High-Resolution Spaceborne, Airborne and In Situ Landslide Kinematic Measurements of the Slumgullion Landslide in Southwest Colorado



Abstract
:
1. Introduction
2. Data and Methods
2.1. In Situ GNSS
2.2. Dense Pixel Offsets
2.2.1. High-Resolution SAR
2.2.2. Lidar-Derived Shaded Relief
2.2.3. UAS-Derived Shaded Relief
3. Results
3.1. In Situ GNSS
3.2. SAR Offsets
3.3. Lidar/UAS Offsets
4. Discussion
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Varnes, D.J.; Savage, W.Z. The Slumgullion Earth Flow; a Large-Scale Natural Laboratory; USGPO: Washington, DC, USA, 1996.
- Parise, M.; Guzzi, R. Volume and Shape of the Active and Inactive Parts of the Slumgullion Landslide, Hinsdale County, Colorado; US Geological Survey: Reston, VI, USA, 1992.
- Fleming, R.W.; Baum, R.L.; Giardino, M. Map and Description of the Active Part of the Slumgullion Landslide, Hinsdale County, Colorado; US Department of the Interior, US Geological Survey: Reston, VI, USA, 1999.
- Parise, M. Observation of surface features on an active landslide, and implications for understanding its history of movement. Nat. Hazards Earth Syst. Sci. 2003, 3, 569–580. [Google Scholar] [CrossRef] [Green Version]
- Schuster, R. Landslide dams in the western United States. In Proceedings of the IVth International Conferenceand Field Workshop on Landslides, Tokyo, Japan, 23–31 August 1985; pp. 411–418. [Google Scholar]
- Delbridge, B.G.; Burgmann, R.; Fielding, E.; Hensley, S.; Schulz, W.H. Three-dimensional surface deformation derived from airborne interferometric UAVSAR: Application to the Slumgullion Landslide. J. Geophys. Res. Solid Earth 2016, 121, 3951–3977. [Google Scholar] [CrossRef]
- Coe, J.A.; Ellis, W.L.; Godt, J.W.; Savage, W.Z.; Savage, J.E.; Michael, J.A.; Kibler, J.D.; Powers, P.S.; Lidke, D.J.; Debray, S. Seasonal movement of the Slumgullion landslide determined from Global Positioning System surveys and field instrumentation, July 1998–March 2002. Eng. Geol. 2003, 68, 67–101. [Google Scholar] [CrossRef]
- Mohlenbrock, R.H. Slumgullion Slide, Colorado. Nat. Hist. 1989, 98, 34–37. [Google Scholar]
- Gomberg, J.; Bodin, P.; Savage, W.; Jackson, M.E. Landslide Faults And Tectonic Faults, Analogs—The Slumgullion Earthflow, Colorado. Geology 1995, 23, 41–44. [Google Scholar] [CrossRef]
- Chleborad, A.F.; Diehl, S.F.; Cannon, S.H. Geotechnical properties of selected materials from the Slumgullion Landslide in The Slumgullion Earth Flow: A Large-scale Natural Laboratory. US Geol. Surv. Bull. 1996, 2130, 35–39. [Google Scholar]
- Diehl, S.F.; Schuster, R.L.; Varnes, D.; Savage, W. Preliminary geologic map and alteration mineralogy of the main scarp of the Slumgullion Landslide in The Slumgullion Earth Flow: A Large-scale Natural Laboratory. US Geol. Surv. Bull. 1996, 2130, 13–19. [Google Scholar]
- Schulz, W.H.; Kean, J.W.; Wang, G.H. Landslide movement in southwest Colorado triggered by atmospheric tides. Nat. Geosci. 2009, 2, 863–866. [Google Scholar] [CrossRef]
- Baum, R.; Reid, M. Ground water isolation by low-permeability clays in landslide shear zones. In Proceedings of the 8th International Symposium on Landslides in Research, Theory and Practice, Cardiff, UK, 26–30 June 2000; pp. 139–144. [Google Scholar]
- Bennett, G.L.; Roering, J.J.; Mackey, B.H.; Handwerger, A.L.; Schmidt, D.A.; Guillod, B.P. Historic drought puts the brakes on earthflows in Northern California. Geophys. Res. Lett. 2016, 43, 5725–5731. [Google Scholar] [CrossRef] [Green Version]
- Handwerger, A.L.; Roering, J.J.; Schmidt, D.A. Controls on the seasonal deformation of slow-moving landslides. Earth Planet. Sci. Lett. 2013, 377, 239–247. [Google Scholar] [CrossRef]
- Jiang, Y.A.; Liao, M.S.; Zhou, Z.W.; Shi, X.G.; Zhang, L.; Balz, T. Landslide Deformation Analysis by Coupling Deformation Time Series from SAR Data with Hydrological Factors through Data Assimilation. Remote Sens. 2016, 8, 179. [Google Scholar] [CrossRef]
- Schulz, W.H.; McKenna, J.P.; Kibler, J.D.; Biavati, G. Relations between hydrology and velocity of a continuously moving landslide-evidence of pore-pressure feedback regulating landslide motion? Landslides 2009, 6, 181–190. [Google Scholar] [CrossRef]
- Schulz, W.H.; Jeffrey, A.C.; Pier, P.R.; Gregory, M.S.; Brett, L.S.; Joanna, P.; Eric, S.J. Data Related to a Ground-Based InSAR Survey of the Slumgullion Landslide, Hinsdale County, Colorado, 26 June 2010–1 July 2010. 2016. Available online: http://dx.doi.org/10.5066/F7TX3CFW (accessed on 12 December 2018).
