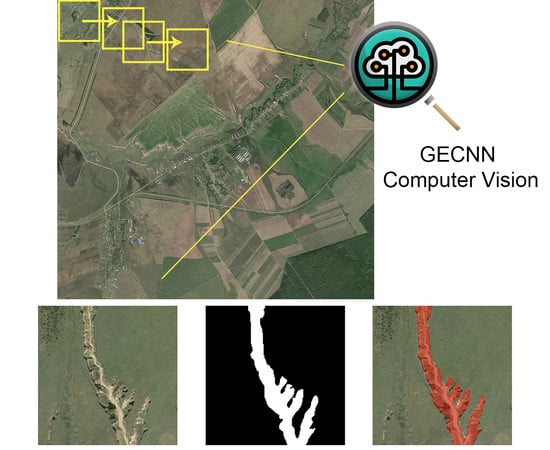
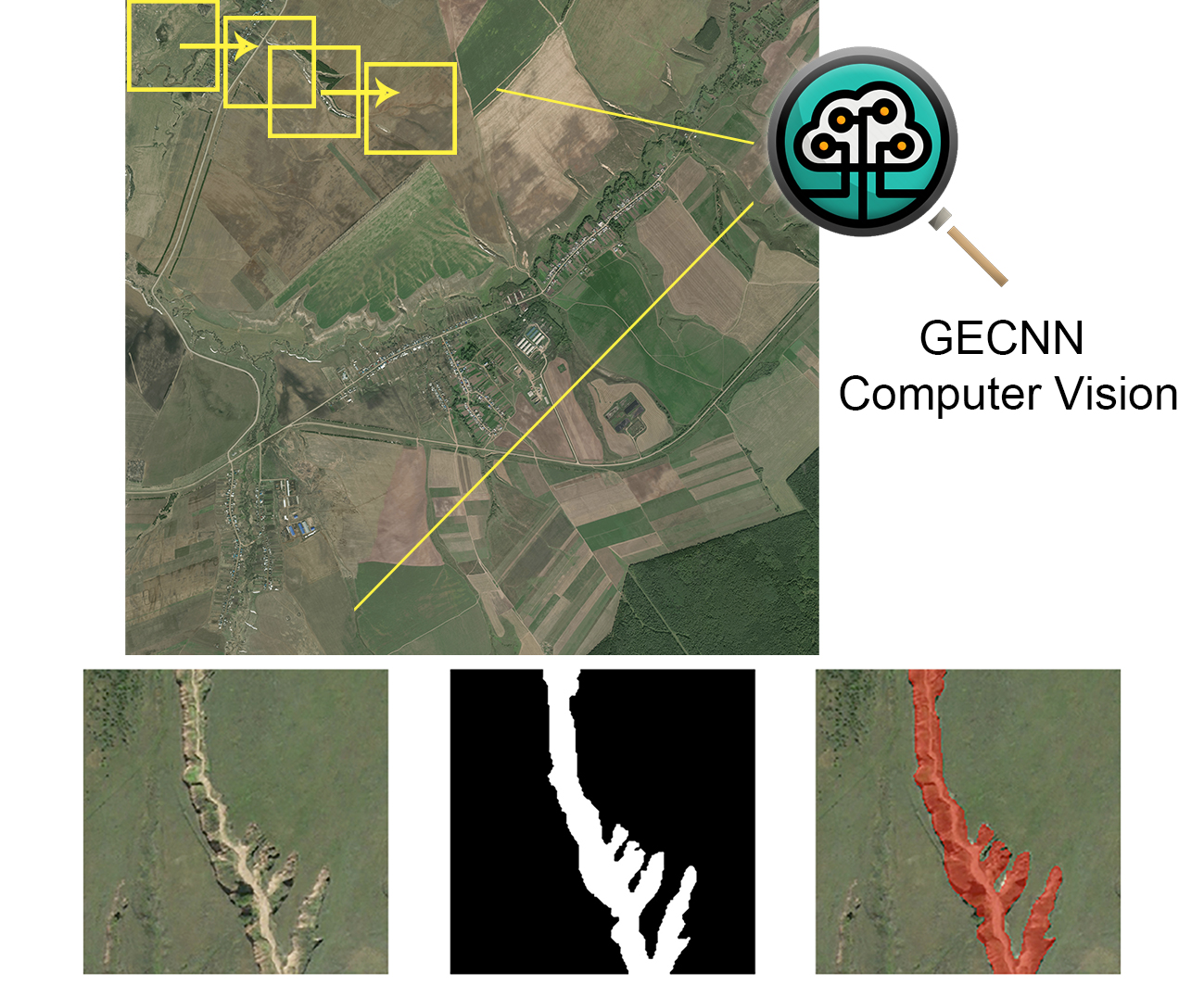
Automatic Gully Detection: Neural Networks and Computer Vision



Abstract
:
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
1. Introduction
- Manual (visual) identification of gullies by remote sensing, especially in a large area, is very laborious and requires field verification of the results;
- There is no unified methodological basis for gully detection by remote sensing data and few regional detection references;
- Subjectivity in gully detection taking into account gully development stages.
- Selection of the remote sensing data source;
- Selection of the software development environment;
- Neural network architecture development;
- Collecting a training dataset;
- Training of the neural network;
- Evaluation of the recognition accuracy of objects (gullies) using the developed method.
