Individual Grapevine Analysis in a Multi-Temporal Context Using UAV-Based Multi-Sensor Imagery


Abstract
:
1. Introduction
2. Materials and Methods
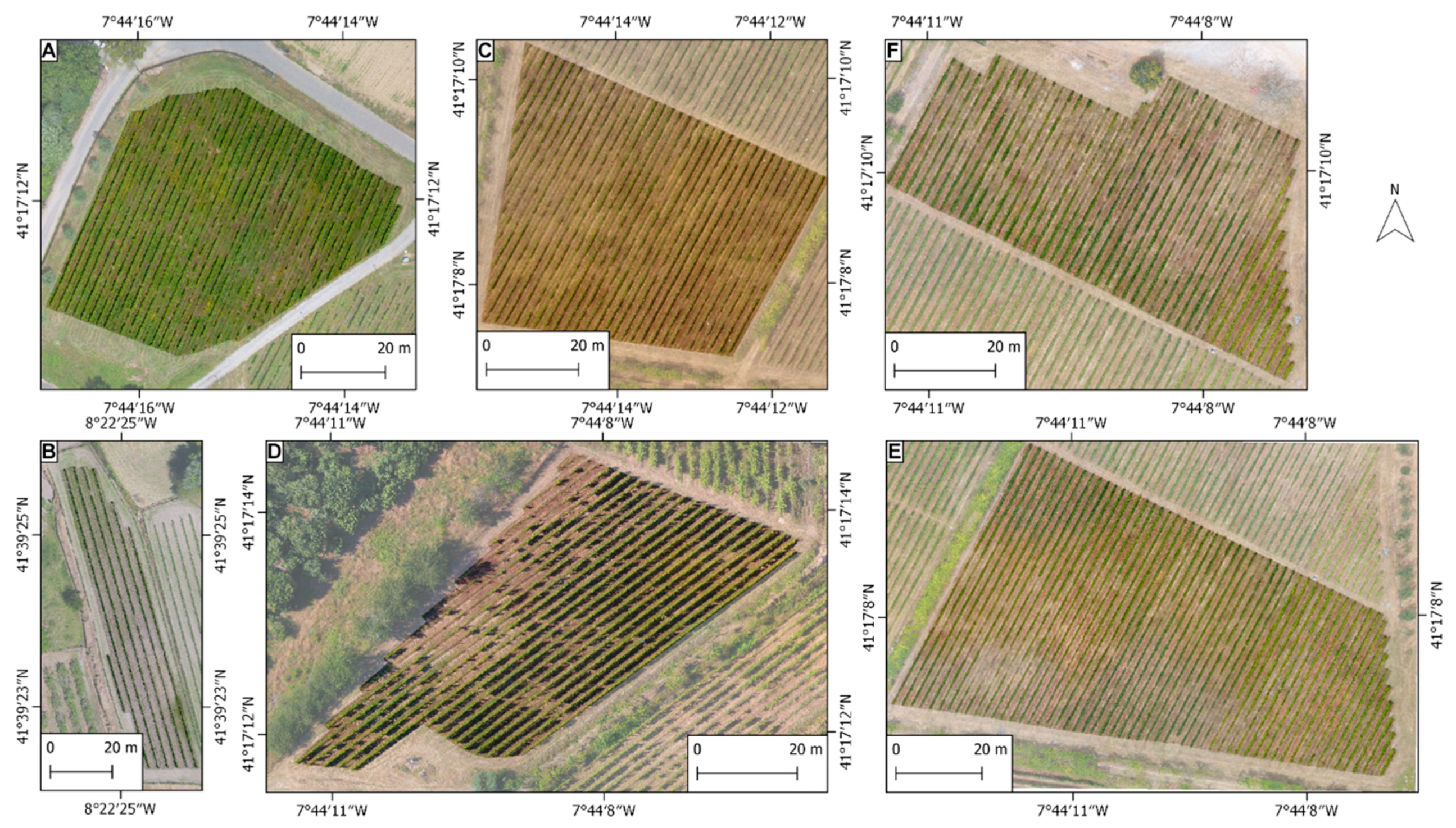
2.1. Data Acquisition
2.1.1. Validation Dataset
2.1.2. Multi-Temporal Dataset
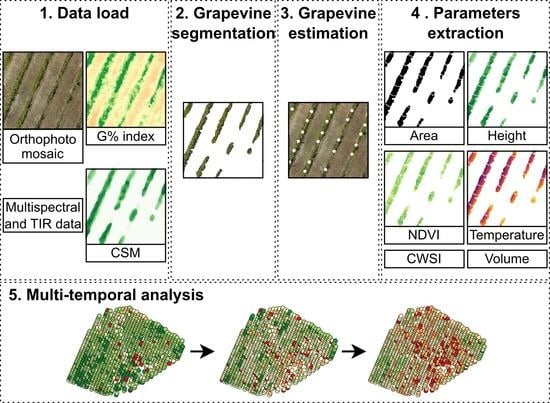
2.2. Data Processing
2.2.1. Data Pre-Processing
2.2.2. Vine Rows Estimation and Individual Grapevine Estimation
2.2.3. Parameters Extraction
- the area of each grapevine, which is computed by the number of pixels present in each cluster from E multiplied by its squared GSD value;
- the grapevine height, these values are extracted from the CSM, only retrieved in the pixels of E (the remaining CSM pixels are not considered), mean, maximum and minimum values are estimated;