- Schulz, W.; Coe, J.; Shurtleff, B.; Panosky, J.; Farina, P.; Ricci, P.; Barsacchi, G. Kinematics of the Slumgullion landslide revealed by ground-based InSAR surveys. In Proceedings of the Landslides and Engineered Slopes: Protecting Society through Improved Understanding—The 11th International and 2nd North American Symposium on Landslides and Engineered Slopes, Banff, AB, Canada, 3–8 June 2012; pp. 3–8. [Google Scholar]
- Wang, C.; Cai, J.; Li, Z.; Mao, X.; Feng, G.; Wang, Q. Kinematic Parameter Inversion of the Slumgullion Landslide Using the Time Series Offset Tracking Method with UAVSAR Data. J. Geophys. Res. Solid Earth 2018. [Google Scholar] [CrossRef]
- Corsini, A.; Bonacini, F.; Mulas, M.; Petitta, M.; Ronchetti, F.; Truffelli, G. Long-term continuous monitoring of a deep-seated compound rock slide in the Northern Apennines (Italy). In Engineering Geology for Society and Territory-Volume 2; Springer: Berlin/Heidelberg, Germany, 2015; pp. 1337–1340. [Google Scholar]
- Corsini, A.; Mulas, M. Use of ROC curves for early warning of landslide displacement rates in response to precipitation (Piagneto landslide, Northern Apennines, Italy). Landslides 2017, 14, 1241–1252. [Google Scholar] [CrossRef]
- Mulas, M.; Ciccarese, G.; Ronchetti, F.; Truffelli, G.; Corsini, A. Slope dynamics and streambed uplift during the Pergalla landslide reactivation in March 2016 and discussion of concurrent causes (Northern Apennines, Italy). Landslides 2018, 15, 1881–1887. [Google Scholar] [CrossRef]
- Viero, A.; Teza, G.; Massironi, M.; Jaboyedoff, M.; Galgaro, A. Laser scanning-based recognition of rotational movements on a deep seated gravitational instability: The Cinque Torri case (North-Eastern Italian Alps). Geomorphology 2010, 122, 191–204. [Google Scholar] [CrossRef]
- Bichler, A.; Bobrowsky, P.; Best, M.; Douma, M.; Hunter, J.; Calvert, T.; Burns, R. Three-dimensional mapping of a landslide using a multi-geophysical approach: The Quesnel Forks landslide. Landslides 2004, 1, 29–40. [Google Scholar] [CrossRef]
- Intrieri, E.; Gigli, G.; Mugnai, F.; Fanti, R.; Casagli, N. Design and implementation of a landslide early warning system. Eng. Geol. 2012, 147, 124–136. [Google Scholar] [CrossRef] [Green Version]
- Benoit, L.; Briole, P.; Martin, O.; Thom, C.; Malet, J.-P.; Ulrich, P. Monitoring landslide displacements with the Geocube wireless network of low-cost GPS. Eng. Geol. 2015, 195, 111–121. [Google Scholar] [CrossRef]
- Fielding, E.J.; Handwerger, A.L.; Burgmann, R.; Liu, Z. Slow, fast, and post-collapse displacements of the Mud Creek landslide in California from UAVSAR and satellite SAR analysis. In Proceedings of the 2017 AGU Fall Meeting, New Orleans, LA, USA, 11–15 December 2017. [Google Scholar]
- Glenn, N.F.; Streutker, D.R.; Chadwick, D.J.; Thackray, G.D.; Dorsch, S.J. Analysis of LiDAR-derived topographic information for characterizing and differentiating landslide morphology and activity. Geomorphology 2006, 73, 131–148. [Google Scholar] [CrossRef]
- Handwerger, A.L.; Rempel, A.W.; Skarbek, R.M.; Roering, J.J.; Hilley, G.E. Rate-weakening friction characterizes both slow sliding and catastrophic failure of landslides. Proc. Natl. Acad. Sci. USA 2016, 113, 10281–10286. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Jaboyedoff, M.; Oppikofer, T.; Abellán, A.; Derron, M.-H.; Loye, A.; Metzger, R.; Pedrazzini, A. Use of LIDAR in landslide investigations: A review. Nat. Hazards 2012, 61, 5–28. [Google Scholar] [CrossRef]
- Lucieer, A.; Jong, S.M.D.; Turner, D. Mapping landslide displacements using Structure from Motion (SfM) and image correlation of multi-temporal UAV photography. Prog. Phys. Geogr. 2014, 38, 97–116. [Google Scholar] [CrossRef]
- Turner, D.; Lucieer, A.; De Jong, S.M. Time series analysis of landslide dynamics using an unmanned aerial vehicle (UAV). Remote Sens. 2015, 7, 1736–1757. [Google Scholar] [CrossRef]
- Wang, G.; Bao, Y.; Cuddus, Y.; Jia, X.; Serna, J.; Jing, Q. A methodology to derive precise landslide displacement time series from continuous GPS observations in tectonically active and cold regions: A case study in Alaska. Nat. Hazards 2015, 77, 1939–1961. [Google Scholar] [CrossRef]
- Thiebes, B.; Tomelleri, E.; Mejia-Aguilar, A.; Rabanser, M.; Schlögel, R.; Mulas, M.; Corsini, A. Assessment of the 2006 to 2015 Corvara landslide evolution using a UAV-derived DSM and orthophoto. In Proceedings of the 12th International Symposium on Landslides, Napoli, Italy, 12–19 June 2016; pp. 1897–1902. [Google Scholar]
- Roering, J.J.; Mackey, B.H.; Handwerger, A.L.; Booth, A.M.; Schmidt, D.A.; Bennett, G.L.; Cerovski-Darriau, C. Beyond the angle of repose: A review and synthesis of landslide processes in response to rapid uplift, Eel River, Northern California. Geomorphology 2015, 236, 109–131. [Google Scholar] [CrossRef] [Green Version]
- Cascini, L.; Fornaro, G.; Peduto, D. Advanced low-and full-resolution DInSAR map generation for slow-moving landslide analysis at different scales. Eng. Geol. 2010, 112, 29–42. [Google Scholar] [CrossRef]
