Estimating the Volume of Oil Tanks Based on High-Resolution Remote Sensing Images

Abstract
:1. Introduction
2. Related Work
2.1. Remote Sensing Image Shadow Detection
2.2. Shadow-Based Building Height Calculation
3. Proposed Approach
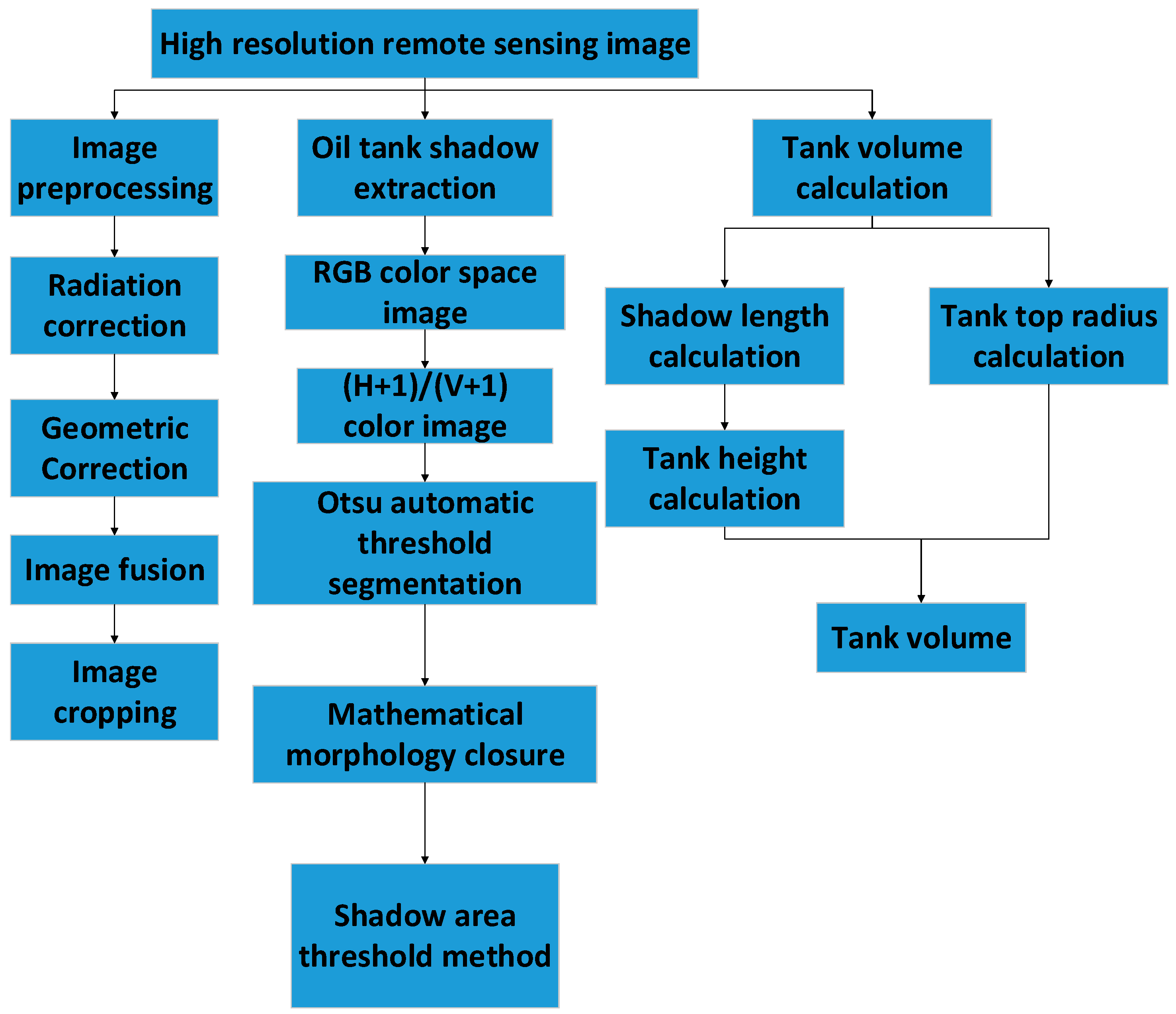
3.1. Overview of the Approach
3.2. Image Preprocessing
3.3. Oil Tank Shadow Extraction
3.4. Oil Tank Volume Calculation
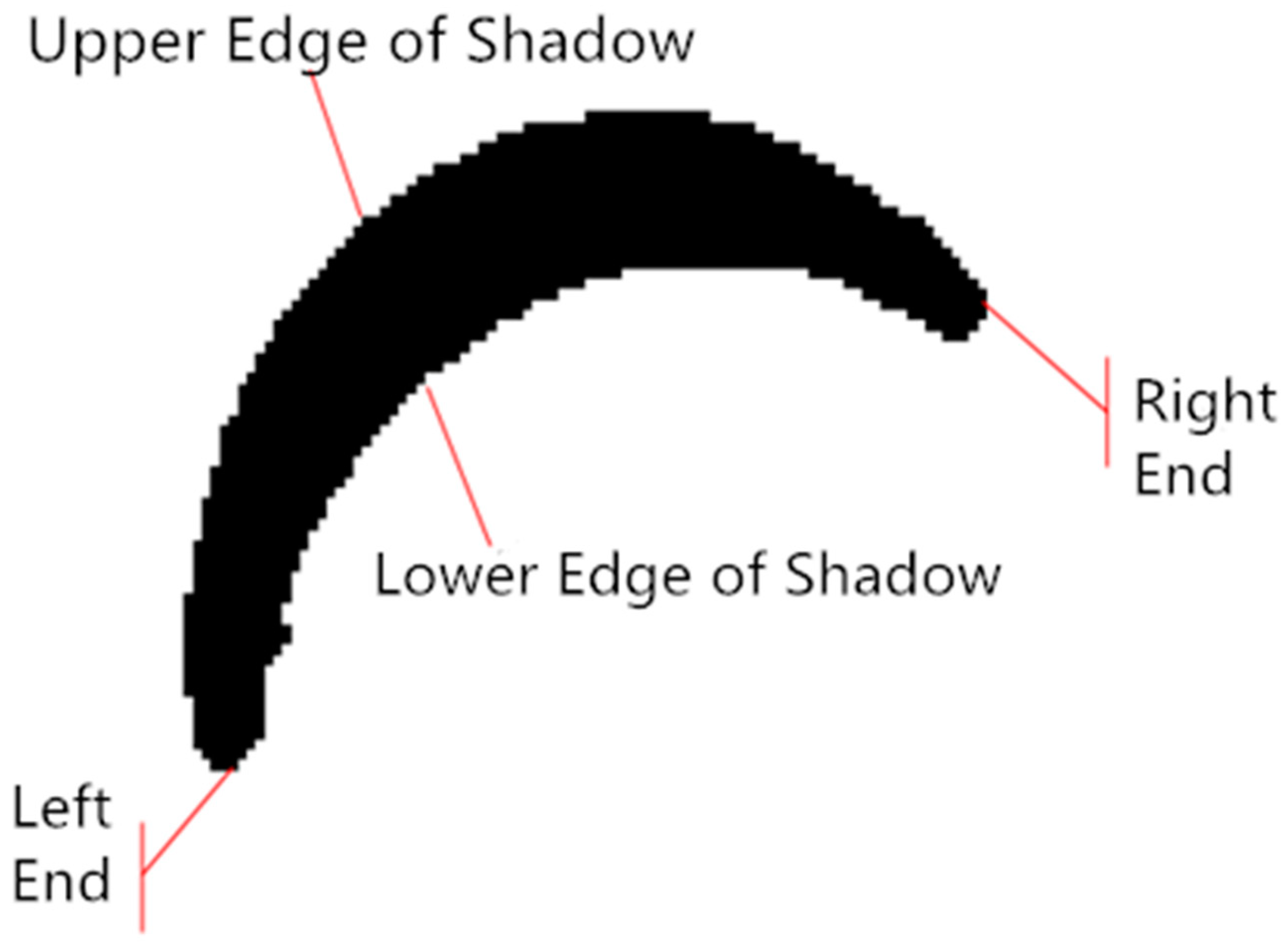
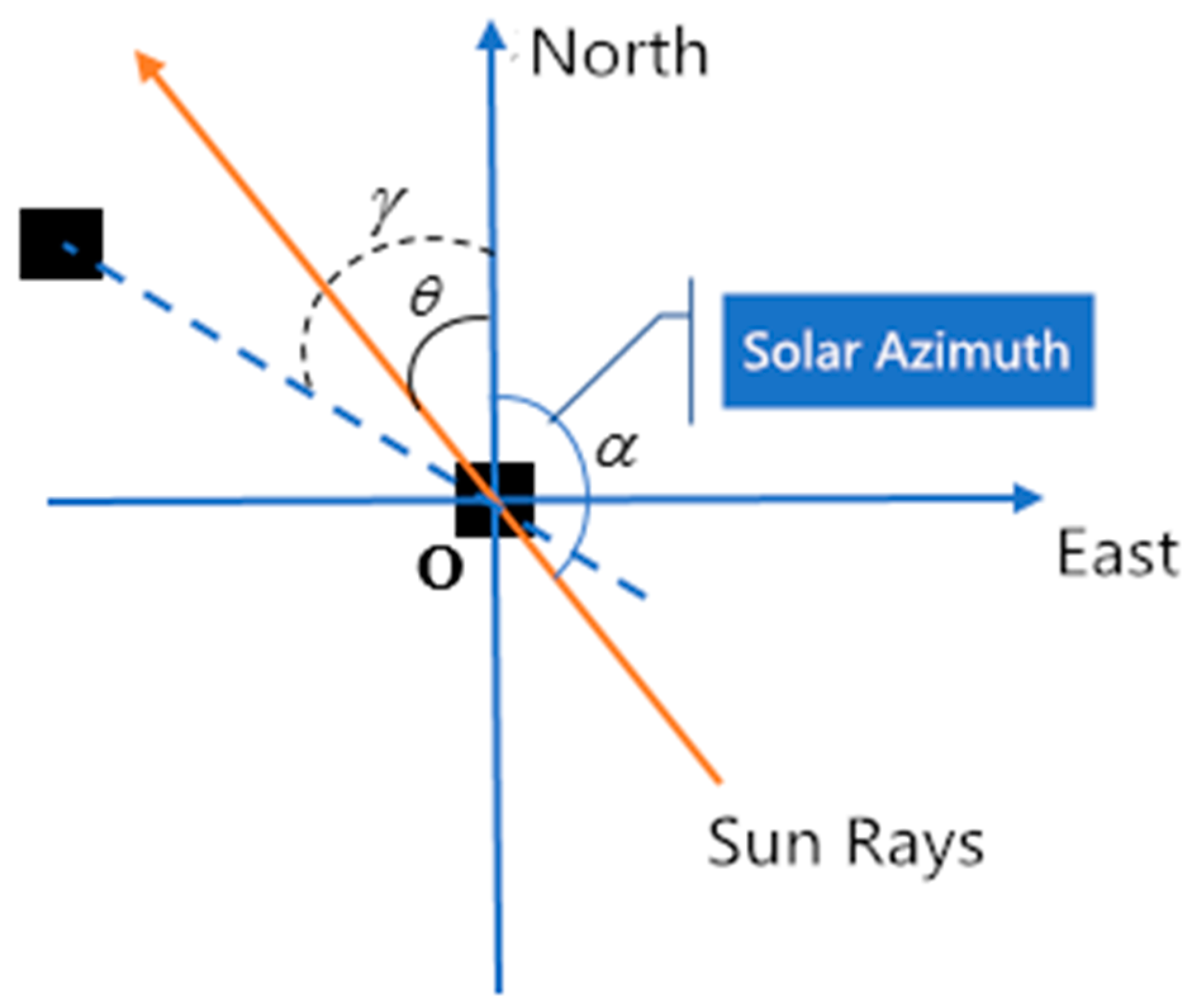
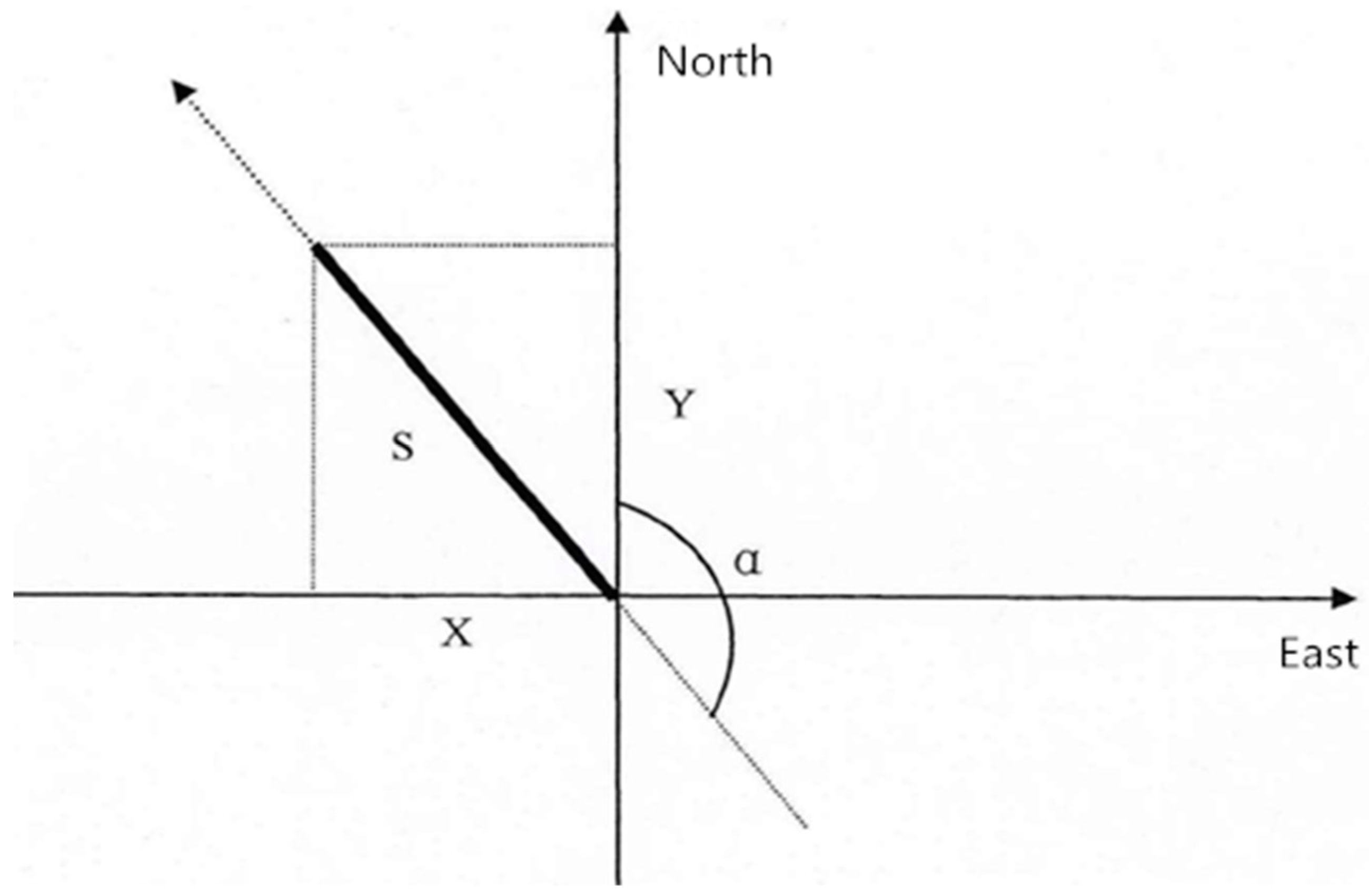
3.4.1. Shadow Length Calculation
3.4.2. Oil Tank Height Calculation
3.4.3. Oil Tank Top Radius Calculation
4. Experiment
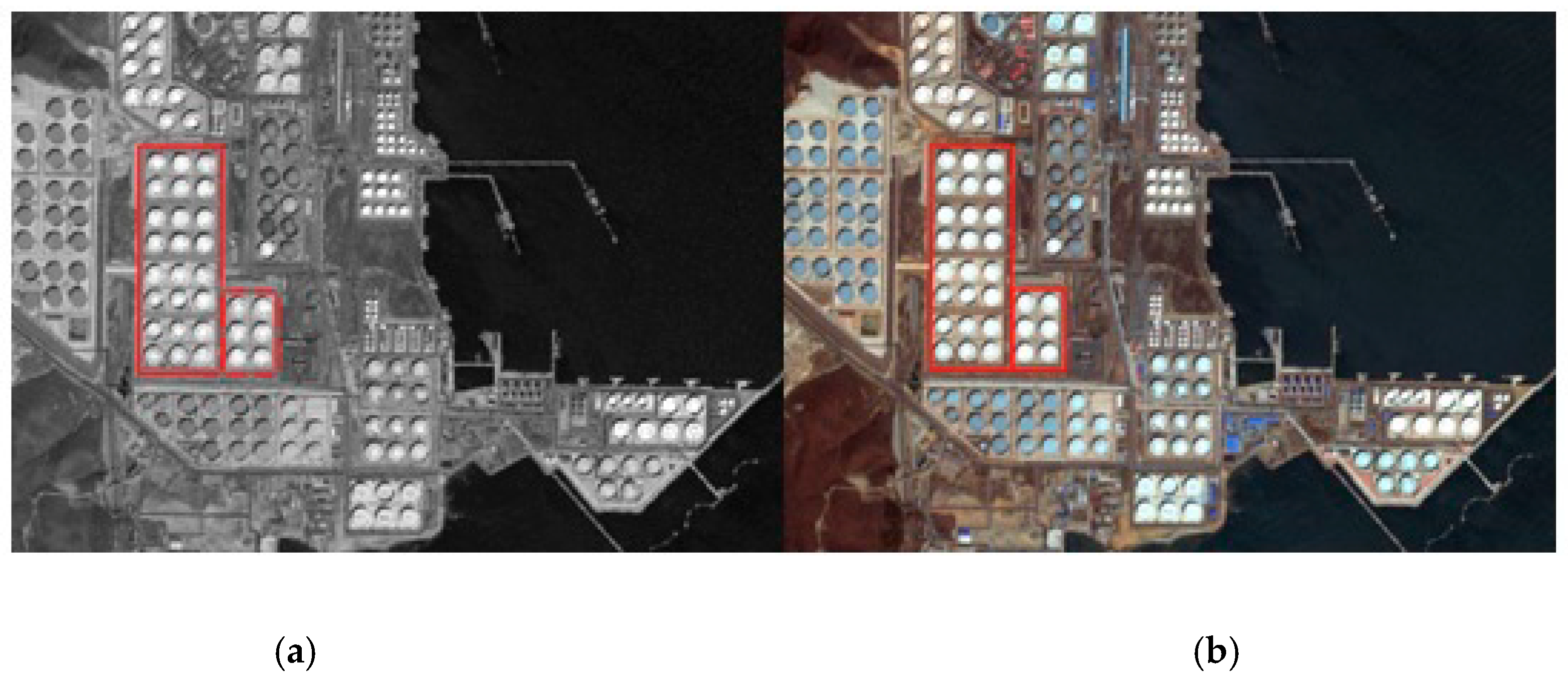
4.1. Experimental Data
4.2. Evaluation Metrics
4.2.1. Evaluation Metrics of Extracted Shadows
4.2.2. Evaluation Metrics of Oil Tank Height, Radius, and Volume
4.3. Results and Evaluation
4.3.1. Shadow Extraction
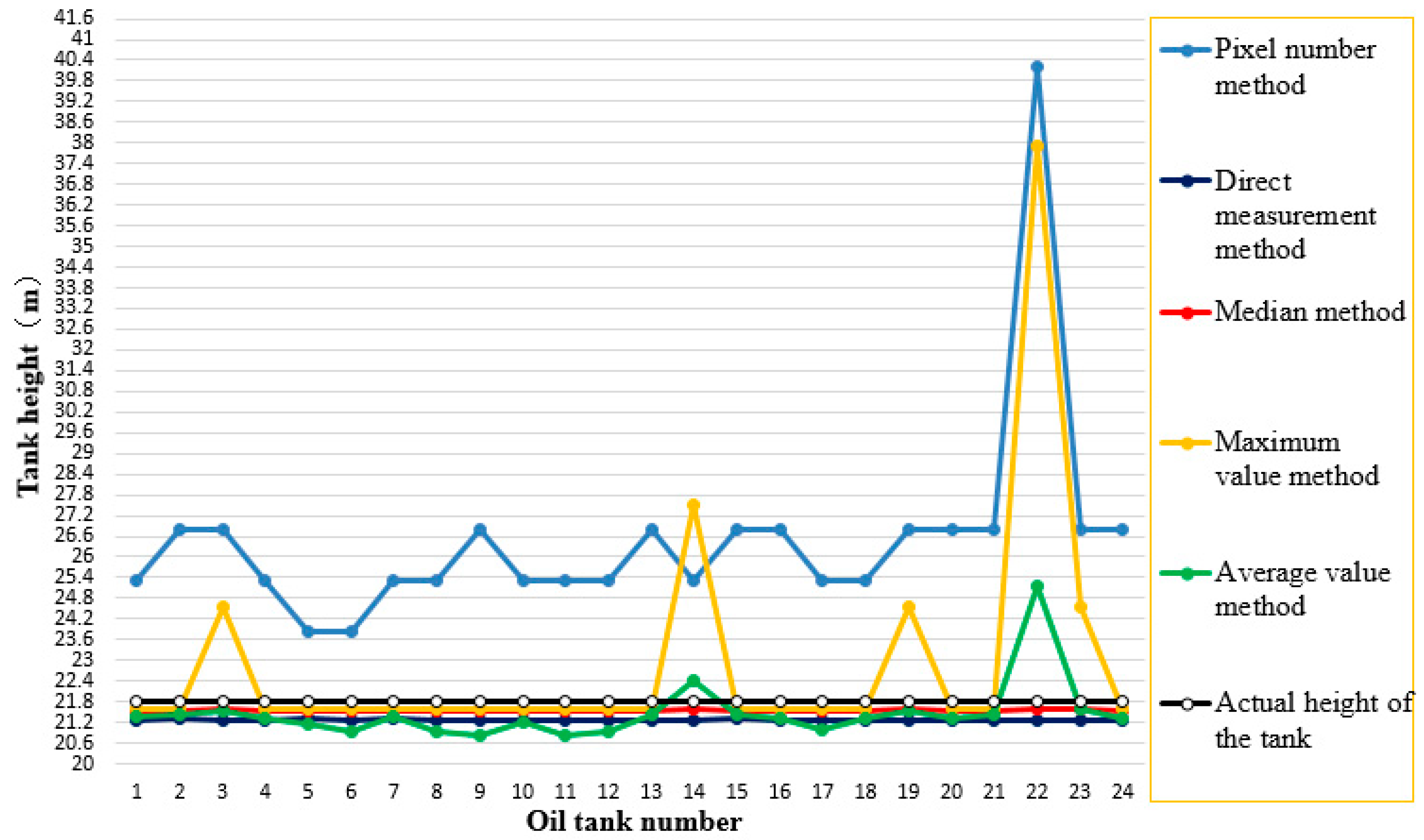
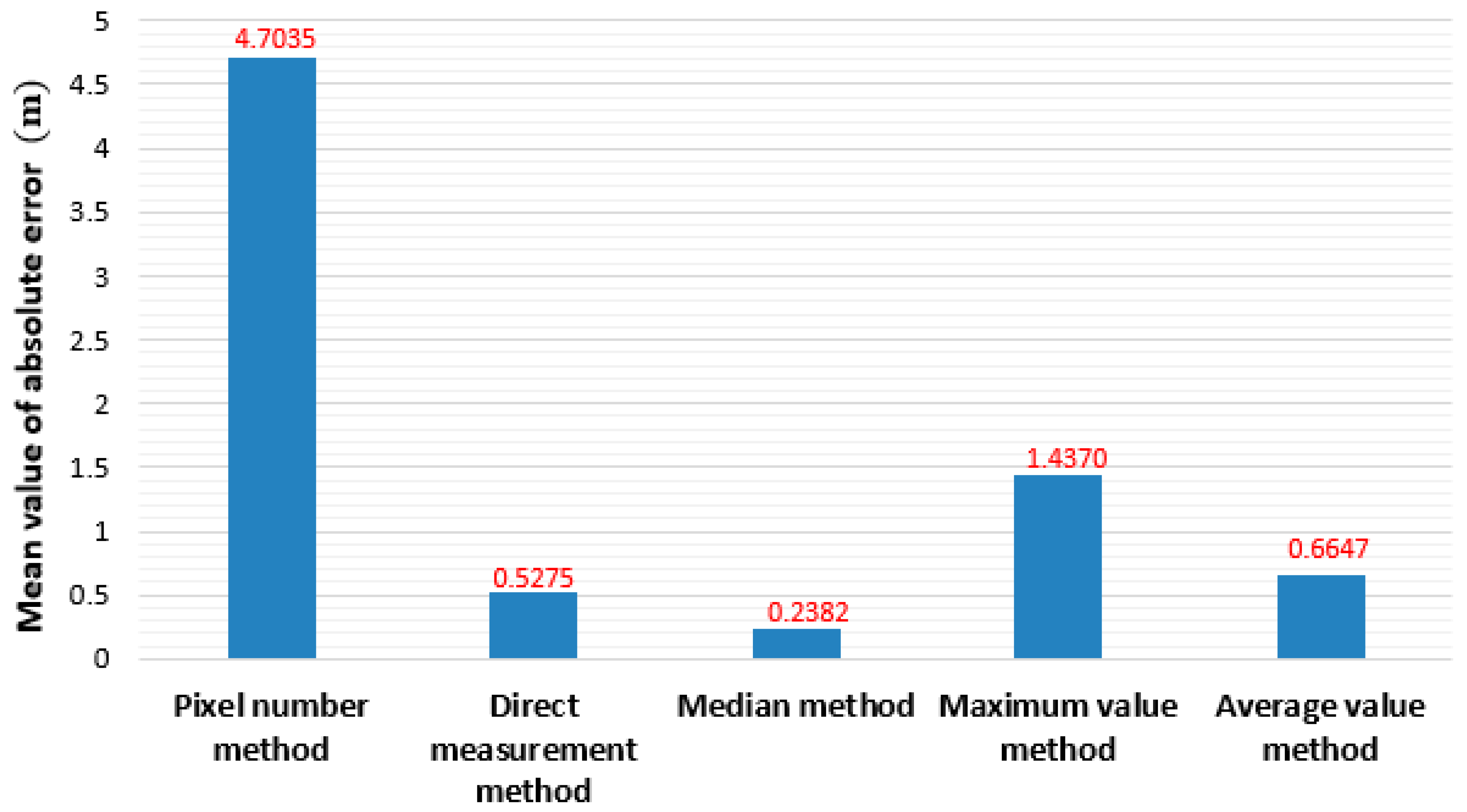
4.3.2. Oil Tank Height Calculation
4.3.3. Tank Top Radius
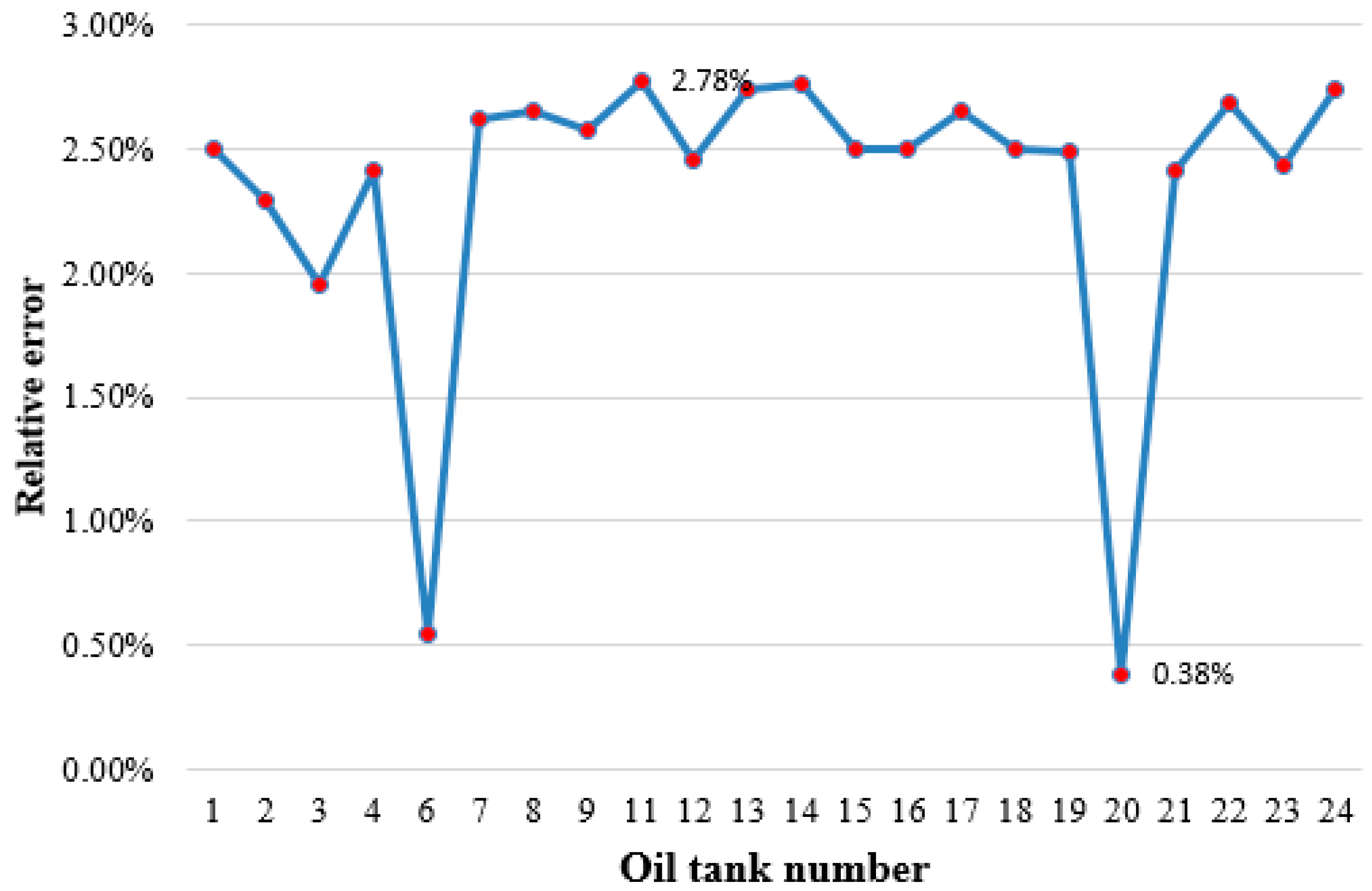
4.3.4. Tank Volume
4.4. Discussion
5. Conclusions
Author Contributions
Acknowledgments
Conflicts of Interest
Appendix A
Appendix A.1. Calculation of the Shadow Length from the Number of Pixels

Appendix A.2. Direct Measurement of Shadow Length

References
- Navulur, K.; Pacifici, F.; Baugh, B. Trends in optical commercial remote sensing industry. IEEE Geosci. Remote Sens. Mag. 2013, 1, 57–64. [Google Scholar] [CrossRef]
- Irvin, R.B.; McKeown, D.M. Methods for exploiting the relationship between buildings and their shadows in aerial imagery. IEEE Trans. Syst. Man Cybern. 1989, 19, 1564–1575. [Google Scholar] [CrossRef] [Green Version]
- Skoneczny, S. Nonlinear image sharpening in the HSV color space. Prz. Elektrotech. 2012, 88, 140–144. [Google Scholar]
- Tsai, V.J.D. A comparative study on shadow compensation of color aerial images in invariant color models. IEEE Trans. Geosci. Remote Sens. 2006, 44, 1661–1671. [Google Scholar] [CrossRef]
- Hueckel, M.F. A local visual operator which recognize edge and lines. J. ACM 1971, 18, 113–125. [Google Scholar] [CrossRef]