- the volume of the grapevine, it is estimated using both height and area, the different height estimates (mean, maximum and minimum estimated height values) are used to calculate different volume values;
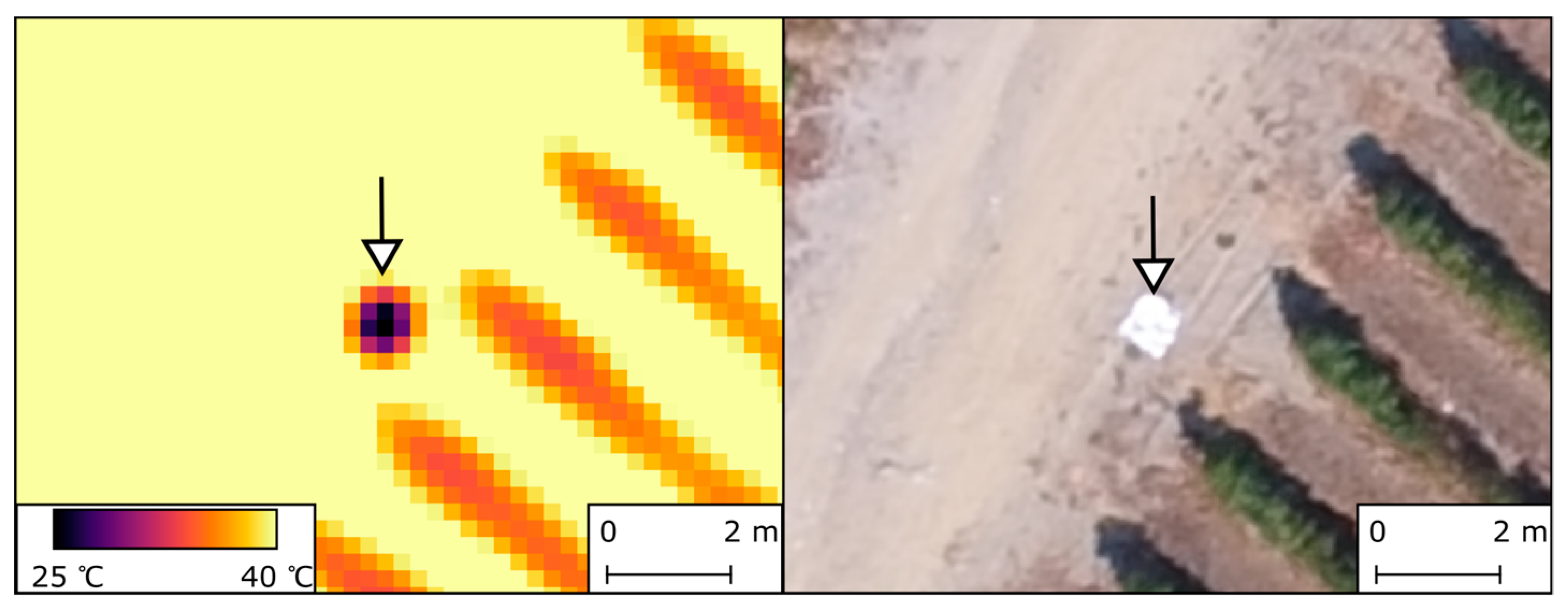
- features are driven from multispectral and TIR imagery, in the case of this study, NDVI, LST and CWSI are masked according to E and its mean, maximum and minimum values are estimated;
2.2.4. Multi-Temporal Analysis
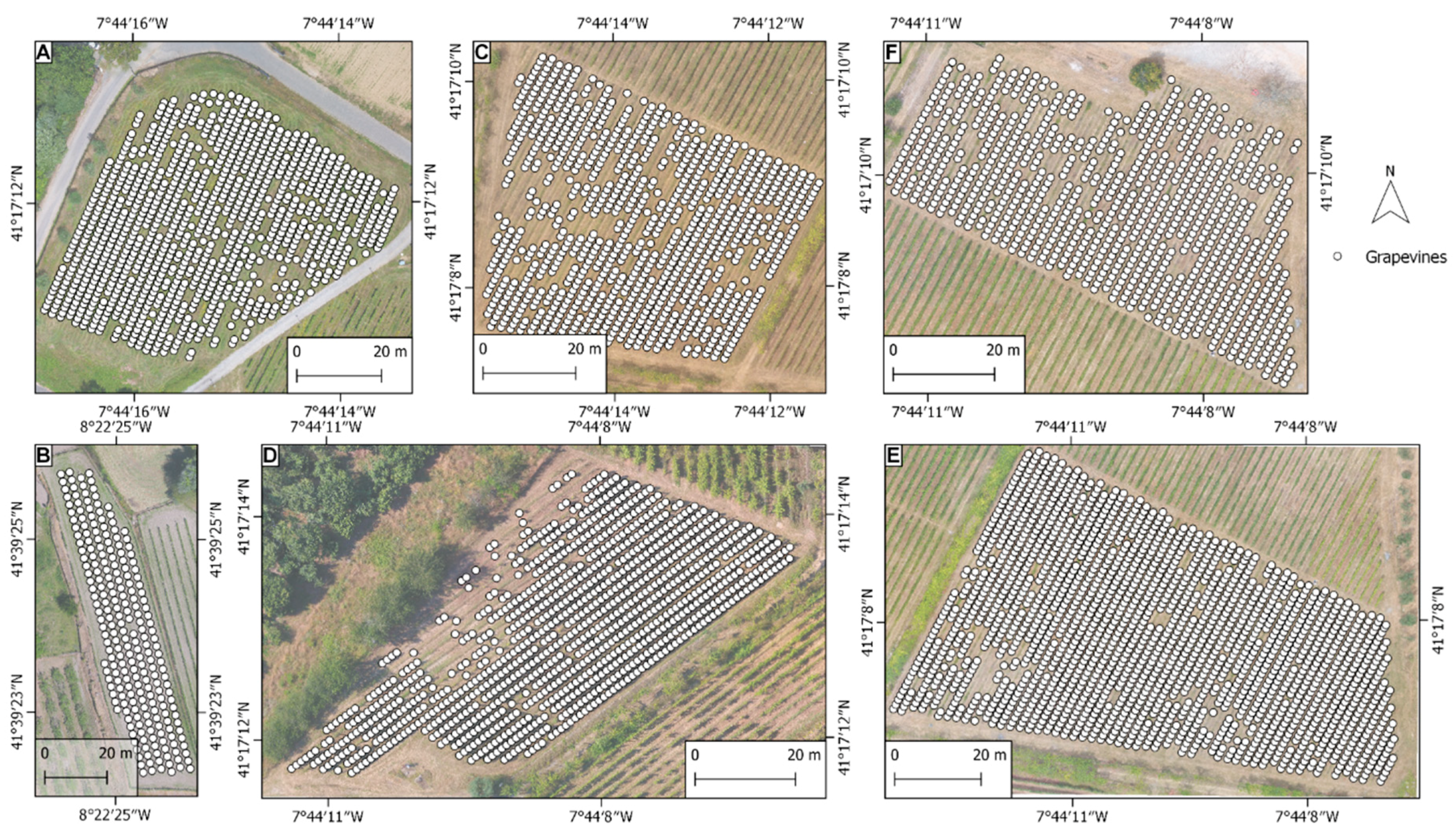
2.3. Grapevine Counting Accuracy
- the total number of estimated grapevines, this value helps to understand the robustness of the method, by considering the total number of grapevines for an analysed vineyard plot;
- the number of existing plants, by cross-referring the actual number of plants observed in-field with the ones estimated from the method; and
- the number of missing grapevines, i.e., grapevines that were missing causing a canopy gap in the vine row.
