1. Introduction
The synthetic aperture radar (SAR) is one of the important remote sensors for detection and monitoring of crude oil spills on the ocean surface because it can function well in almost all-weather conditions, day or night, with high resolution and provides synoptic observational data. Our focus is the application of polarimetric imagery from RADARSAT satellites. There has been a progression of SAR instrumentation from single-polarization imagery, used previously by RADARSAT-1, available until 2012, to present-day quad-polarimetric (QP or fully-polarimetric) SAR data from RADARSAT-2 (RS-2) satellite, which was launched in 2007. Compact polarimetry (CP) will become available later in 2019 with the launch of three new satellites in the RADARSAT Constellation Mission, RCM.
QP SAR systems have dual-polarization (DP) linear transmission and receive capability for both orthogonal linear polarizations. Thus, QP SAR systems provide optimal observations and the complete polarization scattering properties of the ocean surface scatterers and targets. QP SAR data have been applied in many studies related to oil spill detection and monitoring in the marine environment [
1,
2,
3,
4,
5,
6,
7,
8]. For a clean ocean surface with medium incidence angle (20°–60°) and wind speed 3–14 m/s (which is necessary for slick detection by SAR), the main scattering mechanism is Bragg scattering. In contrast, scattering is usually non-Bragg for an oil-covered ocean surface [
1,
3,
6,
9]; although Bragg scattering has also been observed for C-band and L-band radars, presumably reflecting different weathering and aging stages of the oil [
10,
11,
12]. Ivonin et al. [
13] proposed the study of normalized resonant and nonresonant signals within the slick in order to classify the nature of oil spills. Theoretical studies can also open new methodologies for application of polarization contrasts for slick type classification [
14]. However, limitations for quad-pol SAR are notable: small spatial coverage and long revisit time, for example about 50 km swath width for QP RS-2 observations, compared to relatively short revisit time and swath widths of about 500 km for DP SAR (
https://mdacorporation.com/docs/default-source/technical-documents/geospatial-services/52-1238_rs2_product_description.pdf?sfvrsn=10).
Therefore, CP SAR has been proposed in an attempt to overcome certain limitations related to QP SAR [
15,
16]. CP is a newly developed SAR architecture, specifically a coherent dual polarized SAR, where one polarization is transmitted and two orthogonal polarizations are received, with each having relative phase with respect to the other [
15,
16]. The transmitted wave has circular polarization and the received radar signal has orthogonal linear polarizations. This is called hybrid polarimetry (HP) CP [
16] and it builds on the π/4 CP mode SAR proposed by Souyris et al. [
15]. This methodology combines enhanced integrated polarization modes and the wide coverage of ScanSAR modes, notably increasing the SAR data acquisition compared to what is available from RS-2 QP SAR observations. HP CP SAR has been successfully used by India’s RISAT-1 satellite; however, the latter is a commercial satellite. RCM is to be launched later in 2019 and is supposed to provide HP CP SAR imagery from 3 identical satellites with 350 km swath width and resolution of 50 m (
http://www.asc-csa.gc.ca/eng/satellites/radarsat/default.asp). This capability compares well to the relatively long revisit times and narrow swath widths for RS-2 QP observations. The potential of CP SAR applications for marine monitoring provides the motivation to study the characteristics of oil spills with respect to this new SAR mode.
There have been some efforts to monitor oil spills with actual HP observations. For example, RISAT-1 HP measurements collected during the NOrwegian Radar oil Spill Experiment in 2015 (NORSE2015) jointly operated by UiT, The Arctic University of Norway, Jet Propulsion Laboratory (JPL)/National Aeronautics and Space Administration (NASA) are good cases. NORSE2015 was designed for systematic collection of X-, C-, and L-band SAR data over oil emulsions with known oil fraction and quantity [
17,
18,
19,
20,
21]. The cross-correlation between RH and RV [
17], the dispersion and the evolution of the oil spill [
18,
19] have been studied with actual HP observations. The Stokes parameters and polarimetric characteristics used to detect oil spills were proposed based on RISAT-1 HP observations [
20,
21].
Recent studies suggest applications of
simulated HP data, based on QP imagery, for oil spill detection and monitoring, because currently available actual CP SAR data are somewhat limited. This approach uses the Stokes vector, or the ‘child’ Stokes parameters and eigenvalue analysis, from CP data [
11,
19,
22,
23,
24,
25,
26]. Shirvany et al. [
22] employed the degree of polarization, which is one of the ‘child’ Stokes parameters calculated from Stokes parameters to detect oil spills, ships and buoys. The results are encouraging for oil spill structures and properties, but purely qualitative. Nunziata et al. [
24] also proposed to use the degree of polarization from HP CP SAR for oil spill detection. Salberg et al. [
23] made an attempt to use parameters from CP SAR to discriminate oil spills from the low-wind lookalike phenomena, by combining the coherence, degree of polarization, and conformity index from CP SAR into a vector, which performs better than any individual parameter. Li et al. [
11] demonstrated the diversity of the scattering mechanisms of oil spills with the ‘child’ Stokes parameters; later they proposed to use the second Stokes parameter for oil spill detection [
25]. Efforts have been made to understand the physical link between QP and CP SAR observations [
26,
27]. These studies have also pointed out that the π/4 mode performs best, i.e., closer to the QP mode, for sea oil slick observation purposes. Espeseth et al. [
19] compared an analysis of evolving oil spills in QP SAR and HP SAR data. Salberg and Larsen [
28] used a machine-learning trained system to classify new oil spill images in new areas from HP observations and thus, to classify different kinds of oil spills. Some studies have shown that the HP mode CP is comparable to the QP mode in regard to its ability to distinguish the various oil slicks from open water for wind speeds as high as 9–12 m/s [
19,
26,
27,
28,
29].
All the above efforts have been made in oil spill detection and classification. There are still many challenges in oil slick quantitative estimation, such as detection of oil thickness and water mixture ratios (or volume percentages), where progress is limited due to lack of available field measurement techniques, or knowledge about how oil thickness can be related to its distribution, oil type, water content and sea conditions [
30]. Few works focus on quantitatively estimating the oil–water mixtures in oil slicks. Recently co-pol (co-polarization) ratio denoted as HH/VV, at low frequency (e.g., L-band) is proposed as a useful quantity to measure the volume percentage because the ratio is independent of the surface roughness or the ocean wave spectra, and depends on incidence angles and the complex dielectric constant of the medium with the tilted-Bragg scattering model [
31,
32,
33].