- Arévalo, V.; González, J.; Ambrosio, G. Shadow detection in color high resolution satellite images. Int. J. Remote Sens. 2008, 29, 1945–1963. [Google Scholar] [CrossRef]
- Yan, L.; Sasagawa, T.; Peng, G. A system of the shadow detection and shadow removal for high resolution city aerial photo. In Proceedings of the 20th ISPRS Congress, Beijing, China, 3–11 July 2008; pp. 378–382. [Google Scholar]
- Adeline, K.R.M.; Chen, M.; Briottet, X.; Pang, S.K.; Paparoditis, N. Shadow detection in very high spatial resolution aerial images: A comparative study. ISPRS J. Photogramm. Remote Sens. 2013, 80, 21–38. [Google Scholar] [CrossRef]
- Nagao, M.; Matsutyama, T.; Ikeda, Y. Region extraction and shape analysis in aerial photos. Comput. Graph. Image Process. 1979, 10, 195–223. [Google Scholar] [CrossRef]
- Dare, P.M. Shadow analysis in high-resolution satellite imagery of urban areas. Photogramm. Eng. Remote Sens. 2005, 71, 169–177. [Google Scholar] [CrossRef]
- Otsu, N. A threshold selection method from gray level histograms. IEEE Trans. Syst. Man Cybern. 1979, 9, 62–66. [Google Scholar] [CrossRef]
- Chen, Y.; Wen, D.; Jing, L.; Shi, P. Shadow information recovery in urban areas from very high resolution satellite imagery. Int. J. Remote Sens. 2007, 28, 3249–3254. [Google Scholar] [CrossRef]
- Yamazaki, F.; Liu, W.; Takasaki, M. Characteristics of shadow and removal of its effects for remote sensing imagery. In Proceedings of the International Geoscience and Remote Sensing Symposium, IGARSS, Cape Town, South Africa, 12–17 July 2009; pp. 426–429. [Google Scholar]
- Polidorio, A.M.; Flores, F.C.; Imai, N.N.; Tommaselli, A.M.G.; Franco, C. Automatic shadow segmentation in aerial color images. In Proceedings of the XVI Brazilian Symposium on Computer Graphics and Image Processing, São Carlos, Brazil, 12–15 October 2003; pp. 270–277. [Google Scholar]
- Huang, J.; Xie, W.; Tang, L. Detection of and compensation for shadows in colored urban aerial images. In Proceedings of the 5th World Congress on Intelligent Control and Automation, WCICA 2004, Hangzhou, China, 15–19 June 2004; pp. 3098–3100. [Google Scholar]
