Geo-Object-Based Land Cover Map Update for High-Spatial-Resolution Remote Sensing Images via Change Detection and Label Transfer

 ,
,  , and
, and
Abstract
:1. Introduction
2. Materials and Methods
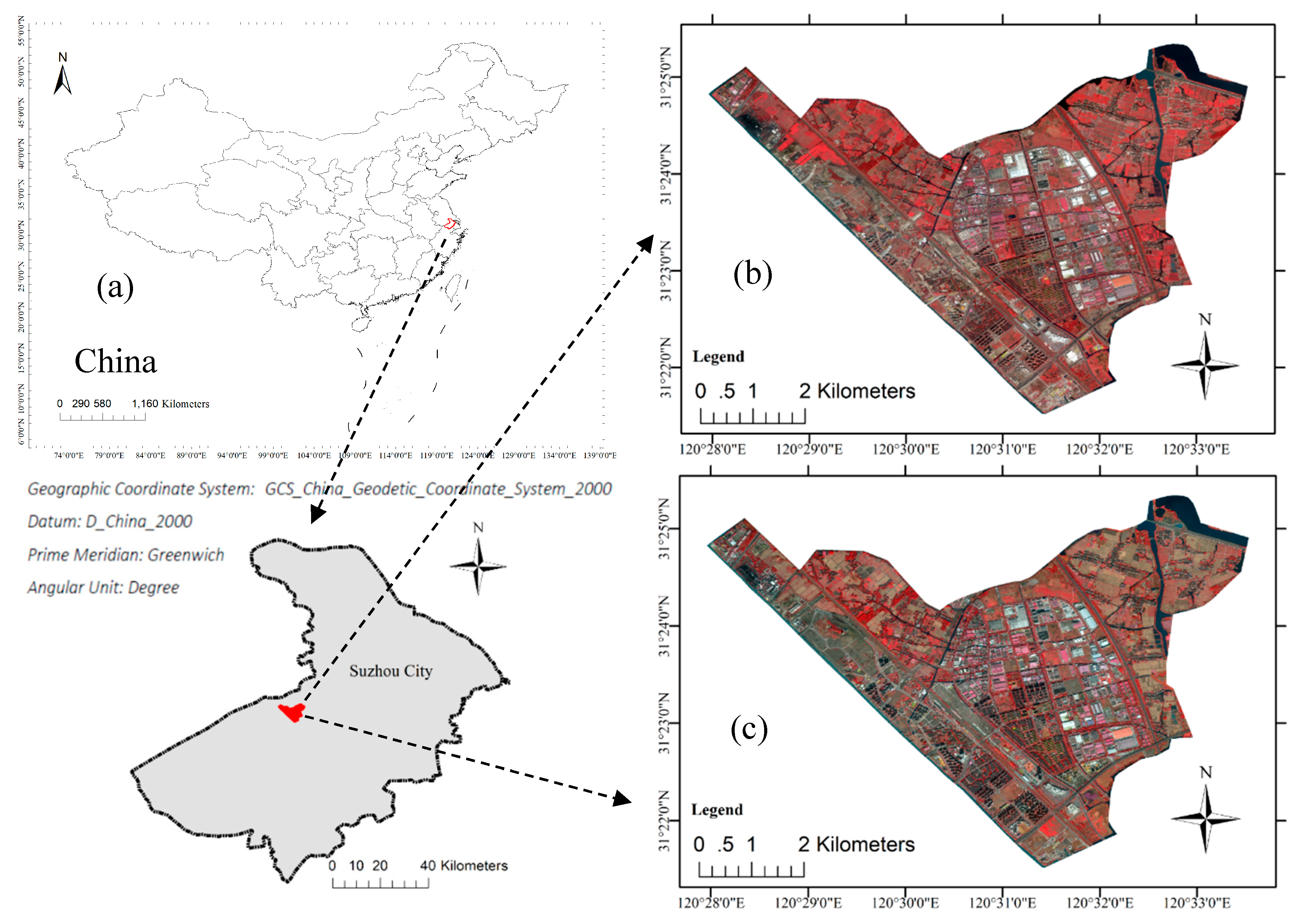
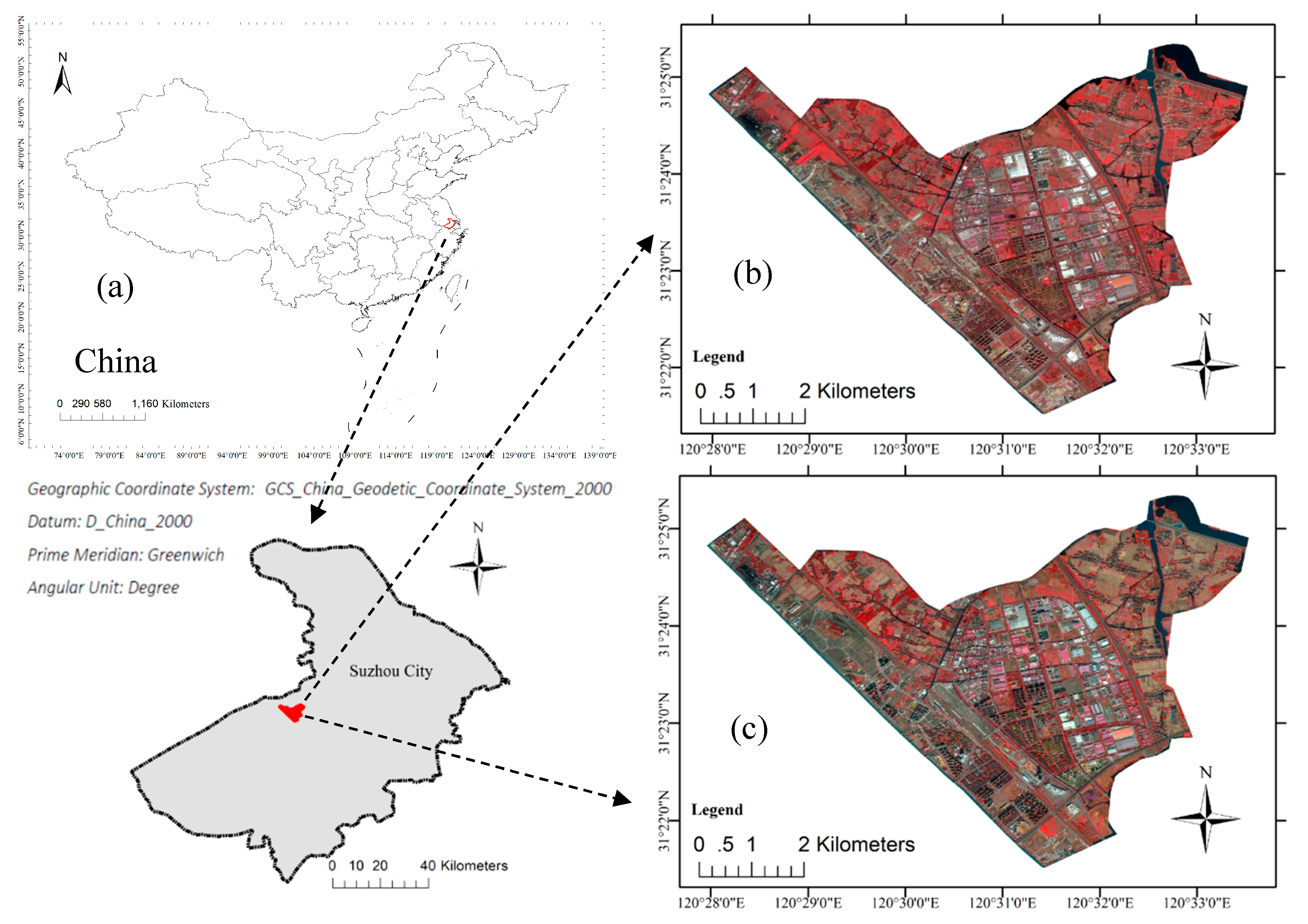
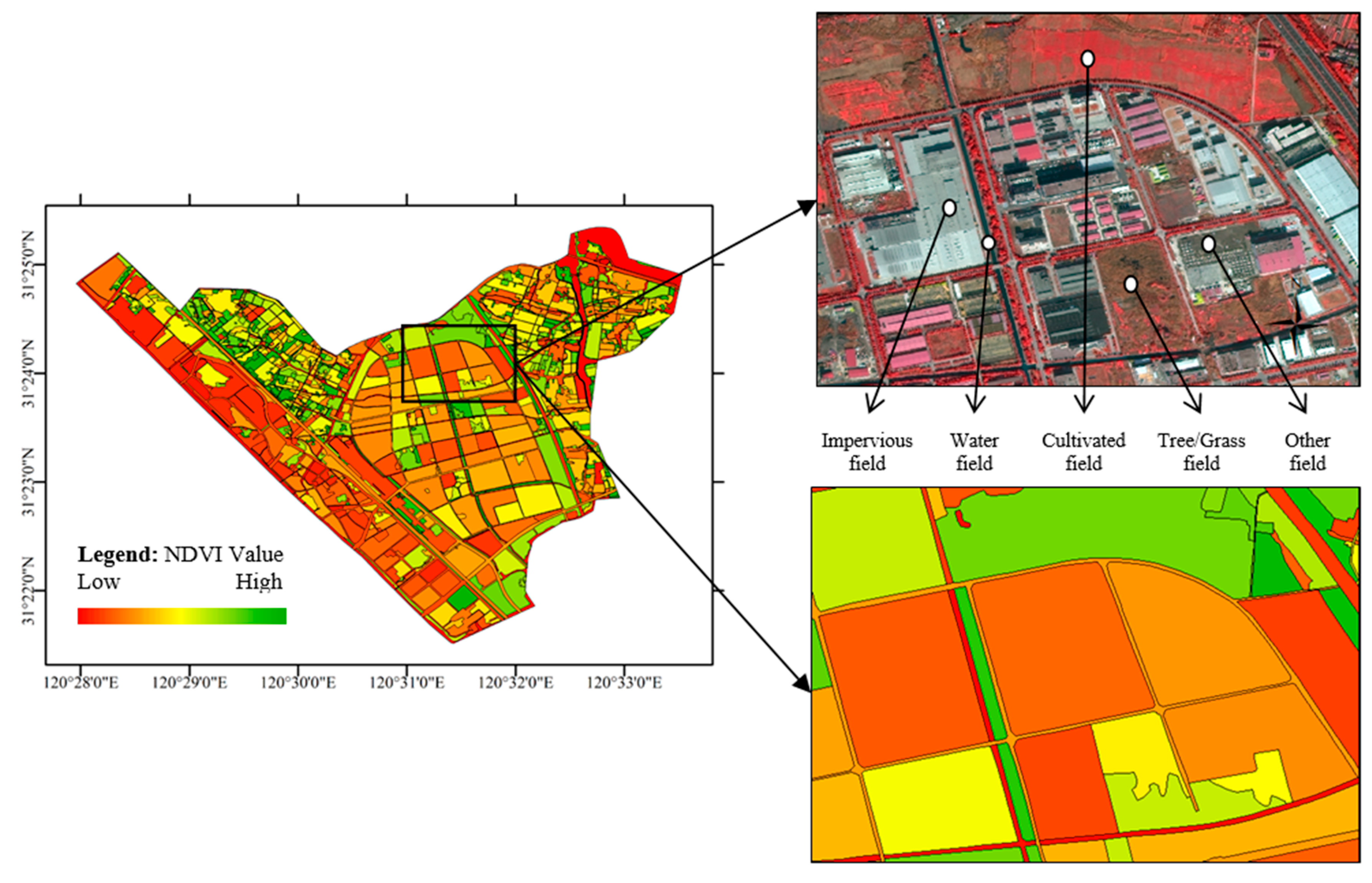
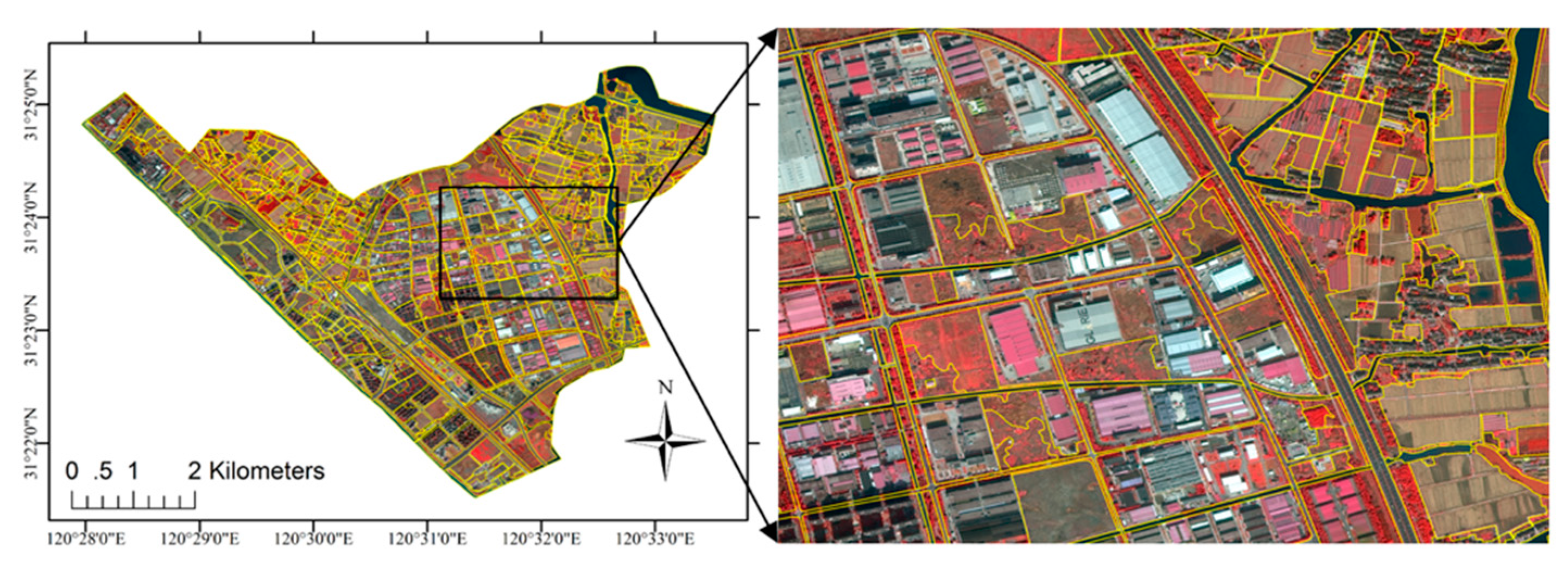
2.1. Data Set
2.1.1. Remote Sensing Images
2.1.2. Ancillary Data
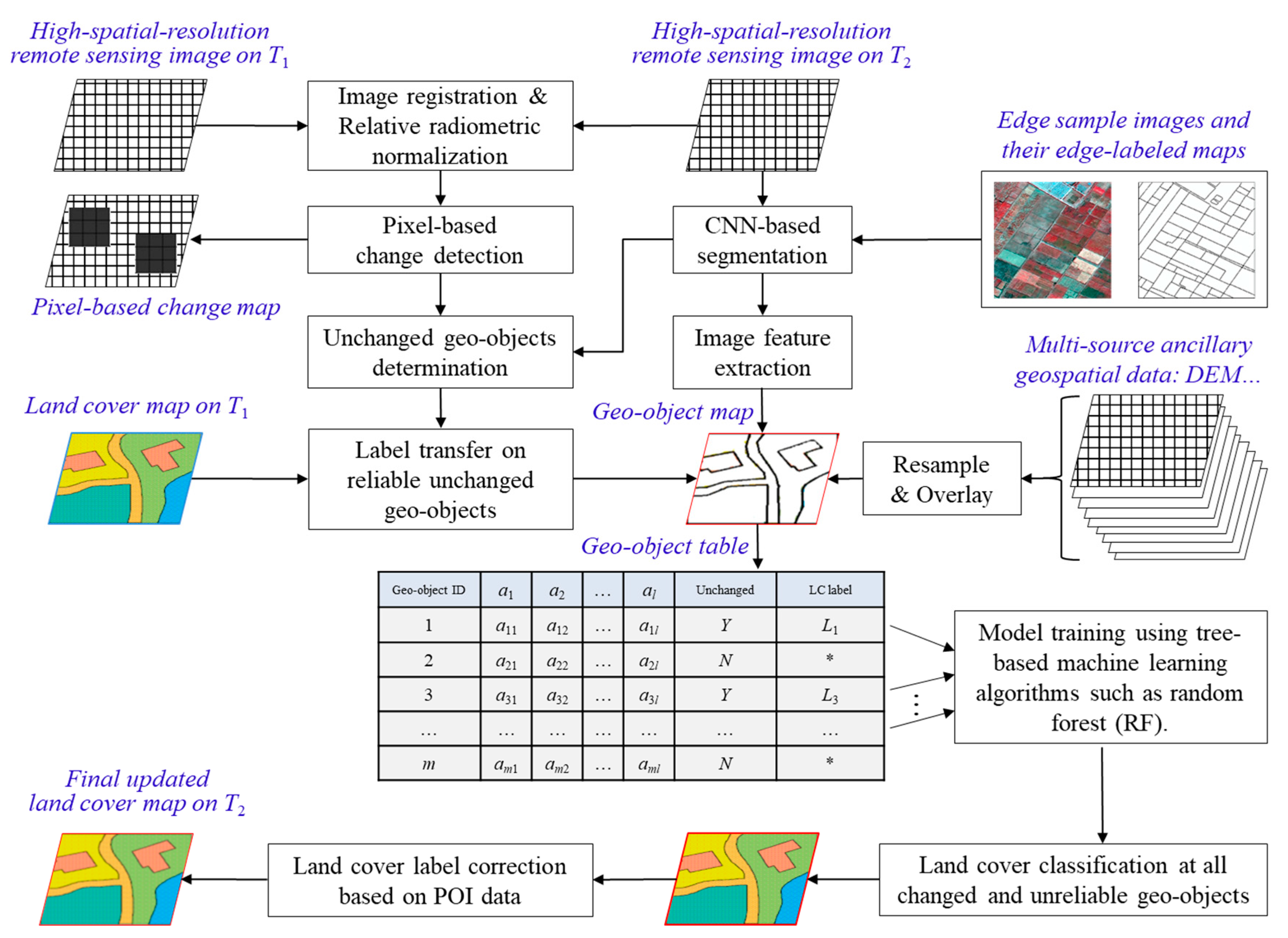
2.2. Methodology
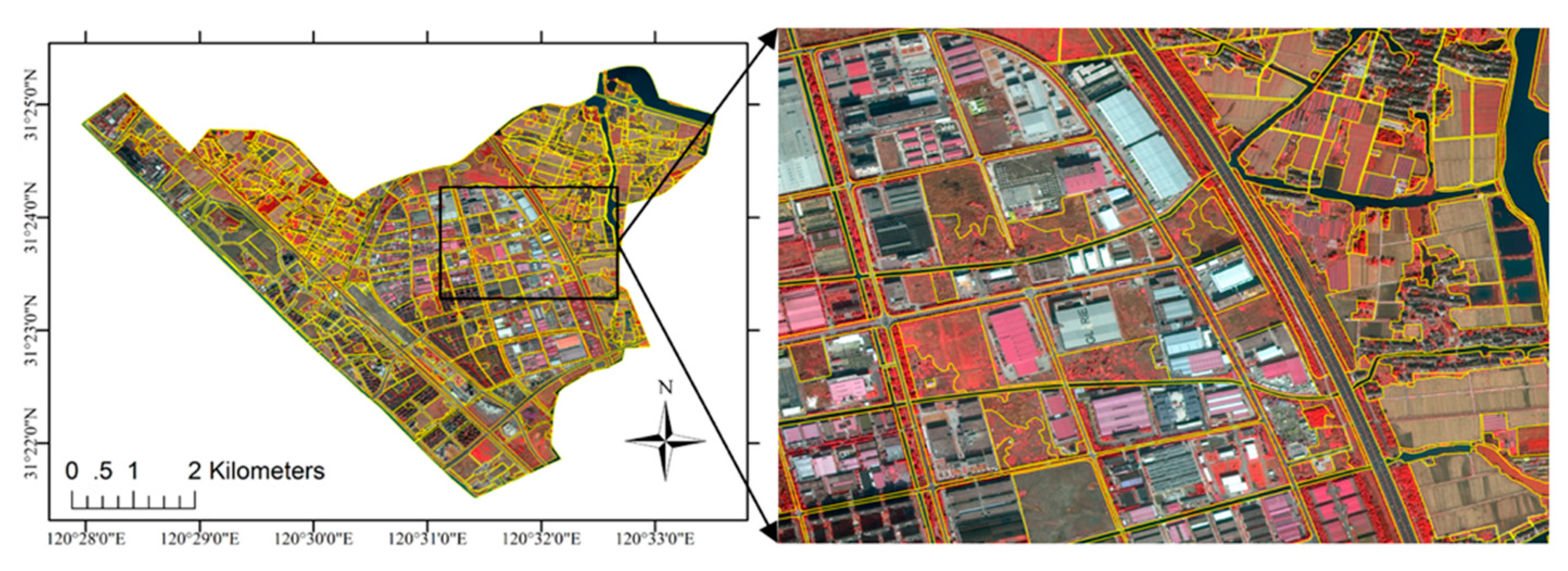
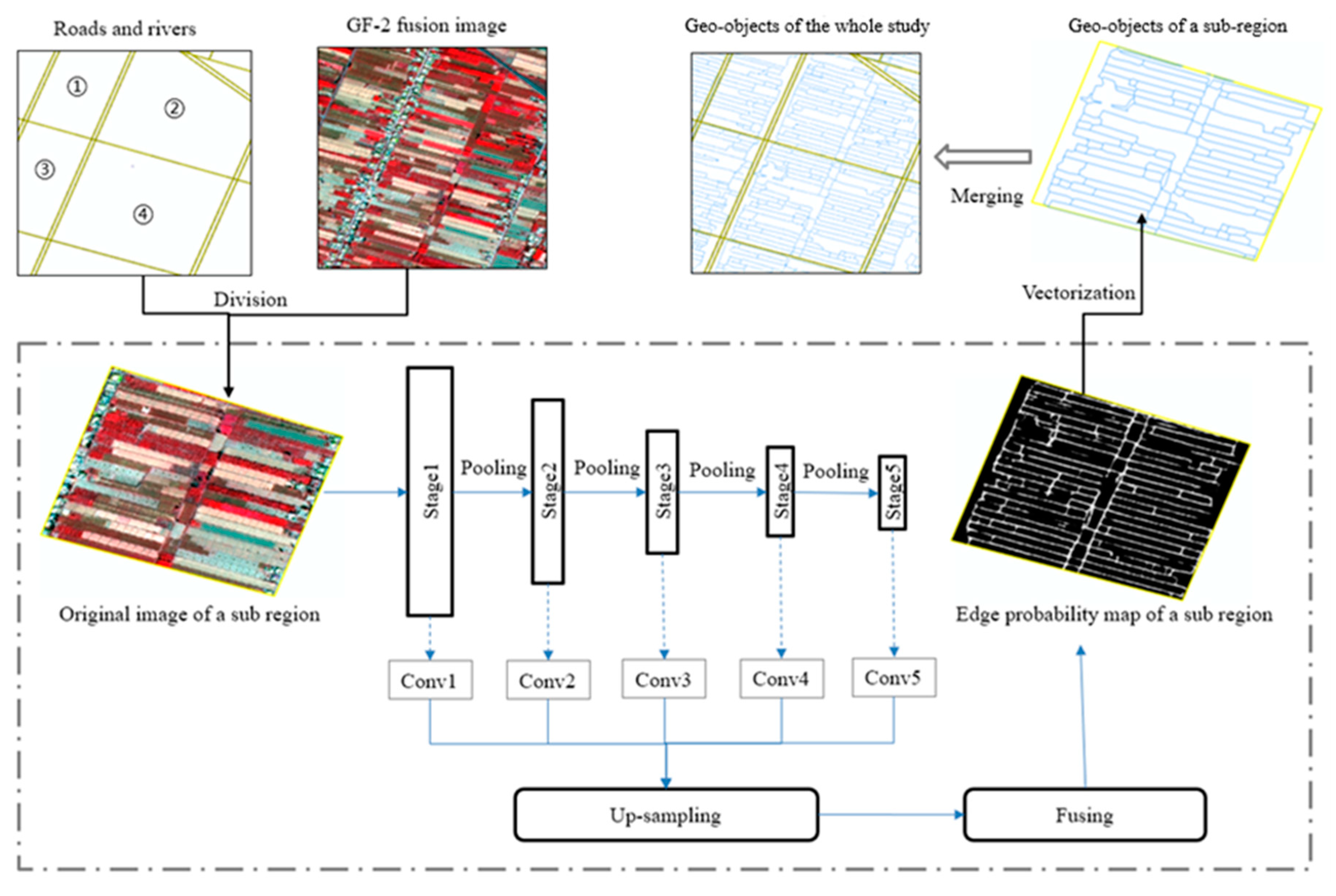
2.2.1. Geo-Object Extraction
2.2.2. Feature Extraction
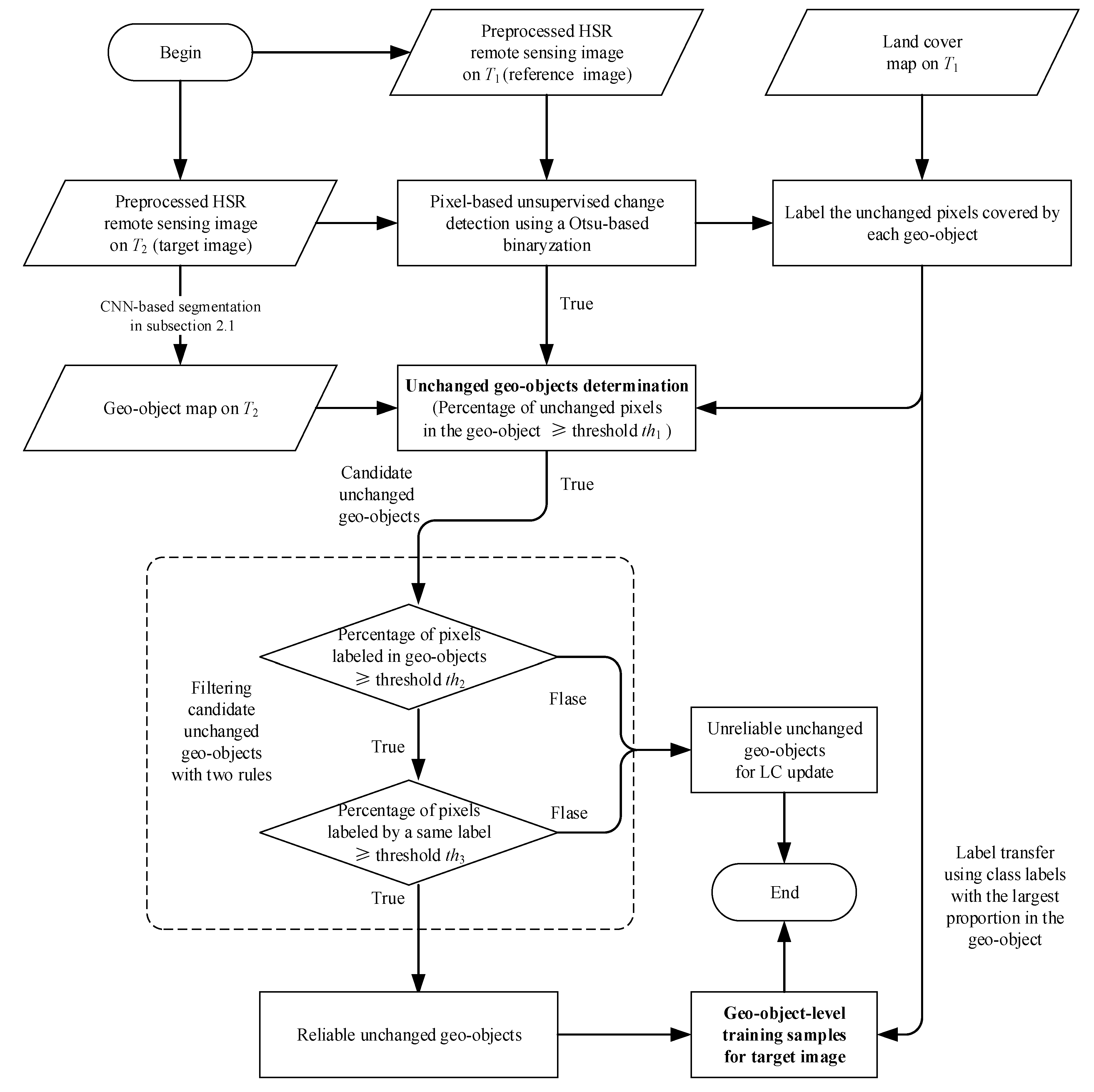
2.2.3. Automatic Scheme of Sample Collection using Change Detection and Label Transfer
2.2.4. Geo-Object-Based Supervised Classification
3. Results Analysis and Discussions
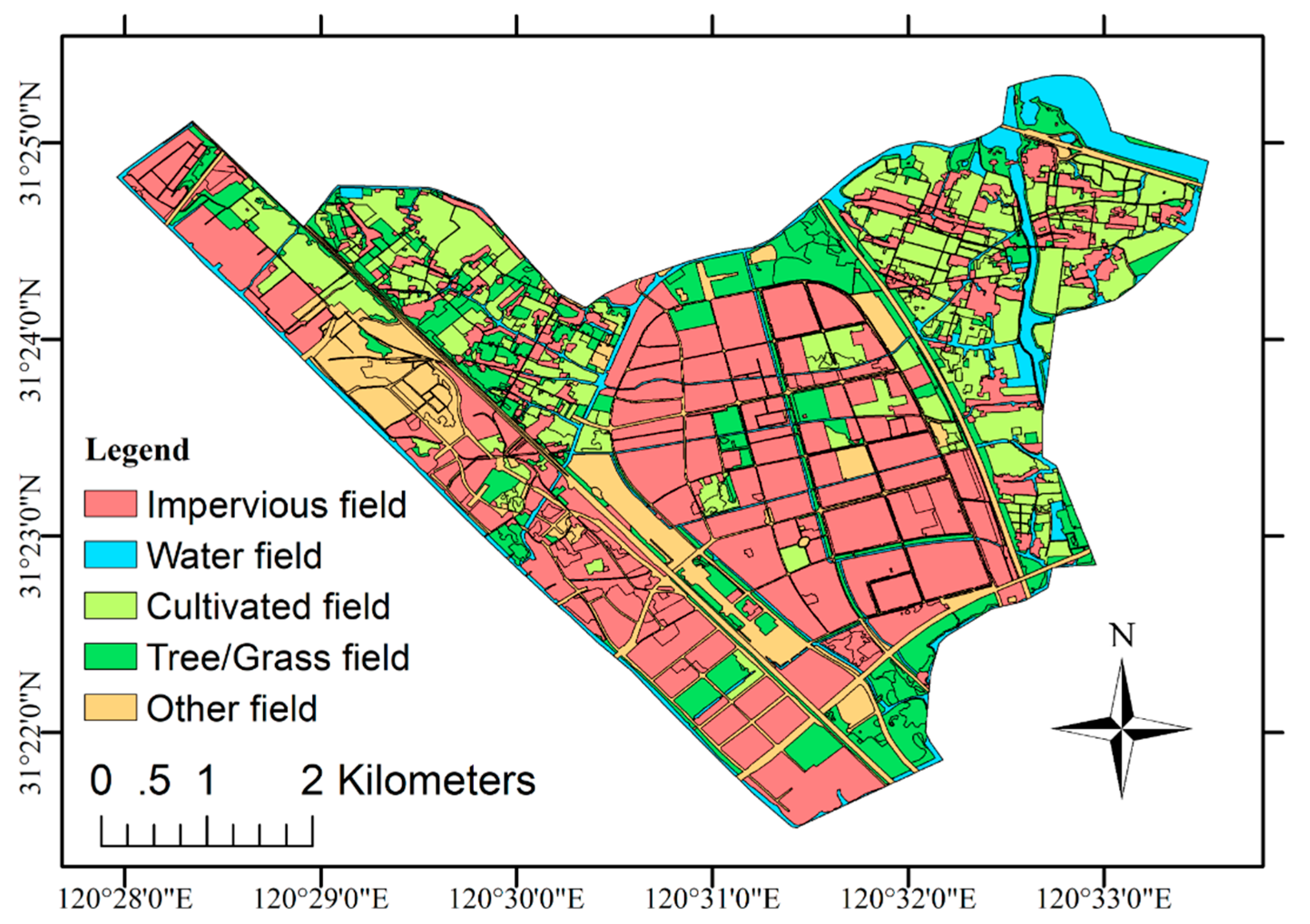
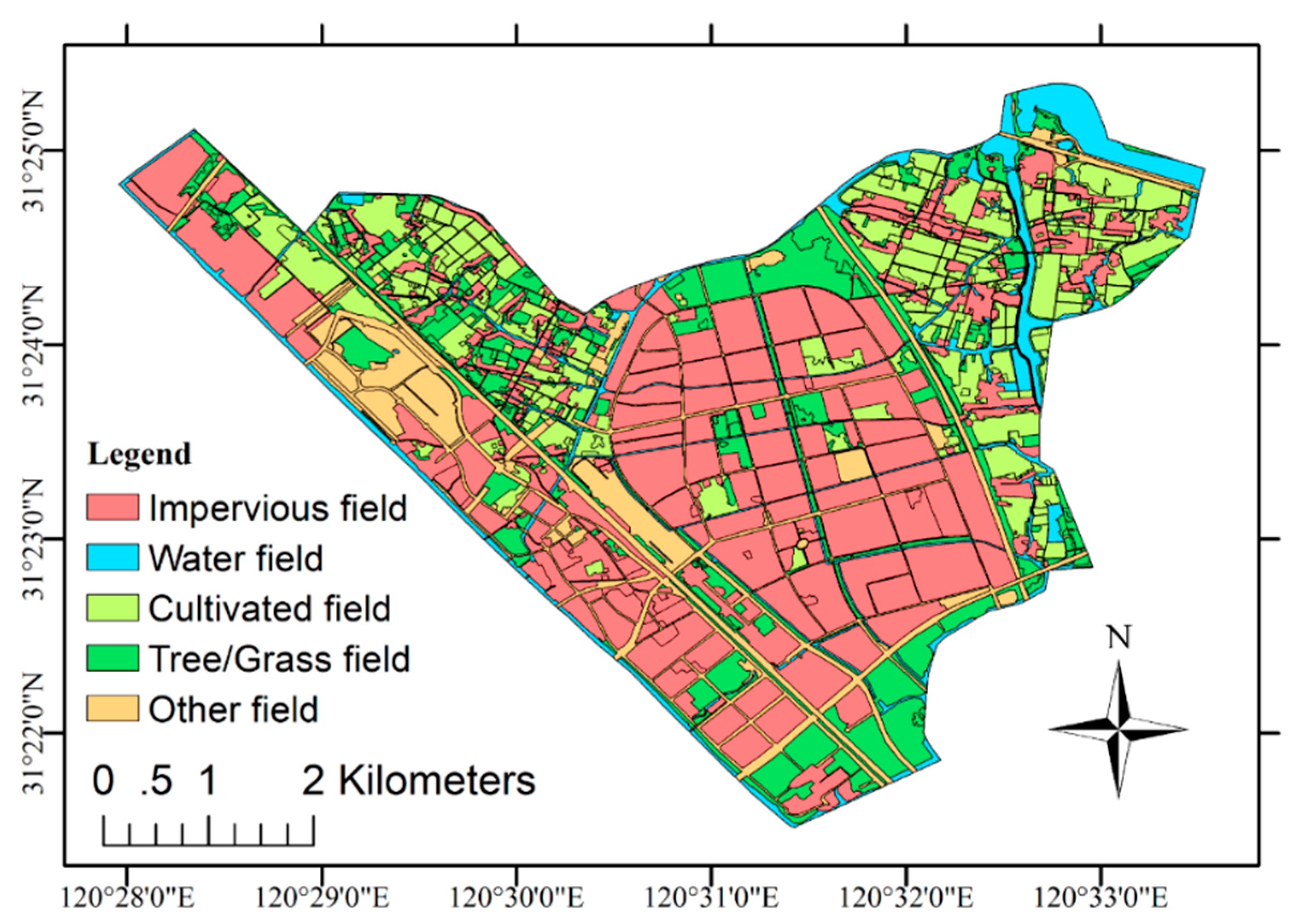
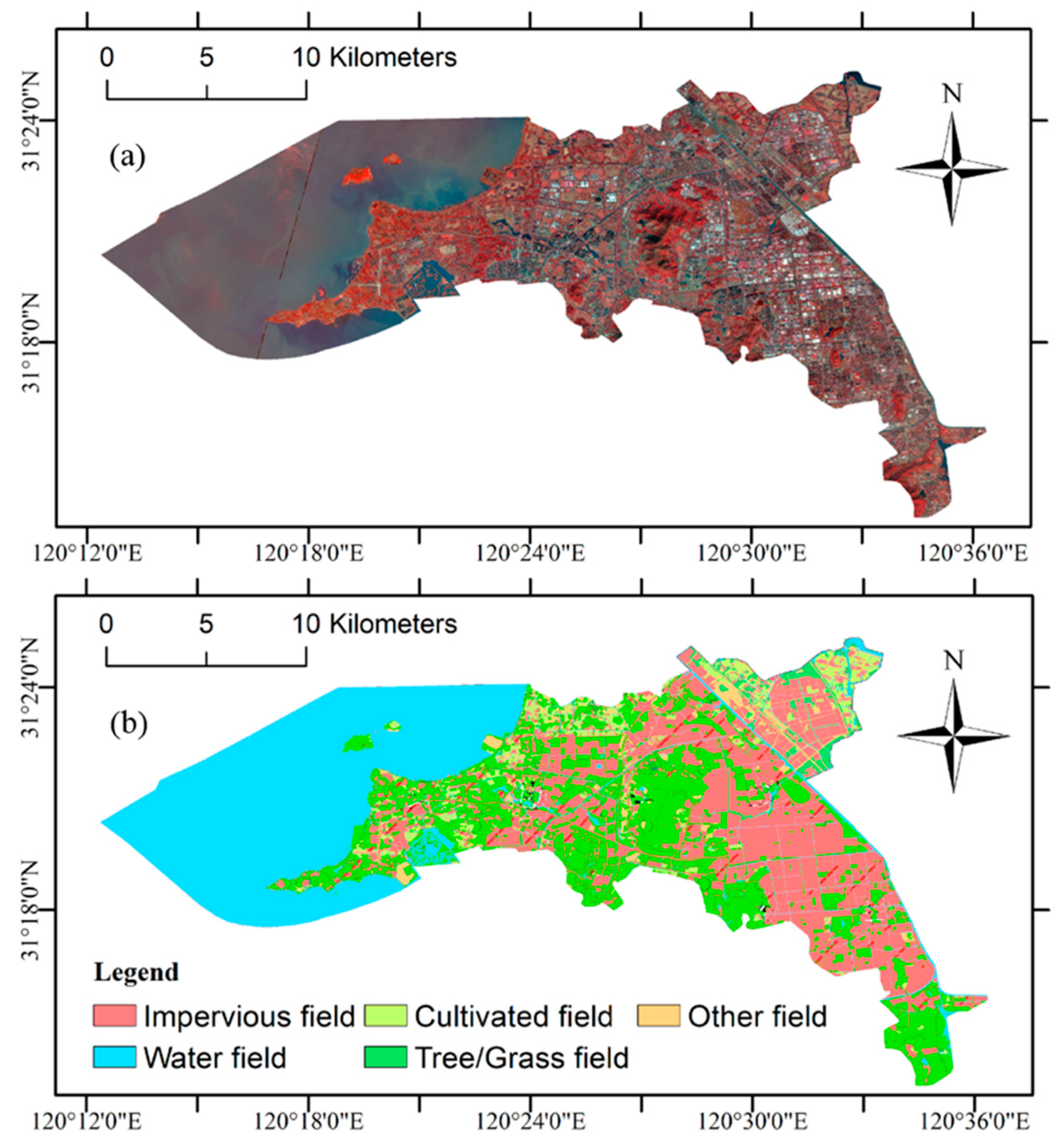
3.1. Experimental Results
3.2. Discussions
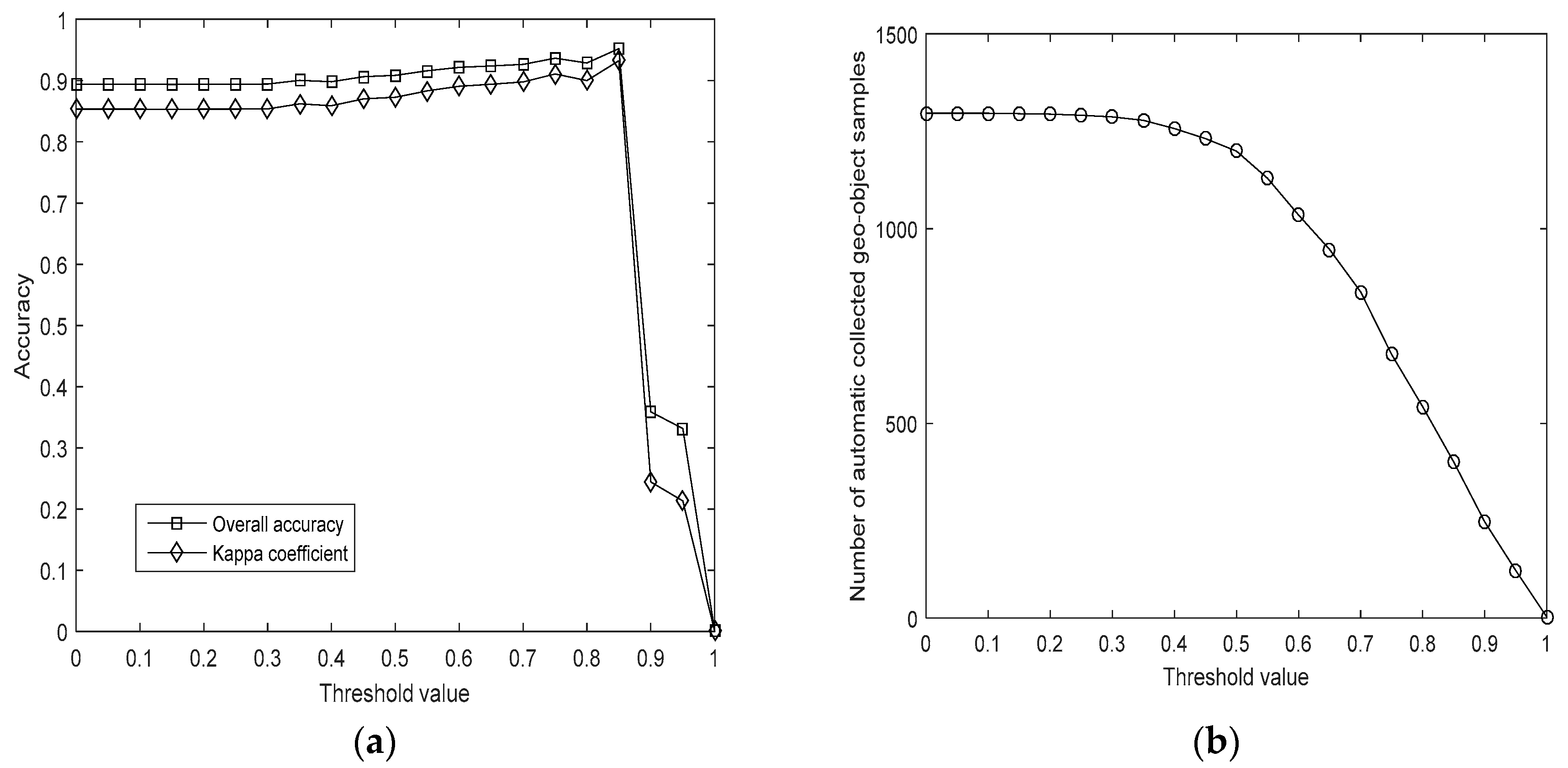
3.2.1. Impact of the Threshold Setup
3.2.2. Analysis of Sample Separability
3.2.3. Comparison with the Pixel-based Method and Manual-based Method
3.2.4. Misclassification and Future Works
4. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Agaton, M.; Setiawan, Y.; Effendi, H. Land use/land cover change detection in an urban watershed: A case study of upper Citarum Watershed West Java Province, Indonesia. Procedia Environ. Sci. 2016, 33, 654–660. [Google Scholar] [CrossRef] [Green Version]
- Wulder, M.A.; Coops, N.C. Satellites: Make earth observations open access. Nature 2014, 513, 30–31. [Google Scholar] [CrossRef] [PubMed]
- Jun, C.; Ban, Y.F.; Li, S.N. China: Open access to earth land-cover map. Nature 2014, 514, 434. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Chen, J.; Chen, J.; Liao, A.P.; Cao, X.; Chen, L.J.; Chen, X.H.; He, C.Y.; Han, G.; Peng, S.; Lu, M.; et al. Global land cover mapping at 30 m resolution: A POK-based operational approach. ISPRS J. Photogramm. Remote Sens. 2015, 103, 7–27. [Google Scholar] [CrossRef] [Green Version]
- Zhu, Z.; Woodcock, C.E.; Olofsson, P. Continuous monitoring of forest disturbance using all available Landsat imagery. Remote Sens. Environ. 2012, 122, 75–91. [Google Scholar] [CrossRef]
- Zurqani, H.A.; Post, C.J.; Mikhailova, E.A.; Allen, J.S. Mapping urbanization trends in a forested landscape using Google Earth Engine. Remote Sens. Earth Syst. Sci. 2019, 2, 173–182. [Google Scholar] [CrossRef]