In fact, there are two ways that oil can reduce the SAR backscatter intensity [
27,
31]. Firstly, oil can smooth the small scale wind-driven surface roughness, which will dampen the short gravity wave spectrum. Compared with the surrounding clean water under the same environmental conditions, oil will cause a reduction in the reflected energy that is directed back to the radar antenna. Secondly, because the absolute value of the real and imagery components of the complex dielectric constant of crude oil is much lower than that of sea water, then if oil is mixed into the water, the effective dielectric constant is lowered relative the surrounding clear water, which also can reduce the total reflected energy [
9]. However, most oil spills are too thin for their dielectric properties to significantly influence the backscattered power. A reduction in the total reflected energy over the sea surface will take place when oil mixes with water at a high enough concentration and in a sufficiently thick layer [
10,
34,
35,
36]. The co-pol ratio can separate the effects of the reduced dielectric constant from the dampening of the surface roughness. Therefore, co-pol SAR observations can be used to measure the mixture ratio in thick oil slicks [
31,
32,
33].
However, the co-pol ratio method cannot be extend to HP SAR observations directly because we cannot link the elements in HP covariance matrixes with the co-pol ratios directly [
16,
37]. Collins et al. [
38] used the HH/VV ratio to estimate the oil–water mixture ratio from emulated HP data, by building a pseudo QP covariance matrix. Nevertheless, building of the pseudo QP matrix is still open to question, and for remotely sensed data, assumptions used in the reconstruction process may not be valid [
37,
39]. For these reasons, we do not discuss further the reconstructed method of HP data for oil spill detection and monitoring.
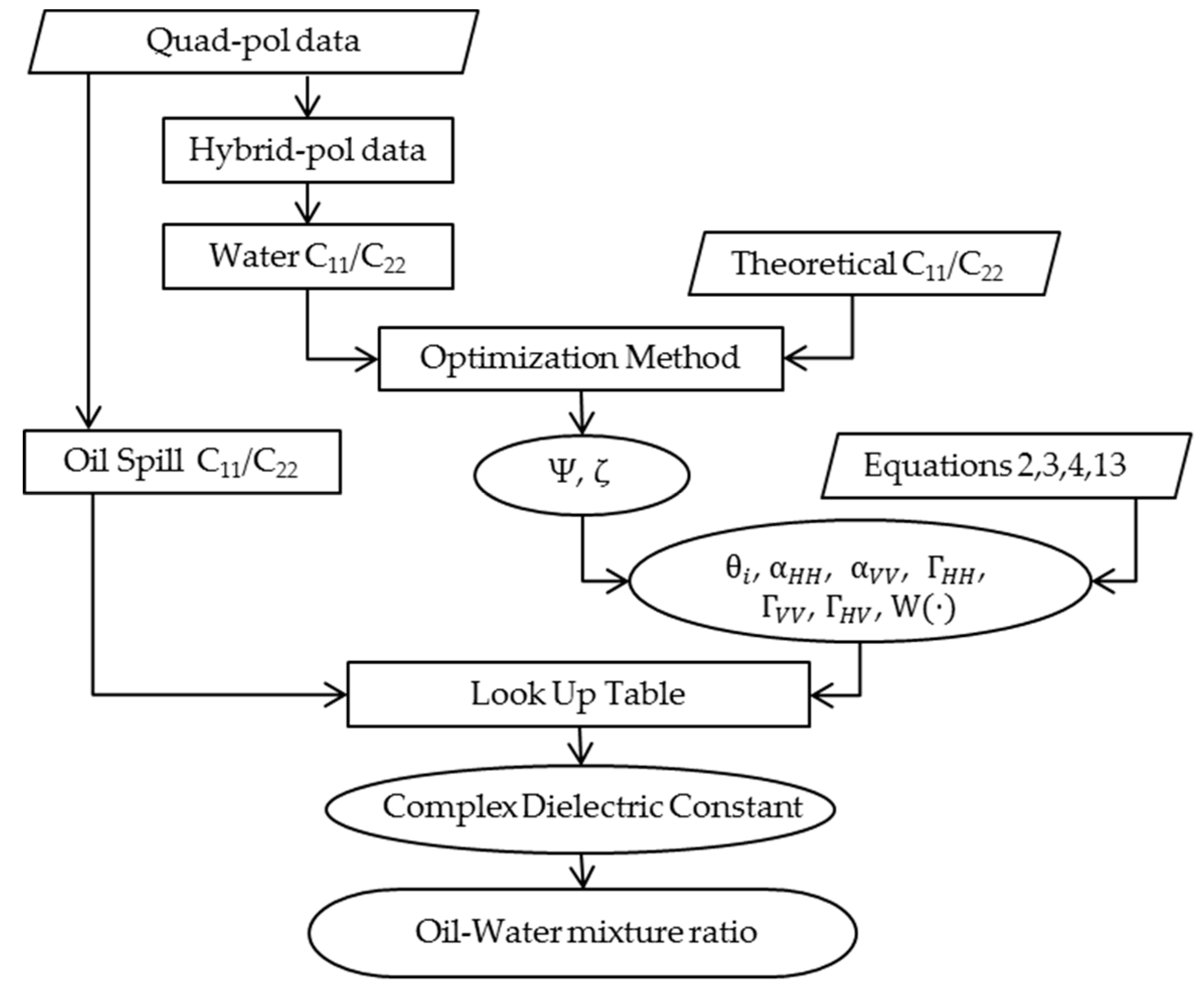
Here, we attempt to retrieve mixture ratio information for oil spills from HP mode CP SAR data. The relationship between the HP covariance matrixes and those of QP imagery was proposed by Raney [
16]. These relationships have facilitated the simulation of HP imagery from QP observations. Thus, the CP SAR data can be obtained before the launch of RCM. However, the relationships among the elements of covariance matrix for CP SAR and those for QP observations are complex, and the emulated covariance matrix and the related elements for CP SAR cannot be directly used for mixture ratio retrieval. Therefore, we establish the relationship between the diagonal element ratio of the HP mode CP covariance matrix and that of the QP Sinclair matrix [
37]. These variables appear in the ratio of the diagonal elements of the HP covariance matrix, and they are quite similar to those appearing in the co-pol ratio in the QP Sinclair matrix; moreover, they are also independent of ocean wave spectra and only depend on the dielectric constant, incidence angles and slopes of long ocean waves. Therefore, the ratio of the diagonal elements of the HP covariance matrix has the potential to provide estimates for the mixture ratio of oil spills.
Hence, in this study we extend these methods to estimate the oil spill mixture ratio using CP data, by using the diagonal elements and the ratio of the diagonal elements in the covariance matrix of the HP mode CP data directly. Firstly, in
Section 2 we review the basic theory [
40] and present the scattering matrix for QP and the covariance matrix for HP SAR data. In
Section 3, the relationship between the diagonal elements ratio of the CP covariance matrix and that of the QP Sinclair matrix is established; then we develop the relationships between the dielectric constant and the ratio of the diagonal elements of HP SAR data and present a model for simulation of water and oil spills based on the tilted-Bragg scattering model. The steps for estimating the oil–water mixture ratio are also given. The non-linear and non-constrained numerical optimizations, as well as look up table methods, are proposed in order to calculate the oil–water mixture ratio from HP data. The data are presented in
Section 4. Results are compared with those obtained from QP observations in
Section 5. Discussion and conclusions are presented in
Section 6 and
Section 7.