- precision, the fraction of estimated grapevines that are correctly estimated (TP) rather than wrongly estimated (FP);
- recall, the fraction of grapevines that are correctly detected rather than wrongly estimated;
- false negative rate (FNR), percentage of grapevines falsely classified as being missing;
- F1score, the harmonic mean of precision and recall measures; and
- overall accuracy, considering all correctly estimated grapevines and missing grapevines in all data.
2.4. Data Alignment
3. Results
3.1. Grapevine Counting Accuracy
3.2. Multi-Temporal Vineyard Monitoring
3.2.1. Data Alignment
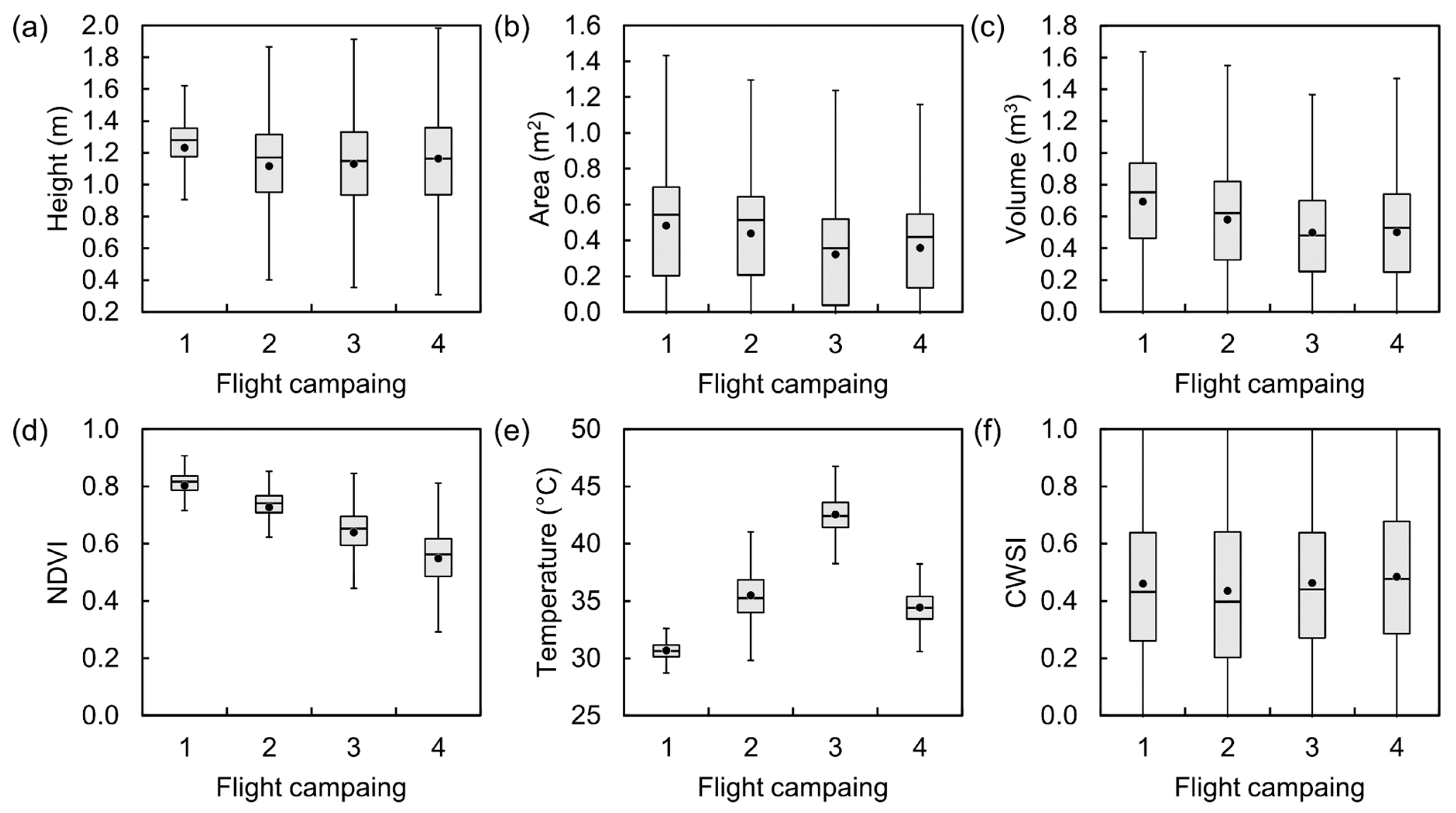
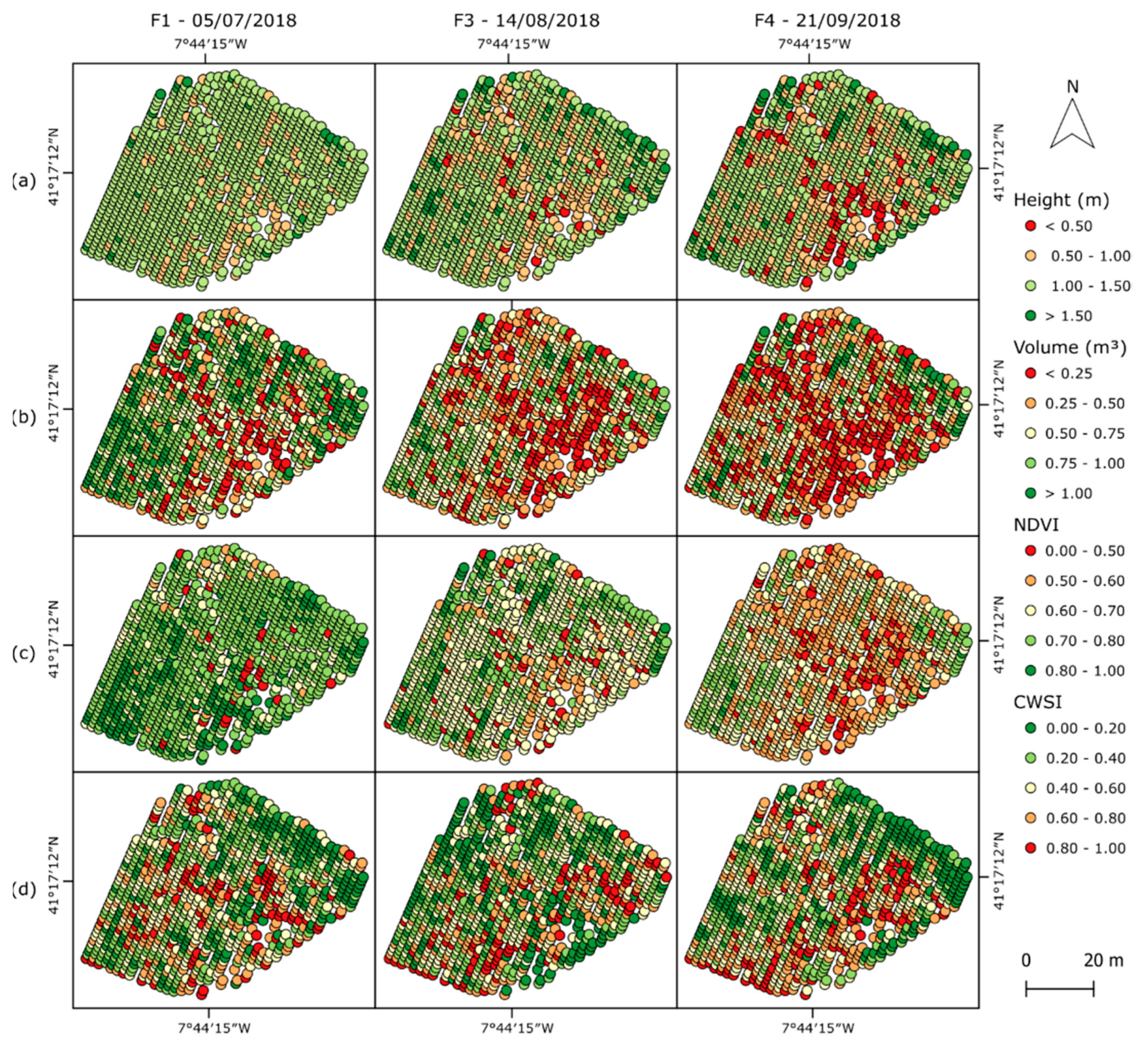
3.2.2. Vineyard Plot A
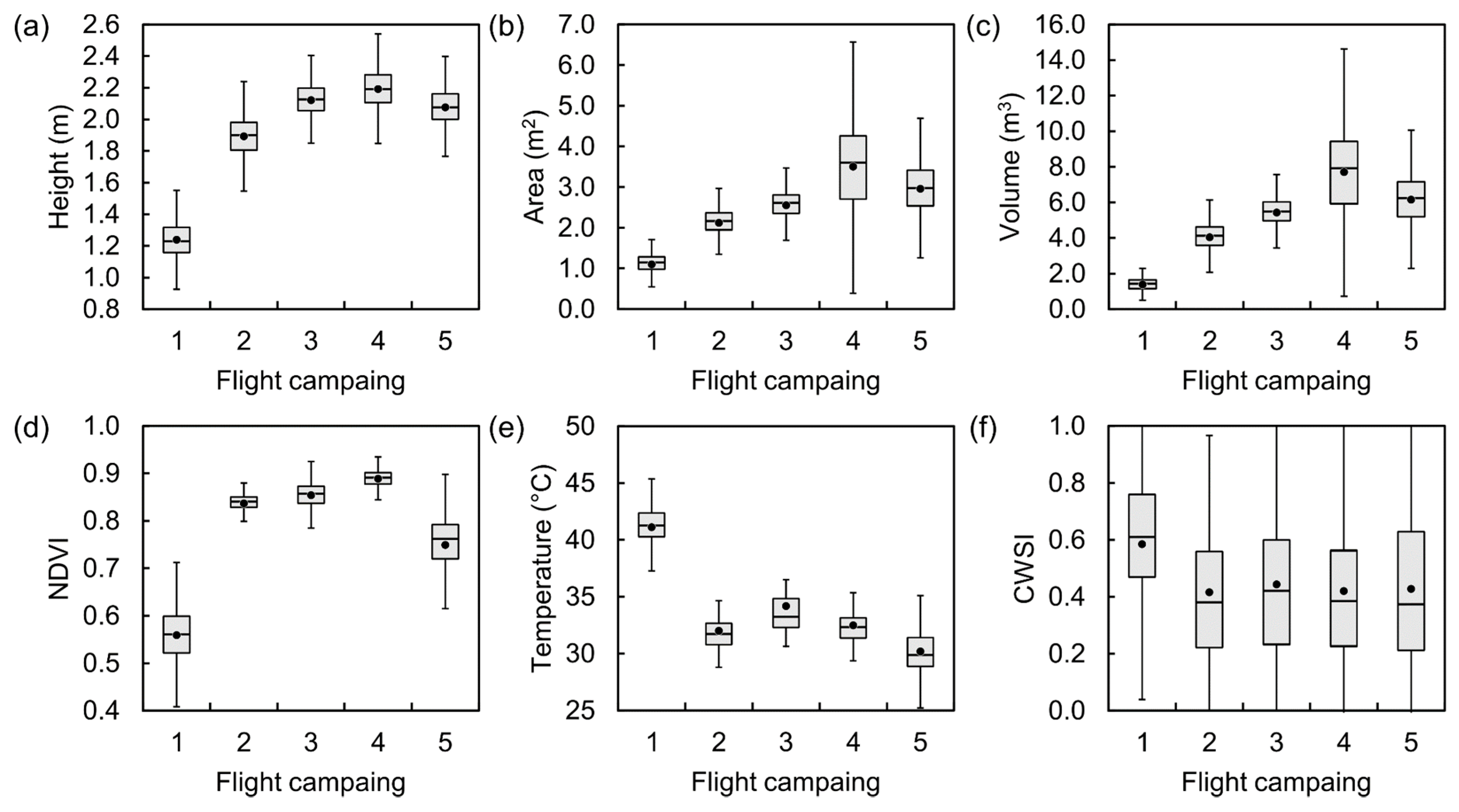
3.2.3. Vineyard Plot B
4. Discussion
4.1. Grapevine Counting Accuracy
4.2. Data Alignment
4.3. Multi-Temporal Vineyard Monitoring
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Proffitt, A.P.B.; Bramley, R.; Lamb, D.; Winter, E. Precision Viticulture: A New Era in Vineyard Management and Wine Production; Winetitles: Ashford, Australia, 2006; ISBN 978-0-9756850-4-4. [Google Scholar]
- Zarco-Tejada, P.J.; Hubbard, N.; Loudjani, P. Precision Agriculture: An Opportunity for EU Farmers-Potential Support with the CAP 2014–2020; Joint Research Centre (JRC) of the European Commission Monitoring Agriculture ResourceS (MARS): Brussels, Belgium, 2014. [Google Scholar]
- Matese, A.; Di Gennaro, S.F. Technology in precision viticulture: A state of the art review. Int. J. Wine Res. 2015, 7, 69–81. [Google Scholar] [CrossRef] [Green Version]
- Zhang, C.; Kovacs, J.M. The Application of Small Unmanned Aerial Systems for Precision Agriculture: A Review. Precis. Agric. 2012, 13, 693–712. [Google Scholar] [CrossRef]
- Steyn, J.; Tudó, J.L.A.; Benavent, J.L.A. Grapevine vigour and within vineyard variability: A review. Int. J. Sci. Eng. Res. 2016, 7, 1056–1065. [Google Scholar]
- Karakizi, C.; Oikonomou, M.; Karantzalos, K. Spectral Discrimination and Reflectance Properties of Various Vine Varieties from Satellite, UAV and Proximate Sensors. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2015, 40, 31. [Google Scholar] [CrossRef] [Green Version]
- Tisseyre, B.; Ojeda, H.; Taylor, J. New technologies and methodologies for site-specific viticulture. J. Int. Des. Sci. De La Vigne Et Du Vin 2007, 41, 63–76. [Google Scholar] [CrossRef]
- Martín, P.; Zarco-Tejada, P.; González, M.; Berjón, A. Using hyperspectral remote sensing to map grape quality inTempranillo’vineyards affected by iron deficiency chlorosis. Vitis-Geilweilerhof 2007, 46, 7. [Google Scholar]
- Hall, A.; Lamb, D.W.; Holzapfel, B.; Louis, J. Optical remote sensing applications in viticulture-a review. Aust. J. Grape Wine Res. 2002, 8, 36–47. [Google Scholar] [CrossRef]
- Johnson, L.; Roczen, D.; Youkhana, S.; Nemani, R.; Bosch, D. Mapping vineyard leaf area with multispectral satellite imagery. Comput. Electron. Agric. 2003, 38, 33–44. [Google Scholar] [CrossRef]
- Johnson, L.F.; Roczen, D.; Youkhana, S. Vineyard canopy density mapping with IKONOS satellite imagery. In Proceedings of the Third International Conference on Geospatial Informationin Agriculture and Forestry, Denver, CO, USA, 5–7 November 2001. [Google Scholar]
- Matese, A.; Primicerio, J.; Di Gennaro, F.; Fiorillo, E.; Vaccari, F.P.; Genesio, L. Development and Application of an Autonomous and Flexible Unmanned Aerial Vehicle for Precision Viticulture. Acta Hortic. 2012, 978, 63–69. [Google Scholar] [CrossRef]