- Chung, K.L.; Lin, Y.R.; Huang, Y.H. Efficient shadow detection of color aerial images based on successive thresholding scheme. IEEE Trans. Geosci. Remote Sens. 2009, 47, 671–682. [Google Scholar] [CrossRef]
- Luo, H.; Shao, Z. A shadow detection method from urban high resolution remote sensing image based on color features of shadow. In Proceedings of the International Symposium on Information Science and Engineering, Paris, France, 28–29 October 2013; pp. 48–51. [Google Scholar]
- Cheng, F.; Thiel, K.-H. Delimiting the building height in a city from the shadow in a panchromatic SPOT image: Part 1: Test of forty-two buildings. Int. J. Remote Sens. 1995, 16, 409–415. [Google Scholar] [CrossRef]
- Hartl, P.; Cheng, F. Delimiting the building heights in a city from the shadow on a panchromatic SPOT-image: Part 2: Test of a complete city. Int. J. Remote Sens. 1995, 16, 2829–2842. [Google Scholar] [CrossRef]
- Massalabi, D.C.; Bénié, G.B.; Beaudry, E. Detecting information under and from shadow in panchromatic Ikonos images of the city of Sherbrooke. In Proceedings of the Geoscience and Remote Sensing Symposium, IEEE, Anchorage, AK, USA, 20–24 September 2004; pp. 2000–2003. [Google Scholar]
- Izadi, M.; Saeedi, P. Three-dimensional polygonal building model estimation from single satellite images. IEEE Trans. Geosci. Remote Sens. 2012, 50, 2254–2272. [Google Scholar] [CrossRef]
- Wang, J.L.; Wang, X.H. Information extraction of building height and density based on quick bird image in Kunming, China. In Proceedings of the 2009 Joint Urban Remote Sensing Event, Shanghai, China, 20–22 May 2009; pp. 1–8. [Google Scholar]
- Qi, F.; Wang, Y.X. A new calculation method for shape coefficient of residential building using Google Earth. Energy Build. 2014, 76, 72–80. [Google Scholar] [CrossRef]
- Turker, M.; Sumer, E. Building-based damage detection due to earthquake using the watershed segmentation of the post-event aerial images. Int. J. Rem. Sens. 2008, 29, 3073–3089. [Google Scholar] [CrossRef]