4. Test Cases
The Deep Water Horizon (DWH) accident, one of the world’s largest accidental oil pollution events, occurred in the Gulf of Mexico in 2010 releasing over 4.9 million barrels of oil at a depth of 1500 m below the water surface and affecting an ocean area larger than 10,000 km
2 [
34,
46,
47]. Because of the very large amount of oil, the huge area of coverage, and a very long continued time over which the spill occurred, the oil properties changed over time due to weathering and in spatial extent and thickness of the coverage. Oil thicknesses varied between 0.1 mm and 2 mm, and were observed through AVIRIS, a fine-resolution National Aeronautics and Space Administration (NASA) hyperspectral sensor and in situ observations [
10]. Much thicker layers of oil were observed compared to previous oil spills studied with radar remote sensing.
DWH disaster provided a unique opportunity to study the characteristics of oil spills. Besides L-band Uninhabited Aerial Vehicle SAR (UAVSAR) and ALOS-2 data, there were also measurements via X-band COSMO–SkyMed and TerraSAR and C-band RS-2 that were collected [
5,
12,
46]. There are many studies related to oil spills based on measurements collected in the DWH disaster. These include oil spill detection [
5,
6], classification [
11] and estimated retrievals of the mixing ratio [
10,
31]. Migliaccio and Nunziata [
47] studied the spatial variability of their damping properties based on the polarimetric parameter pedestal. Meanwhile, the 715 SAR images taken during the DWH spill have been analyzed and processed in order to detect oil slicks near shorelines, even in sheltered areas [
48]. Even a new model for the biodegradation kinetics of oil droplets has been proposed based on observations collected in the DWH event [
49].
Here, in this study, two multiple look complex (MLC) L-band UAVSAR data images collected on 23 June 2010 over the former site of the DWH drilling rig are used. The two flight lines are gulfco_14010_10054_100_100623 (
hereafter denoted 14,010) and gulfco_32010_10054_101_100623 (
hereafter, 32,010), respectively. The former passed directly over the DWH site with a heading of 140°, while the latter passed immediately to the west of, and parallel to 14,010, along 320° heading. They were observed at 20:42 UTC and 21:08 UTC on 23 June 2010, respectively. The time difference between the two SAR images is 26 min. The wind speed and wind direction were about 2.5–5 m/s and 115°–126°, respectively, as observed by buoy # 42012 (30°39’N, 87°33’18”W) and National Oceanic and Atmospheric Administration (NOAA) wave forecasts [
10]. Details regarding the two SAR images are given in the references [
10,
11].
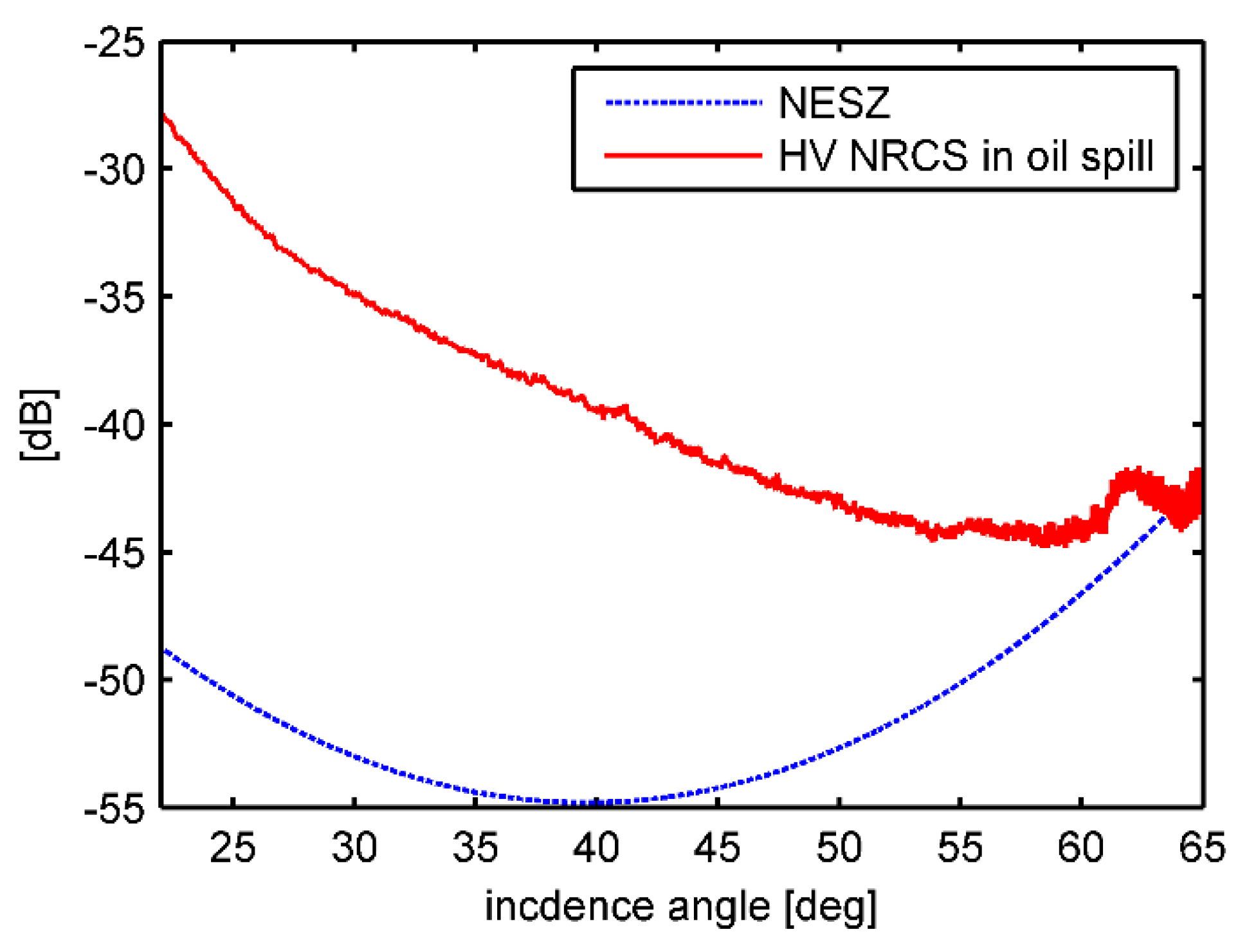
The UAVSAR can work for QP modes and provide images along a 22-km-wide ground swath at 22°–65° incidence angles. The NRCS of the HH, HV and VV have 3 range (cross-track) and 12 azimuth (along the track) looks and a pixel spacing of 5 m in slant range and 7.2 m in azimuth. The noise equivalent sigma zero (NESZ)
of the system is −55 dB at its minimum, near the mid-range of the swath ([
10], or in the
Appendix A). The UAVSAR is radiometrically calibrated to better than 1 dB in calibration bias, 0.7 dB in residual RMS calibration error, the phase calibration is about 5.3°, the co-pol channel imbalance error is 0.04 (linear units), and the leakage of the co-pol mode into the cross-pol mode is in the order of −30 dB [
50]. The UAVSAR high-resolution full polarization capability, combined with an extremely low noise floor and good calibration makes it excellent for polarimetric SAR studies, such as for experimental studies of low backscattering targets like oil spills. Using such high-quality QP data, the backscattering coefficients of HP data can be obtained, based on Equation (13), as well as the derived elements of the covariance matrix of the HP mode CP data. No assumptions are made regarding the emulated HP data from the QP observations [
16].
