Using Tree Detection Based on Airborne Laser Scanning to Improve Forest Inventory Considering Edge Effects and the Co-Registration Factor

Abstract
:1. Introduction
2. Materials and Methods
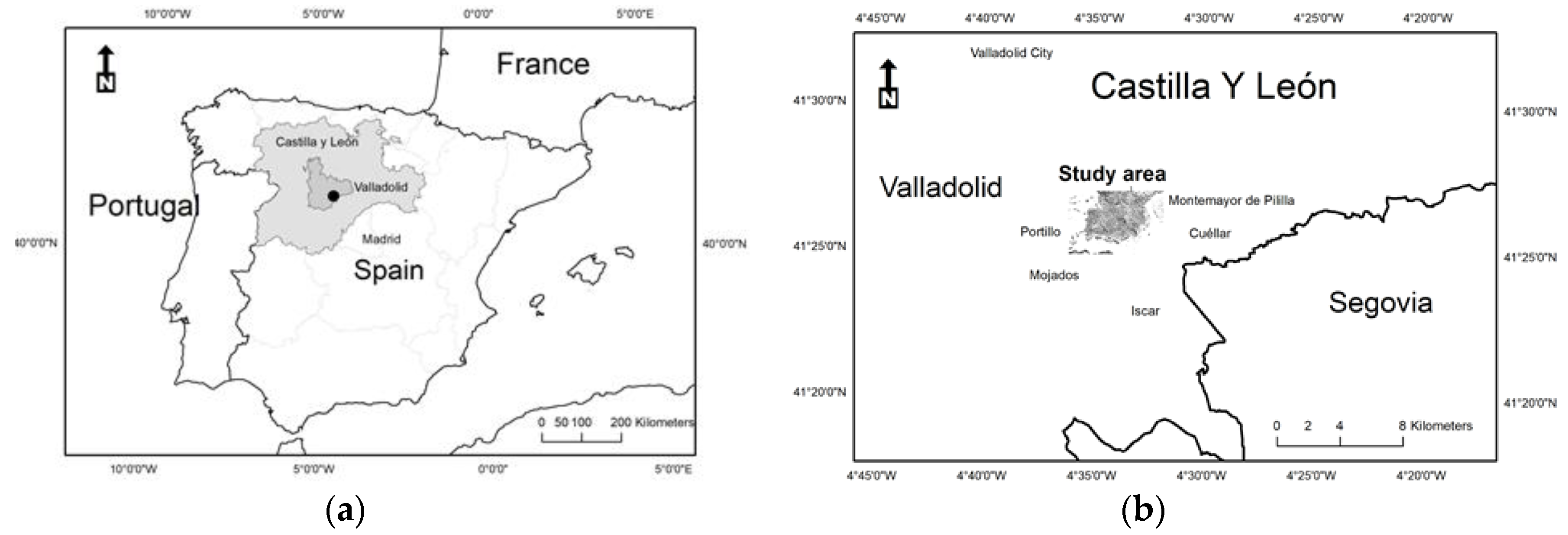
2.1. Study Area
2.2. Data
2.2.1. Ground Tree-Level Measurements
2.2.2. Data—ALS-Derived Metrics Assessment
2.3. Individual Tree Detection (ITD) and DBH Prediction
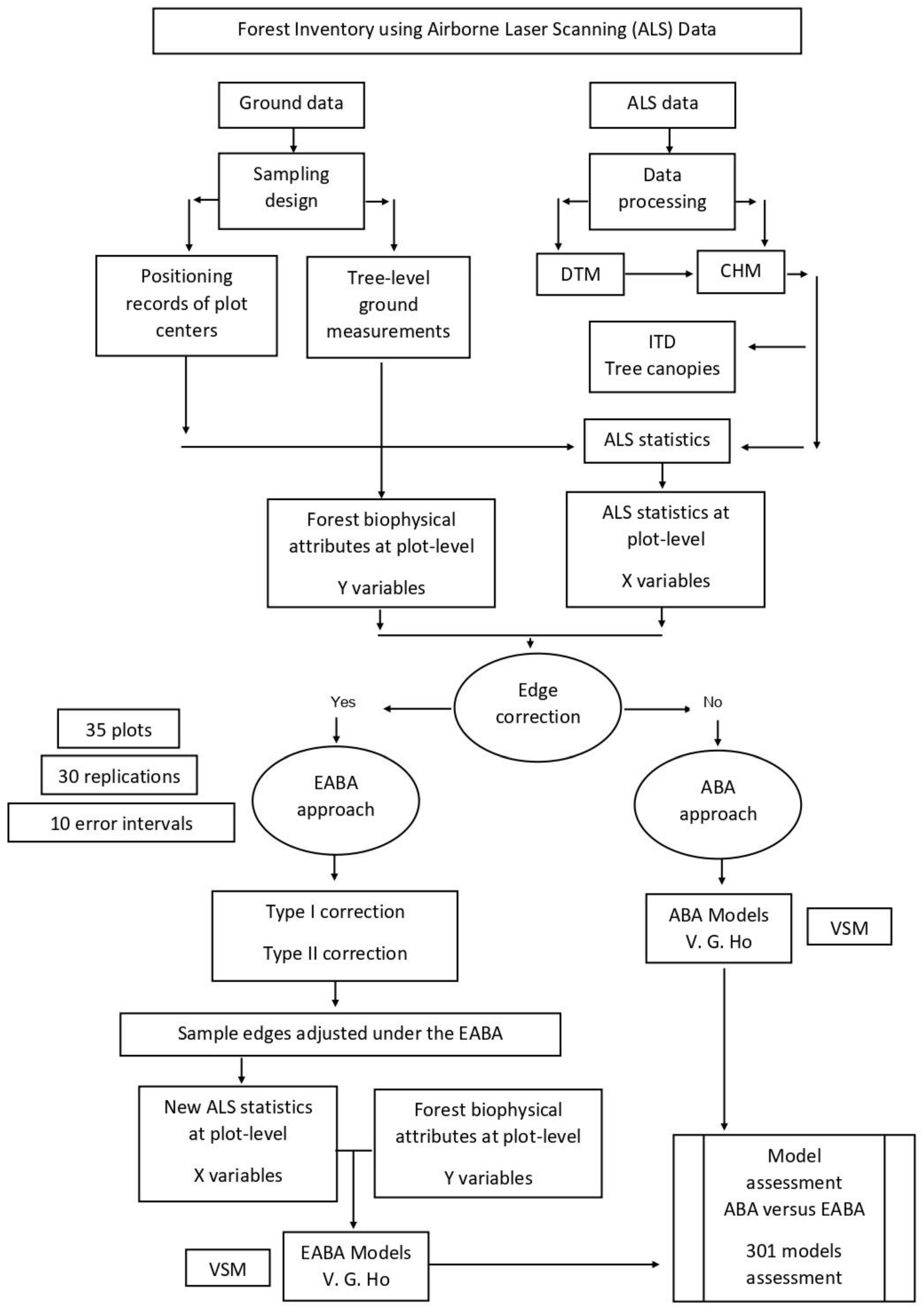