- Zurqani, H.A.; Post, C.J.; Mikhailova, E.A.; Schlautman, M.A.; Sharp, J.L. Geospatial analysis of land use change in the Savannah River Basin using Google Earth Engine. Int. J. Appl. Earth Obs. Geoinf. 2018, 69, 175–185. [Google Scholar] [CrossRef]
- Karpatne, A.; Jiang, Z.; Vatsavai, R.R.; Shekhar, S.; Kumar, V. Monitoring land-cover changes: A machine-learning perspective. IEEE Geosci. Remote Sens. Mag. 2016, 4, 8–21. [Google Scholar] [CrossRef]
- Scepan, J.; Menz, G.; Hansen, M.C. The DISCover validation image interpretation process. Photogramm. Eng. Remote Sens. 1999, 65, 1075–1081. [Google Scholar]
- Szantoi, Z.; Escobedo, F.J.; Abd-Elrahman, A.; Pearlstine, L.; Dewitt, B.; Smith, S. Classifying spatially heterogeneous wetland communities using machine learning algorithms and spectral and textural features. Environ. Monit. Assess. 2015, 187, 262. [Google Scholar] [CrossRef]
- Xian, G.; Homer, C. Updating the 2001 national land cover database impervious surface products to 2006 using Landsat imagery change detection methods. Remote Sens. Environ. 2010, 114, 1676–1686. [Google Scholar] [CrossRef]
- Chen, X.H.; Chen, J.; Shi, Y.S.; Yamaguchia, Y. An automated approach for updating land cover maps based on integrated change detection and classification methods. ISPRS J. Photogramm. Remote Sens. 2012, 71, 86–95. [Google Scholar] [CrossRef]
- Zhang, Y.S.; Zheng, X.W.; Liu, G.; Sun, X.; Wang, H.Q.; Fu, K. Semi-supervised manifold learning based multi-graph fusion for high-resolution remote sensing image classification. IEEE Geosci. Remote Sens. Lett. 2014, 11, 464–468. [Google Scholar] [CrossRef]
- Friedl, M.A.; Sulla-Menashe, D.; Tan, B.; Schneider, A.; Ramankutty, N.; Sibley, A.; Huang, X.M. MODIS Collection 5 global land cover: Algorithm refinements and characterization of new datasets. Remote Sens. Environ. 2010, 114, 168–182. [Google Scholar] [CrossRef]
- Zhao, Y.Y.; Gong, P.; Yu, L.; Hu, L.Y.; Li, X.Y.; Li, C.C.; Zhang, H.Y.; Zheng, Y.M.; Wang, J.; Zhao, Y.C.; et al. Towards a common validation sample set for global land cover mapping. Int. J. Remote Sens. 2014, 35, 4795–4814. [Google Scholar] [CrossRef]
- Bruzzone, L.; Marconcini, M. Toward the automatic updating of land-cover maps by a domain-adaptation SVM classifier and a circular validation strategy. IEEE Trans. Geosci. Remote Sens. 2009, 47, 1108–1122. [Google Scholar] [CrossRef]