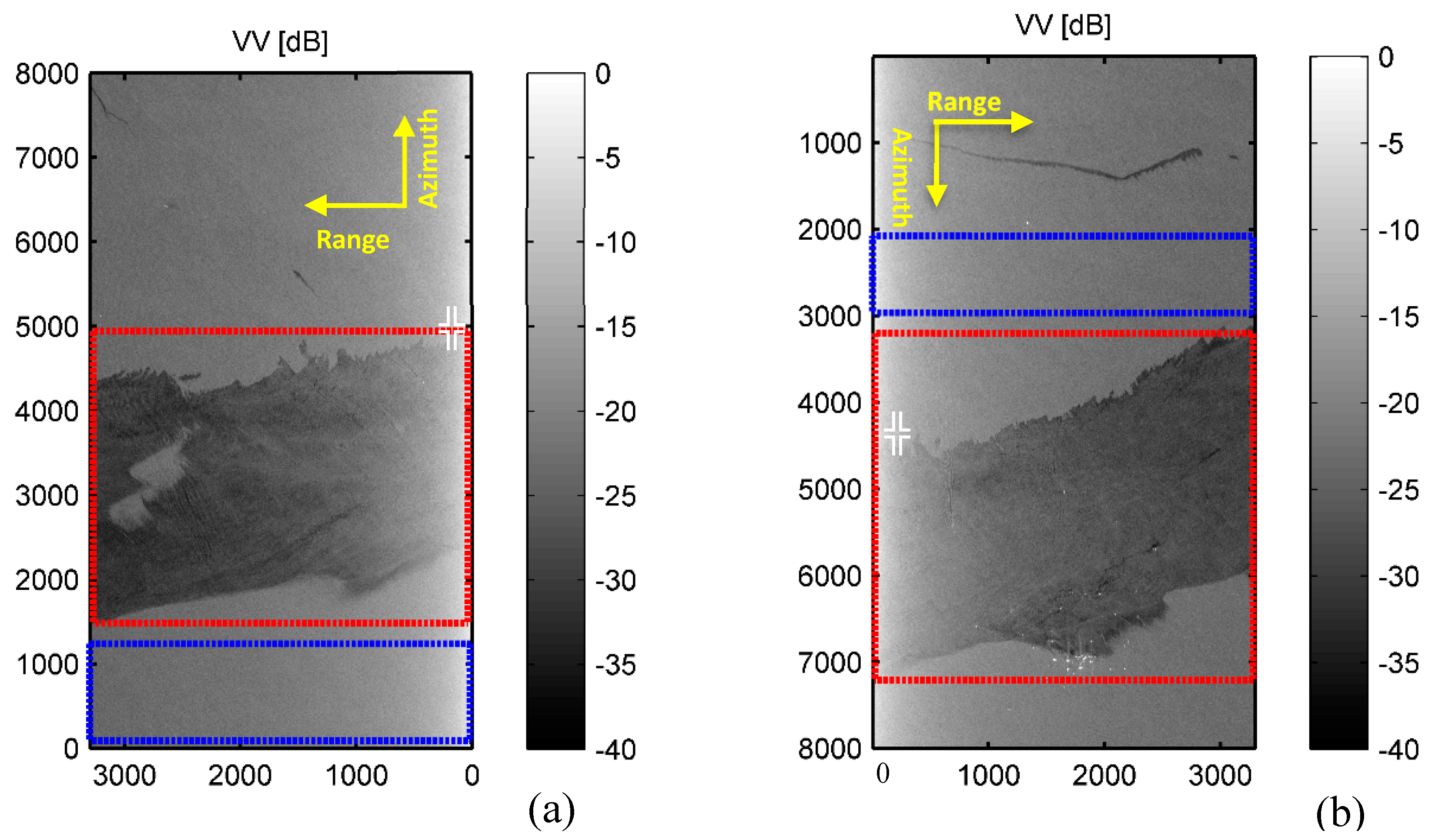
VV polarization UAVSAR images are shown in
Figure 3.
Figure 3a,b denote tracks 32,010 and 14,010, respectively. For reference, the bold crosses ╬ in these two images show a common point in the overlap region of the two swaths. The DWH oil rig is at the bottom of the spill area in
Figure 3b, near radar coordinates (1800, 6400). The surface vessels and platforms near the DWH rig site are denoted by the tiny bright points in the water. Other surface vessels are indicated as isolated bright points elsewhere in the image, often with disturbed oil in their wake. Horizontal and vertical coordinates correspond to range and azimuth directions, respectively. The blue and red rectangles in
Figure 3a,b are the oil free and oil-covered areas, as mentioned in the list of steps to retrieve the oil–water mixture ratio, respectively. They are used in the following analysis.
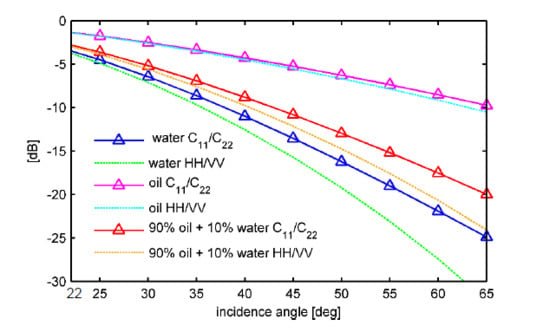
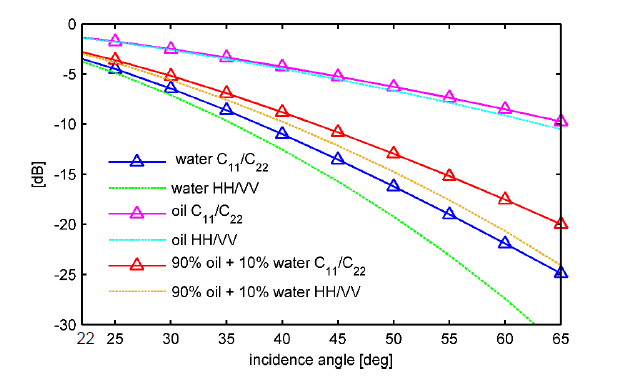
Figure 4 presents the variations of C
11/C
22 and HH/VV for oil spills and clean water areas from the DWH spill disaster with incidence angles indicated. The water and oil spill areas are the blue and red dotted - line rectangles in
Figure 3, respectively. Both C
11/C
22 and HH/VV decrease with increasing incidence angles, when incidence angles are lower than 60°, for oil spill areas and oil-free water. The trends in
Figure 4 for SAR observations are similar to trends in the theoretical results in
Figure 1 when incidence angles are lower than 60°. The consistency of the theoretical and observation results demonstrates the potential applications of the theoretical model.