- Khaliq, A.; Comba, L.; Biglia, A.; Ricauda Aimonino, D.; Chiaberge, M.; Gay, P. Comparison of Satellite and UAV-Based Multispectral Imagery for Vineyard Variability Assessment. Remote Sens. 2019, 11, 436. [Google Scholar] [CrossRef] [Green Version]
- Mendes, J.; Dos Santos, F.N.; Ferraz, N.; Couto, P.; Morais, R. Vine Trunk Detector for a Reliable Robot Localization System. In Proceedings of the 2016 International Conference on Autonomous Robot Systems and Competitions (ICARSC), Braganca, Portugal, 4–6 May 2016; pp. 1–6. [Google Scholar]
- Milella, A.; Marani, R.; Petitti, A.; Reina, G. In-field high throughput grapevine phenotyping with a consumer-grade depth camera. Comput. Electron. Agric. 2019, 156, 293–306. [Google Scholar] [CrossRef]
- Rosell, J.R.; Llorens, J.; Sanz, R.; Arnó, J.; Ribes-Dasi, M.; Masip, J.; Escolà, A.; Camp, F.; Solanelles, F.; Gràcia, F.; et al. Obtaining the three-dimensional structure of tree orchards from remote 2D terrestrial LIDAR scanning. Agric. For. Meteorol. 2009, 149, 1505–1515. [Google Scholar] [CrossRef] [Green Version]
- Morais, R.; Fernandes, M.A.; Matos, S.G.; Serôdio, C.; Ferreira, P.J.S.G.; Reis, M.J.C.S. A ZigBee multi-powered wireless acquisition device for remote sensing applications in precision viticulture. Comput. Electron. Agric. 2008, 62, 94–106. [Google Scholar] [CrossRef]
- Matese, A.; Toscano, P.; Di Gennaro, S.F.; Genesio, L.; Vaccari, F.P.; Primicerio, J.; Belli, C.; Zaldei, A.; Bianconi, R.; Gioli, B. Intercomparison of UAV, Aircraft and Satellite Remote Sensing Platforms for Precision Viticulture. Remote Sens. 2015, 7, 2971–2990. [Google Scholar] [CrossRef] [Green Version]
- Pádua, L.; Vanko, J.; Hruška, J.; Adão, T.; Sousa, J.J.; Peres, E.; Morais, R. UAS, sensors, and data processing in agroforestry: A review towards practical applications. Int. J. Remote Sens. 2017, 38, 2349–2391. [Google Scholar] [CrossRef]
- Colomina, I.; Molina, P. Unmanned aerial systems for photogrammetry and remote sensing: A review. Isprs J. Photogramm. Remote Sens. 2014, 92, 79–97. [Google Scholar] [CrossRef] [Green Version]
- Rouse, J.W., Jr.; Haas, R.H.; Schell, J.A.; Deering, D.W. Monitoring Vegetation Systems in the Great Plains with Erts. Nasa Spec. Publ. 1974, 351, 309. [Google Scholar]
- Caruso, G.; Tozzini, L.; Rallo, G.; Primicerio, J.; Moriondo, M.; Palai, G.; Gucci, R. Estimating biophysical and geometrical parameters of grapevine canopies (‘Sangiovese’) by an unmanned aerial vehicle (UAV) and VIS-NIR cameras. VITIS J. Grapevine Res. 2017, 56, 63–70. [Google Scholar]
- Campos, J.; Llop, J.; Gallart, M.; García-Ruiz, F.; Gras, A.; Salcedo, R.; Gil, E. Development of canopy vigour maps using UAV for site-specific management during vineyard spraying process. Precis. Agric. 2019, 20, 1136–1156. [Google Scholar] [CrossRef] [Green Version]
- Matese, A.; Di Gennaro, S.F.; Santesteban, L.G. Methods to compare the spatial variability of UAV-based spectral and geometric information with ground autocorrelated data. A case of study for precision viticulture. Comput. Electron. Agric. 2019, 162, 931–940. [Google Scholar] [CrossRef]
- Idso, S.B.; Jackson, R.D.; Pinter, P.J.; Reginato, R.J.; Hatfield, J.L. Normalizing the stress-degree-day parameter for environmental variability. Agric. Meteorol. 1981, 24, 45–55. [Google Scholar] [CrossRef]
