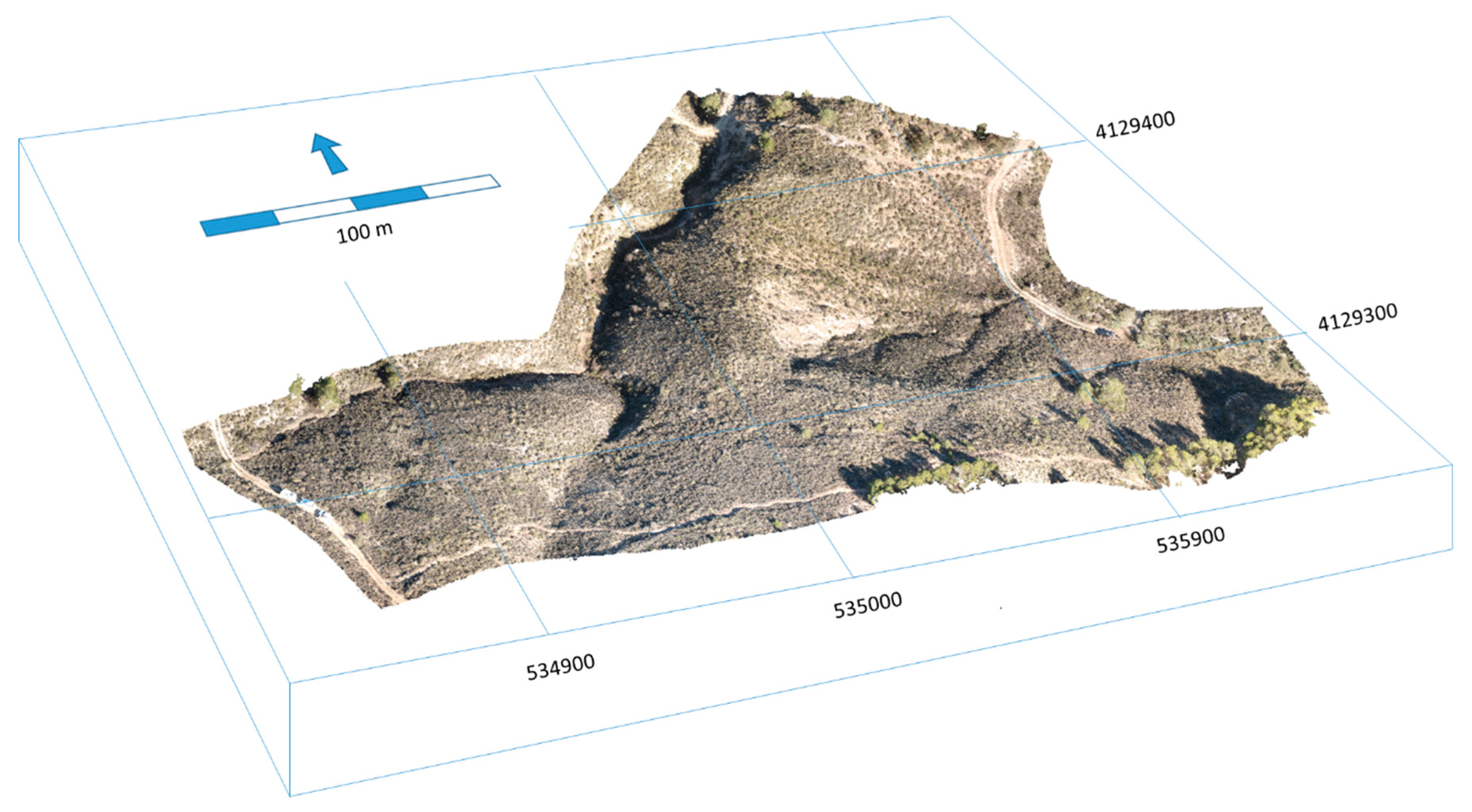
The first partial result obtained from the photogrammetric project was a dense point cloud (
Figure 7) composed of 25.13 million 3D points irregularly distributed, which implies an average density of 352.57 points/m
3.