- Wu, T.J.; Luo, J.C.; Xia, L.G.; Shen, Z.F.; Hu, X.D. Prior knowledge-based automatic object-oriented hierarchical classification for updating detailed land cover maps. J. Indian Soc. Remote Sens. 2015, 43, 653–669. [Google Scholar] [CrossRef]
- Dan, Z.P.; Sang, N.; Chen, Y.F.; Chen, X. Remote sensing object recognition based on transfer learning. In Proceedings of the 10th IEEE International Conference on Fuzzy Systems and Knowledge Discovery, Shenyang, China, 23–25 July 2013; Volume 1, pp. 930–934. [Google Scholar]
- Pan, S.J.; Yang, Q. A survey on transfer learning. IEEE Trans. Knowl. Data Eng. 2010, 22, 1345–1359. [Google Scholar] [CrossRef]
- Pan, S.J.; Tsang, I.W.; Kwok, J.T.; Yang, Q. Domain adaptation via transfer component analysis. IEEE Trans. Neural Netw. 2011, 22, 199–210. [Google Scholar] [CrossRef] [Green Version]
- Daum, H.; Marcu, D. Domain adaptation for statistical classifiers. J. Artif. Intell. Res. 2011, 26, 101–126. [Google Scholar] [CrossRef]
- Rajan, S.; Ghosh, J.; Crawford, M.M. Exploiting class hierarchies for knowledge transfer in hyperspectral data. IEEE Trans. Geosci. Remote Sens. 2006, 44, 3408–3417. [Google Scholar] [CrossRef]
- Durbha, S.S.; King, R.L.; Andugula, P.; Younan, N.H. Transfer learning for image information mining applications. Int. J. Image Data Fusion 2012, 3, 203–219. [Google Scholar] [CrossRef]
- Persello, C.; Bruzzone, L. Active learning for domain adaptation in the supervised classification of remote sensing images. IEEE Trans. Geosci. Remote Sens. 2012, 50, 4468–4483. [Google Scholar] [CrossRef]
- Demir, B.; Bovolo, F.; Bruzzone, L. Updating land-cover maps by classification of image time series: A novel change-detection-driven transfer learning approach. IEEE Trans. Geosci. Remote Sens. 2013, 51, 300–312. [Google Scholar] [CrossRef]
- Gray, J.; Song, C.H. Consistent classification of image time series with automatic adaptive signature generalization. Remote Sens. Environ. 2013, 134, 333–341. [Google Scholar] [CrossRef]
- Tuia, D.; Munoz-Mari, J.; Gomez-Chova, G.; Malo, J. Graph matching for adaptation in remote sensing. IEEE Trans. Geosci. Remote Sens. 2013, 51, 329–341. [Google Scholar] [CrossRef] [Green Version]
- Demir, B.; Minello, L.; Bruzzone, L. Definition of effective training sets for supervised classification of remote sensing images by a novel cost-sensitive active learning method. IEEE Trans. Geosci. Remote Sens. 2014, 52, 1272–1284. [Google Scholar] [CrossRef]