- Qi, F.; Zhai, J.Z.; Dang, G. Building height estimation using Google Earth. Energy Build. 2016, 118, 123–132. [Google Scholar] [CrossRef]
- Liasis, G.; Stavrou, S. Satellite images analysis for shadow detection and building height estimation. ISPRS J. Photogram. Remote Sens. 2016, 119, 437–450. [Google Scholar] [CrossRef]
- Liu, X.; Su, Y. The QuickBird RemoteSensing image extracting building shadow Information method improvement. J. Hebei United Univ. 2013, 35, 64–67. [Google Scholar]
- Zhang, H. Research on Buildings Shadow Detection Method and Height Inversion with Hight Resolution Sensed Image. Master’s Thesis, Southwest Jiaotong University, Chengdu, China, May 2017. [Google Scholar]
- Chander, G.; Hewison, T.J.; Fox, N.; Wu, X.; Xiong, X.; Blackwell, W.J. Overview of intercalibration of satellite instruments. IEEE Trans. Geosci. Remote Sens. 2013, 51, 1056–1080. [Google Scholar] [CrossRef]
- Markham, B.L.; Helder, D.L. Forty-year calibrated record of earth-reflected radiance from Landsat: A review. Remote Sens. Environ. 2012, 122, 30–40. [Google Scholar] [CrossRef] [Green Version]
- Mishra, N.; Helder, D.; Angal, A.; Choi, J.; Xiong, X. Absolute calibration of optical satellite sensors using Libya 4 pseudo invariant calibration site. Remote Sens. 2014, 6, 1327–1346. [Google Scholar] [CrossRef]
- Karlsson, K.G.; Johansson, E. Multi-sensor calibration studies of AVHRR-heritage channel radiances using the simultaneous nadir observation approach. Remote Sens. 2014, 6, 1845–1862. [Google Scholar] [CrossRef]
- Xu, G.-S. Sub-pixel edge detection based on curve fitting. In Proceedings of the 2009 Second International Conference on Information and Computing Science, IEEE, Manchester, UK, 21–22 May 2009; pp. 373–375. [Google Scholar]
- Lin, Q. Oil Reservoir Safety Evaluation and Risk Control Research of Port of Dalian. Master’s Thesis, Dalian Maritime University, Dalian, China, March 2013. [Google Scholar]
- Shufelt, J.A. Performance Evaluation and Analysis of Monocular Building Extraction from Aerial Imagery. IEEE Trans. Pattern Anal. Mach. Intell. 1999, 21, 311–326. [Google Scholar] [CrossRef]