- Santesteban, L.G.; Di Gennaro, S.F.; Herrero-Langreo, A.; Miranda, C.; Royo, J.B.; Matese, A. High-resolution UAV-based thermal imaging to estimate the instantaneous and seasonal variability of plant water status within a vineyard. Agric. Water Manag. 2017, 183, 49–59. [Google Scholar] [CrossRef]
- Baluja, J.; Diago, M.P.; Balda, P.; Zorer, R.; Meggio, F.; Morales, F.; Tardaguila, J. Assessment of vineyard water status variability by thermal and multispectral imagery using an unmanned aerial vehicle (UAV). Irrig. Sci. 2012, 30, 511–522. [Google Scholar] [CrossRef]
- Bellvert, J.; Zarco-Tejada, P.J.; Girona, J.; Fereres, E. Mapping crop water stress index in a ‘Pinot-noir’ vineyard: Comparing ground measurements with thermal remote sensing imagery from an unmanned aerial vehicle. Precis. Agric. 2013, 15, 361–376. [Google Scholar] [CrossRef]
- Bellvert, J.; Marsal, J.; Girona, J.; Zarco-Tejada, P.J. Seasonal evolution of crop water stress index in grapevine varieties determined with high-resolution remote sensing thermal imagery. Irrig. Sci. 2015, 33, 81–93. [Google Scholar] [CrossRef]
- Tilly, N.; Hoffmeister, D.; Cao, Q.; Huang, S.; Lenz-Wiedemann, V.; Miao, Y.; Bareth, G. Multitemporal crop surface models: Accurate plant height measurement and biomass estimation with terrestrial laser scanning in paddy rice. J. Appl. Remote Sens. 2014, 8, 083671. [Google Scholar] [CrossRef]
- Du, M.; Noguchi, N. Monitoring of Wheat Growth Status and Mapping of Wheat Yield’s within-Field Spatial Variations Using Color Images Acquired from UAV-camera System. Remote Sens. 2017, 9, 289. [Google Scholar] [CrossRef] [Green Version]
- Li, W.; Niu, Z.; Chen, H.; Li, D.; Wu, M.; Zhao, W. Remote estimation of canopy height and aboveground biomass of maize using high-resolution stereo images from a low-cost unmanned aerial vehicle system. Ecol. Indic. 2016, 67, 637–648. [Google Scholar] [CrossRef]
- Bendig, J.; Bolten, A.; Bennertz, S.; Broscheit, J.; Eichfuss, S.; Bareth, G. Estimating Biomass of Barley Using Crop Surface Models (CSMs) Derived from UAV-Based RGB Imaging. Remote Sens. 2014, 6, 10395–10412. [Google Scholar] [CrossRef] [Green Version]
- Díaz-Varela, R.A.; De la Rosa, R.; León, L.; Zarco-Tejada, P.J. High-Resolution Airborne UAV Imagery to Assess Olive Tree Crown Parameters Using 3D Photo Reconstruction: Application in Breeding Trials. Remote Sens. 2015, 7, 4213–4232. [Google Scholar] [CrossRef] [Green Version]
- Marques, P.; Pádua, L.; Adão, T.; Hruška, J.; Peres, E.; Sousa, A.; Sousa, J.J. UAV-Based Automatic Detection and Monitoring of Chestnut Trees. Remote Sens. 2019, 11, 855. [Google Scholar] [CrossRef] [Green Version]
- Johansen, K.; Raharjo, T.; McCabe, M.F. Using Multi-Spectral UAV Imagery to Extract Tree Crop Structural Properties and Assess Pruning Effects. Remote Sens. 2018, 10, 854. [Google Scholar] [CrossRef] [Green Version]
- Pádua, L.; Marques, P.; Hruška, J.; Adão, T.; Peres, E.; Morais, R.; Sousa, J.J. Multi-Temporal Vineyard Monitoring through UAV-Based RGB Imagery. Remote Sens. 2018, 10, 1907. [Google Scholar] [CrossRef] [Green Version]
- de Castro, A.I.; Jiménez-Brenes, F.M.; Torres-Sánchez, J.; Peña, J.M.; Borra-Serrano, I.; López-Granados, F. 3-D Characterization of Vineyards Using a Novel UAV Imagery-Based OBIA Procedure for Precision Viticulture Applications. Remote Sens. 2018, 10, 584. [Google Scholar] [CrossRef] [Green Version]
- Matese, A.; Di Gennaro, S.F.; Berton, A. Assessment of a canopy height model (CHM) in a vineyard using UAV-based multispectral imaging. Int. J. Remote Sens. 2017, 38, 2150–2160. [Google Scholar] [CrossRef]
