S3MPC: Improvement on Inland Water Tracking and Water Level Monitoring from the OLTC Onboard Sentinel-3 Altimeters


Abstract
1. Introduction
2. The Sentinel-3 Mission and Altimetric Data
2.1. The S3 Satellites
2.2. The Altimetry Datasets
2.3. The Open-Loop Tracking Mode, Open-Loop Tracking Command Principle and its Expansion Process
2.4. Further Improvements of the OLTC
3. Methods
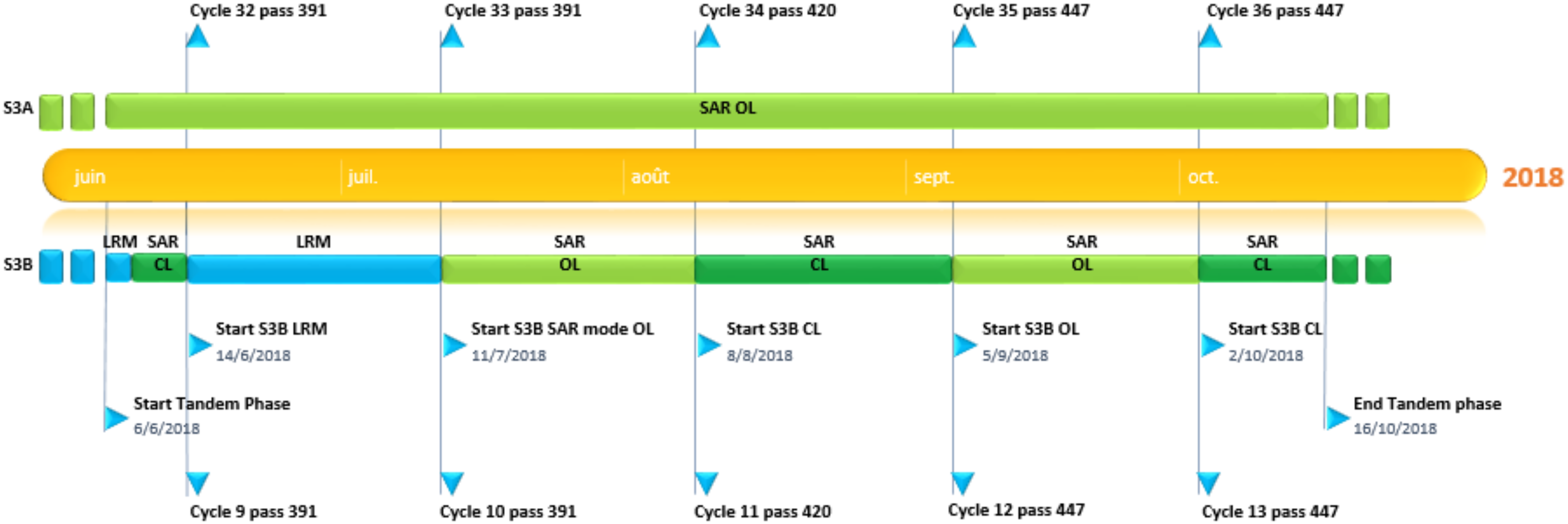
3.1. Timeline and Use of the Tandem Phase Data for the Different Purposes
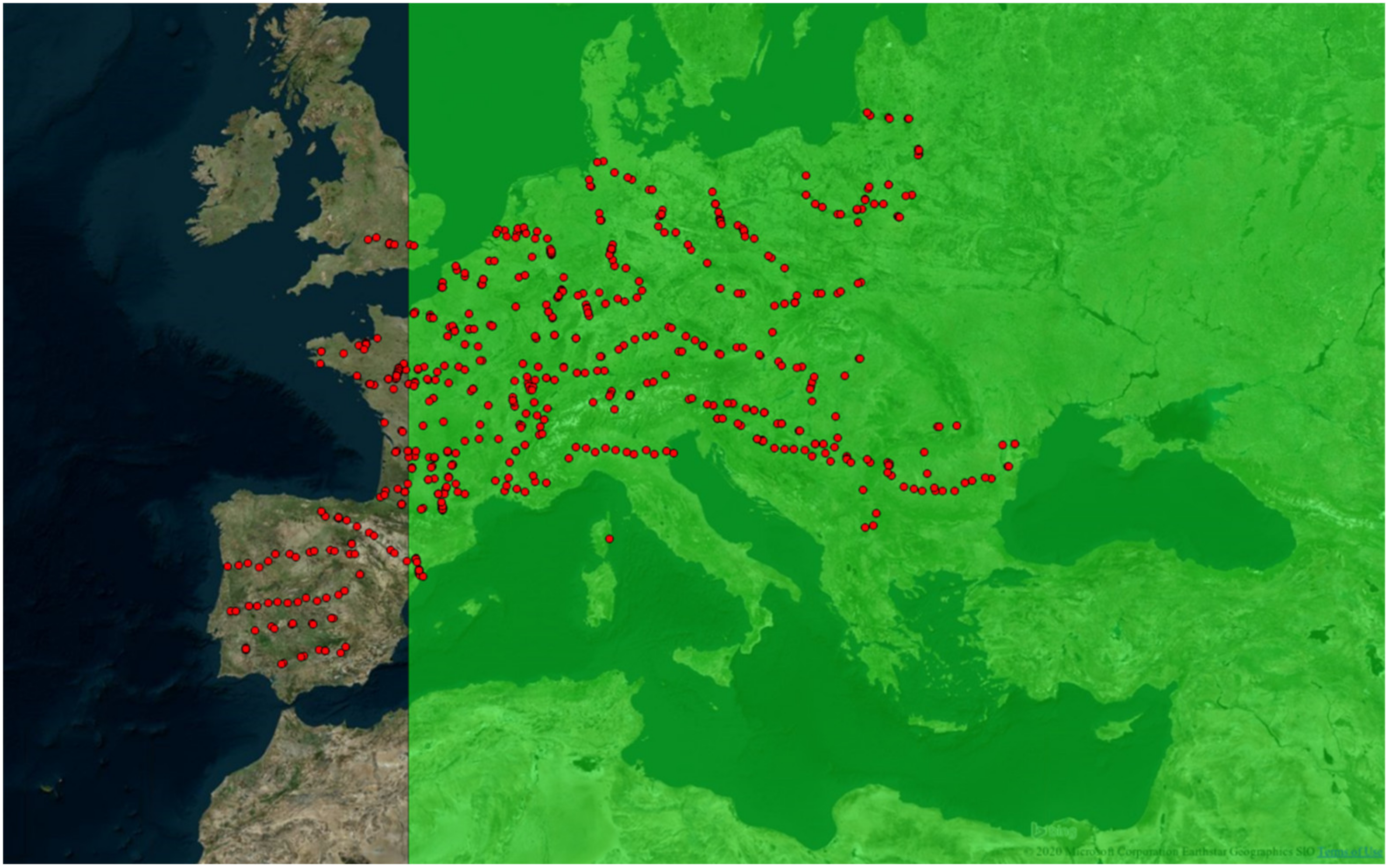
3.2. Target Selection
3.3. Editing Performed on the 20 Hz Data
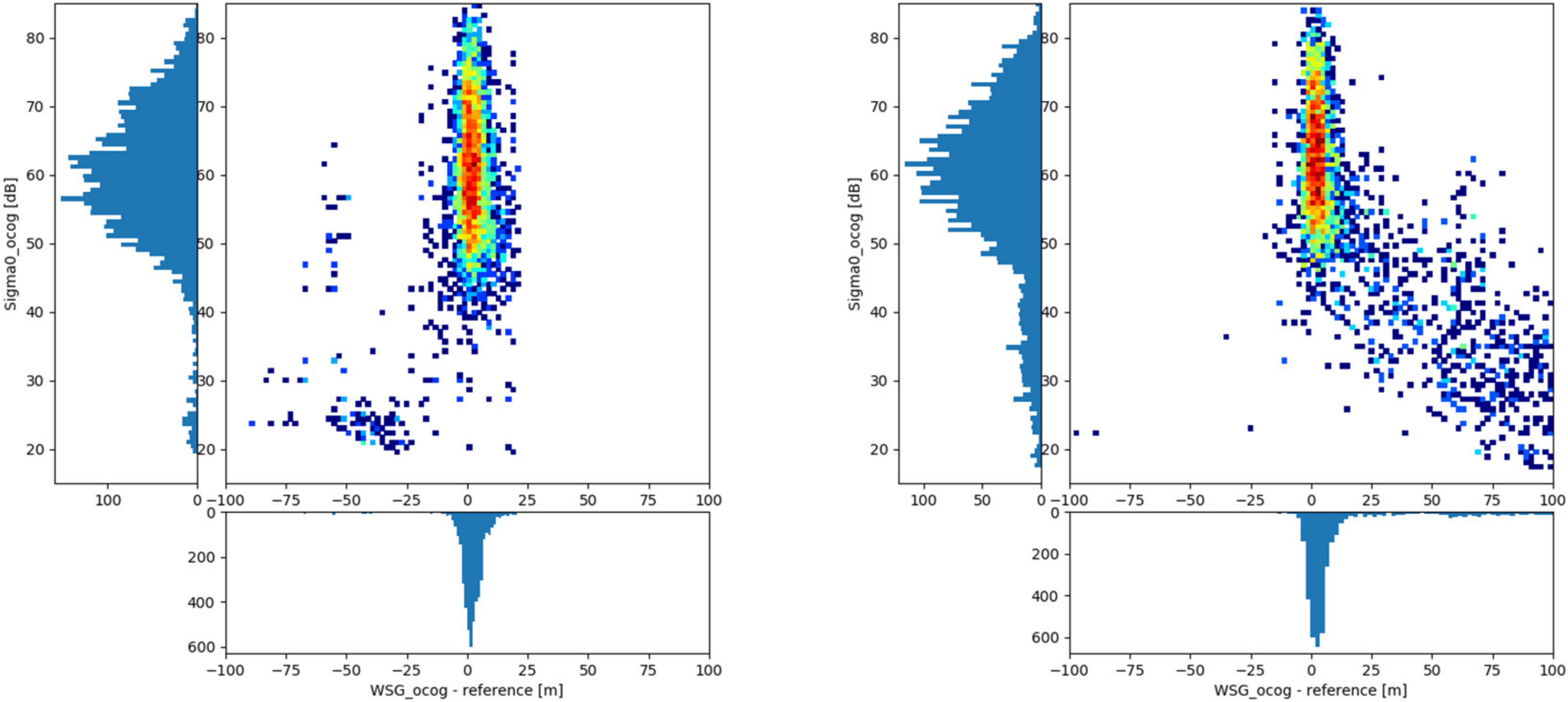
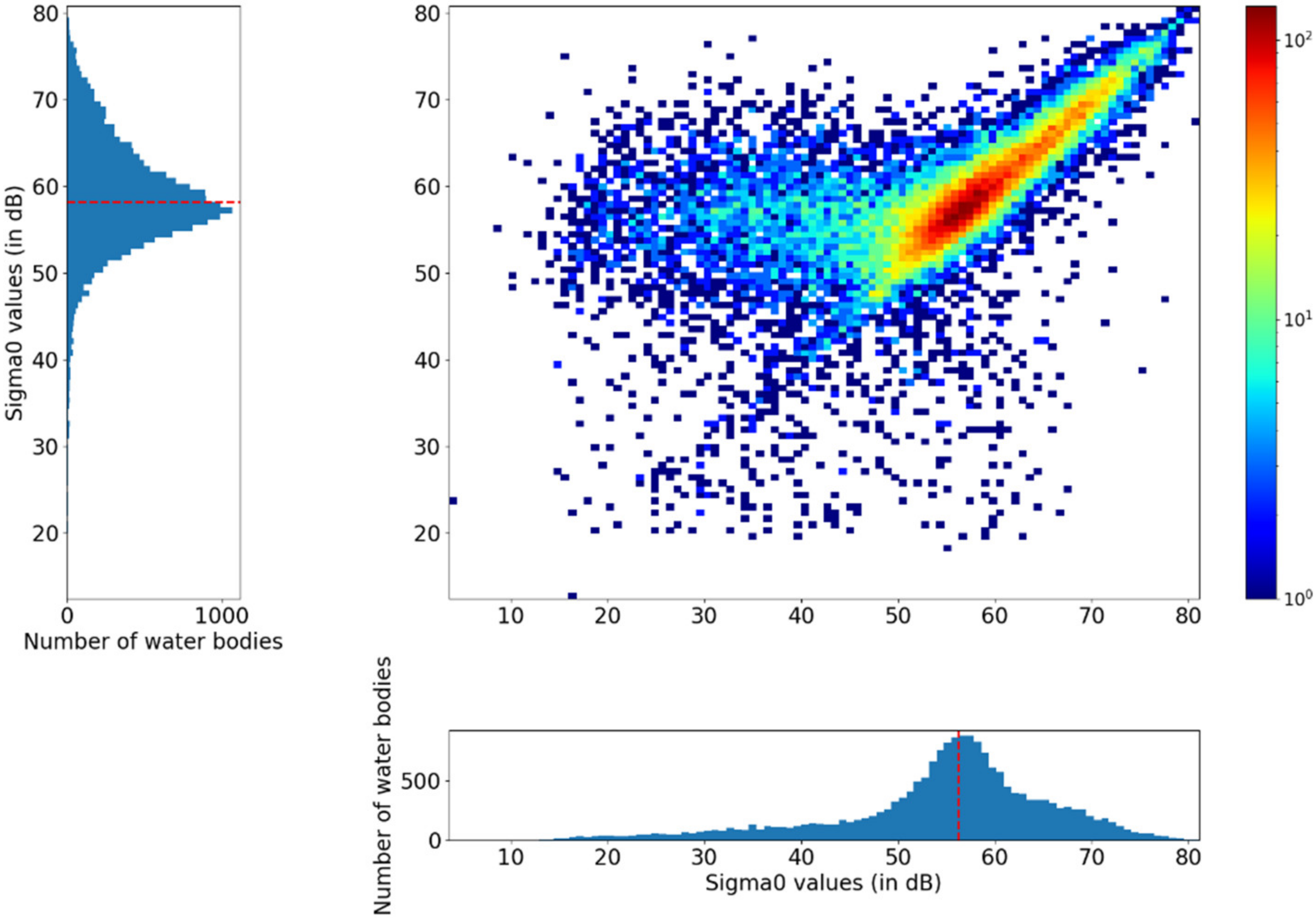
- Sigma0 OCOG thresholding:
- ○
- Only 20 Hz points with a Sigma0 OCOG value higher than 55 dB over rivers and 45 dB over lakes are selected. The thresholds were empirically estimated based on the Sigma0 OCOG distributions over these two types of targets. We point out that these thresholds correspond to the Sigma0 OCOG values of the L2 S3 PDGS Land products prior to the L2 processing baseline IPF-SM-2 v. 6.18 that was installed in January 2020. This processing baseline introduced a −18 dB (−10 log(64) [38]) correction on all Sigma0 OCOG values (switch on Cycle 53 Pass 116 for S3A and Cycle 34 Pass 598 for S3B of the STC products). This editing can be applied for more recent data by shifting the Sigma0 OCOG thresholds by about −18 dB.