By connecting all the points of the cloud, a TIN was generated by Poisson surface reconstruction [
47], which considers all the points at once, thus reducing data noise. The resulting TIN was composed of 12.7 million vertices and 25.3 million facets.
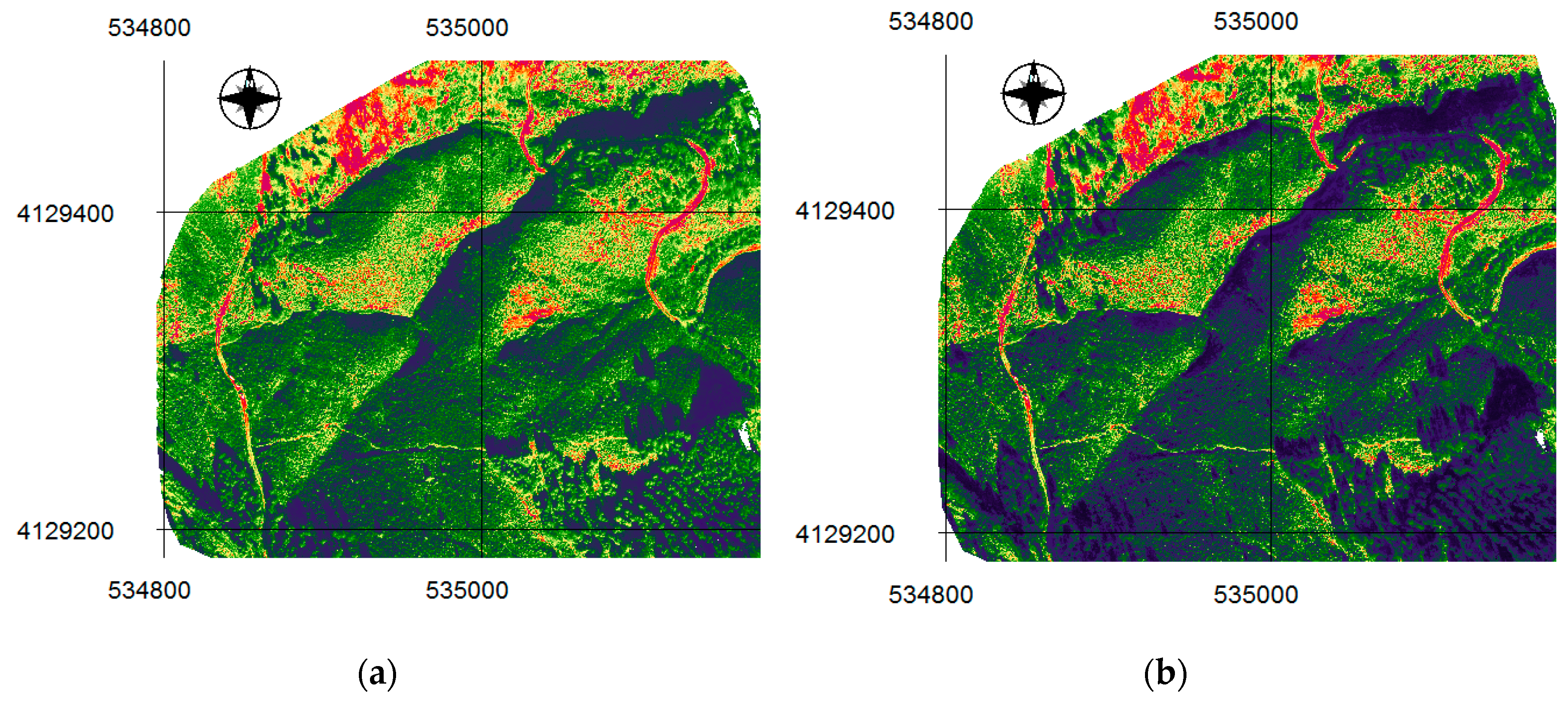
The DSM was obtained by applying an inverse distance weighting method to interpolate a regular 2 cm matrix that evolves to canopy and bare soil. Two filters were applied to remove noise and smooth the surface [
34,
42].