- Liu, Y.L.; Li, X. Domain adaptation for land use classification: A spatio-temporal knowledge reusing method. ISPRS J. Photogramm. Remote Sens. 2014, 98, 133–144. [Google Scholar] [CrossRef]
- Sun, H.; Liu, S.; Zhou, S.L.; Zou, H.X. Unsupervised cross-view semantic transfer for remote sensing image classification. IEEE Geosci. Remote Sens. Lett. 2016, 13, 13–17. [Google Scholar] [CrossRef]
- Zhou, Y.; Lian, J.; Han, M. Remote sensing image transfer classification based on weighted extreme learning machine. IEEE Geosci. Remote Sens. Lett. 2016, 13, 1405–1409. [Google Scholar] [CrossRef]
- Homer, C.; Huang, C.Q.; Yang, L.M.; Wylie, B.; Coan, M. Development of a 2001 national land-cover database for the United States. Photogramm Eng. Remote Sens. 2004, 70, 829–840. [Google Scholar] [CrossRef] [Green Version]
- Liu, J.Y.; Liu, M.L.; Tian, H.Q.; Zhuang, D.F.; Zhang, Z.X.; Zhang, W.; Tang, X.M.; Deng, X.Z. Spatial and temporal patterns of China’s cropland during 1990–2000: An analysis based on Landsat TM data. Remote Sens. Environ. 2005, 98, 442–456. [Google Scholar] [CrossRef]
- Lv, Z.Y.; Shi, W.Z.; Benediktsson, J.A.; Ning, X.J. Novel object-based filter for improving land-cover classification of aerial imagery with very high spatial resolution. Remote Sens. 2016, 8, 1023. [Google Scholar] [CrossRef] [Green Version]
- Lv, Z.Y.; Zhang, P.L.; Benediktsson, J.A. Automatic object-oriented, spectral-spatial feature extraction driven by Tobler’s first law of geography for very high resolution aerial imagery classification. Remote Sens. 2017, 9, 285. [Google Scholar] [CrossRef] [Green Version]
- Marmanis, D.; Schindler, K.; Wegner, J.D.; Galliani, S.; Datcu, M.; Stilla, U. Classification with an edge: Improving semantic image segmentation with boundary detection. ISPRS J. Photogramm. Remote Sens. 2018, 135, 158–172. [Google Scholar] [CrossRef] [Green Version]
- Dong, W.; Wu, T.J.; Luo, J.C.; Sun, Y.W.; Xia, L.G. Land-parcel-based Digital Soil Mapping of Soil Nutrient Properties in an Alluvial-diluvia Plain Agricultural Area in China. Geoderma 2019, 340, 234–248. [Google Scholar] [CrossRef]
- Simonyan, K.; Zisserman, A. Very deep convolutional networks for large-scale image recognition. In Proceedings of the 3rd International Conference on Learning Representations (ICLR 2015), San Diego, CA, USA, 7–9 May 2015; pp. 1–14. [Google Scholar]