- ○
- Among the points selected in the previous step, the 50% percentile of the points presenting the highest Sigma0 OCOG values is then selected.
- Criteria on WSH standard dispersion:
- ○
- The median value of the selected 20 Hz points over the same transect is computed.
- ○
- Only 20 Hz points within 10 m of the median value are selected.
- ○
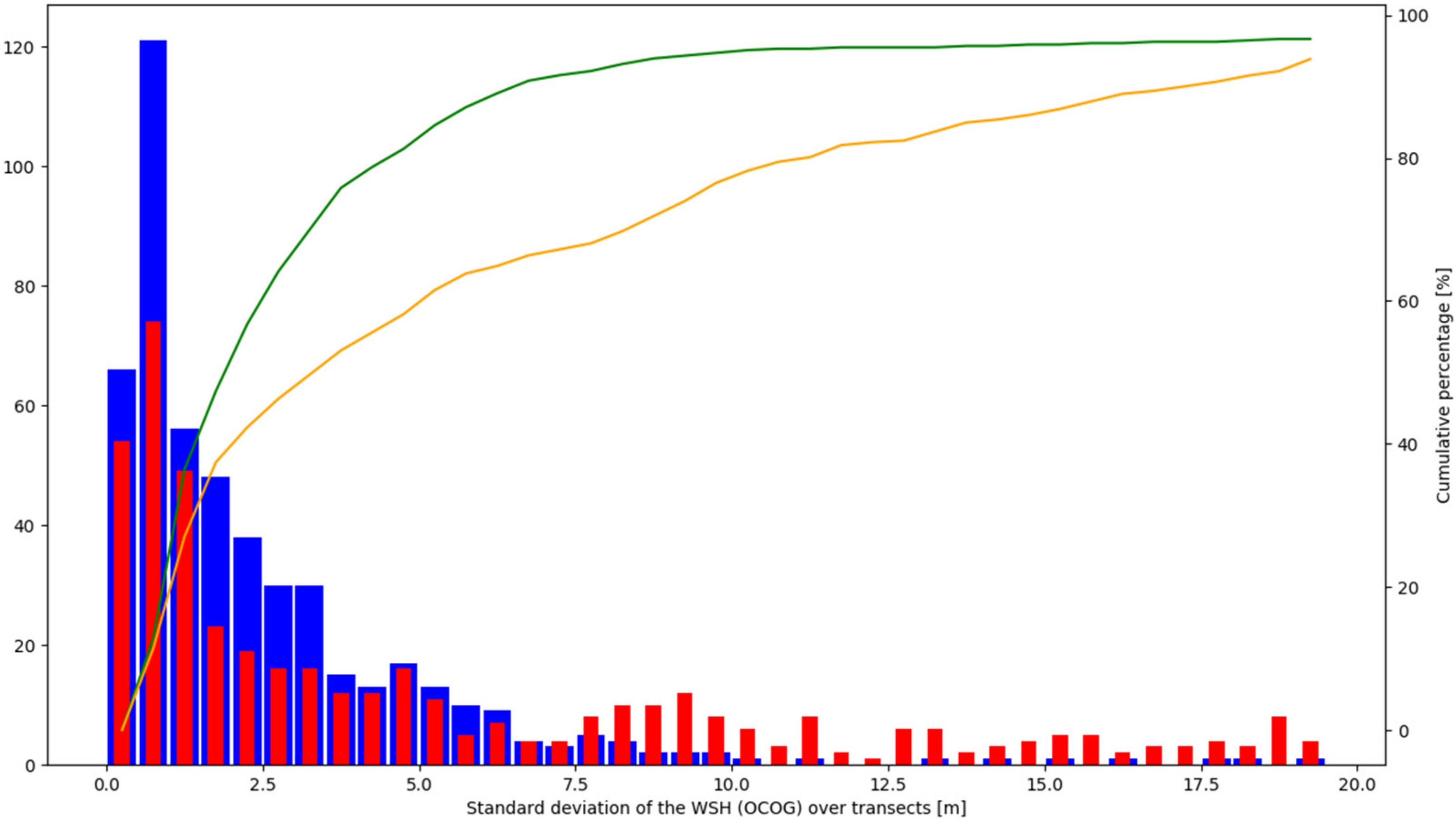
- The standard deviation () of the selected 20 Hz points over a similar transect are computed.