- Berardino, P.; Fornaro, G.; Lanari, R.; Sansosti, E. A new algorithm for surface deformation monitoring based on small baseline differential SAR interferograms. IEEE Trans. Geosci. Remote Sens. 2002, 40, 2375–2383. [Google Scholar] [CrossRef]
- Ferretti, A.; Prati, C.; Rocca, F. Permanent scatterers in SAR interferometry. IEEE Trans. Geosci. Remote Sens. 2001, 39, 8–20. [Google Scholar] [CrossRef] [Green Version]
- Bayer, B.; Simoni, A.; Mulas, M.; Corsini, A.; Schmidt, D. Deformation responses of slow moving landslides to seasonal rainfall in the Northern Apennines, measured by InSAR. Geomorphology 2018, 308, 293–306. [Google Scholar] [CrossRef]
- Guzzetti, F.; Manunta, M.; Ardizzone, F.; Pepe, A.; Cardinali, M.; Zeni, G.; Reichenbach, P.; Lanari, R. Analysis of ground deformation detected using the SBAS-DInSAR technique in Umbria, Central Italy. Pure Appl. Geophys. 2009, 166, 1425–1459. [Google Scholar] [CrossRef]
- Sansosti, E.; Berardino, P.; Bonano, M.; Calò, F.; Castaldo, R.; Casu, F.; Manunta, M.; Manzo, M.; Pepe, A.; Pepe, S. How second generation SAR systems are impacting the analysis of ground deformation. Int. J. Appl. Earth Obs. Geoinf. 2014, 28, 1–11. [Google Scholar] [CrossRef] [Green Version]
- Schlögel, R.; Thiebes, B.; Mulas, M.; Cuozzo, G.; Notarnicola, C.; Schneiderbauer, S.; Crespi, M.; Mazzoni, A.; Mair, V.; Corsini, A. Multi-Temporal X-Band Radar Interferometry Using Corner Reflectors: Application and Validation at the Corvara Landslide (Dolomites, Italy). Remote Sens. 2017, 9, 739. [Google Scholar] [CrossRef]
- Calabro, M.; Schmidt, D.; Roering, J. An examination of seasonal deformation at the Portuguese Bend landslide, southern California, using radar interferometry. J. Geophys. Res. Earth Surf. 2010, 115. [Google Scholar] [CrossRef] [Green Version]
- Dai, K.; Li, Z.; Tomás, R.; Liu, G.; Yu, B.; Wang, X.; Cheng, H.; Chen, J.; Stockamp, J. Monitoring activity at the Daguangbao mega-landslide (China) using Sentinel-1 TOPS time series interferometry. Remote Sens. Environ. 2016, 186, 501–513. [Google Scholar] [CrossRef] [Green Version]
- Daehne, A.; Corsini, A. Kinematics of active earthflows revealed by digital image correlation and DEM subtraction techniques applied to multi-temporal LiDAR data. Earth Surf. Process. Landf. 2013, 38, 640–654. [Google Scholar] [CrossRef]
- Le Bivic, R.; Allemand, P.; Quiquerez, A.; Delacourt, C. Potential and limitation of SPOT-5 ortho-image correlation to investigate the cinematics of landslides: The example of “Mare à Poule d’Eau”(Réunion, France). Remote Sens. 2017, 9, 106. [Google Scholar] [CrossRef]
- Raspini, F.; Ciampalini, A.; Del Conte, S.; Lombardi, L.; Nocentini, M.; Gigli, G.; Ferretti, A.; Casagli, N. Exploitation of amplitude and phase of satellite SAR images for landslide mapping: The case of Montescaglioso (South Italy). Remote Sens. 2015, 7, 14576–14596. [Google Scholar] [CrossRef]
- Stumpf, A.; Malet, J.-P.; Delacourt, C. Correlation of satellite image time-series for the detection and monitoring of slow-moving landslides. Remote Sens. Environ. 2017, 189, 40–55. [Google Scholar] [CrossRef]
- Stumpf, A.; Michéa, D.; Malet, J.-P. Improved Co-Registration of Sentinel-2 and Landsat-8 Imagery for Earth Surface Motion Measurements. Remote Sens. 2018, 10, 160. [Google Scholar] [CrossRef]
- Casu, F.; Manconi, A.; Pepe, A.; Lanari, R. Deformation Time-Series Generation in Areas Characterized by Large Displacement Dynamics: The SAR Amplitude Pixel-Offset SBAS Technique. IEEE Trans. Geosci. Remote Sens. 2011, 49, 2752–2763. [Google Scholar] [CrossRef]
- Singleton, A.; Li, Z.; Hoey, T.; Muller, J.P. Evaluating sub-pixel offset techniques as an alternative to D-InSAR for monitoring episodic landslide movements in vegetated terrain. Remote Sens. Environ. 2014, 147, 133–144. [Google Scholar] [CrossRef] [Green Version]
- Sun, L.Y.; Muller, J.P. Evaluation of the Use of Sub-Pixel Offset Tracking Techniques to Monitor Landslides in Densely Vegetated Steeply Sloped Areas. Remote Sens. 2016, 8, 659. [Google Scholar] [CrossRef]
- Aydin, A.; Eker, R.; Fuchs, H. Lidar Data Analysis With Digital Image Correlation (Dic) In Obtaining Landslide Displacement Fields: A Case Of Gschliefgraben Landslide-Austria. Online J. Sci. Technol. 2017, 7, 139–145. [Google Scholar]
- Travelletti, J.; Oppikofer, T.; Delacourt, C.; Malet, J.-P.; Jaboyedoff, M. Monitoring landslide displacements during a controlled rain experiment using a long-range terrestrial laser scanning (TLS). Int. Arch. Photogramm. Remote Sens. 2008, 37, 485–490. [Google Scholar]
- Delacourt, C.; Allemand, P.; Casson, B.; Vadon, H. Velocity field of the “La Clapière” landslide measured by the correlation of aerial and QuickBird satellite images. Geophys. Res. Lett. 2004, 31. [Google Scholar] [CrossRef] [Green Version]
- Coe, J.; Godt, J.; Ellis, W.; Savage, W.; Savage, J.; Powers, P.; Varnes, D.; Tachker, P. Seasonal Movement of the Slumgullion Landslide as Determined from GPS Observations, July 1998–July 1999; US Geological Survey: Reston, VI, USA, 2000.