2. Materials and Methods
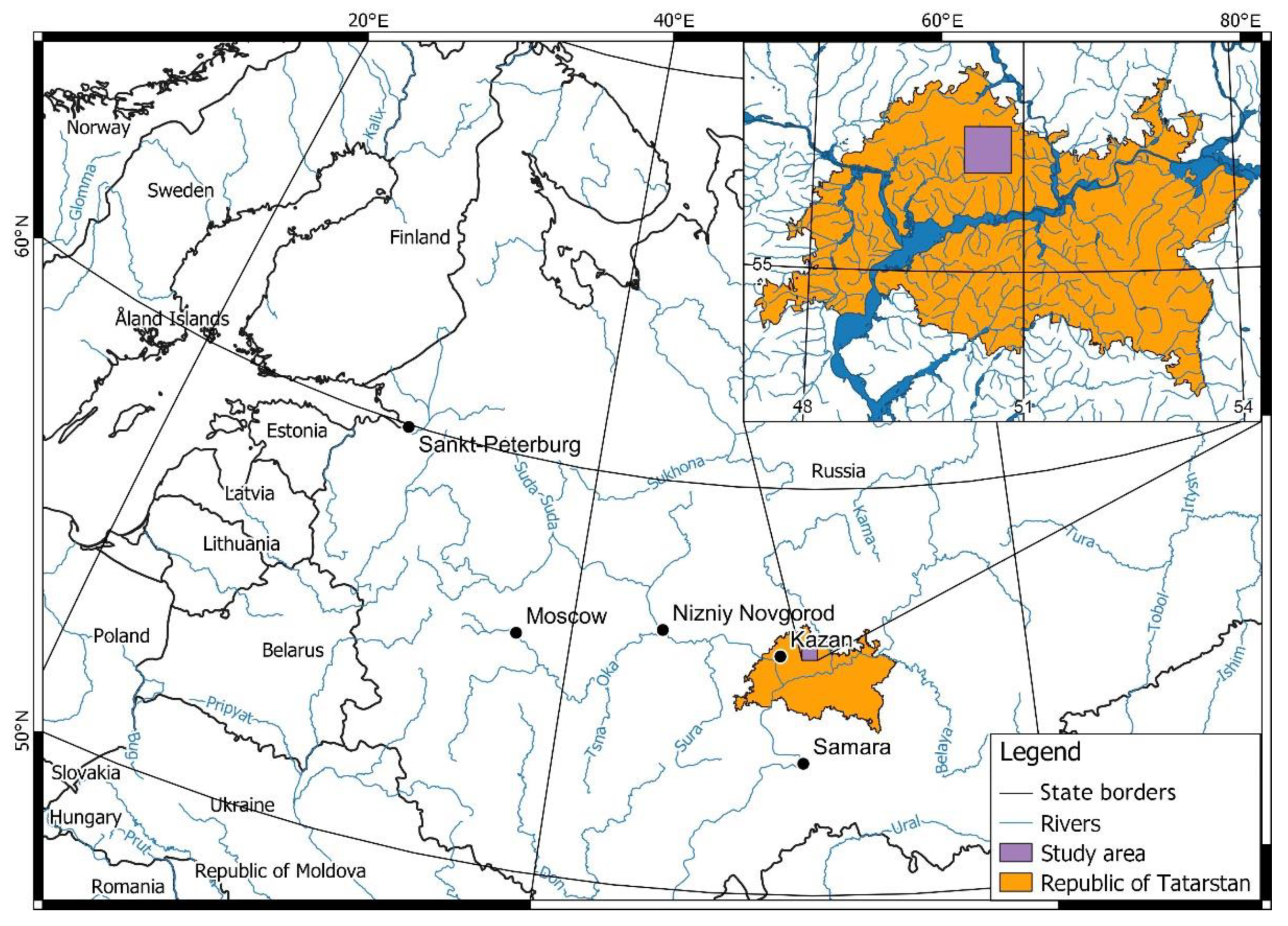
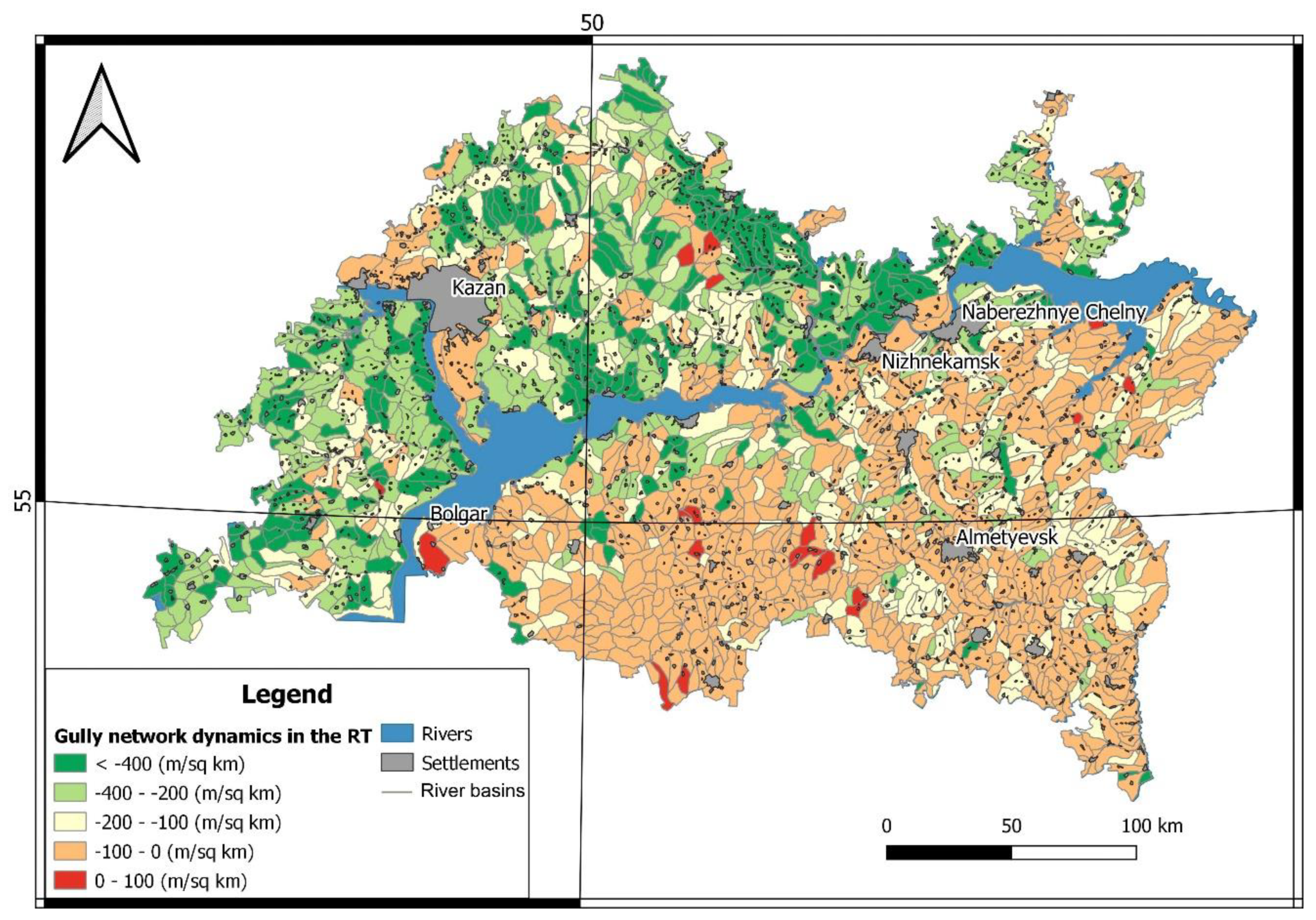
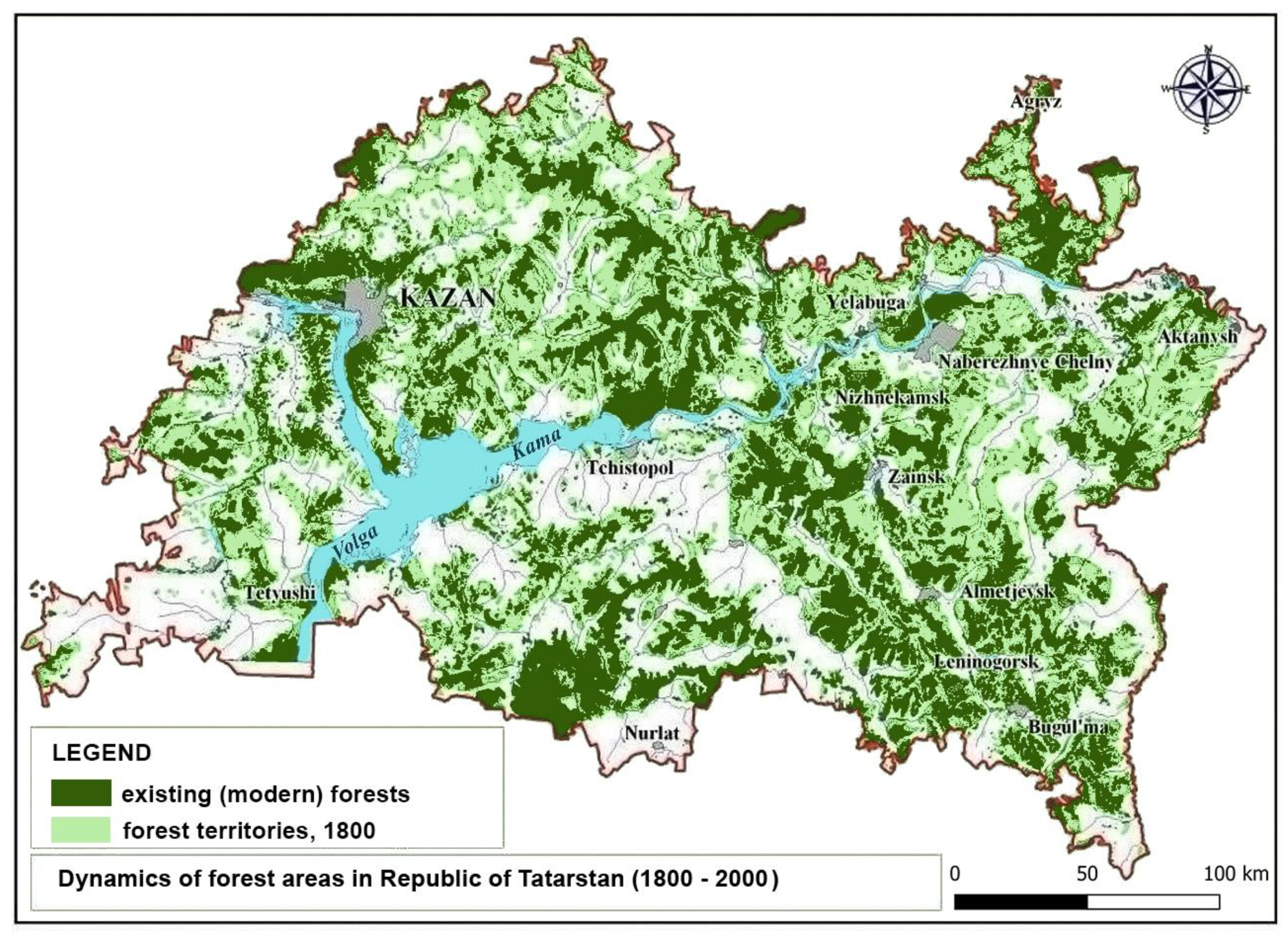
2.1. Case Study Area
2.2. Source Materials and Software
2.3. Preparation of a Training Data
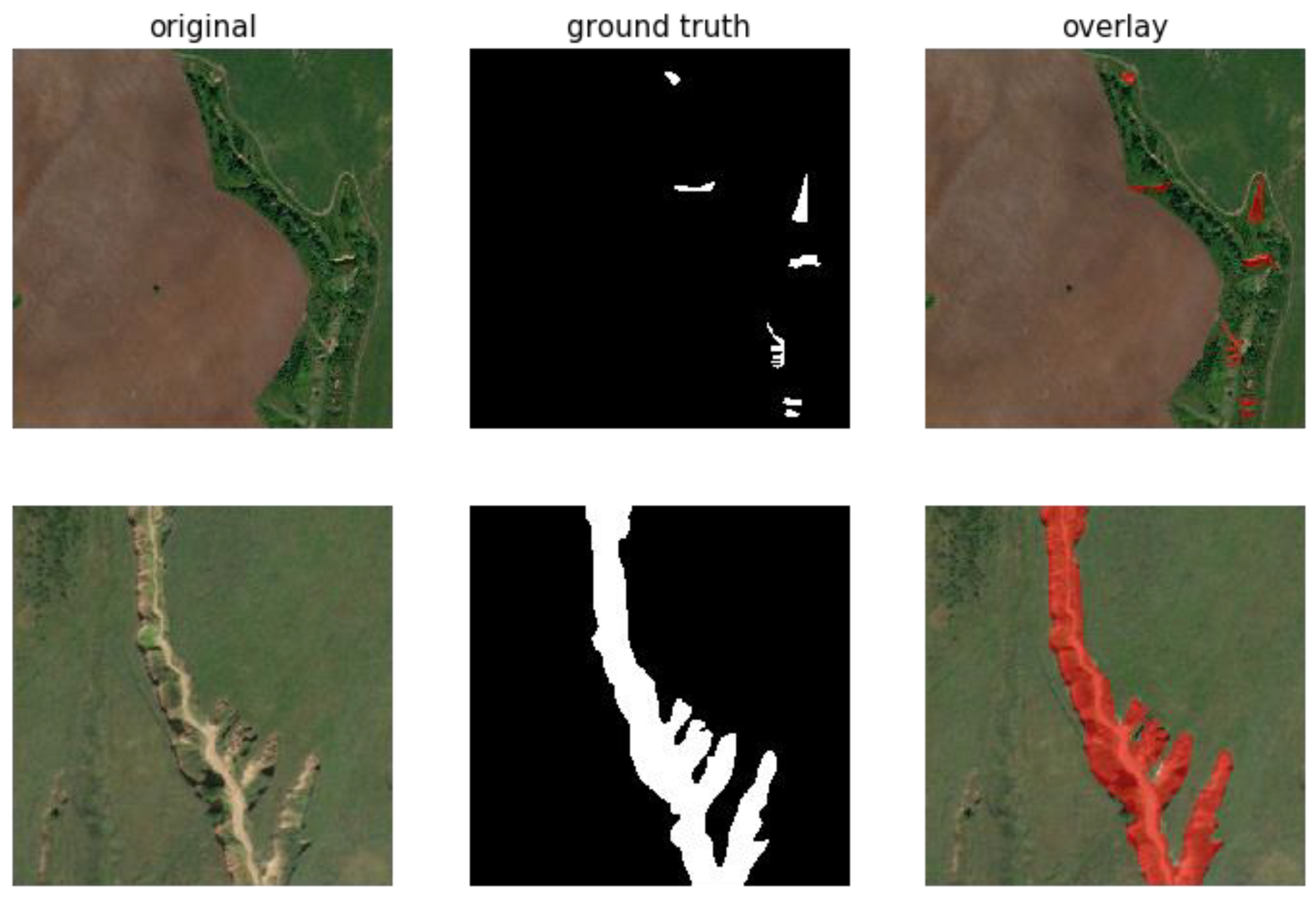
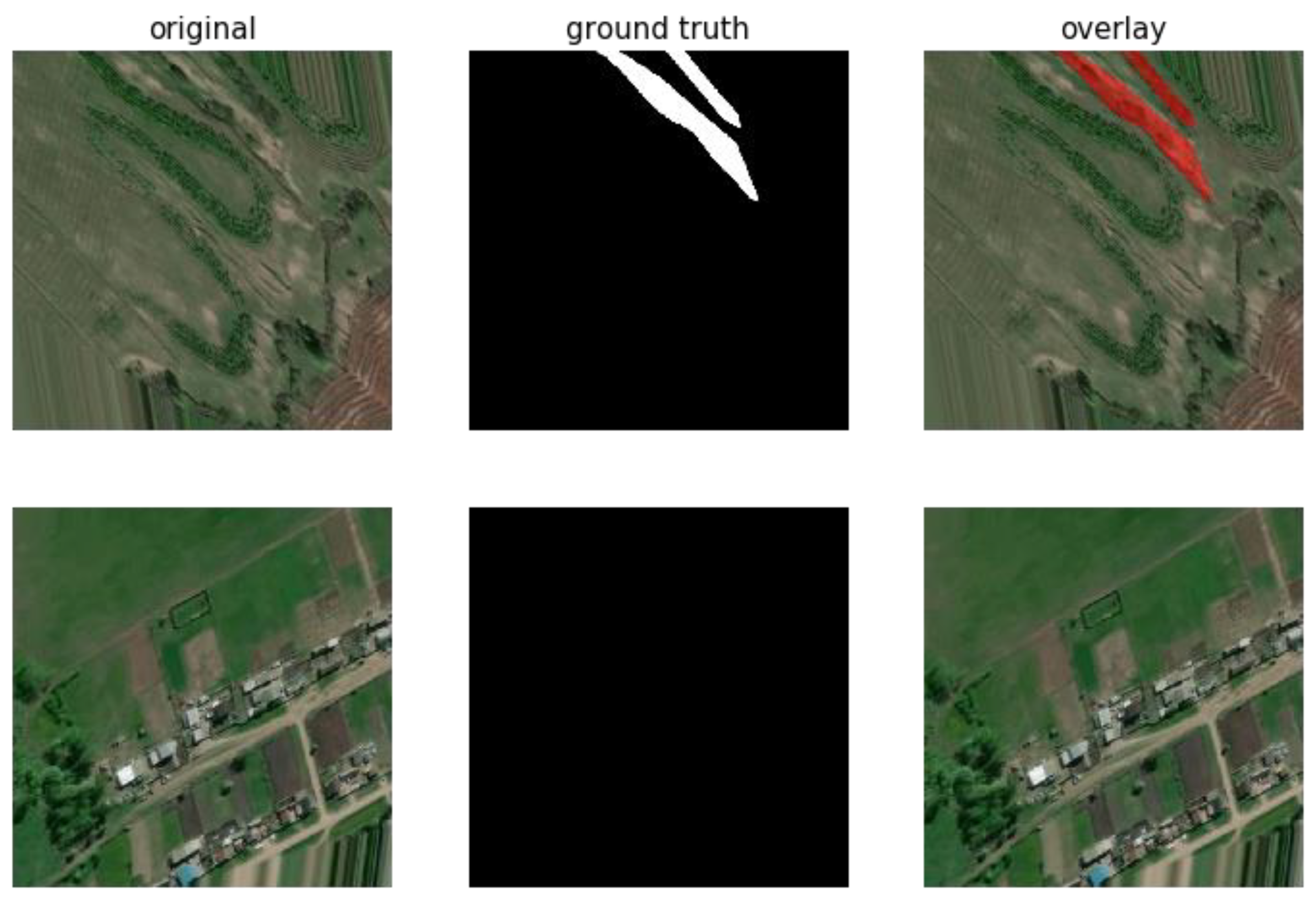
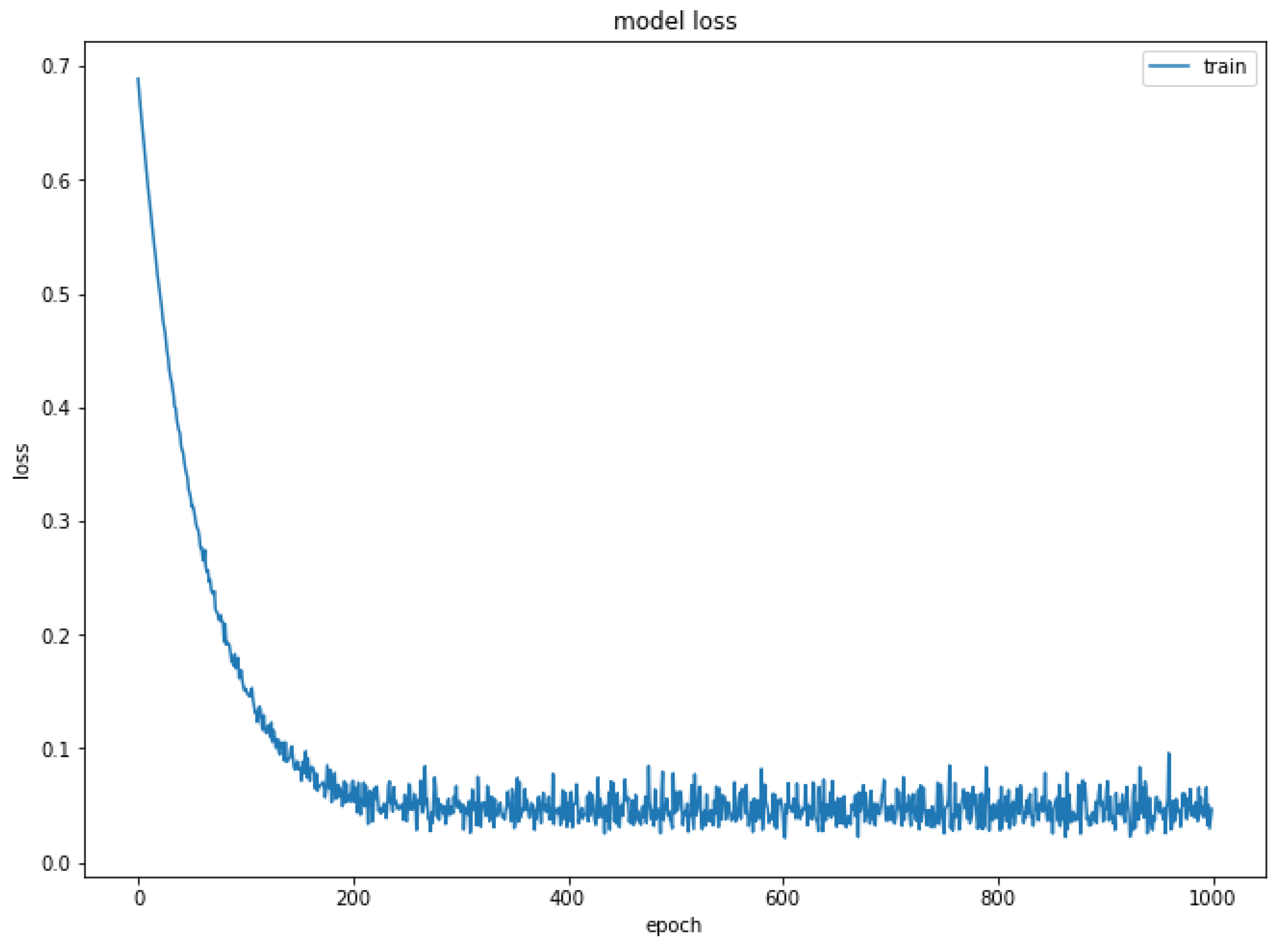
3. Results
4. Discussion
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Sorokin, A.; Bryzzhev, A.; Strokov, A.; Mirzabaev, A.; Johnson, T.; Kiselev, S.V. The Economics of Land Degradation in Russia. In Economics of Land Degradation and Improvement—A Global Assessment for Sustainable Development; Nkonya, E., Mirzabaev, A., von Braun, J., Eds.; Springer International Publishing: Cham, Switzerland, 2016; pp. 541–576. ISBN 978-3-319-19167-6. [Google Scholar]
- Yermolaev, O.P. Basin approach to the study of erosion processes occurring in the territory of the Russian plain. Res. J. Pharm. Biol. Chem. Sci. 2015, 6, 1649–1654. [Google Scholar]
- Yermolaev, O.P. Erosion processes of the forest and forest-steppe zones in the eastern part of the Russian Plain. World Appl. Sci. J. 2014, 29, 453–459. [Google Scholar]
- Aver’yanova, G.A.; Petrov, G.P. Hydrographic network density of the Middle Volga region. Izv Kazan Branch USSR Energy Water Econ. Ser. 1961, 81–96. (In Russian) [Google Scholar]
- Sementovsky, V.N. Regularities of Platform Relief Morphology: (Case Study of Tatarstan); Izd in Kazan. Un-ta: Kazan, Russia, 1963. (In Russian) [Google Scholar]
- Sobolev, S.S. Development and Control of Erosion Processes in the European Part of the USSR; USSR Academy of Sciences Publishing: Moscow, Russia, 1948; Volume 1. (In Russian) [Google Scholar]
- Zorina, E.F. Gully Erosion: Regularities and Development Potential; GEOS, Moscow State University: Moscow, Russia, 2003. (In Russian) [Google Scholar]