- ○
- Only 20 Hz points within three times the standard deviation around the median value are selected.
- ○
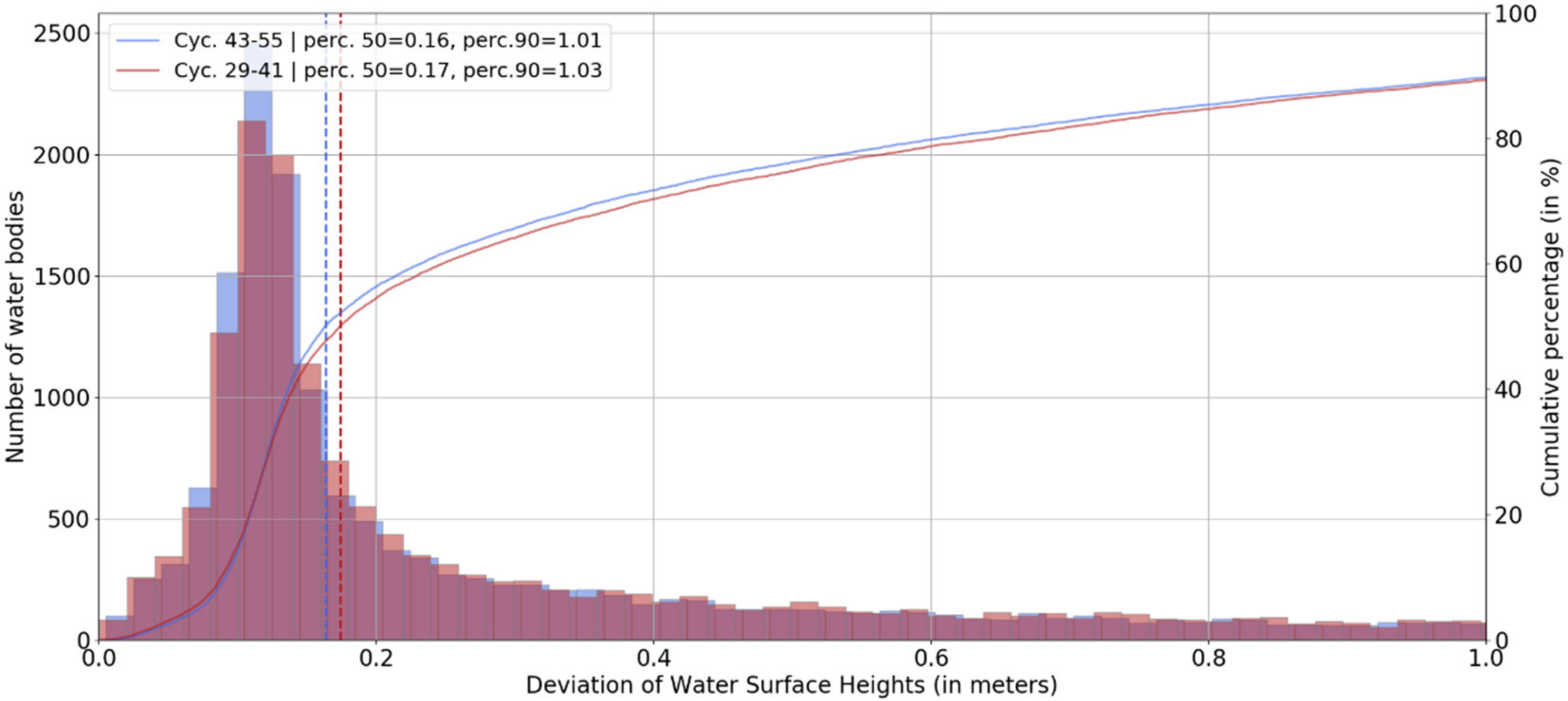
- The final “compressed” value of the WSH estimate of the transect is computed as the median of the selected 20 Hz points. The standard deviation of the valid points is also computed (denoted as ).