- Takasu, T.; Yasuda, A. Development of the low-cost RTK-GPS receiver with an open source program package RTKLIB. In Proceedings of the International Symposium on GPS/GNSS, Jeju, Korea, 4–6 November 2009; pp. 4–6. [Google Scholar]
- Noll, C.E. The crustal dynamics data information system: A resource to support scientific analysis using space geodesy. Adv. Space Res. 2010, 45, 1421–1440. [Google Scholar] [CrossRef] [Green Version]
- Briechle, K.; Hanebeck, U.D. Template matching using fast normalized cross correlation. In Proceedings of the Optical Pattern Recognition XII; Society of Photo Optical: Bellingham, WA, USA, 2001; pp. 95–103. [Google Scholar]
- Lewis, J.P. Fast template matching. In Proceedings of the Vision Interface; Canadian Image Processing and Pattern Recognition Society, Quebec City, QC, Canada, 15–19 May 1995; pp. 120–123. [Google Scholar]
- Yoo, J.-C.; Han, T.H. Fast normalized cross-correlation. Circuits Syst. Signal Process. 2009, 28, 819. [Google Scholar] [CrossRef]
- Rosen, P.A.; Gurrola, E.; Sacco, G.F.; Zebker, H. The InSAR scientific computing environment. In Proceedings of the 9th European Conference on Synthetic Aperture Radar, Piscataway, NJ, USA, 23–26 April 2012; pp. 730–733. [Google Scholar]
- Fielding, E.J.; Lundgren, P.R.; Taymaz, T.; Yolsal-Çevikbilen, S.; Owen, S.E. Fault-slip source models for the 2011 M 7.1 Van earthquake in Turkey from SAR interferometry, pixel offset tracking, GPS, and seismic waveform analysis. Seismol. Res. Lett. 2013, 84, 579–593. [Google Scholar] [CrossRef]
- Hu, X.; Wang, T.; Liao, M. Measuring coseismic displacements with point-like targets offset tracking. IEEE Geosci. Remote Sens. Lett. 2014, 11, 283–287. [Google Scholar] [CrossRef]
- Manconi, A.; Casu, F.; Ardizzone, F.; Bonano, M.; Cardinali, M.; De Luca, C.; Gueguen, E.; Marchesini, I.; Parise, M.; Vennari, C. Brief communication: Rapid mapping of landslide events: The 3 December 2013 Montescaglioso landslide, Italy. Nat. Hazards Earth Syst. Sci. 2014, 14, 1835–1841. [Google Scholar] [CrossRef]
- Mouginot, J.; Rignot, E.; Scheuchl, B.; Millan, R. Comprehensive annual ice sheet velocity mapping using Landsat-8, Sentinel-1, and RADARSAT-2 data. Remote Sens. 2017, 9, 364. [Google Scholar] [CrossRef]
- Mouginot, J.; Scheuchl, B.; Rignot, E. Mapping of ice motion in Antarctica using synthetic-aperture radar data. Remote Sens. 2012, 4, 2753–2767. [Google Scholar] [CrossRef]
- Fialko, Y.; Simons, M.; Agnew, D. The complete (3-D) surface displacement field in the epicentral area of the 1999 Mw7. 1 Hector Mine earthquake, California, from space geodetic observations. Geophys. Res. Lett. 2001, 28, 3063–3066. [Google Scholar] [CrossRef]
- Strozzi, T.; Luckman, A.; Murray, T.; Wegmuller, U.; Werner, C.L. Glacier motion estimation using SAR offset-tracking procedures. IEEE Trans. Geosci. Remote Sens. 2002, 40, 2384–2391. [Google Scholar] [CrossRef] [Green Version]
- Breit, H.; Fritz, T.; Balss, U.; Lachaise, M.; Niedermeier, A.; Vonavka, M. TerraSAR-X SAR processing and products. IEEE Trans. Geosci. Remote Sens. 2010, 48, 727–740. [Google Scholar] [CrossRef]
- Mittermayer, J.; Wollstadt, S.; Prats-Iraola, P.; Scheiber, R. The TerraSAR-X staring spotlight mode concept. IEEE Trans. Geosci. Remote Sens. 2014, 52, 3695–3706. [Google Scholar] [CrossRef]
- Towns, J.; Cockerill, T.; Dahan, M.; Foster, I.; Gaither, K.; Grimshaw, A.; Hazlewood, V.; Lathrop, S.; Lifka, D.; Peterson, G.D. XSEDE: Accelerating scientific discovery. Comput. Sci. Eng. 2014, 16, 62–74. [Google Scholar] [CrossRef]
- Stewart, C.A.; Cockerill, T.M.; Foster, I.T.; Hancock, D.Y.; Merchant, N.; Skidmore, E.; Stanzione, D.; Taylor, J.; Tuecke, S.; Turner, G.W. Jetstream: A self-provisioned, scalable science and engineering cloud environment. In Proceedings of the XSEDE, St. Louis, MO, USA, 26–30 July 2015; pp. 29:21–29:28. [Google Scholar]
- Sansosti, E.; Berardino, P.; Manunta, M.; Serafino, F.; Fornaro, G. Geometrical SAR image registration. IEEE Trans. Geosci. Remote Sens. 2006, 44, 2861–2870. [Google Scholar] [CrossRef]
- Lee, H. Slumgullion Landslide, Colorado Airborne Lidar. National Center for Airborne Laser Mapping (NCALM), Distributed by OpenTopography. 2015. Available online: https://doi.org/10.5069/G91834KD (accessed on 10 October 2018).