- Liu, Y.; Cheng, M.M.; Hu, X.; Wang, K.; Bai, X. Richer convolutional features for edge detection. In Proceedings of the 30th IEEE Conference on Computer Vision and Pattern Recognition (CVPR 2017), Honolulu, HI, USA, 21–26 July 2017; pp. 5872–5881. [Google Scholar]
- Zhang, L.P.; Huang, X.; Huang, B. A pixel shape index coupled with spectral information for classification of high spatial resolution remotely sensed imagery. IEEE Trans. Geosci. Remote Sens. 2006, 44, 2950–2961. [Google Scholar] [CrossRef]
- Lu, D.; Weng, Q. A survey of image classification methods and techniques for improving classification performance. Int. J. Remote Sens. 2007, 28, 823–870. [Google Scholar] [CrossRef]
- Pesaresi, M.; Gerhardinger, A.; Kayitakire, F. A robust built-up area presence index by anisotropic rotation-invariant textural measure. IEEE J. Sel. Top. Appl. Earth Observ. Remote Sens. 2008, 1, 180–192. [Google Scholar] [CrossRef]
- Pesaresi, M.; Gerhardinger, A. Improved textural built-up presence index for automatic recognition of human settlements in arid regions with scattered vegetation. IEEE J. Sel. Top. Appl. Earth Observ. Remote Sens. 2011, 4, 16–26. [Google Scholar] [CrossRef]
- Marceau, D.J.; Howarth, P.J.; Dubois, J.M.; Gratton, D.J. Evaluation of the grey-level co-occurrence matrix method for land-cover classification using SPOT imagery. IEEE Trans. Geosci. Remote Sens. 1990, 28, 513–519. [Google Scholar] [CrossRef]
- Lu, D.; Mausel, P.; Brondizio, E.; Moran, E. Change detection techniques. Int. J. Remote Sens. 2004, 25, 2365–2407. [Google Scholar] [CrossRef]
- Lv, Z.Y.; Liu, T.F.; Shi, C.; Benediktsson, J.A.; Du, H.J. Novel land cover change detection method based on k-means clustering and adaptive majority voting using bi-temporal remote sensing images. IEEE Access 2019, 7, 34425–34437. [Google Scholar] [CrossRef]
- Lv, Z.Y.; Liu, T.F.; Zhang, P.L.; Benediktsson, J.A.; Chen, Y.X. Land cover change detection based on adaptive contextual information using bi-temporal remote sensing images. Remote Sens. 2018, 10, 901. [Google Scholar] [CrossRef] [Green Version]
- Breiman, L. Random forest. Mach. Learn. 2001, 45, 5–32. [Google Scholar] [CrossRef] [Green Version]
- Ghiyamat, A.; Shafri, H.Z.M.; Mahdiraji, G.A.; Shariff, A.R.M.; Mansor, S. Hyperspectral discrimination of tree species with different classifications using single- and multiple-endmember. Int. J. Appl. Earth Obs. Geoinf. 2013, 23, 177–191. [Google Scholar] [CrossRef]