- Kadhim, N.; Mourshed, M. A shadow-overlapping algorithm for estimating building heights from VHR satellite images. IEEE Geosci. Remote Sens. Lett. 2018, 15, 8–12. [Google Scholar] [CrossRef]
- Kim, T.; Javzandulam, T.; Lee, T.-Y. Semiautomatic reconstruction of building height and footprints from single satellite images. In Proceedings of the 2007 IEEE International Geoscience and Remote Sensing Symposium, Barcelona, Spain, 23–28 July 2007; pp. 4737–4740. [Google Scholar]
- Shao, Y.; Taff, G.N.; Walsh, S.J. Shadow detection and buildingheight estimation using IKONOS data. Int. J. Remote Sens. 2011, 32, 6929–6944. [Google Scholar] [CrossRef]
- Lee, T.; Kim, T. Automatic building height extraction by volumetric shadow analysis of monoscopic imagery. Int. J. Remote Sens. 2013, 34, 5834–5850. [Google Scholar] [CrossRef]
- Wang, F.; Lin, Q. The study of the extraction of buildings’ height on a large scale with shadows. In Proceedings of the International Conference on Remote Sensing (ICRS), Nanchang, China, 2010. [Google Scholar]






















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Camera | Value |
|---|---|---|
| Spectral range | Panchromatic | 0.450.90 μm |
| Multispectral | 0.45–0.52 μm 0.52–0.59 μm 0.63–0.69 μm 0.77–0.89 μm | |
| Spatial resolution | Panchromatic | 0.81 m |
| Multispectral | 3.20 m | |
| Amplitude | 45 km (two camera combinations) | |
| Revisit cycle (side swing) | 5 days | |
| Coverage period (not side) | 69 days | |
| Detection Method | Recall (%) | Precision (%) |
|---|---|---|
| Histogram threshold method | 95.73 | 60.07 |
| Morphological method | 96.20 | 54.02 |
| Proposed method | 96.95 | 96.05 |
| Shadow Number | Pixel Number Method (m) | Direct Measurement Method (m) | Median Method (m) | Maximum Method (m) | Mean Method (m) |
|---|---|---|---|---|---|
| 1 | 15.8276 | 13.2891 | 13.4757 | 13.4797 | 13.3476 |
| 2 | 15.8276 | 13.2891 | 13.4757 | 13.4797 | 13.3819 |
| 3 | 15.8276 | 13.2891 | 13.4777 | 15.3389 | 13.4697 |
| 4 | 15.8276 | 13.2891 | 13.4757 | 13.4797 | 13.3383 |