When incidence angles are larger than 60°, the variations are complicated, especially, for the oil-covered areas for C
11/C
22 and HH/VV; they first decrease then increase with increasing incidence angles. The similar increasing and decreasing of HH/VV for oil spill areas with incidence angles has also been shown in oil 2 of Figure 8 in [
10]. Minchew et al. [
10] attributed this behavior to the inhomogeneous distribution of the oil spill. [
34,
46,
47] have pointed out the inhomogeneous properties noting that the “DWH polluted area includes oil slicks of different thicknesses, emulsified oil, weathered oil, oil/dispersant mixture, fresh oil, etc., the surface slick is very heterogeneous, including different kinds of surfactants.”
5. Results and Analysis
As mentioned in
Section 4, before the mixture ratio of the oil spill can be calculated, we estimate the tilt of the Bragg scattering planes
ψ and
ζ by fitting the C
11/C
22 curve, using numerical optimization based on the tilted-Bragg scattering model for the oil-free areas, and assuming a dielectric constant of 80 − 70
for sea water. The RMS wave slopes, calculated as the RMS of
ψ and
ζ from the HP mode CP SAR data, are 10.73° and 9.24° for tracks 14,010 and 32,010, respectively. These values are close to the RMS wave slopes 9.07° and 13.35° obtained by the HH/VV ratio from original QP observations [
10]. We obtain the ocean spectral density
in the oil-free area, by optimization fitting, using the estimated ocean surface wave slopes,
, and
based on Equation (16). C
22 (VV) is used for the inversion because the values are larger than those of the C
11 (HH) data.
With ocean wave spectral density
and parameters
, ,
,
,
,
and
, we can obtain the elements of the HP covariance matrix C
11 and C
22 using numerical optimization following Equations (1), (13) and (16).
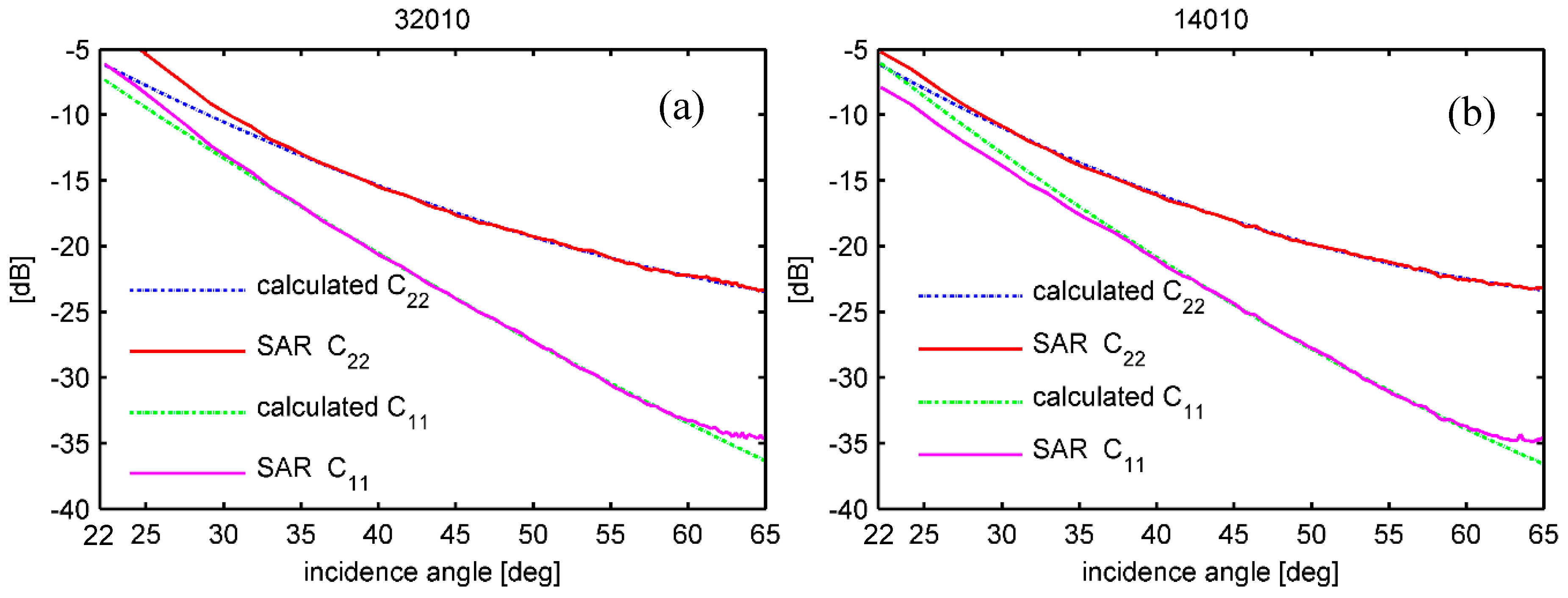
Figure 5 compares the calculated C
11 and C
22 with those obtained from emulated CP SAR data directly. For both tracks 32,010 and 14,010, when the incidence angles are larger than 35°and less than 60°, the calculated values for C
11 and C
22 almost overlap those from the HP SAR observations.
All the above computations are performed for the oil-free (water) areas, indicated by the blue rectangles in
Figure 3. The key parameters are related to the wave slope. The consistency of the calculated RMS wave slope, and the agreement of the elements of the HP covariance matrix obtained, using the proposed method, with those of the HP SAR observations, demonstrate the feasibility of the proposed methodology. The following calculation will be made for the oil-covered area to estimate the oil water mixture ratio using the ratio C
11/C
22, which decouples the effects of oil on the complex dielectric constant, from the effects of surface roughness.
The oil–water mixture ratio look up table is established based on steps (6)–(7), using the slope angles ψ and ζ in the oil-free water area, substituting and into the relation . Thus, the oil–water mixture ratio can be evaluated based on steps (8) and (9).