4. Results
4.1. Improvements of the Retrievals in OL Compared to the CL Tracking Mode
4.1.1. Exploiting the Tandem Phase to Compare Similar Scenes in CL and OL
4.1.2. Sentinel-3A Switch from CL to OL Tracking Modes
4.2. Benefits of the Improvements of the Open-Loop Tracking Command
- Comparison of the S3A performances in OL over targets over which the OLTC was fine-tuned already in OLTCv4.2. This is mainly a sanity check diagnosis; no particular difference is expected (unless the OLTC is erroneous in one OLTC version).
- Comparison of the S3A performances in OL over targets over which no fine-tuned OLTC value (therefore the OLTC for these targets consisted of an interpolation) was defined in OLTCv4.2. This study case is expected to emphasize the improvements, in terms of water tracking and water level estimations, by switching from an “interpolated” OLTC to a tuned one.
4.2.1. Over Targets Already Having a Fine-Tuned Elevation Prior in OLTCv4.2
4.2.2. Over Targets Without a Fine-Tuned Elevation Prior in OLTCv4.2 (but Nevertheless Observed with the OL Tracking Mode)
4.2.3. Global v. 4.2 to v. 5.0 Improvements
5. Discussion
- The margins observed at the beginning and end of the range window should allow the altimeter to better capture the WSH variation along the hydrologic cycle of the water bodies.
- The heights retracked over a transect should be more stable in the OL mode than in the CL mode.
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Glossary
| ATBD | Algorithm Theoretical Basis Document |
| CL | Closed-Loop |
| DEM | Digital Elevation Model |
| DAHITI | Database for Hydrological Time Series of Inland Waters |
| ECMWF | European Center for Medium-Range Weather Forecasts |
| EGM2008 | Earth Gravitational Model 2008 |
| GLWD | Global Lakes and Wetlands Database |
| GMT | Generic Mapping Tool |
| GRaND | Global Reservoir and Dam Database |
| G-REALM | Global Reservoir and Lakes Monitor |
| GSWE | Global Surface Water Explorer |
| LRM | Low-Resolution Mode |
| MPC | Mission Performance Center |
| MWR | Microwave Radiometer |
| OCOG | Offset Center of Gravity |
| OL | Open-Loop |
| OLCI | Ocean and Land Color Instrument |
| OLTC | Open-Loop Tracking Command |
| PDGS | Payload Data Ground Segment |
| S3A | Sentinel-3A |
| S3B | Sentinel-3B |
| SAR | Synthetic Aperture Radar |
| SIRAL | SAR Interferometric Radar Altimeter |
| SLSTR | Sea and Land Surface Temperature Radiometer |
| SRAL | SAR Radar Altimeter |
| SRTM | Shuttle Radar Topography Mission |
| STC | Short-Time Critical |
| SWBD | SRTM Water Body Data |
| VS | Virtual Station |
| WSH | Water Surface Height |
References
- Calmant, S.; Seyler, F.; Cretaux, J.F. Monitoring Continental Surface Waters by Satellite Altimetry. Surv. Geophys. 2008, 29, 247–269. [Google Scholar] [CrossRef]
- Alsdorf, D.E.; Rodríguez, E.; Lettenmaier, D.P. Measuring surface water from space. Rev. Geophys. 2007, 45. [Google Scholar] [CrossRef]