| 5 | 15.8276 | 13.2891 | 13.4757 | 13.4797 | 13.2034 |
| 6 | 15.8276 | 13.2891 | 13.4757 | 13.4797 | 13.0895 |
| 7 | 15.8276 | 13.2891 | 13.4757 | 13.4797 | 13.3634 |
| 8 | 15.8276 | 13.2891 | 13.4757 | 13.4797 | 13.0940 |
| 9 | 16.7586 | 13.2779 | 13.4757 | 13.4797 | 13.0120 |
| 10 | 16.7586 | 13.2779 | 13.4757 | 13.4797 | 13.2622 |
| 11 | 16.7586 | 13.2779 | 13.4757 | 13.4797 | 13.0253 |
| 12 | 16.7586 | 13.2779 | 13.4757 | 13.4797 | 13.0914 |
| 13 | 16.7586 | 13.2779 | 13.4757 | 13.4797 | 13.4041 |
| 14 | 16.7586 | 13.2779 | 13.4777 | 17.1981 | 14.0023 |
| 15 | 16.7586 | 13.2779 | 13.4757 | 13.4797 | 13.4074 |
| 16 | 16.7586 | 13.2779 | 13.4757 | 13.4797 | 13.3108 |
| 17 | 15.8276 | 13.2736 | 13.4757 | 13.4797 | 13.1256 |
| 18 | 15.8276 | 13.2736 | 13.4757 | 13.4797 | 13.3260 |
| 19 | 15.8276 | 13.2736 | 13.4777 | 15.3389 | 13.4682 |
| 20 | 15.8276 | 13.2736 | 13.4757 | 13.4797 | 13.3260 |
| 21 | 15.8276 | 13.2736 | 13.4757 | 13.4797 | 13.3890 |
| 22 | 15.8276 | 13.2736 | 13.4777 | 23.7044 | 15.7199 |
| 23 | 15.8276 | 13.2736 | 13.4777 | 15.3389 | 13.4979 |
| 24 | 15.8276 | 13.2736 | 13.4757 | 13.4797 | 13.3180 |
| Shadow Number | Pixel Number Method (m) | Direct Measurement Method (m) | Median Method (m) | Maximum Method (m) | Mean Method (m) |
|---|---|---|---|---|---|
| 1 | 25.3242 | 21.2626 | 21.5611 | 21.5675 | 21.3562 |
| 2 | 26.8138 | 21.2947 | 21.5611 | 21.5675 | 21.4110 |
| 3 | 26.8138 | 21.2469 | 21.5643 | 24.5422 | 21.5515 |
| 4 | 25.3242 | 21.2819 | 21.5611 | 21.5675 | 21.3413 |
| 5 | 23.8346 | 21.3010 | 21.5611 | 21.5675 | 21.1254 |
| 6 | 23.8346 | 21.2653 | 21.5611 | 21.5675 | 20.9432 |
| 7 | 25.3242 | 21.2962 | 21.5611 | 21.5675 | 21.3814 |
| 8 | 25.3242 | 21.2547 | 21.5611 | 21.5675 | 20.9504 |
| 9 | 26.8138 | 21.2446 | 21.5611 | 21.5675 | 20.8192 |
| 10 | 25.3242 | 21.2710 | 21.5611 | 21.5675 | 21.2195 |
| 11 | 25.3242 | 21.2570 | 21.5611 | 21.5675 | 20.8405 |
| 12 | 25.3242 | 21.2674 | 21.5611 | 21.5675 | 20.9462 |
| 13 | 26.8138 | 21.2818 | 21.5611 | 21.5675 | 21.4466 |
| 14 | 25.3242 | 21.2667 | 21.5643 | 27.5170 | 22.4037 |