- Kosov, B.F.; Konstantinova, G.S. Complex gully map of the plain territory of the USSR. Geomorphol. RAS 1973, 3–9. (In Russian) [Google Scholar]
- Nikol’skaya, I.I.; Prokhorova, S.D. Cartographic method of gully erosion analysis. Geomorphol. RAS 2015, 44. (In Russian) [Google Scholar]
- Yermolaev, O.P.; Rysin, I.I.; Ivanov, M.A.; Medvedeva, R.A.; Zaytseva, M.Y. Database of Growth Dynamics of the Gully Network of the Udmurt Republic and the Republic of Tatarstan 2016. Available online: https://repository.kpfu.ru/eng/?p_id=162281&p_lang=2 (accessed on 27 May 2020).
- Gafurov, A.M.; Rysin, I.I.; Golosov, V.N.; Grigoryev, I.I.; Sharifullin, A.G. Estimation of the recent rate of gully head retreat on the southern megaslope of the East European Plain using a set of instrumental methods. Vestn. Mosk. Univ. Seriya 5 Geogr. 2018, 2018-January, 61–71. [Google Scholar]
- Medvedeva, R.A.; Golosov, V.N.; Ermolaev, O.P. Spatio-Temporal Assessment of Gully Erosion in the Zone of Intensive Agriculture in the European Part of Russia. Geogr. Nat. Resour. 2018, 39, 204–211. [Google Scholar] [CrossRef]
- Lyubimov, B.P.; Kovalev, S.N. The temporal characteristics of gully erosion under different natural conditions. Geomorphol. RAS 2015, 66. [Google Scholar] [CrossRef]
- Mazaeva, O.; Pellinen, V.; Janicki, G. Development of bank gullies on the shore zone of the Bratsk Reservoir (Russia). Ann. Univ. Mariae Curie-Sklodowska Sect. B 2014, 69, 117–133. [Google Scholar] [CrossRef] [Green Version]
- Ryzhov, I.V.; Vyrkin, V.B. Formirovanie ovragov na yuge Vostochnoĭ Sibiri; Akademicheskoe izdatelʹstvo “GEO”: Novosibirsk, Russia, 2015; ISBN 978-5-906284-83-9. [Google Scholar]
- Veretennikova, M.V.; Zorina, E.F.; Lyubimov, B.P.; Nikolskaya, I.I.; Prokhorova, S.D. Maps of contemporary and prognosticated gully cutting of agricultural lands. Geomorfologiya 1997, 27–33. [Google Scholar]