- Pádua, L.; Marques, P.; Adão, T.; Guimarães, N.; Sousa, A.; Peres, E.; Sousa, J.J. Vineyard Variability Analysis through UAV-Based Vigour Maps to Assess Climate Change Impacts. Agronomy 2019, 9, 581. [Google Scholar] [CrossRef] [Green Version]
- Comba, L.; Gay, P.; Primicerio, J.; Ricauda Aimonino, D. Vineyard detection from unmanned aerial systems images. Comput. Electron. Agric. 2015, 114, 78–87. [Google Scholar] [CrossRef]
- Nolan, A.; Park, S.; Fuentes, S.; Ryu, D.; Chung, H. Automated detection and segmentation of vine rows using high resolution UAS imagery in a commercial vineyard. In Proceedings of the 21st International Congress on Modelling and Simulation, Gold Coast, Australia, 29 November–4 December 2015; Volume 29, pp. 1406–1412. [Google Scholar]
- Poblete-Echeverría, C.; Olmedo, G.F.; Ingram, B.; Bardeen, M. Detection and Segmentation of Vine Canopy in Ultra-High Spatial Resolution RGB Imagery Obtained from Unmanned Aerial Vehicle (UAV): A Case Study in a Commercial Vineyard. Remote Sens. 2017, 9, 268. [Google Scholar] [CrossRef] [Green Version]
- Weiss, M.; Baret, F. Using 3D Point Clouds Derived from UAV RGB Imagery to Describe Vineyard 3D Macro-Structure. Remote Sens. 2017, 9, 111. [Google Scholar] [CrossRef] [Green Version]
- Baofeng, S.; Jinru, X.; Chunyu, X.; Yulin, F.; Yuyang, S.; Fuentes, S. Digital surface model applied to unmanned aerial vehicle based photogrammetry to assess potential biotic or abiotic effects on grapevine canopies. Int. J. Agric. Biol. Eng. 2016, 9, 119. [Google Scholar]
- Burgos, S.; Mota, M.; Noll, D.; Cannelle, B. Use of very high-resolution airborne images to analyse 3D canopy architecture of a vineyard. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2015, 40, 399. [Google Scholar] [CrossRef] [Green Version]
- Kalisperakis, I.; Stentoumis, C.; Grammatikopoulos, L.; Karantzalos, K. Leaf area index estimation in vineyards from UAV hyperspectral data, 2D image mosaics and 3D canopy surface models. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2015, 40, 299. [Google Scholar] [CrossRef] [Green Version]
- Pádua, L.; Marques, P.; Hruška, J.; Adão, T.; Bessa, J.; Sousa, A.; Peres, E.; Morais, R.; Sousa, J.J. Vineyard properties extraction combining UAS-based RGB imagery with elevation data. Int. J. Remote Sens. 2018, 39, 5377–5401. [Google Scholar] [CrossRef]
- Comba, L.; Biglia, A.; Ricauda Aimonino, D.; Gay, P. Unsupervised detection of vineyards by 3D point-cloud UAV photogrammetry for precision agriculture. Comput. Electron. Agric. 2018, 155, 84–95. [Google Scholar] [CrossRef]
- Pádua, L.; Marques, P.; Adáo, T.; Hruška, J.; Peres, E.; Morais, R.; Sousa, A.; Sousa, J.J. UAS-based Imagery and Photogrammetric Processing for Tree Height and Crown Diameter Extraction. In Proceedings of the International Conference on Geoinformatics and Data Analysis, ACM, New York, NY, USA, 20–22 April 2018; pp. 87–91. [Google Scholar]
- Dempewolf, J.; Nagol, J.; Hein, S.; Thiel, C.; Zimmermann, R. Measurement of Within-Season Tree Height Growth in a Mixed Forest Stand Using UAV Imagery. Forests 2017, 8, 231. [Google Scholar] [CrossRef] [Green Version]
- Surový, P.; Ribeiro, N.A.; Panagiotidis, D. Estimation of positions and heights from UAV-sensed imagery in tree plantations in agrosilvopastoral systems. Int. J. Remote Sens. 2018, 39, 4786–4800. [Google Scholar] [CrossRef]
- Primicerio, J.; Caruso, G.; Comba, L.; Crisci, A.; Gay, P.; Guidoni, S.; Genesio, L.; Aimonino, D.R.; Vaccari, F.P. Individual plant definition and missing plant characterization in vineyards from high-resolution UAV imagery. Eur. J. Remote Sens. 2017, 50, 179–186. [Google Scholar] [CrossRef]