| 15 | 26.8138 | 21.2963 | 21.5611 | 21.5675 | 21.4518 |
| 16 | 26.8138 | 21.2870 | 21.5611 | 21.5675 | 21.2973 |
| 17 | 25.3242 | 21.2378 | 21.5611 | 21.5675 | 21.0010 |
| 18 | 25.3242 | 21.2725 | 21.5611 | 21.5675 | 21.3216 |
| 19 | 26.8138 | 21.2838 | 21.5643 | 24.5422 | 21.5491 |
| 20 | 26.8138 | 21.2878 | 21.5611 | 21.5675 | 21.3216 |
| 21 | 26.8138 | 21.2722 | 21.5611 | 21.5675 | 21.4224 |
| 22 | 40.2206 | 21.2539 | 21.5643 | 37.9270 | 25.1518 |
| 23 | 26.8138 | 21.2702 | 21.5643 | 24.5422 | 21.5966 |
| 24 | 26.8138 | 21.2875 | 21.5611 | 21.5675 | 21.3088 |
| Shadow Number | Calculated Radius Length (m) | Actual Radius Length (m) | Absolute Error (m) | Relative Error (%) |
|---|---|---|---|---|
| 1 | 39.7177 | 40.0000 | 0.2823 | 0.71 |
| 2 | 39.7584 | 40.0000 | 0.2416 | 0.60 |
| 3 | 39.8245 | 40.0000 | 0.1755 | 0.44 |
| 4 | 39.7335 | 40.0000 | 0.2665 | 0.67 |
| 6 | 40.1134 | 40.0000 | 0.1134 | 0.28 |
| 7 | 39.6921 | 40.0000 | 0.3079 | 0.77 |
| 8 | 39.6844 | 40.0000 | 0.3156 | 0.79 |
| 9 | 39.7004 | 40.0000 | 0.2996 | 0.75 |
| 11 | 39.6587 | 40.0000 | 0.3413 | 0.85 |
| 12 | 39.7253 | 40.0000 | 0.2747 | 0.69 |
| 13 | 39.6668 | 40.0000 | 0.3332 | 0.83 |
| 14 | 39.6587 | 40.0000 | 0.3413 | 0.85 |
| 15 | 39.7168 | 40.0000 | 0.2832 | 0.71 |
| 16 | 39.7166 | 40.0000 | 0.2834 | 0.71 |
| 17 | 39.6834 | 40.0000 | 0.3166 | 0.79 |
| 18 | 39.7171 | 40.0000 | 0.2829 | 0.71 |
| 19 | 39.7168 | 40.0000 | 0.2832 | 0.71 |
| 20 | 40.1461 | 40.0000 | 0.1461 | 0.37 |
| 21 | 39.7335 | 40.0000 | 0.2665 | 0.67 |
| 22 | 39.6752 | 40.0000 | 0.3248 | 0.81 |
| 23 | 39.7255 | 40.0000 | 0.2745 | 0.69 |
| 24 | 39.6668 | 40.0000 | 0.3332 | 0.83 |
| Mean | 39.7469 | 0.2767 | 0.69 |
| Shadow Number | Calculated Tank Volume (104 m3) | Actual Tank Volume (104 m3) | Absolute Error (m3) | Relative Error (%) |
|---|---|---|---|---|
| 1 | 10.6799 | 10.9532 | 0.2733 | 2.50 |
| 2 | 10.7018 | 10.9532 | 0.2514 | 2.30 |
| 3 | 10.7390 | 10.9532 | 0.2142 | 1.96 |
| 4 | 10.6884 | 10.9532 | 0.2648 | 2.42 |
| 6 | 10.8938 | 10.9532 | 0.0594 | 0.54 |
| 7 | 10.6662 | 10.9532 | 0.2870 | 2.62 |