- Zorina, Y.F.; Katash, I.G.; Lyubimov, B.P.; Nikol’Skaya, I.I.; Prokhorova, S.D. New maps of gully erosion. Mapp. Sci. Remote Sens. 1993, 30, 102–107. [Google Scholar] [CrossRef]
- Yermolaev, O.P.; Medvedeva, R.A.; Platoncheva, E.V. Methodological Approaches to Monitoring Erosion of Agricultural Lands in the European Part of Russia by Using Satellite Imagery. Uchenye Zap. Kazan. Univ.-Seriya Estestv. Nauki 2017, 159, 668–680. [Google Scholar]
- Arabameri, A.; Pradhan, B.; Rezaei, K.; Conoscenti, C. Gully erosion susceptibility mapping using GIS-based multi-criteria decision analysis techniques. CATENA 2019, 180, 282–297. [Google Scholar] [CrossRef]
- Conoscenti, C.; Agnesi, V.; Cama, M.; Caraballo-Arias, N.A.; Rotigliano, E. Assessment of Gully Erosion Susceptibility Using Multivariate Adaptive Regression Splines and Accounting for Terrain Connectivity. Land Degrad. Dev. 2018, 29, 724–736. [Google Scholar] [CrossRef]
- D’Oleire-Oltmanns, S.; Marzolff, I.; Tiede, D.; Blaschke, T. Detection of Gully-Affected Areas by Applying Object-Based Image Analysis (OBIA) in the Region of Taroudannt, Morocco. Remote Sens. 2014, 6, 8287–8309. [Google Scholar] [CrossRef] [Green Version]
- Javidan, N.; Kavian, A.; Pourghasemi, H.R.; Conoscenti, C.; Jafarian, Z. Gully Erosion Susceptibility Mapping Using Multivariate Adaptive Regression Splines—Replications and Sample Size Scenarios. Water 2019, 11, 2319. [Google Scholar] [CrossRef] [Green Version]
- Javidan, N.; Kavian, A.; Pourghasemi, H.R.; Conoscenti, C.; Jafarian, Z. Data Mining Technique (Maximum Entropy Model) for Mapping Gully Erosion Susceptibility in the Gorganrood Watershed, Iran. In Gully Erosion Studies from India and Surrounding Regions; Shit, P.K., Pourghasemi, H.R., Bhunia, G.S., Eds.; Springer International Publishing: Cham, Switzerland, 2020; pp. 427–448. ISBN 978-3-030-23242-9. [Google Scholar]