- NCALM. NCALM Data Collection & Processing Summary. Available online: http://ncalm.cive.uh.edu/sites/ncalm.cive.uh.edu/files/files/data/NCALM_Data_Collection_Processing_Summary.pdf (accessed on 10 December 2018).
- Agisoft, L. Agisoft PhotoScan User Manual: Professional Edition. Available online: https://www.agisoft.com/pdf/photoscan-pro_1_4_en.pdf (accessed on 10 December 2018).
- Lowe, D.G. Object recognition from local scale-invariant features. In Proceedings of the Seventh IEEE International Conference on Computer Vision, Kerkyra, Greece, 20–27 September 1999; pp. 1150–1157. [Google Scholar]
- Ullman, S. The interpretation of structure from motion. Proc. R. Soc. Lond. B 1979, 203, 405–426. [Google Scholar] [Green Version]
- Milillo, P.; Fielding, E.J.; Shulz, W.H.; Delbridge, B.; Burgmann, R. COSMO-SkyMed Spotlight Interferometry Over Rural Areas: The Slumgullion Landslide in Colorado, USA. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2014, 7, 2919–2926. [Google Scholar] [CrossRef]
- Delbridge, B.; Burgmann, R.; Fielding, E.; Hensley, S.; IEEE. Kinematics Of The Slumgullion Landslide From Uavsar Derived Interferograms. In Proceedings of the 2015 IEEE International Geoscience and Remote Sensing Symposium, Milan, Italy, 26–31 July 2015; pp. 3842–3845. [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Ascending | Descending |
|---|---|
| 09202014 | 09012014 |
| 06302016 | 09122014 |
| 07112016 | 07032016 |
| 07222016 | 07142016 |
| 08022016 | 07252016 |
| 09152016 | 08052016 |
| 10182016 | 08162016 |
| 10292016 | 09182016 |
| n/a | 10212016 |
| n/a | 11012016 |
| GCP Name | XY RMSE | Z Error | XYZ RMSE |
|---|---|---|---|
| GCP1 | 0.142 cm | 1.205 cm | 1.213 cm |
| GCP2 | 1.374 cm | −0.570 cm | 1.488 cm |
| GCP3 | 2.256 cm | −2.926 cm | 3.695 cm |
| GCP4 | 3.233 cm | 1.169 cm | 3.438 cm |
| GCP5 | 5.925 cm | 5.398 cm | 8.016 cm |
| GCP6 | 2.061 cm | 0.348 cm | 2.091 cm |
| GCP7 | 1.663 cm | −0.288 cm | 1.688 cm |
| GCP8 | 1.916 cm | 0.254 cm | 1.933 cm |
| GCP9 | 2.527 cm | −0.005 cm | 2.527 cm |
| GCP10 | 1.280 cm | 0.059 cm | 1.282 cm |
| GCP11 | 6.024 cm | −1.375 cm | 6.179 cm |
| GCP12 | 2.785 cm | −2.736 cm | 3.904 cm |
| Total | 3.100 cm | 2.051 cm | 3.717 cm |
| 07032016–07082016 | 07032016–07142016 | 07032016–07182016 | |
|---|---|---|---|
| GCP1 | NO DATA | NO DATA | NO DATA |