| 8 | 10.6620 | 10.9532 | 0.2912 | 2.66 |
| 9 | 10.6706 | 10.9532 | 0.2826 | 2.58 |
| 11 | 10.6482 | 10.9532 | 0.3050 | 2.78 |
| 12 | 10.6840 | 10.9532 | 0.2692 | 2.46 |
| 13 | 10.6526 | 10.9532 | 0.3006 | 2.74 |
| 14 | 10.6498 | 10.9532 | 0.3034 | 2.77 |
| 15 | 10.6795 | 10.9532 | 0.2737 | 2.50 |
| 16 | 10.6793 | 10.9532 | 0.2739 | 2.50 |
| 17 | 10.6615 | 10.9532 | 0.2917 | 2.66 |
| 18 | 10.6796 | 10.9532 | 0.2736 | 2.50 |
| 19 | 10.6810 | 10.9532 | 0.2722 | 2.49 |
| 20 | 10.9116 | 10.9532 | 0.0416 | 0.38 |
| 21 | 10.6884 | 10.9532 | 0.2648 | 2.42 |
| 22 | 10.6587 | 10.9532 | 0.2945 | 2.69 |
| 23 | 10.6857 | 10.9532 | 0.2675 | 2.44 |
| 24 | 10.6526 | 10.9532 | 0.3006 | 2.74 |
| Mean | 10.6961 | 0.2571 | 2.35 |
| Ref | Year | VHR Satellite Imagery Source | RMSE | Mean Error (m) |
|---|---|---|---|---|
| [37] | 2007 | Panchromatic IKONOS | 1.86 | 1.34 |
| [38] | 2011 | Panchromatic IKONOS | 12.99 | — |
| [21] | 2012 | QuickBird | 1.38 | 1.14 |
| [39] | 2013 | Panchromatic IKONOS | 1.34 | — |
| QuickBird | 1.71 | — | ||
| KOMPSAT2 | 1.67 | — | ||
| WorldView1(WV1) | 1.88 | — | ||
| [25] | 2016 | Google Earth | 0.98 | 0.82 |
| [26] | 2016 | Google Earth | 22.66 | — |
| [35] | 2018 | WorldView3(WV3) | 1.22 | 0.65 |
| This paper | — | Gaofen-2 | 0.23 | 0.24 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, T.; Li, Y.; Yu, S.; Liu, Y. Estimating the Volume of Oil Tanks Based on High-Resolution Remote Sensing Images. Remote Sens. 2019, 11, 793. https://doi.org/10.3390/rs11070793
Wang T, Li Y, Yu S, Liu Y. Estimating the Volume of Oil Tanks Based on High-Resolution Remote Sensing Images. Remote Sensing. 2019; 11(7):793. https://doi.org/10.3390/rs11070793
Chicago/Turabian StyleWang, Tong, Ying Li, Shengtao Yu, and Yu Liu. 2019. "Estimating the Volume of Oil Tanks Based on High-Resolution Remote Sensing Images" Remote Sensing 11, no. 7: 793. https://doi.org/10.3390/rs11070793
APA StyleWang, T., Li, Y., Yu, S., & Liu, Y. (2019). Estimating the Volume of Oil Tanks Based on High-Resolution Remote Sensing Images. Remote Sensing, 11(7), 793. https://doi.org/10.3390/rs11070793