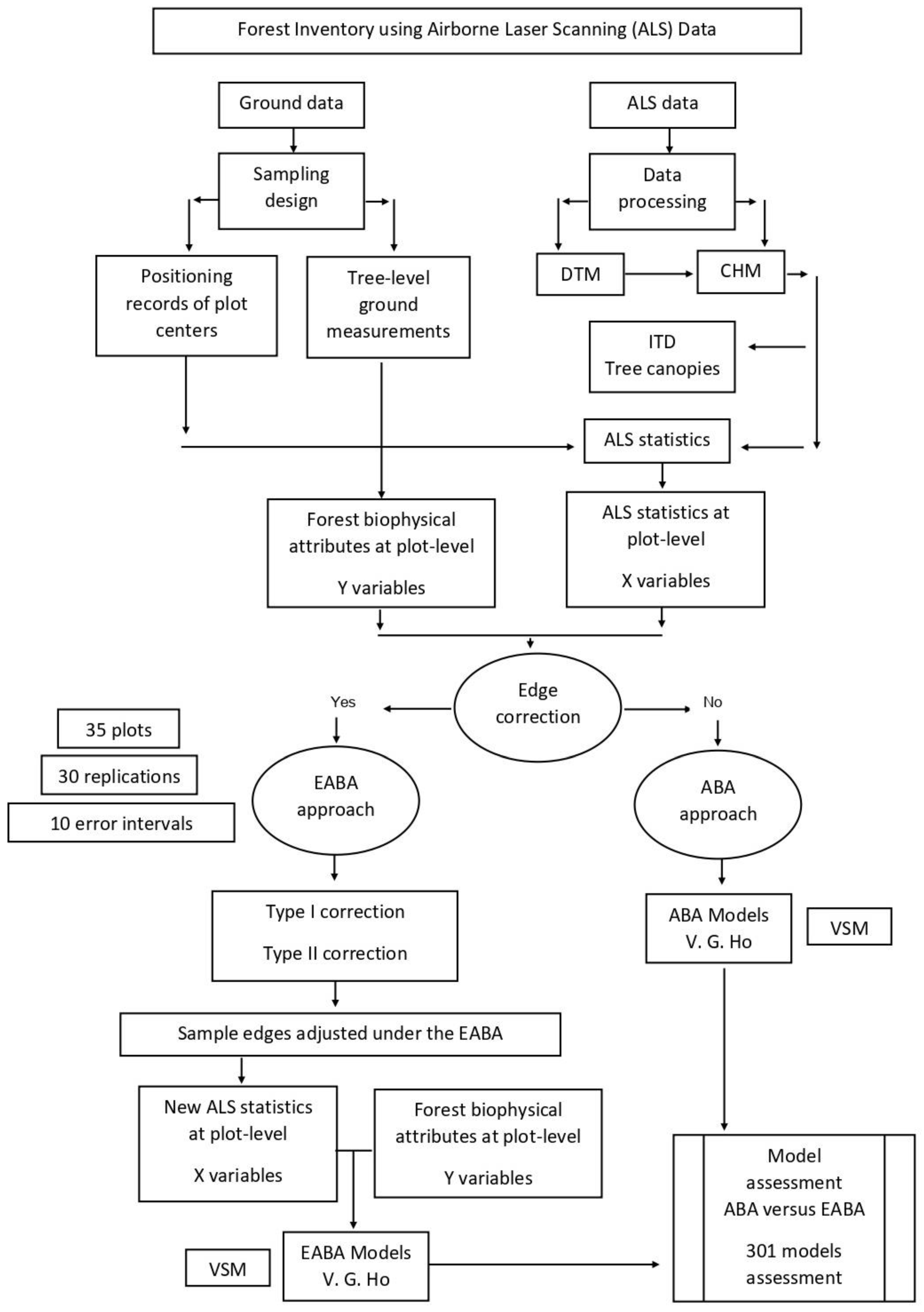
2.4. The Edge-Correction Method
- Type I. Inclusion error that refers to the situation in which the canopies of the measured trees are partially contained within the sample edge. The edge of the sample plot is corrected to follow the irregular pattern of the tree canopies included in the sampling. The sampled area increased compared to the ABA (Figure 3b).