| GCP2 | 1.14 cm/dy | 05.69 cm 1.82 mm | 240° | 0.67 cm/dy | 07.39 cm 0.89 mm | 259° | 0.69 cm/dy | 10.41 cm 1.30 mm | 241° |
| GCP3 | 1.49 cm/dy | 07.47 cm 0.53 mm | 237° | 1.37 cm/dy | 15.04 cm 0.99 mm | 235° | 1.44 cm/dy | 21.65 cm 1.51 mm | 235° |
| GCP4 | 1.49 cm/dy | 07.46 cm 1.23 mm | 236° | 1.13 cm/dy | 12.41 cm 1.78 mm | 240° | 1.13 cm/dy | 17.02 cm 3.19 mm | 240° |
| GCP5 | 1.70 cm/dy | 08.52 cm 0.90 mm | 222° | 1.29 cm/dy | 14.21 cm 2.25 mm | 221° | 1.37 cm/dy | 20.55 cm 0.97 mm | 224° |
| GCP6 | 1.00 cm/dy | 05.01 cm 0.50 mm | 234° | 1.22 cm/dy | 13.40 cm 0.39 mm | 233° | 1.41 cm/dy | 21.16 cm 1.97 mm | 229° |
| GCP7 | 1.33 cm/dy | 06.63 cm 3.73 mm | 217° | 1.38 cm/dy | 15.23 cm 0.99 mm | 230° | 1.53 cm/dy | 23.02 cm 0.57 mm | 232° |
| GCP8 | 1.13 cm/dy | 05.64 cm 0.79 mm | 192° | 0.63 cm/dy | 06.92 cm 0.37 mm | 221° | 0.69 cm/dy | 10.28 cm 1.85 mm | 225° |
| GCP9 | 0.75 cm/dy | 03.73 cm 1.73 mm | 249° | 0.49 cm/dy | 05.37 cm 0.43 mm | 248° | 0.50 cm/dy | 07.51 cm 0.56 mm | 240° |
| GCP11 | NO DATA | NO DATA | NO DATA |
| GCP12 | NO DATA | NO DATA | NO DATA |
| 07082016–07142016 | 07082016–07182016 | 07142016–07182016 | |
|---|---|---|---|
| GCP1 | NO DATA | 0.50 cm/dy | 05.04 cm 2.83 mm | 259° | NO DATA |
| GCP2 | 0.50 cm/dy | 03.00 cm 1.45 mm | 303° | 0.48 cm/dy | 04.76 cm 1.86 mm | 242° | 1.05 cm/dy | 04.20 cm 0.92 mm | 208° |
| GCP3 | 1.27 cm/dy | 07.64 cm 0.90 mm | 232° | 1.44 cm/dy | 14.35 cm 1.42 mm | 234° | 1.70 cm/dy | 06.80 cm 1.89 mm | 235° |
| GCP4 | 0.85 cm/dy | 05.11 cm 1.46 mm | 247° | 0.96 cm/dy | 09.60 cm 2.87 mm | 243° | 1.22 cm/dy | 04.86 cm 3.42 mm | 239° |
| GCP5 | 0.97 cm/dy | 05.82 cm 2.49 mm | 219° | 1.22 cm/dy | 12.15 cm 1.21 mm | 225° | 1.60 cm/dy | 06.41 cm 2.56 mm | 230° |
| GCP6 | 1.40 cm/dy | 08.40 cm 0.45 mm | 232° | 1.62 cm/dy | 16.18 cm 2.03 mm | 228° | 1.96 cm/dy | 07.82 cm 1.91 mm | 224° |
| GCP7 | 1.48 cm/dy | 08.89 cm 4.10 mm | 239° | 1.68 cm/dy | 16.79 cm 3.68 mm | 238° | 2.00 cm/dy | 07.98 cm 0.94 mm | 237° |
| GCP8 | 0.50 cm/dy | 02.98 cm 0.90 mm | 273° | 0.72 cm/dy | 07.24 cm 2.38 mm | 247° | 1.31 cm/dy | 05.25 cm 1.96 mm | 230° |
| GCP9 | 0.77 cm/dy | 04.59 cm 1.78 mm | 239° | 0.39 cm/dy | 03.91 cm 1.90 mm | 232° | 1.48 cm/dy | 05.92 cm 0.60 mm | 232° |
| GCP11 | NO DATA | 1.07 cm/dy | 10.71 cm 2.20 mm | 230° | NO DATA |