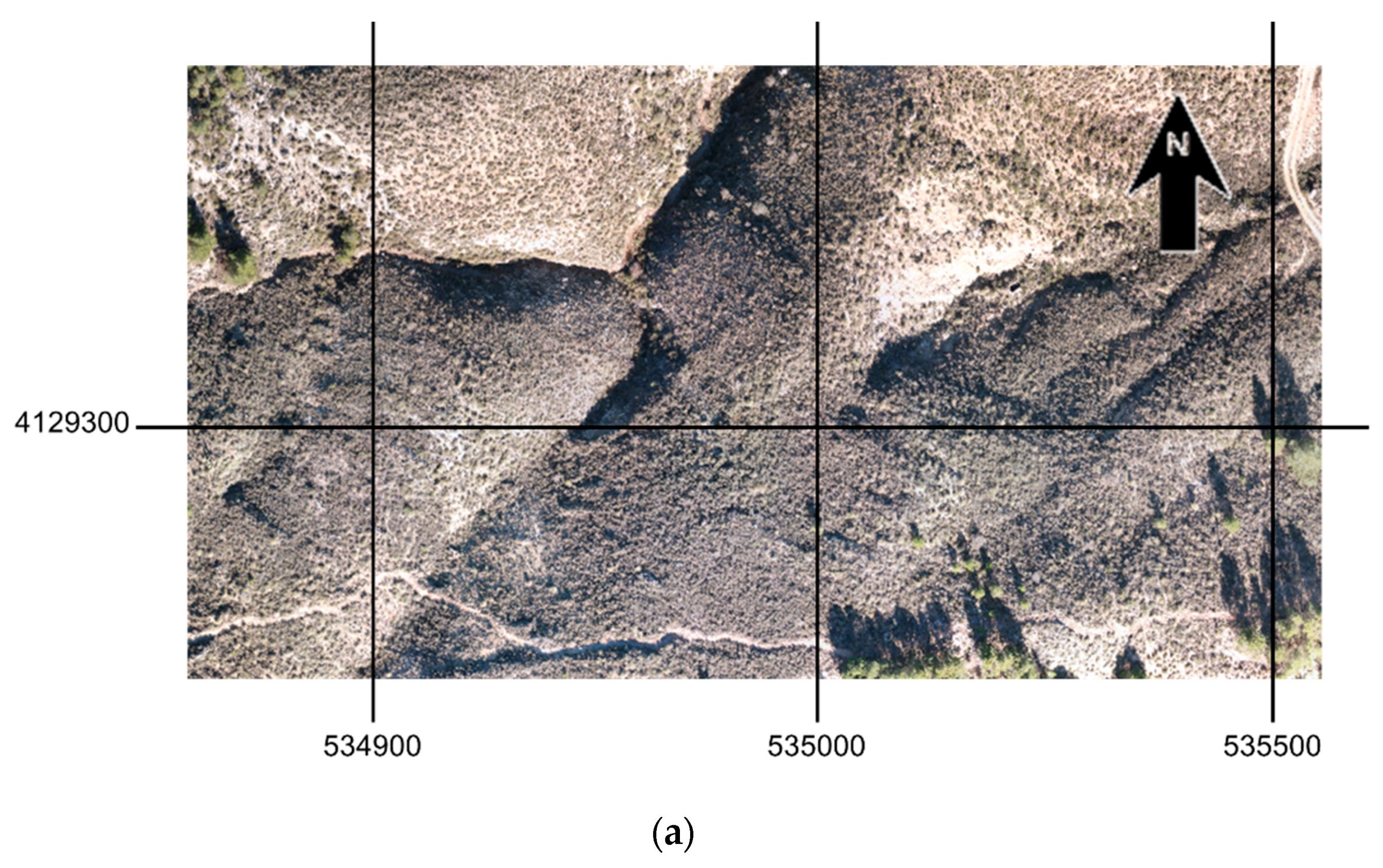
With this information, the RGB orthoimage and four orthoimages in reflectance units corresponding to the multispectral channels were orthorectified (
Figure 8). All these products were georeferenced and saved in GeoTIFF format.