- Liu, K.; Ding, H.; Tang, G.; Na, J.; Huang, X.; Xue, Z.; Yang, X.; Li, F. Detection of Catchment-Scale Gully-Affected Areas Using Unmanned Aerial Vehicle (UAV) on the Chinese Loess Plateau. Isprs Int. J. Geo-Inf. 2016, 5, 238. [Google Scholar] [CrossRef]
- Noto, L.V.; Bastola, S.; Dialynas, Y.G.; Arnone, E.; Bras, R.L. Integration of fuzzy logic and image analysis for the detection of gullies in the Calhoun Critical Zone Observatory using airborne LiDAR data. Isprs J. Photogramm. Remote Sens. 2017, 126, 209–224. [Google Scholar] [CrossRef] [Green Version]
- Shahabi, H.; Jarihani, B.; Tavakkoli Piralilou, S.; Chittleborough, D.; Avand, M.; Ghorbanzadeh, O. A Semi-Automated Object-Based Gully Networks Detection Using Different Machine Learning Models: A Case Study of Bowen Catchment, Queensland, Australia. Sensors 2019, 19, 4893. [Google Scholar] [CrossRef] [Green Version]
- Mararakanye, N.; Nethengwe, N.S. Gully Features Extraction Using Remote Sensing Techniques. S. Afr. J. Geomat. 2012, 1, 10. [Google Scholar]
- Torkashvand, A.M. Investigation of Some Methodologies for Gully Erosion Mapping. J. Appl. Sci. 2008, 8, 2435–2441. [Google Scholar] [CrossRef]
- Torkashvand, A.M.; Alipour, H.R. Investigation of the Possibility to Prepare Supervised Classification Map of Gully Erosion by RS and GIS. Int. J. Geol. Environ. Eng. 2009, 3, 203–205. [Google Scholar]
- Conoscenti, C.; Angileri, S.; Cappadonia, C.; Rotigliano, E.; Agnesi, V.; Märker, M. Gully erosion susceptibility assessment by means of GIS-based logistic regression: A case of Sicily (Italy). Geomorphology 2014, 204, 399–411. [Google Scholar] [CrossRef] [Green Version]
- Tarolli, P. High-resolution topography for understanding Earth surface processes: Opportunities and challenges. 2014, 216, 295–312. Geomorphology 2014, 216, 295–312. [Google Scholar] [CrossRef]