- Type II. Exclusion error that refers to the case in which trees outside the sample edge are not measured but the canopy is partially contained within the sample plot. The edge of the sample is adjusted again from Type I correction by removing the canopy area that belongs to the trees located outside of the sample plot. In this way, ALS echoes corresponding to non-measured are remove for the computation of ALS statistics (Figure 3c).
- Coordinates and radius were used to create a buffer for each of the 301 plots.
- Detected trees corresponding to a ground measured tree were selected and their detected canopies were used to clip (area increment) the sample edge for ABA.
- Feature Type I was created.
- Non-measured trees whose centroid was located outside of Feature Type I were selected and their canopy area was removed from Feature Type I.
- Feature Type II was created.
2.5. Computation of Point Cloud Statistics
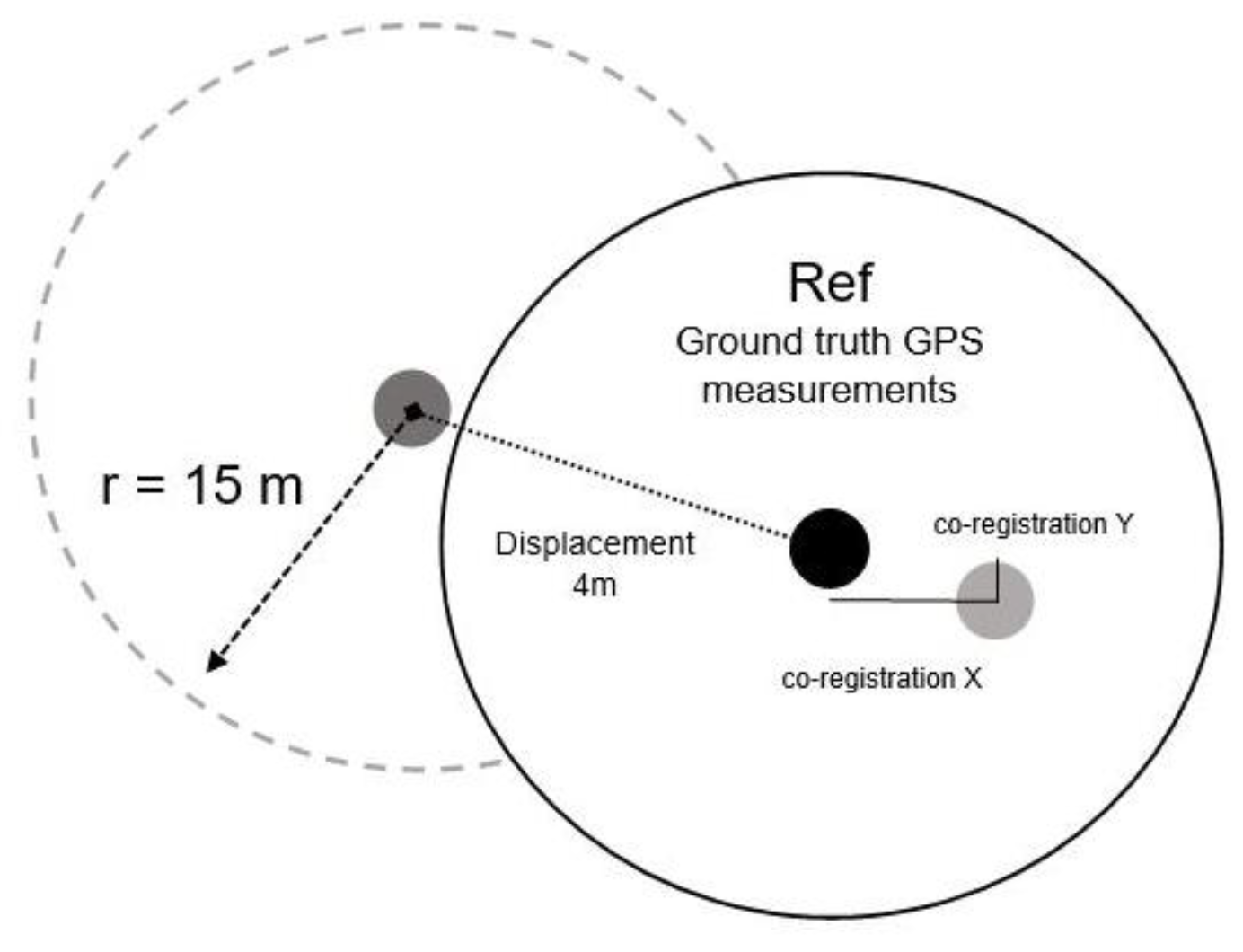
2.6. Simulation of Co-Registration Mismatch
2.7. Modelling
3. Results
3.1. Performance of ITD and DBH Prediction
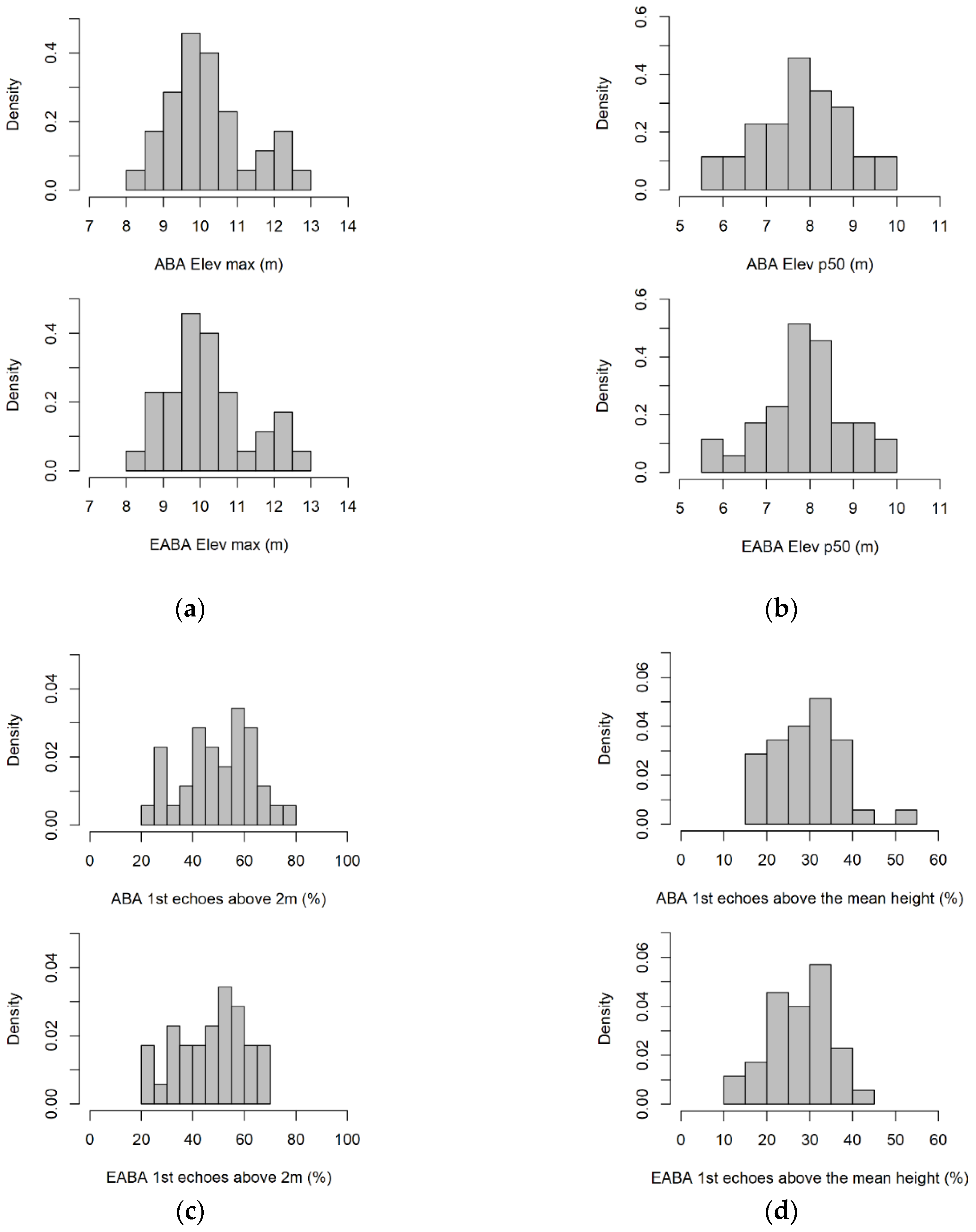
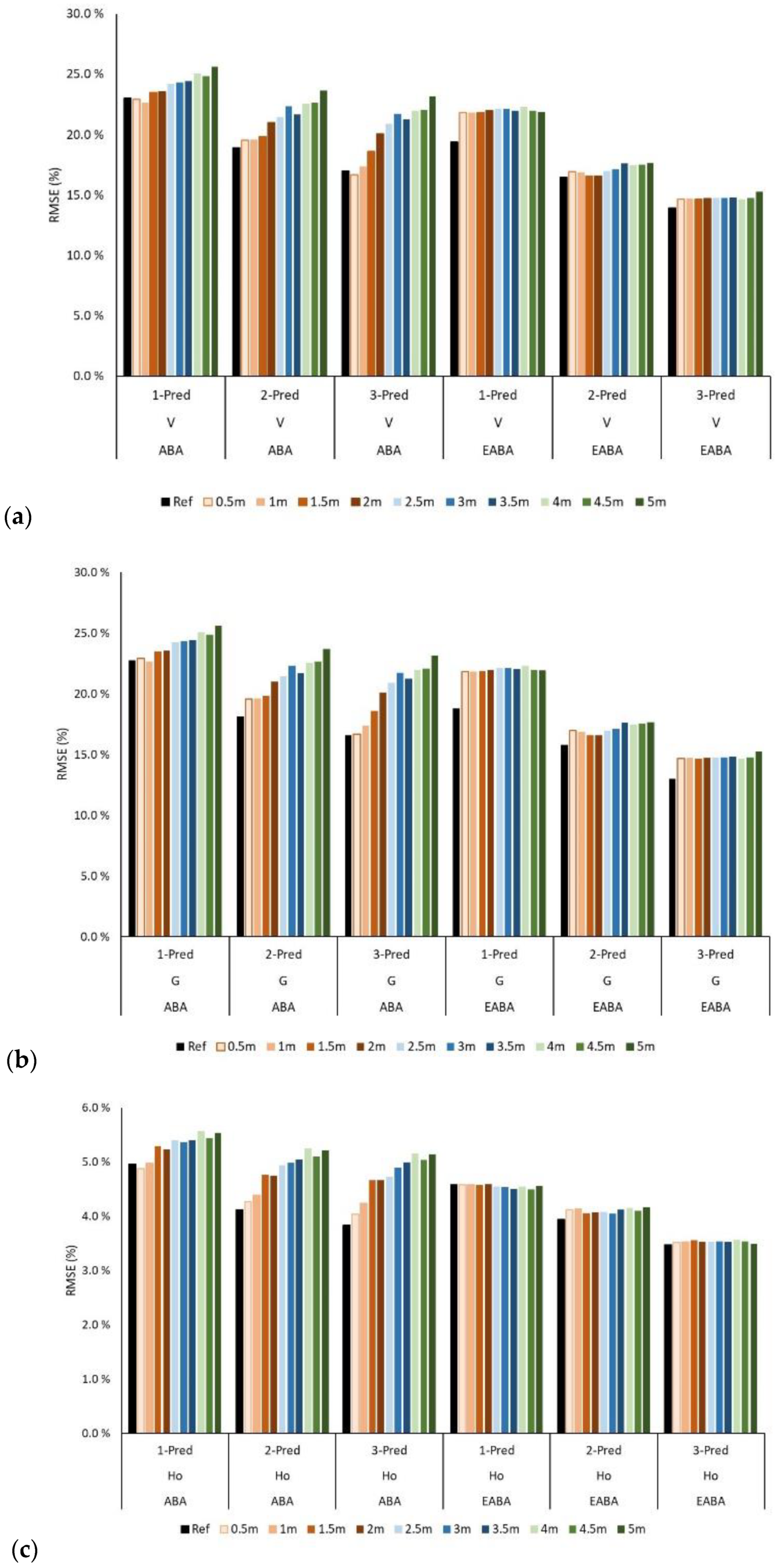
3.2. EABA Versus ABA Using Ground Truth Coordinates
3.3. Influence of Co-Registration Errors
4. Discussion
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Availability of Data and Materials
List of Abbreviations
| ALS | airborne laser scanning, |
| 3D | three dimensional, |
| ABA | area-based approach, |
| ITD | individual tree detection, |
| EABA | enhanced area-based approach; |
| CHM | canopy height model, |
| SfM | structure-from-motion, |
| DTM | Digital Terrain Model, |
| DBH | diameter at breast height, |
| RMSE | root mean square error, |
| VSM | variable selection methods, |
| DAP | Digital Aerial Photogrammetry; |
| TLS | terrestrial laser scanning. |
Appendix A
References
- White, J.C.; Coops, N.C.; Wulder, M.A.; Vastaranta, M.; Hilker, T.; Tompalski, P. Remote Sensing Technologies for Enhancing Forest Inventories: A Review. Can. J. Remote Sens. 2016, 42, 619–641. [Google Scholar] [CrossRef]