- Matese, A.; Di Gennaro, S. Practical Applications of a Multisensor UAV Platform Based on Multispectral, Thermal and RGB High Resolution Images in Precision Viticulture. Agriculture 2018, 8, 116. [Google Scholar] [CrossRef] [Green Version]
- Costa, R.; Fraga, H.; Malheiro, A.C.; Santos, J.A. Application of crop modelling to portuguese viticulture: Implementation and added-values for strategic planning. Ciência Téc. Vitiv. 2015, 30, 29–42. [Google Scholar] [CrossRef] [Green Version]
- Maria do Carmo Val Technical Note 5-“Grapevine Powdery Mildew”. In ADVID Technical Notes; ADVID—Associação para o Desenvolvimento da Viticultura Duriense: Vila Real, Portugal, 2013; ISBN 978-989-98368-1-5.
- Hartmann, W.; Tilch, S.; Eisenbeiss, H.; Schindler, K. Determination of the UAV position by automatic processing of thermal images. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2012, 39, B6. [Google Scholar] [CrossRef] [Green Version]
- Richardson, A.D.; Jenkins, J.P.; Braswell, B.H.; Hollinger, D.Y.; Ollinger, S.V.; Smith, M.-L. Use of digital webcam images to track spring green-up in a deciduous broadleaf forest. Oecologia 2007, 152, 323–334. [Google Scholar] [CrossRef] [PubMed]
- Otsu, N. A Threshold Selection Method from Gray-Level Histograms. IEEE Trans. Syst. ManCybern. 1979, 9, 62–66. [Google Scholar] [CrossRef] [Green Version]
- Turner, D.; Lucieer, A.; Watson, C. Development of an Unmanned Aerial Vehicle (UAV) for hyper resolution vineyard mapping based on visible, multispectral, and thermal imagery. In Proceedings of the 34th International Symposium on Remote Sensing of Environment, Sydney, Australia, 10–15 April 2011. [Google Scholar]
- Turner, D.; Lucieer, A.; Malenovský, Z.; King, D.H.; Robinson, S.A. Spatial Co-Registration of Ultra-High Resolution Visible, Multispectral and Thermal Images Acquired with a Micro-UAV over Antarctic Moss Beds. Remote Sens. 2014, 6, 4003–4024. [Google Scholar] [CrossRef] [Green Version]
- Junges, A.H.; Fontana, D.C.; Lampugnani, C.S.; Junges, A.H.; Fontana, D.C.; Lampugnani, C.S. Relationship between the normalized difference vegetation index and leaf area in vineyards. Bragantia 2019, 78, 297–305. [Google Scholar] [CrossRef]
- Junges, A.H.; Fontana, D.C.; Anzanello, R.; Bremm, C. Normalized difference vegetation index obtained by ground-based remote sensing to characterize vine cycle in Rio Grande do Sul, Brazil. Ciência E Agrotecnologia 2017, 41, 543–553. [Google Scholar] [CrossRef] [Green Version]
- Yunusa, I.A.M.; Walker, R.R.; Lu, P. Evapotranspiration components from energy balance, sapflow and microlysimetry techniques for an irrigated vineyard in inland Australia. Agric. For. Meteorol. 2004, 127, 93–107. [Google Scholar] [CrossRef]
- Tucci, G.; Parisi, E.I.; Castelli, G.; Errico, A.; Corongiu, M.; Sona, G.; Viviani, E.; Bresci, E.; Preti, F. Multi-Sensor UAV Application for Thermal Analysis on a Dry-Stone Terraced Vineyard in Rural Tuscany Landscape. Isprs Int. J. Geo-Inf. 2019, 8, 87. [Google Scholar] [CrossRef] [Green Version]
- Jones, H.G. Use of infrared thermometry for estimation of stomatal conductance as a possible aid to irrigation scheduling. Agric. For. Meteorol. 1999, 95, 139–149. [Google Scholar] [CrossRef]