- Gafurov, A.M. Small catchments DEM creation using Unmanned Aerial Vehicles. IOP Conf. Ser. Earth Environ. Sci. 2018, 107, 012005. [Google Scholar] [CrossRef]
- Yermolaev, O.P.; Gafurov, A.M.; Usmanov, B.M. Evaluation of Erosion Intensity and Dynamics Using Terrestrial Laser Scanning. Eurasian Soil Sci. 2018, 51, 814–826. [Google Scholar] [CrossRef]
- Guirado, E.; Tabik, S.; Alcaraz-Segura, D.; Cabello, J.; Herrera, F. Deep-learning Versus OBIA for Scattered Shrub Detection with Google Earth Imagery: Ziziphus lotus as Case Study. Remote Sens. 2017, 9, 1220. [Google Scholar] [CrossRef] [Green Version]
- Ma, L.; Liu, Y.; Zhang, X.; Ye, Y.; Yin, G.; Johnson, B.A. Deep learning in remote sensing applications: A meta-analysis and review. ISPRS J. Photogramm. Remote Sens. 2019, 152, 166–177. [Google Scholar] [CrossRef]
- Zhu, X.X.; Tuia, D.; Mou, L.; Xia, G.-S.; Zhang, L.; Xu, F.; Fraundorfer, F. Deep Learning in Remote Sensing: A Comprehensive Review and List of Resources. IEEE Geosci. Remote Sens. Mag. 2017, 5, 8–36. [Google Scholar] [CrossRef] [Green Version]
- Li, W.; Fu, H.; Yu, L.; Gong, P.; Feng, D.; Li, C.; Clinton, N. Stacked Autoencoder-based deep learning for remote-sensing image classification: a case study of African land-cover mapping. Int. J. Remote Sens. 2016, 37, 5632–5646. [Google Scholar] [CrossRef]
- Mondal, A.; Khare, D.; Kundu, S.; Mukherjee, S.; Mukhopadhyay, A.; Mondal, S. Uncertainty of soil erosion modelling using open source high resolution and aggregated DEMs. Geosci. Front. 2017, 8, 425–436. [Google Scholar] [CrossRef] [Green Version]
- Zhang, Z.; Liu, Q.; Wang, Y. Road Extraction by Deep Residual U-Net. IEEE Geosci. Remote Sens. Lett. 2018, 15, 749–753. [Google Scholar] [CrossRef] [Green Version]
- Basu, S.; Ganguly, S.; Mukhopadhyay, S.; DiBiano, R.; Karki, M.; Nemani, R. DeepSat: A learning framework for satellite imagery. In Proceedings of the 23rd SIGSPATIAL International Conference on Advances in Geographic Information Systems, Seattle, DC, USA, , 3–6 November 2015; pp. 1–10. [Google Scholar]