- Vauhkonen, J.; Ene, L.; Gupta, S.; Heinzel, J. Comparative testing of single-tree detection algorithms under different types of forest. Forestry 2011, 85, 27–40. [Google Scholar] [CrossRef]
- Næsset, E.; Bollandsås, O.M.; Gobakken, T. Comparing regression methods in estimation of biophysical properties of forest stands from two different inventories using laser scanner data. Remote Sens. Environ. 2005, 94, 541–553. [Google Scholar] [CrossRef]
- Koch, B.; Kattenborn, T.; Straub, C.; Vauhkonen, J. Segmentation of Forest to Tree Objects Barbara. In Forestry Applications of Airborne Laser Scanning: Concepts and Case Studies; Managing Forest Ecosystems 27; Maltamo, M., Naesset, E., Vauhkonen, J., Eds.; Springer ScienceCBusiness Media: Dordrecht, The Netherlands, 2014. [Google Scholar]
- Blázquez-Casado, A.; Calama, R.; Valbuena, M. Combining low-density LiDAR and satellite images to discriminate species in mixed Mediterranean forest. Ann. For. Sci. 2019, 76, 57. [Google Scholar] [CrossRef]
- Iglhaut, J.; Cabo, C.; Puliti, S. Structure from Motion Photogrammetry in Forestry: A Review. Curr. For. Rep. 2019, 5, 155–168. [Google Scholar] [CrossRef]
- Vauhkonen, J.; Pukkala, T. Selecting trees to be harvested based on the relative value growth of the remaining trees. Eur. J. For. Res. 2016, 135, 581–592. [Google Scholar] [CrossRef]
- Packalen, P.; Strunk, J.L.; Pitkänen, J.; Temesgen, H.; Maltamo, M. Edge-Tree Correction for Predicting Forest Inventory Attributes Using Area-Based Approach with Airborne Laser Scanning. IEEE J.-STARS 2015, 8, 1274–1280. [Google Scholar] [CrossRef]
- Breidenbach, J.; Næsset, E.; Gobakken, T. Improving k-nearest neighbor predictions in forest inventories by combining high and low density airborne laser scanning data. Remote Sens. Environ. 2012, 117, 358–365. [Google Scholar] [CrossRef]
- Mascaro, J.; Detto, M.; Asner, G.P.; Muller-landau, H.C. Remote Sensing of Environment Evaluating uncertainty in mapping forest carbon with airborne LiDAR. Remote Sens. Environ. 2011, 115, 3770–3774. [Google Scholar] [CrossRef]