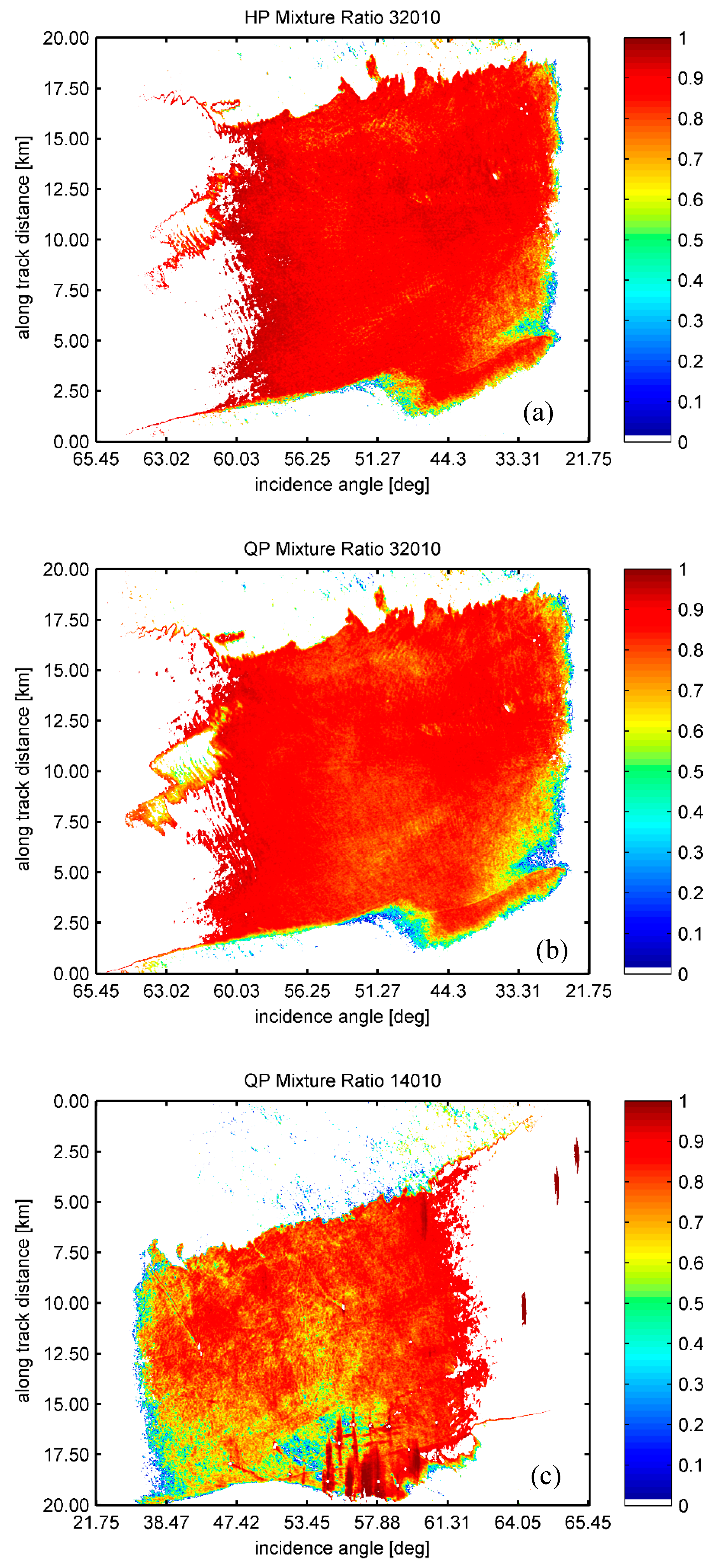
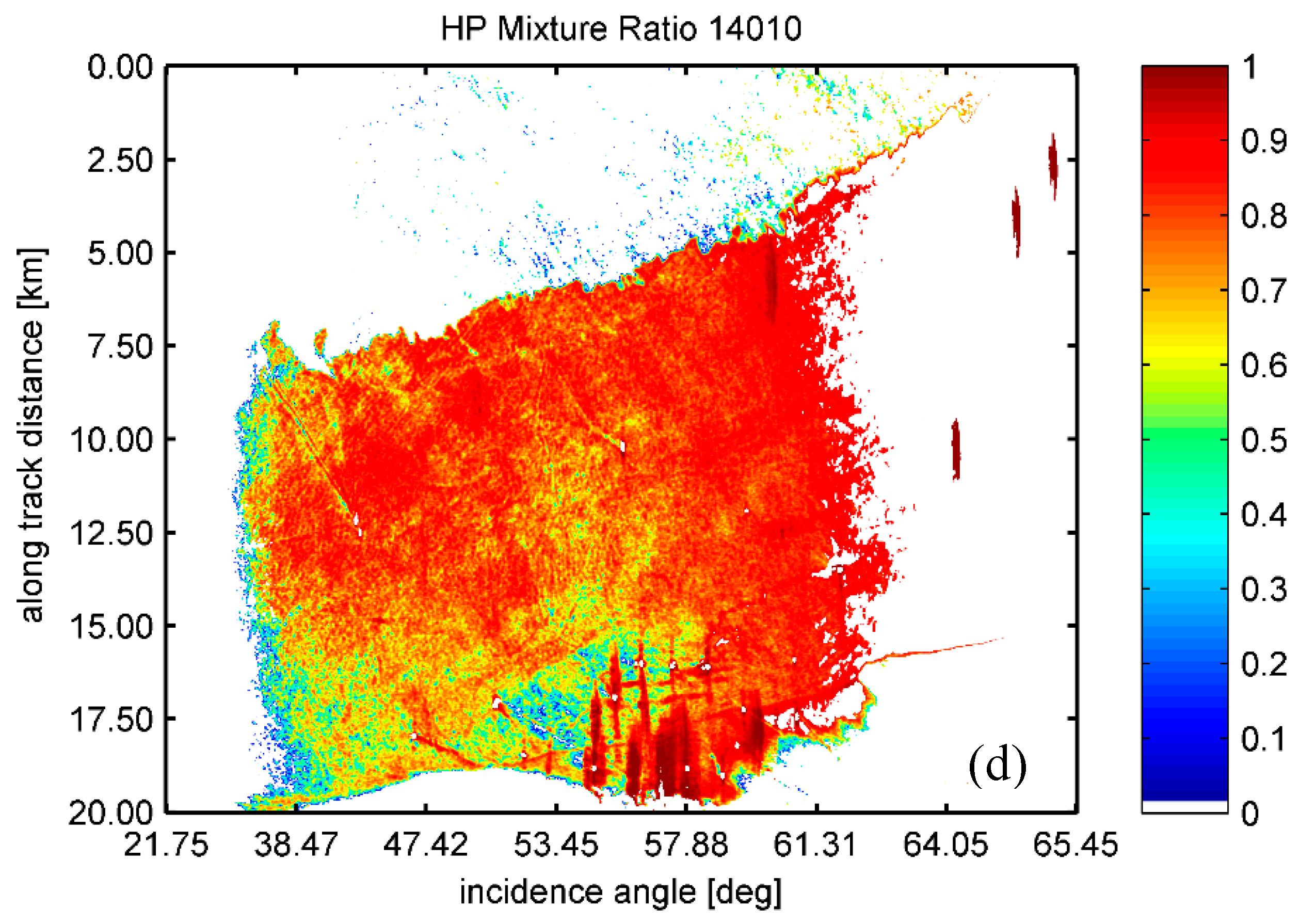
The spatial patterns of the mixture ratio of the oil spills denoted with red rectangles in
Figure 3 are shown in
Figure 6.