| GCP12 | NO DATA | 1.15 cm/dy | 11.53 cm 1.53 mm | 226° | NO DATA |
| 20140901–20160816 | 20160703–20160714 | |||||||
|---|---|---|---|---|---|---|---|---|
| Kin. Unit | Avg. Rate | St. Dev. | Avg. Angle | St. Dev. | Avg. Rate | St. Dev. | Avg. Angle | St. Dev. |
| 1 | 0.17 cm/day | 0.75 mm | 219° | 26° | 0.39 cm/day | 3.88 mm | 189° | 57° |
| 2 | 0.25 cm/day | 0.52 mm | 238° | 10° | 0.34 cm/day | 1.91 mm | 216° | 45° |
| 3 | 0.26 cm/day | 0.61 mm | 252° | 13° | 0.51 cm/day | 4.26 mm | 207° | 68° |
| 4 | 0.35 cm/day | 0.82 mm | 234° | 19° | 0.43 cm/day | 2.33 mm | 217° | 32° |
| 5 | 0.59 cm/day | 1.38 mm | 237° | 13° | 0.56 cm/day | 1.71 mm | 219° | 21° |
| 6 | 0.96 cm/day | 3.31 mm | 217° | 35° | 1.00 cm/day | 2.58 mm | 214° | 18° |
| 7 | 1.16 cm/day | 4.32 mm | 219° | 41° | 1.18 cm/day | 2.69 mm | 216° | 09° |
| 8 | 0.84 cm/day | 1.82 mm | 232° | 19° | 0.82 cm/day | 2.22 mm | 224° | 18° |
| 9 | 0.84 cm/day | 2.85 mm | 230° | 26° | 0.80 cm/day | 2.52 mm | 221° | 20° |
| 10 | 0.20 cm/day | 1.22 mm | 289° | 41° | 0.46 cm/day | 3.43 mm | 206° | 85° |
| 11 | 0.44 cm/day | 0.94 mm | 244° | 23° | 0.42 cm/day | 2.26 mm | 218° | 44° |
| 12 | 1.12 cm/day | 2.85 mm | 226° | 23° | 1.03 cm/day | 2.14 mm | 214° | 10° |
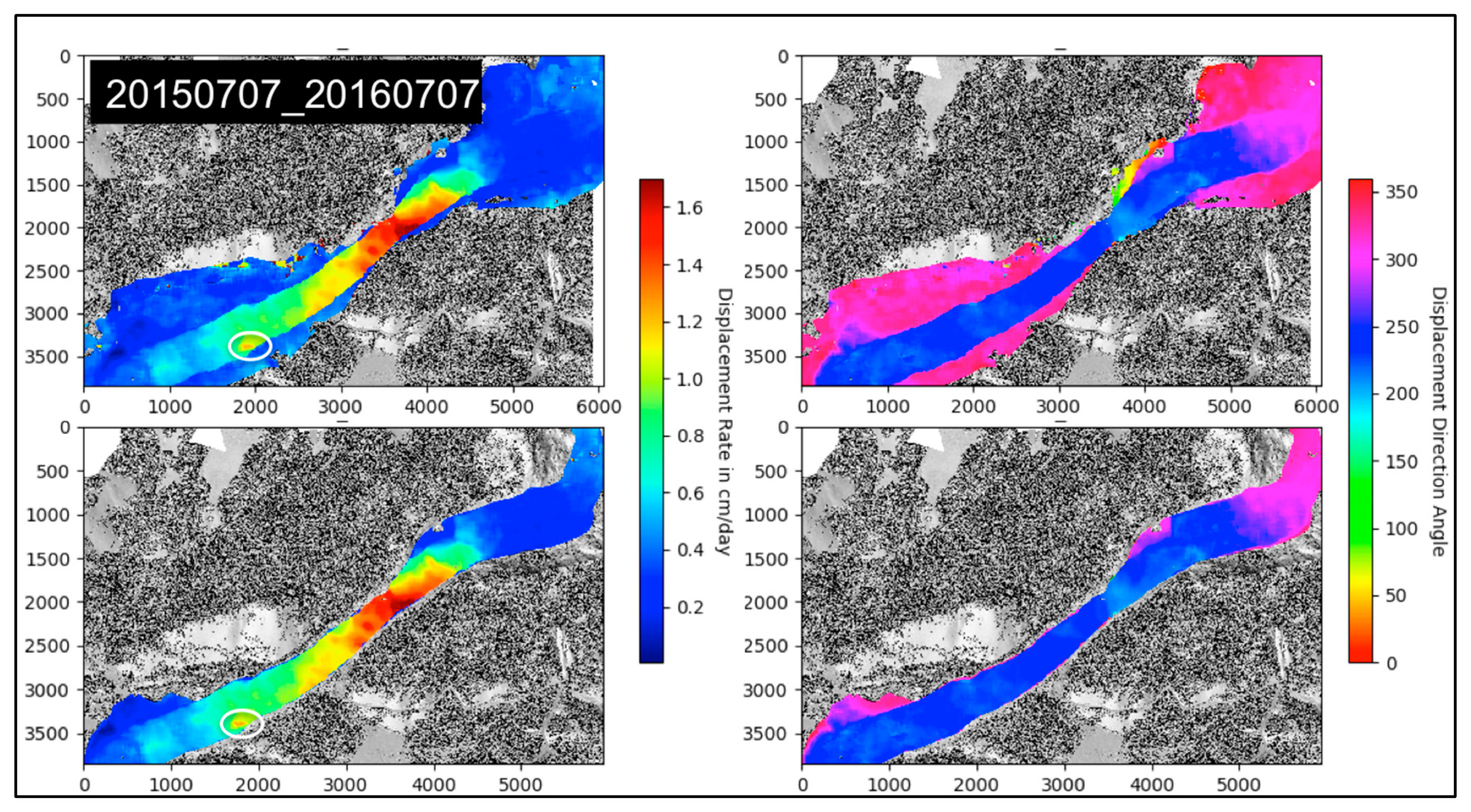
| 20150707–20160707 | ||||
|---|---|---|---|---|
| Kin. Unit | Avg. Rate | St. Dev. | Avg. Angle | St. Dev. |
| 1 | 0.37 cm/day | 2.5 mm | 305° | 13° |
| 2 | 0.26 cm/day | 0.3 mm | 277° | 14° |
| 3 | 0.23 cm/day | 0.4 mm | 253° | 18° |
| 4 | 0.37 cm/day | 1.2 mm | 245° | 23° |
| 5 | 0.71 cm/day | 1.5 mm | 224° | 10° |
| 6 | 1.11 cm/day | 2.5 mm | 226° | 18° |
| 7 | 1.33 cm/day | 4.1 mm | 229° | 22° |
| 8 | 0.84 cm/day | 1.9 mm | 236° | 21° |
| 9 | 0.86 cm/day | 2.4 mm | 233° | 12° |
| 10 | 0.23 cm/day | 0.9 mm | 283° | 35° |
| 11 | 0.47 cm/day | 0.9 mm | 229° | 11° |
| 12 | 1.03 cm/day | 1.3 mm | 238° | 5° |
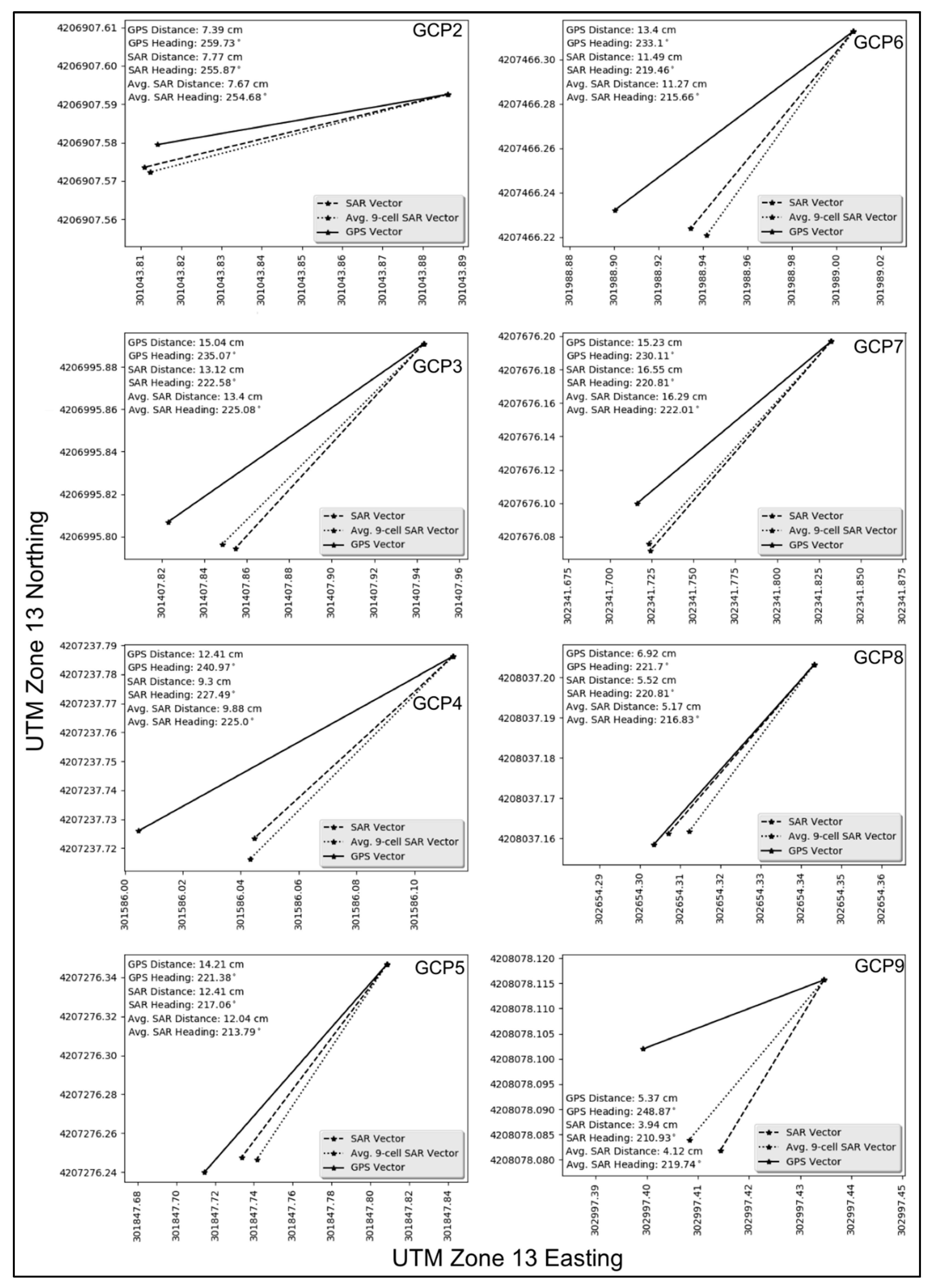
| GCP Name | SAR Magnitude | SAR 9-cell Magnitude | GNSS Magnitude | SAR Angle | SAR 9-cell Angle | GNSS Angle |
|---|---|---|---|---|---|---|
| GCP2 | 07.77 cm | 07.67 cm | 07.39 cm | 255.87° | 254.68° | 259.73° |
| GCP3 | 13.12 cm | 13.40 cm | 15.04 cm | 222.58° | 225.08° | 235.07° |
| GCP4 | 09.30 cm | 09.88 cm | 12.41 cm | 227.49° | 225.00° | 240.97° |
| GCP5 | 12.41 cm | 12.04 cm | 14.21 cm | 217.06° | 213.79° | 221.38° |