- Gobakken, T.; Næsset, E. Assessing effects of positioning errors and sample plot size on biophysical stand properties derived from airborne laser scanner data. Can. J. For. Res. 2009, 39, 1036–1052. [Google Scholar] [CrossRef]
- Hasegawa, H.; Yoshimura, T. Estimation of GPS positional accuracy under different forest conditions using signal interruption probability. J. For. Res. 2008, 12, 1–7. [Google Scholar] [CrossRef]
- Frazer, G.W.; Magnussen, S.; Wulder, M.A.; Niemann, K.O. Simulated impact of sample plot size and co-registration error on the accuracy and uncertainty of LiDAR-derived estimates of forest stand biomass. Remote Sens. Environ. 2011, 115, 636–649. [Google Scholar] [CrossRef]
- Pascual, A.; Bravo, F.; Ordoñez, C. Assessing the robustness of variable selection methods when accounting for co-registration errors in the estimation of forest biophysical and ecological attributes. Ecol. Model. 2019, 403, 11–19. [Google Scholar] [CrossRef]
- Pascual, A.; Pukkala, T.; de-Miguel, S. Effects of Plot Positioning Errors on the Optimality of Harvest Prescriptions When Spatial Forest Planning Relies on ALS Data. Forests 2018, 9, 371. [Google Scholar] [CrossRef]
- Shin, J.; Temesgen, H.; Strunk, J.L.; Hilker, T. Comparing Modeling Methods for Predicting Forest Attributes Using LiDAR Metrics and Ground Measurements. Can. J. Remote Sens. 2016, 42, 739–765. [Google Scholar] [CrossRef]
- Liang, X.; Kukko, A.; Kaartinen, H.; Hyyppä, J. Possibilities of a Personal Laser Scanning System for Forest Mapping and Ecosystem Services. Sensors 2014, 14, 1228–1248. [Google Scholar] [CrossRef]
- Tompalski, P.; Coops, N.C.; Marshall, P.L.; White, J.C. Combining Multi-Date Airborne Laser Scanning and Digital Aerial Photogrammetric Data for Forest Growth and Yield Modelling. Remote Sens. 2018, 10, 347. [Google Scholar] [CrossRef]
- Rodríguez, F.; Lizarralde, I.; Bravo, F. Comparison of stem taper equations for eight major tree species in the Spanish Plateau. For. Syst. 2015, 24. [Google Scholar] [CrossRef]