- Narine, L.L.; Popescu, S.C.; Malambo, L. Synergy of ICESat-2 and Landsat for Mapping Forest Aboveground Biomass with Deep Learning. Remote Sens. 2019, 11, 1503. [Google Scholar] [CrossRef]
- Papadomanolaki, M.; Vakalopoulou, M.; Zagoruyko, S.; Karantzalos, K. Benchmarking deep learning frameworks for the classification of very high resolution satellite multispectral data. ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2016, III–7, 83–88. [Google Scholar] [CrossRef]
- Scott, G.J.; England, M.R.; Starms, W.A.; Marcum, R.A.; Davis, C.H. Training Deep Convolutional Neural Networks for Land–Cover Classification of High-Resolution Imagery. IEEE Geosci. Remote Sens. Lett. 2017, 14, 549–553. [Google Scholar] [CrossRef]
- Shafaey, M.A.; Salem, M.A.-M.; Ebied, H.M.; Al-Berry, M.N.; Tolba, M.F. Deep Learning for Satellite Image Classification. In Proceedings of the International Conference on Advanced Intelligent Systems and Informatics, Cairo, Egypt, 1–3 September 2018; Hassanien, A.E., Tolba, M.F., Shaalan, K., Azar, A.T., Eds.; Springer International Publishing: Cham, Switzerland, 2019; pp. 383–391. [Google Scholar]
- Zou, Q.; Ni, L.; Zhang, T.; Wang, Q. Deep Learning Based Feature Selection for Remote Sensing Scene Classification. IEEE Geosci. Remote Sens. Lett. 2015, 12, 2321–2325. [Google Scholar] [CrossRef]
- Krizhevsky, A.; Sutskever, I.; Hinton, G.E. ImageNet classification with deep convolutional neural networks. Commun. ACM 2017, 60, 84–90. [Google Scholar] [CrossRef]
- Szegedy, C.; Liu, W.; Jia, Y.; Sermanet, P.; Reed, S.; Anguelov, D.; Erhan, D.; Vanhoucke, V.; Rabinovich, A. Going deeper with convolutions. In Proceedings of the 2015 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Boston, MA, USA, 7–12 June 2015; IEEE: Boston, MA, USA, 2015; pp. 1–9. [Google Scholar]