| GCP6 | 11.49 cm | 11.27 cm | 13.40 cm | 219.46° | 215.66° | 233.10° |
| GCP7 | 16.55 cm | 16.29 cm | 15.23 cm | 220.81° | 222.01° | 230.11° |
| GCP8 | 05.52 cm | 05.17 cm | 06.92 cm | 220.81° | 216.83° | 221.70° |
| GCP9 | 03.94 cm | 04.12 cm | 05.37 cm | 210.93° | 219.74° | 248.87° |
| GCP Name | HS Magnitude | HS 9-cell Magnitude | GNSS Magnitude | HS Angle | HS 9-cell Angle | GNSS Angle |
|---|---|---|---|---|---|---|
| GCP1 | 0.39 cm/day | 0.39 cm/day | 0.49 cm/day | 230° | 230° | 260° |
| GCP2 | 0.54 cm/day | 0.53 cm/day | 0.46 cm/day | 224° | 222° | 243° |
| GCP3 | 1.07 cm/day | 1.08 cm/day | 1.38 cm/day | 232° | 232° | 234° |
| GCP4 | 0.85 cm/day | 0.85 cm/day | 0.93 cm/day | 228° | 228° | 244° |
| GCP5 | 1.15 cm/day | 1.15 cm/day | 1.17 cm/day | 239° | 238° | 225° |
| GCP6 | 1.18 cm/day | 1.18 cm/day | 1.56 cm/day | 234° | 234° | 229° |
| GCP7 | 1.69 cm/day | 1.69 cm/day | 1.62 cm/day | 209° | 209° | 238° |
| GCP8 | 0.51 cm/day | 0.51 cm/day | 0.70 cm/day | 237° | 236° | 248° |
| GCP9 | 0.16 cm/day | 0.16 cm/day | 0.38 cm/day | 259° | 259° | 232° |
| GCP11 | 0.92 cm/day | 0.92 cm/day | 1.03 cm/day | 231° | 231° | 230° |
| GCP12 | 1.13 cm/day | 1.13 cm/day | 1.11 cm/day | 240° | 240° | 227° |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Madson, A.; Fielding, E.; Sheng, Y.; Cavanaugh, K. High-Resolution Spaceborne, Airborne and In Situ Landslide Kinematic Measurements of the Slumgullion Landslide in Southwest Colorado. Remote Sens. 2019, 11, 265. https://doi.org/10.3390/rs11030265
Madson A, Fielding E, Sheng Y, Cavanaugh K. High-Resolution Spaceborne, Airborne and In Situ Landslide Kinematic Measurements of the Slumgullion Landslide in Southwest Colorado. Remote Sensing. 2019; 11(3):265. https://doi.org/10.3390/rs11030265
Chicago/Turabian StyleMadson, Austin, Eric Fielding, Yongwei Sheng, and Kyle Cavanaugh. 2019. "High-Resolution Spaceborne, Airborne and In Situ Landslide Kinematic Measurements of the Slumgullion Landslide in Southwest Colorado" Remote Sensing 11, no. 3: 265. https://doi.org/10.3390/rs11030265
APA StyleMadson, A., Fielding, E., Sheng, Y., & Cavanaugh, K. (2019). High-Resolution Spaceborne, Airborne and In Situ Landslide Kinematic Measurements of the Slumgullion Landslide in Southwest Colorado. Remote Sensing, 11(3), 265. https://doi.org/10.3390/rs11030265