- Calama, R.; Mutke, S.; Tomé, J.; Gordo, J.; Montero, G.; Tomé, M. Modelling spatial and temporal variability in a zero-inflated variable: The case of stone pine (Pinus pinea L.) cone production. Ecol. Model. 2011, 222, 606–618. [Google Scholar] [CrossRef]
- Axelsson, P. DEM generation from laser scanner data using adaptive TIN models. ISPRS 2000, 33, 111–118. [Google Scholar]
- Isenburg, M. LAStools-Efficient LiDAR Processing Software (Version 14101). 2018. Available online: http://rapidlasso.com/LAStools (accessed on 13 November 2019).
- McGaughey, R.J. FUSION/LDV: Software for LiDAR Data Analysis and Visualization; Version 3.30; U.S. Department of Agriculture Forest Service: Pacific Northwest Research Station: University of Washington: Seattle, WA, USA, 2018. Available online: http://forsys.cfr.washington.edu/fusion/fusionlatest.html (accessed on 13 November 2019).
- Conrad, O.; Bechtel, B.; Bock, M.; Dietrich, H. System for Automated Geoscientific Analyses (SAGA) v. 2.1.4. Geosci. Model. Dev. 2015, 8, 1991–2007. [Google Scholar] [CrossRef]
- Bi, H.; Fox, J.C.; Li, Y.; Lei, Y.; Pang, Y. Evaluation of nonlinear equations for predicting diameter from tree height. Can. J. For. Res. 2012, 42, 789–806. [Google Scholar] [CrossRef]
- ESRI. ArcGIS Desktop: Release 10; Environmental Systems Research Institute: Redlands, CA, USA, 2019. [Google Scholar]
- Gleason, C.J.; Im, J. Forest biomass estimation from airborne LiDAR data using machine learning approaches. Remote Sens. Environ. 2012, 125, 80–91. [Google Scholar] [CrossRef]
- Maltamo, M.; Naesset, E.; Vauhkonen, J. (Eds.) Forestry Applications of Airborne Laser Scanning: Concepts and Case Studies; Managing Forest Ecosystems 27; Springer Science+Business Media: Dordrecht, The Netherlands, 2014. [Google Scholar]
- R Development Core Team. R: A Language and Environment for Statistical Computing. R Foundation for Statistical Computing; R Core Team: Vienna, Austria, 2018; Available online: https://www.R-project.org/ (accessed on 13 November 2019).