- Padma, S.; Sanjeevi, S. Jeffries Matusita based mixed-measure for improved spectral matching in hyperspectral image analysis. Int. J. Appl. Earth Obs. Geoinf. 2014, 32, 138–151. [Google Scholar] [CrossRef]
- Bruzzone, L.; Roli, F.; Serpico, S.B. An extension of the Jeffreys-Matusita distance to multiclass cases for feature selection. IEEE Geosci. Remote Sens. 1995, 33, 1318–1321. [Google Scholar] [CrossRef] [Green Version]
- Shao, Y.; Lunetta, R.S.; Wheeler, B.; Iiames, J.S.; Campbell, J.B. An evaluation of time-series smoothing algorithms for land-cover classifications using MODIS-NDVI multi-temporal data. Remote Sens. Environ. 2016, 174, 258–265. [Google Scholar] [CrossRef]
- Blaschke, T. Object based image analysis for remote sensing. ISPRS J. Photogramm. Remote Sens. 2010, 65, 2–16. [Google Scholar] [CrossRef] [Green Version]
- Olofsson, P.; Foody, G.M.; Herold, M.; Stehman, S.V.; Woodcock, C.E.; Wulder, M.A. Good practices for estimating area and assessing accuracy of land change. Remote Sens. Environ. 2014, 148, 42–57. [Google Scholar] [CrossRef]
- Nasrallah, A.; Nicolas, B.; Mario, M.; Ghaleb, F.; Talal, D.; Hatem, B.; Salem, D. A novel approach for mapping wheat areas using high resolution Sentinel-2 images. Sensors 2018, 18, 2089. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Lv, Z.Y.; Liu, T.F.; Wan, Y.L.; Benediktsson, J.A.; Zhang, X.K. Post-processing approach for refining raw land cover change detection of very high-resolution remote sensing images. Remote Sens. 2018, 10, 472. [Google Scholar] [CrossRef] [Green Version]
- Comber, A.; Balzter, H.; Cole, B.; Fisher, P.; Johnson, S.; Ogutu, B. Methods to quantify regional differences in land cover change. Remote Sens. 2016, 8, 176. [Google Scholar] [CrossRef] [Green Version]
- Hussain, M.; Chen, D.M.; Cheng, A.; Wei, H.; Stanley, D. Change detection from remotely sensed images: From pixel-based to object-based approaches. ISPRS J. Photogramm. Remote Sens. 2013, 80, 91–106. [Google Scholar] [CrossRef]
- Hinton, G.; Osindero, S.; Teh, Y.-W. A fast learning algorithm for deep belief nets. Neural Comput. 2006, 18, 1527–1554. [Google Scholar] [CrossRef]
- Zhu, X.J. Semi-Supervised Learning Literature Survey; Computer Sciences Technical Report 1530; University of Wisconsin Madison: Madison, WI, USA, 2008. [Google Scholar]