4. Discussion
The order of magnitude of the global agreement obtained in this work was the same as in previous studies based on biomass estimations using LiDAR remote sensing [
3]. Some authors, like [
7], determined a global agreement of 76% to 85% when using fused satellite images with LiDAR for fuel-type detection. Logistic regression coefficients close to 70% for modelling fire danger based on satellite imagery were found by [
20]. With similar material used in the present work, several fire severity indices were evaluated by [
27] based on UAV data with a kappa of 0.536.
From a practical point of view, FFU and FFC obtain the DTMs from the photogrammetric project. However, while FFU does not need postprocessing, a dense point cloud classification process must be carried out in FFC. In order to automate the classification, an unsupervised algorithm based on the frequency of each class was applied, and five target classes were established. On the other hand, morphological analysis of the DSM for extracting DTMs in the cases of FFU and FFC is highly influenced by the scale factor, which has been described as a frequent source of error.
The main advantage of FMI comes from the vegetation index chosen, which is able to accurately detect vegetated areas. However, the need of near infrared information limits the use of UAV on-board cameras working on the visible spectrum. Furthermore, dead vegetation tends to be excluded from phytovolume estimation, although this effect was not significant in this work.
One of the main practical difficulties of FCS is setting the correct parameters of the mathematical model in each type of terrain. Results of FCS mainly depend on a threshold value to classify the point clouds into ground and non-ground parts, based on the distances between points and the simulated terrain. In future works, a sensibility analysis could establish the threshold value with better results, and supervised classifications could be applied to adapt the phytovolume estimation to each case of study. Particularly, pixel-based classification by Neural Network and Object Based Image Analysis could separate vegetated and non-vegetation areas with higher accuracy, and even recognition of individual species.
Using radar and satellite data, regression coefficients between 0.6 and 0.9 for biomass modelling were reported by [
18], and fuel-type maps from satellite data with an overall accuracy of 74% were calculated by [
19]. The novelty of the indirect estimations obtained in this study is related to the UAV data characteristics: High efficiency and flexibility to adapt the accuracy in each case. Compared to LiDAR, the volume of UAV data is lower. The manpower needed to obtain phytovolume estimation based on UAV data is lower than that of the manual sample, and UAV allows for work in forests with limited accessibility at a reasonable cost.
5. Conclusions
According to the obtained results in the Mediterranean forest in this work, FMI was the best phytovolume estimator, showing the lowest RMSE calculated with the in situ reference data observed at 768 sample sites grouped in four parcels of 500 m2.
The FMI model was the best for detecting vegetated areas, showing statistically significant differences, with respect to the other estimators at a confidence level of 95%.
Estimating the surface occupied by shrubs obtained from FFU, FFC and FCS were compared with FMI, concluding that FMI–FFU comparison presents the best similarity among all the possible pairwise comparisons.
In absolute terms, FMI is the method that best estimates the surface occupied by vegetation compared to the vegetation surface observed by photointerpretation and supervised classification.
In relative terms and considering all the possible pairwise comparisons of phytovolume estimation, differences between them are lower than two variances, except between FFU and FFC.
The use of FMI based on UAV data provides accurate phytovolume estimations that can be applied to several environment management activities, including wildfire prevention. Multitemporal phytovolume estimations could help to model the evolution of forest resources in a very realistic way.

 ,
, 


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}