Figure 6a,b are results for track 32,010 with QP and HP data, respectively, whereas
Figure 6c,d are results for track 14,010, also with QP and HP data. The mixture ratios estimated with the proposed ratio C
11/C
22 from the HP data are comparable, in terms of their spatial patterns, with the evaluations from HH/VV from the QP observations. Consistency between the two methods is observed, especially for track 14,010. To make the comparison easy, the color scales in all panels are the same.
A slight overestimation in the mixture ratio from HP in track 32,010 can be observed in
Figure 6a. The primary reason for the overestimation in these results is because of the inaccuracy of the wave slope angles and application of the same wave slope assumption in both oil spill areas and oil-free areas. This result may be also due to the entirety of the complicated mixing process of oil spills in DWH [
46] and interactions between the oil and the waves [
51]. Ocean waves typically have periods of less than a minute. During the acquisition of the SAR observations, the ocean waves imaged by SAR are therefore not strictly homogenous in space and time. Oil is known to mix with water through the actions of waves, wind and current; weathering and oil properties can change on timescales of hours to days due to the loss of volatiles, emulsification, entrainment of sediment, and other weathering processes [
52]. The fate and transport of spilt oil depends on biological, chemical, physical and hydrodynamic processes, as well as processes such as spreading, evaporation, emulsification, dispersion, advection, photo-oxidation, biodegradation, dissolution, encapsulation and sedimentation, which take place simultaneously after an oil spill [
11,
34,
51,
53]. These processes are complex, sometimes self-competing and always simultaneous. The diversity and variability of oil spills requires different types of processing algorithms [
54]. The tracks 32,010 and 14,010 have different locations, with 26 min difference in imaging times. Thus, these tracks may represent different stages in the oil spill aging processes. Minchew et al. [
10] have suggested that the reason for the difference in the apparent oil–water mixture ratios between the two flight lines could indicate less complete mixing in track 14,010 which is closer to the DWH site. This point can be observed from the difference of the spatial patterns of the mixture ratios in
Figure 6a,c. Overall, the mixture ratios for track 32,010 are higher than those of track 14,010. Till now, the characteristics of the different stages of oil spill development have not been taken into account in this study. Nonetheless, comparable results for both cases, with HH/VV and C
11/C
22 methods, highlight the utility of C
11/C
22 for estimates of oil spill mixture ratios.
When the incidence angle is below approximately 26°, specular scattering is dominant for L band [
10]. As a result, little information is available in these data that can characterize oil and water based on Bragg scattering. Data at high incidence angles are also considered to illustrate the NESZ influence [
10]. The noise analysis has been shown in Figure 7 of [
10], by plotting the backscattered signals and the estimated NESZ versus the incidence angle. Moreover, when simulating the HP data from the QP data, a 3-dB power loss is introduced due to
in Equation (12) [
16]. In the worst scenario, noise contributes only a few percent to the total measured power at the high incidence angles. When NRCS values are close to, or lower than the noise floor, the mixture ratio cannot be estimated for high incidence angles. Thus, the mixture ratio is set to zero for lower and higher incidence angles. The reason for the former is that the area with lower incidence angle is dominated by specular scattering; the reason for the latter is that the NRCS of HV cannot reach 3 dB higher than the NESZ. The variation of NESZ and NRCS of HV of UAVSAR with the incidence angle are presented in Minchew et al. [
10] and Fore et al. [
50]. We provide that discussion in
Appendix A.
Scatter plots of the oil–water mixture ratio are shown in
Figure 7 as suggested by C
11/C
22 from HP mode CP SAR data and compared with QP UAVSAR observations.
Figure 7a,b denote cases 32,010 and 14,010, respectively. It is obvious that the mixture ratios for the two cases are different. In track 32,010, the values of most mixture ratios range from 0.7 to 0.9, and the pixels of the mixture ratio below 0.1 constitute only a small population. The reason for the location of the aggregation center with lower values is the small region of the open water area in
Figure 6. There are almost no pixels with mixture ratios for the range from 0.1 to 0.4 for track 32,010, while the mixture ratio ranges from 0 to 1 for track 14,010. However, all the data are almost symmetrically distributed along the diagonal line for both cases. Thus, the scatter plots describe how well the derived mixture ratios from CP data match those derived from QP observations.
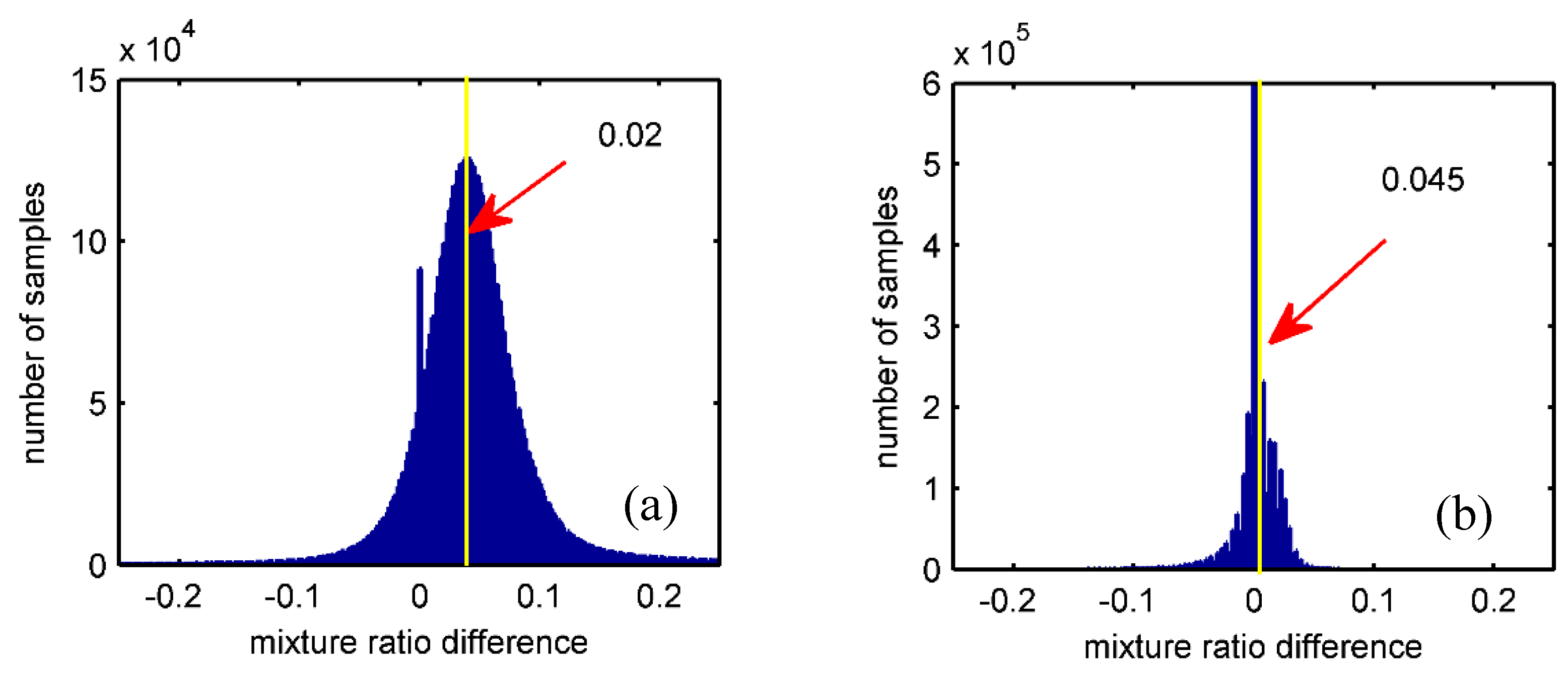
Moreover, mixing ratio estimates in
Figure 6 and
Figure 7 from C
11/C
22 are confirmed by histograms of the derived mixture ratio differences, displayed in
Figure 8. The aim of
Figure 8 is to demonstrate mixture ratio differences between QP and HP observations quantitatively. Variances result from estimates from HP mode SAR data, simulated from QP UAVSAR observations, and estimates from HH/VV based on quad-pol observations [
31].