- Primicerio, J.; Gay, P.; Ricauda Aimonino, D.; Comba, L.; Matese, A.; di Gennaro, S.F. NDVI-based vigour maps production using automatic detection of vine rows in ultra-high resolution aerial images. In Precision Agriculture ’15; Wageningen Academic Publishers: Wageningen, The Netherlands, 2015; pp. 465–470. ISBN 978-90-8686-267-2. [Google Scholar]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Vineyard plot | Coordinates (Lat., Lon.) | Area (ha) | Number of Grapevines | Rows | |||
|---|---|---|---|---|---|---|---|
| Original | Missing | Number | Spacing (m) | Height (m) | |||
| A | 41°17′12.1″ N 7°44′15.2″ W | 0.36 | 1440 | 381 | 34 | 1.20 | 1.4–1.7 |
| B | 41°39′24.2″ N 8°22′24.5″ W | 0.19 | 234 | 0 | 7 | 2.00 | 2.8 |
| C | 41°17′08.6″ N 7°44′13.6″ W | 0.35 | 1439 | 448 | 36 | 1.20 | 1.4–1.7 |
| D | 41°17′13.2″ N 7°44′08.7″ W | 0.30 | 1228 | 320 | 22 | 1.20 | 1.4–1.7 |
| E | 41°17′08.1″ N 7°44′09.9″ W | 0.57 | 2266 | 416 | 55 | 1.25 | 1.4 |
| F | 41°17′09.5″ N 7°44′09.1″ W | 0.32 | 1224 | 405 | 45 | 1.25 | 1.4 |
| Parameter | Equation |
|---|---|
| Precision | |
| Recall | |
| False Negative Rate | |
| F1score | |
| Overall accuracy |
| Vineyard Plot | Number of Grapevines | Percentage (%) | |
|---|---|---|---|
| Observed | Estimated | ||
| A | 1436 | 1436 | 100.00 |
| B | 234 | 234 | 100.00 |
| C | 1369 | 1367 | 99.85 |
| D | 1238 | 1238 | 100.00 |
| E | 2279 | 2272 | 99.69 |
| F | 1230 | 1230 | 100.00 |
| Total | 7786 | 7777 | 99.88 |
| Vineyard plot | Precision (%) | Recall (%) | F1score (%) | FNR (%) | OA (%) |
|---|---|---|---|---|---|
| A | 99.22 | 98.71 | 98.96 | 1.29 | 98.33 |
| B | 100.00 | 100.00 | 100.00 | 0.00 | 100.00 |
| C | 100.00 | 93.98 | 96.90 | 6.02 | 95.17 |
| D | 99.90 | 96.62 | 98.23 | 3.38 | 97.09 |
| E | 99.71 | 97.67 | 98.68 | 2.33 | 97.58 |
| F | 99.00 | 97.07 | 98.03 | 2.93 | 96.75 |
| Mean | 99.64 | 97.34 | 98.47 | 2.66 | 97.49 |
| Vineyard Plot | Sensor | F# | Mean (cm) | RMSE (cm) | Projection Error (Pixel) |
|---|---|---|---|---|---|
| A | RGB | F1 | −0.19 | 3.15 | 1.30 |
| F2 | −0.19 | 4.55 | 1.21 | ||
| F3 | 0.08 | 3.65 | 0.57 | ||
| F4 | 0.06 | 3.09 | 0.58 | ||
| MSP | F1 | 0.78 | 5.47 | 0.71 | |
| F2 | −0.40 | 5.90 | 0.43 | ||
| F3 | 0.41 | 8.22 | 1.25 | ||
| F4 | 0.24 | 9.82 | 0.51 | ||
| TIR | F1 | 0.72 | 12.39 | 0.65 | |
| F2 | −0.98 | 13.34 | 0.54 | ||
| F3 | 3.82 | 19.38 | 0.74 | ||
| F4 | 4.70 | 16.87 | 0.90 | ||
| B | RGB | F1 | −0.37 | 3.68 | 1.30 |
| F2 | 0.02 | 2.20 | 0.63 | ||
| F3 | 0.00 | 1.73 | 0.57 | ||
| F4 | −0.03 | 1.81 | 0.57 | ||
| F5 | −0.01 | 1.76 | 0.58 | ||
| MSP | F1 | −0.63 | 4.66 | 0.50 | |
| F2 | 0.24 | 4.38 | 0.85 | ||
| F3 | −1.16 | 3.84 | 0.93 | ||
| F4 | −0.76 | 4.99 | 0.53 | ||
| F5 | 0.11 | 6.35 | 0.75 | ||
| TIR | F1 | 2.84 | 11.30 | 0.47 | |
| F2 | 3.14 | 16.52 | 0.76 | ||
| F3 | 2.35 | 15.55 | 0.66 | ||
| F4 | 2.60 | 14.02 | 0.59 | ||
| F5 | 1.55 | 14.30 | 0.77 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pádua, L.; Adão, T.; Sousa, A.; Peres, E.; Sousa, J.J. Individual Grapevine Analysis in a Multi-Temporal Context Using UAV-Based Multi-Sensor Imagery. Remote Sens. 2020, 12, 139. https://doi.org/10.3390/rs12010139
Pádua L, Adão T, Sousa A, Peres E, Sousa JJ. Individual Grapevine Analysis in a Multi-Temporal Context Using UAV-Based Multi-Sensor Imagery. Remote Sensing. 2020; 12(1):139. https://doi.org/10.3390/rs12010139
Chicago/Turabian StylePádua, Luís, Telmo Adão, António Sousa, Emanuel Peres, and Joaquim J. Sousa. 2020. "Individual Grapevine Analysis in a Multi-Temporal Context Using UAV-Based Multi-Sensor Imagery" Remote Sensing 12, no. 1: 139. https://doi.org/10.3390/rs12010139