- Burr, S. Active Learning Literature Survey; Computer Sciences Technical Report 1648; University of Wisconsin Madison: Madison, WI, USA, 2009. [Google Scholar]
- Liu, Q.S.; Metaxas, D.N. Unifying subspace and distance metric learning with bhattacharyya coefficient for image classification. In Proceedings of the Emerging Trends in Visual Computing (ETVC 2008), Palaiseau, France, 18–20 November 2008; pp. 254–267. [Google Scholar]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Band No. | Spectral Range (μm) | Spatial Resolution (m) | Swath Width (km) | Repetition Cycle (days) | |
|---|---|---|---|---|---|
| Panchromatic band | 0 | 0.45–0.90 | 1 | 45 (two cameras combined) | 5 |
| Multispectral bands | 1 | 0.45–0.52 | 4 | ||
| 2 | 0.52–0.59 | ||||
| 3 | 0.63–0.69 | ||||
| 4 | 0.77–0.89 | ||||
| Spectrum Features | Shape Features | Texture Features | Topographic Features |
|---|---|---|---|
| Mean of spectrum signals in band 1 | Length–width ratio | Homogeneity | Elevation |
| Mean of spectrum signals in band 2 | Length of geometry | Contrast | Slope |
| Mean of spectrum signals in band 3 | Width of geometry | Dissimilarity | Aspect |
| Mean of spectrum signals in band 4 | Compactness | Second moment | |
| Standard deviation of spectrum signals in band 1 | Main direction of geometry | Entropy | |
| Standard deviation of spectrum signals in band 2 | Number of points | Correlation | |
| Standard deviation of spectrum signals in band 3 | Length of border | ||
| Standard deviation of spectrum signals in band 4 | Shape index | ||
| Brightness of spectrum signals | Number of corner points | ||
| Maximum differences of spectrum signals | |||
| Normalized difference vegetation index (NDVI) | |||
| Normalized difference water index (NDWI) |
| LC Class | Number of Artificially Interpreted Points | Producer Accuracy (%) | ||||
|---|---|---|---|---|---|---|
| Impervious Field | Water Field | Cultivated Field | Tree/Grass Field | Other Field | ||
| Impervious field | 956 | 2 | 3 | 34 | 5 | 95.6 |
| Water field | 0 | 987 | 1 | 12 | 0 | 98.7 |
| Cultivated field | 4 | 1 | 894 | 40 | 61 | 89.4 |
| Tree/Grass field | 6 | 3 | 21 | 950 | 20 | 95.0 |
| Other field | 0 | 1 | 1 | 33 | 965 | 96.5 |
| User accuracy (%) | 99.0 | 99.3 | 97.2 | 88.9 | 91.8 | — |
| Overall measures | Overall accuracy (OA) (%): 95.22 | Kappa coefficient (KC): 0.9324 | ||||
| LC Class | Number of Artificially Interpreted Points | Number of Correctly Classified Points | Accuracy (%) | Main Misclassification |