- Lumley, T.; Miller, A. Leaps: Regression Subset Selection. R Package. 2017. Available online: https://CRAN.R-project.org/package=leaps (accessed on 13 November 2019).
- Kotivuori, E.; Korhonen, L.; Packalen, P. Nationwide airborne laser scanning based models for volume, biomass and dominant height in Finland. Silva Fenn. 2016, 50, 1–28. [Google Scholar] [CrossRef]
- Moser, P.; Vibrans, A.C.; McRoberts, R.E.; Næsset, E. Methods for variable selection in LiDAR-assisted forest inventories. Forestry 2017, 90, 112–124. [Google Scholar] [CrossRef]
- Holopainen, M.; Mäkinen, A.; Rasinmäki, J.; Hyytiäinen, K.; Bayazidi, S.; Piëtila, I. Comparison of various sources of uncertainity in stand-level present value estimates. For. Policy Econ. 2010, 12, 377–386. [Google Scholar] [CrossRef]
- Khorrami, R.; Naeimi, Z.; Tabari, M. A new method for detecting individual trees in aerial LiDAR point clouds using absolute height maxima. Environ. Monit. Assess. 2018, 190, 708. [Google Scholar] [CrossRef]
- Yu, X.; Hyyppä, J.; Vastaranta, M.; Holopainen, M.; Viitala, R. Predicting individual tree attributes from airborne laser point clouds based on the random forests technique. ISPRS 2010, 66, 28–37. [Google Scholar] [CrossRef]
- Duncanson, L.I.; Cook, B.D.; Hurtta, G.C.; Dubayah, R.O. An efficient, multi-layered crown delineation algorithm for mapping individual tree structure across multiple ecosystems. Remote Sens. 2014, 154, 378–386. [Google Scholar] [CrossRef]
- Falkowski, M.J.; Smith, A.M.S.; Gessler, P.E.; Hudak, A.T.; Vierling, L.A.; Evans, J.S. The influence of conifer forest canopy cover on the accuracy of two individual tree measurement algorithms using lidar data. Can. J. Remote Sens. 2008, 34, 338–350. [Google Scholar] [CrossRef]
- Kukunda, C.B.; Duque-Lazo, J.; González-Ferreiro, E.; Thaden, H.; Kleinn, C. Ensemble classification of individual Pinus crowns from multispectral satellite imagery and airborne LiDAR. Int. J. Appl. Earth Obs. 2018, 65, 12–23. [Google Scholar] [CrossRef]
- Estornell, J.; Ruiz, L.A.; Velázquez-Martí, B.; Hermosilla, T. Analysis of the factors affecting LiDAR DTM accuracy in a steep shrub area. Int. J. Digit. Earth 2011, 4, 521–538. [Google Scholar] [CrossRef] [Green Version]
- Johnson, C.E.; Barton, C.C. Where in the world are my field plots? Using GPS effectively in environmental field studies. Front. Ecol. Environ. 2004, 2, 475–482. [Google Scholar] [CrossRef]
- Sigrist, P.; Coppin, P.; Hermy, P. Impact of forest canopy on quality and accuracy of GPS measurements. Int. J. Remote Sens. 1999, 20, 3595–3610. [Google Scholar] [CrossRef]
- Packalen, P.; Strunk, J.; Packalen, T.; Maltamo, M.; Mehtätalo, L. Resolution dependence in an area-based approach to forest inventory with airborne laser scanning. Remote Sens. Environ. 2019, 224, 192–201. [Google Scholar] [CrossRef]
- Holmgren, J. Prediction of tree height, basal area and stem volume using airborne laser scanning. Scand. J. For. Res. 2004, 19, 543–553. [Google Scholar] [CrossRef]
- Hyyppä, J.; Hyyppä, H.; Leckie, D.; Gougeon, F.; Yu, X.; Maltamo, M. Review of methods of small-footprint airborne laser scanning for extracting forest inventory data in boreal forests. Int. J. Remote Sens. 2008, 29, 1339–1366. [Google Scholar] [CrossRef]
- Mauro, F.; Monleon, V.J.; Temesgen, H.; Ruiz, L.A. Analysis of spatial correlation in predictive models of forest variables that use LiDAR auxiliary information. Can. J. For. Res. 2017, 7, 788–799. [Google Scholar] [CrossRef] [Green Version]
- Saarela, S.; Holm, S.; Grafström, A. Hierarchical model-based inference for forest inventory utilizing three sources of information. Ann. For. Sci. 2016, 73, 895. [Google Scholar] [CrossRef] [Green Version]
- Goodbody, T.; Coops, N.C.; White, J.C. Digital Aerial Photogrammetry for Updating Area-Based Forest Inventories: A Review of Opportunities, Challenges, and Future Direction. Curr. For. Rep. 2019, 5, 55–75. [Google Scholar] [CrossRef] [Green Version]