Figure 8a,b represent the tracks 32,010 and 14,010, respectively. The results from HP mode CP data display overall good agreement with those retrieved from quad-pol data with the HH/VV ratio. However, there is statistical overestimation for the values of the mixture ratio from the HP SAR data, which are denoted by the yellow line; the exact value is marked near the line in each case. As mentioned above, possible reasons for overestimation are: (a) our assumption of the same wave slope in the oil-free area and in the oil spill area, and (b) ignoring the complex variation of the oil spill and ocean waves as mentioned in the description of
Figure 6. The statistical overestimation of track 32,010 is 0.02, while for track 14,010 the overestimation is 0.0045. The latter is one order of magnitude better than the former. The result is consistent with prior analysis. Statistically, the overestimation results are acceptable.
Statistical measures of the results are shown in
Table 1 giving the bias, correlation coefficients and RMS error of the mixture ratio estimates from the original QP observations, relative to the estimates from the emulated HP mode CP SAR data. The standard deviation measures the distribution width. Positive values for the bias indicate that the mixture ratio estimates from the emulated HP data are larger than estimates from the original QP data. The results for track 32,010 are inferior to those for track 14,010, with bias and RMS error of 0.09 and 0.14, and correlation coefficient, 0.71. This represents a moderately positive correlation. However, track 14,010 has a better performance in terms of the mixture ratio estimation, with bias and RMS error of the derived mixture ratio of 0.02 and also 0.02, respectively, and a correlation coefficient of 0.98. The results suggest that the methodology proposed here with CP data provides a reliable way to estimate the oil–water mixture ratio.
6. Discussion
Based on Equations (8) and (15), the co-pol ratio from the original QP data and the diagonal elements ratio from the covariance matrix of CP data are related to frequency through the complex dielectric constant. Moreover, when oil mixes with the water at a high enough concentration and in a sufficiently thick (emulsified) layer to reduce the effective dielectric constant of the sea surface, the proposed methodology can be used. Alpers et al. [
36] pointed out that in order for “the dielectric constant to have a non-negligible influence on the radar scattering, the oil layer must have a thickness exceeding 1/10 of the penetration depth.”
The penetration depth is defined as the depth at which the intensity of the radar signal inside the material falls off to 1/e (or about 37%) of its original value. The formula of penetration depth
is given as [
35,
36]:
where
is the complex dielectric constant of the medium, c represents the speed of light, ω is the angular frequency of the incident radiation and
indicates the imaginary component. Based on Equation (17), we knew that the penetration depth will variation with frequency and the complex dielectric constant. It should be noted
of seawater is dependent of frequency [
35]. However, Alpers et al. [
36] assumed that
does not change with the frequency, and thus the penetration depth will be proportion to the radar wavelength. Thus, the penetration depth of C-band is smaller than that of L-band for the same medium. Therefore, with respect to the penetration depth, we can safely draw the conclusion that the methodology proposed here can be easily applied to C-band observations.
The NESZ is another factor that should be taken into account. Oil spills dampen the power of the backscattered returning electromagnetic waves. The HV signal is ~10 dB below the HH and VV signal levels. Thus, having the HV signal above the noise floor is a key factor to determine whether the data can be used or not. In general, for the methodology in this paper to be valid, the values for the HH, VV and HV mode data must be above the noise level for both water and oil-covered areas. Moreover, the 3 dB power loss for simulation of the HP data from QP data should also be taken into account.
7. Conclusions
The HP CP SAR is a new SAR mode. RCM will be launched later in 2019 and will carry this kind of new SAR mode. The application of L-band HP mode CP SAR for oil–water mixture ratio estimation is explored in this paper. HP CP SAR data was emulated from high quality UAVSAR QP observations. The covariance matrix elements and diagonal element ratios C
11/C
22 from HP SAR are presented in this study to estimate the oil–water mixture ratio. The basic idea is that ocean wave spectra, which describe the roughness of the ocean surface, are the common factor in the C
11 and C
22 variables, which are the elements from the CP covariance matrix. Therefore, the ratio C
11/C
22 of these elements from the CP covariance matrix is independent of ocean surface roughness, and only depends on incidence angle, RMS wave slope and complex dielectric constants, based on the tilted Bragg scattering model [
40]. Thus, the ratio C
11/C
22 from the HP CP SAR covariance matrix decouples the effects of oil on ocean surface roughness from the effects of the complex dielectric constant. These properties have similar characteristics to the ratio HH/VV, which has been used for evaluating the oil water mixture ratio [
31,
32,
33]. This point was confirmed by the similar trend in variations between the UAVSAR observations and the theoretical model results. Thus, we suggest that there is potential for C
11/C
22 from the HP mode CP SAR data for estimation of the oil–water mixture ratio.
The slope angles ψ and ζ obtained from HP data are close to those obtained from QP data. Meanwhile, the C11 and C22 calculated with wave spectra density, incidence angle and slope angles are consistent with those from the UAVSAR QP data. Moreover, it is very encouraging that the oil–water mixture ratio is in overall agreement for the results obtained from CP data with those obtained from QP data. Despite the good overall agreement, systematic overestimations and regionally dependent deviations are clearly visible. These may be due to the complexity, diversity and variability of oil spills and ocean waves. Although not applicable for quantitative assessment of the influences of such factors, the proposed C11/C22 from HP mode SAR data has demonstrated a potential application for estimation of the oil–water mixture ratio for oil spills on the ocean surface.
As mentioned previously, the NESZ is an important factor which should be taken into account for the damping effect of oil spill. Moreover, extensions of the method to other cases need further study because the DWH spill disaster represents a situation unlike any previous event. The measurements in NORSE2015 maybe good cases.


 .
.










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}