- Simonyan, K.; Zisserman, A. Very deep convolutional networks for large-scale image recognition. arXiv 2015, arXiv:1409.1556, 14. [Google Scholar]
- Vanmaercke, M.; Poesen, J.; Van Mele, B.; Demuzere, M.; Bruynseels, A.; Golosov, V.; Bezerra, J.F.R.; Bolysov, S.; Dvinskih, A.; Frankl, A.; et al. How fast do gully headcuts retreat? Earth-Sci. Rev. 2016, 154, 336–355. [Google Scholar] [CrossRef]
- Yermolayev, O.P.; Rysin, I.I.; Golosov, V.N. Mapping assessment of gully erosion in the east of the Russian plain. Geomorphol. RAS 2017, 38–51. [Google Scholar] [CrossRef]
- Medvedeva, R.A. Trends of the gully erosion development in the territory of the Republic of Tatarstan. IOP Conf. Ser. Earth Environ. Sci. 2018, 107, 012016. [Google Scholar] [CrossRef]
- HERE WeGo. Available online: https://wego.here.com/ (accessed on 16 January 2020).
- Home—Keras Documentation. Available online: https://keras.io/ (accessed on 17 January 2020).
- Ronneberger, O.; Fischer, P.; Brox, T. U-Net: Convolutional Networks for Biomedical Image Segmentation. arXiv 2015, arXiv:150504597. [Google Scholar]







© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gafurov, A.M.; Yermolayev, O.P. Automatic Gully Detection: Neural Networks and Computer Vision. Remote Sens. 2020, 12, 1743. https://doi.org/10.3390/rs12111743
Gafurov AM, Yermolayev OP. Automatic Gully Detection: Neural Networks and Computer Vision. Remote Sensing. 2020; 12(11):1743. https://doi.org/10.3390/rs12111743
Chicago/Turabian StyleGafurov, Artur M., and Oleg P. Yermolayev. 2020. "Automatic Gully Detection: Neural Networks and Computer Vision" Remote Sensing 12, no. 11: 1743. https://doi.org/10.3390/rs12111743
APA StyleGafurov, A. M., & Yermolayev, O. P. (2020). Automatic Gully Detection: Neural Networks and Computer Vision. Remote Sensing, 12(11), 1743. https://doi.org/10.3390/rs12111743