- Guerra-Hernández, J.; Cosenza, D.N.; Estraviz-Rodriguez, L.C.; Silva, M.; Tomé, M.; Díaz-Varela, R.A.; González-Ferreiro, E. Comparison of ALS- and UAV(SfM)-derived high-density point clouds for individual tree detection in Eucalyptus plantations. Int. J. Remote Sens. 2018, 39, 5211–5235. [Google Scholar] [CrossRef]
- Fekety, P.A.; Falkowski, M.J.; Hudak, A.T.; Jain, T.B.; Evans, J.S. Transferability of Lidar-derived Basal Area and Stem Density Models within a Northern Idaho Ecoregion. Can. J. Remote Res. 2018, 44, 131–143. [Google Scholar] [CrossRef]
- Domingo, D.; Alonso, R.; Lamelas, M.T.; Montealegre, A.L.; Rodríguez, F.; de la Riva, J. Temporal Transferability of Pine Forest Attributes Modeling Using Low-Density Airborne Laser Scanning Data. Remote Sens. 2019, 11, 261. [Google Scholar] [CrossRef] [Green Version]
- St-Onge, B.; Vepakomma, U. Assessing forest gap dynamics and growth using multi-temporal laser-scanner data. ISPRS Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2004, XXXVI, 173–178. [Google Scholar]
- Aguirre, O.; Hui, G.Y.; Gadow, K.; Jiménez, J. An analysis of spatial forest structure using neighbourhood-based variables. For. Ecol. Manag. 2003, 183, 137–145. [Google Scholar] [CrossRef]
- Pommerening, A.; Stoyan, D. Edge-correction needs in estimating indices of spatial forest structure. Can. J. For. Res. 2006, 36, 1723–1739. [Google Scholar] [CrossRef] [Green Version]
- Wing, B.M.; Boston, K.; Ritchie, M.W. A Technique for Implementing Group Selection Treatments with Multiple Objectives Using an Airborne Lidar-Derived Stem Map in a Heuristic Environment. For. Sci. 2019, 65, 211–222. [Google Scholar] [CrossRef]
- Moskal, L.M.; Zheng, G. Retrieving Forest Inventory Variables with Terrestrial Laser Scanning (TLS) in Urban Heterogeneous Forest. Remote Sens. 2005, 4, 1–20. [Google Scholar] [CrossRef] [Green Version]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Variable | Min | Mean | Max |
|---|---|---|---|
| DBH (cm) | 9.0 | 33.0 | 68.0 |
| h (m) | 3.5 | 9.7 | 13.8 |
| N (trees ha−1) | 64.0 | 129.2 | 292.0 |
| G (m2 ha−1) | 5.2 | 11.9 | 18.4 |
| H0 (m) | 8.9 | 11.2 | 13.8 |
| Parameters | Estimate | Std. Error | t Value |
|---|---|---|---|
| a | 4.9098 | 0.3922 | <2 × 10−16 |
| b | 2.3281 | 0.0959 | <2 × 10−16 |
| RMSE (%) | ABA | EABA | ||||
|---|---|---|---|---|---|---|
| Models | 1-pred | 2-pred | 3-pred | 1-pred | 2-pred | 3-pred |
| V | Hmax | Hmax | Hmax | FCmean_1 | FCmean_1 | FCmean_1 |
| 23.1 | H95 | H95 | 19.4 | Hmean | FCmean_All | |
| 18.2 | Hmode | 16.5 | Hmode | |||
| 17.0 | 13.9 | |||||
| G | Hmax | Hmax | Hmax | FCmean_1 | FCmean_1 | FCmean_1 |
| 22.7 | H95 | H95 | 18.8 | Hmean | Hmean | |
| 18.2 | Hmean | 15.8 | FCmean_All | |||
| 16.5 | 13.0 | |||||
| Ho | Hmax | Hmax | Hmax | H80 | FCmean_1 | H80 |
| 5.0 | H10 | H10 | 4.6 | H90 | H60 | |
| 4.1 | FCmode_All | 3.9 | H10 | |||
| 3.8 | 3.5 | |||||
© 2019 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pascual, A. Using Tree Detection Based on Airborne Laser Scanning to Improve Forest Inventory Considering Edge Effects and the Co-Registration Factor. Remote Sens. 2019, 11, 2675. https://doi.org/10.3390/rs11222675
Pascual A. Using Tree Detection Based on Airborne Laser Scanning to Improve Forest Inventory Considering Edge Effects and the Co-Registration Factor. Remote Sensing. 2019; 11(22):2675. https://doi.org/10.3390/rs11222675
Chicago/Turabian StylePascual, Adrián. 2019. "Using Tree Detection Based on Airborne Laser Scanning to Improve Forest Inventory Considering Edge Effects and the Co-Registration Factor" Remote Sensing 11, no. 22: 2675. https://doi.org/10.3390/rs11222675
APA StylePascual, A. (2019). Using Tree Detection Based on Airborne Laser Scanning to Improve Forest Inventory Considering Edge Effects and the Co-Registration Factor. Remote Sensing, 11(22), 2675. https://doi.org/10.3390/rs11222675