|---|---|---|---|---|
| Impervious field | 1000 | 956 | 95.6 | Tree/Grass field |
| Water field | 1000 | 987 | 98.7 | Tree/Grass field |
| Cultivated field | 1000 | 894 | 89.4 | Tree/Grass field + Other field |
| Tree/Grass field | 1000 | 950 | 95.0 | Cultivated field + Other field |
| Other field | 1000 | 965 | 96.5 | Tree/Grass field |
| Total | 5000 | 4761 | 95.22 | — |
| LC Classes | Impervious Field | Water Field | Cultivated Field | Tree/Grass Field | Other Field |
|---|---|---|---|---|---|
| Impervious field | — | 1.9243 | 1.9021 | 1.8946 | 1.7592 |
| Water field | 1.9243 | — | 1.9234 | 1.9357 | 1.8979 |
| Cultivated field | 1.9021 | 1.9234 | — | 1.5233 | 1.6348 |
| Tree/Grass field | 1.8946 | 1.9357 | 1.5233 | — | 1.7324 |
| Other field | 1.7592 | 1.8979 | 1.6348 | 1.7324 | — |
| Mean Value | 1.8701 | 1.9203 | 1.7459 | 1.7715 | 1.7561 |
| Classification Method | OA (%) | KC |
|---|---|---|
| Geo-object-based method | 95.73 | 0.9421 |
| Pixel-based method | 92.71 | 0.9012 |
| Mapping Method | Accuracy from Number Statistics | Accuracy from Area Statistics | Interpretation Time |
|---|---|---|---|
| Our automatic method | 1223/1338 = 0.9141 | 34.2455/36.6436 = 0.9346 | 0.0014 h |
| Manual-based method | 1338/1338 = 1.0000 | 36.6436/ 36.6436 = 1.0000 | 1.8583 h |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wu, T.; Luo, J.; Zhou, Y.; Wang, C.; Xi, J.; Fang, J. Geo-Object-Based Land Cover Map Update for High-Spatial-Resolution Remote Sensing Images via Change Detection and Label Transfer. Remote Sens. 2020, 12, 174. https://doi.org/10.3390/rs12010174
Wu T, Luo J, Zhou Y, Wang C, Xi J, Fang J. Geo-Object-Based Land Cover Map Update for High-Spatial-Resolution Remote Sensing Images via Change Detection and Label Transfer. Remote Sensing. 2020; 12(1):174. https://doi.org/10.3390/rs12010174
Chicago/Turabian StyleWu, Tianjun, Jiancheng Luo, Ya’nan Zhou, Changpeng Wang, Jiangbo Xi, and Jianwu Fang. 2020. "Geo-Object-Based Land Cover Map Update for High-Spatial-Resolution Remote Sensing Images via Change Detection and Label Transfer" Remote Sensing 12, no. 1: 174. https://doi.org/10.3390/rs12010174
APA StyleWu, T., Luo, J., Zhou, Y., Wang, C., Xi, J., & Fang, J. (2020). Geo-Object-Based Land Cover Map Update for High-Spatial-Resolution Remote Sensing Images via Change Detection and Label Transfer. Remote Sensing, 12(1), 174. https://doi.org/10.3390/rs12010174