- Crétaux, J.F.; Birkett, C. Lake studies from satellite radar altimetry. Comptes Rendus Geosci. 2006, 338, 1098–1112. [Google Scholar] [CrossRef]
- Jarihani, A.A.; Callow, J.N.; Johansen, K.; Gouweleeuw, B. Evaluation of multiple satellite altimetry data for studying inland water bodies and river floods. J. Hydrol. 2013, 505, 78–90. [Google Scholar] [CrossRef]
- Alsdorf, D.; Lettenmaier, D.; Vörösmarty, C. The need for global, satellite-based observations of terrestrial surface waters. Eos Trans. Am. Geophys. Union 2003, 84, 269–276. [Google Scholar] [CrossRef]
- Cretaux, J.-F.; Jelinski, V.; Calmant, S.; Kouraev, A.; Vuglinski, V.; Bergé-Nguyen, M.; Gennero, M.-C.; Nino, F.; del Rio, R.A.; Cazenave, A.; et al. SOLS, a lake database to monitor in Near real time water level storage variations from remote sensing data. Adv. Space Res. 2011, 47, 1497–1507. [Google Scholar] [CrossRef]
- Birkett, C.M.; Ricko, M.; Beckley, B.D.; Yang, X.; Tetrault, R.L. G-REALM: A lake/reservoir monitoring tool for drought monitoring and water resources management. In AGU Fall Meeting Abstracts; AGUFM, H23P-02; American Geophysical Union: Washington, DC, USA, 2017. [Google Scholar]
- Schwatke, C.; Dettmering, D. DAHITI: Inland Water Levels from Space for Climate Studies. In Proceedings of the IAG Workshop: Satellite Geodesy for Climate Studies, Bonn, Germany, 19–21 September 2017. [Google Scholar]
- Labroue, S.; Boy, F.; Picot, N.; Urvoy, M.; Ablain, M. First quality assessment of the Cryosat-2 altimetric system over ocean. Adv. Space Res. 2012, 50, 1030–1045. [Google Scholar] [CrossRef]
- Boy, F.; Desjonqueres, J.D.; Picot, N.; Moreau, T.; Raynal, M. CryoSat-2 SAR-mode over oceans: Processing methods, global assessment, and benefits. IEEE Trans. Geosci. Remote Sens. 2016, 55, 148–158. [Google Scholar] [CrossRef]
- Rinne, E.; Similä, M. Utilisation of CryoSat-2 SAR altimeter in operational ice charting. Cryosphere 2016, 10, 121–131. [Google Scholar] [CrossRef]
- Helm, V.; Humbert, A.; Miller, H. Elevation and elevation change of Greenland and Antarctica derived from CryoSat-2. Cryosphere 2014, 8, 1539–1559. [Google Scholar] [CrossRef]
- Villadsen, H.; Deng, X.; Andersen, O.B.; Stenseng, L.; Nielsen, K.; Knudsen, P. Improved inland water levels from SAR altimetry using novel empirical and physical retrackers. J. Hydrol. 2016, 537, 234–247. [Google Scholar] [CrossRef]
- Nielsen, K.; Stenseng, L.; Andersen, O.B.; Villadsen, H.; Knudsen, P. Validation of CryoSat-2 SAR mode based lake levels. Remote Sens. Environ. 2015, 171, 162–170. [Google Scholar] [CrossRef]
- Le Gac, S.; Boy, F.; Blumstein, D.; Lasson, L.; Picot, N. Benefits of the Open-Loop Tracking Command (OLTC): Extending conventional nadir altimetry to inland waters monitoring. Adv. Space Res. 2019. [Google Scholar] [CrossRef]
- Martin-Puig, C.; Leuliette, E.; Lillibridge, J.; Roca, M. Evaluating the Performance of Jason-2 Open-Loop and Closed-Loop Tracker Modes. J. Atmos. Oceanic Technol. 2016, 33, 2277–2288. [Google Scholar] [CrossRef]
- Biancamaria, S.; Schaedele, T.; Blumstein, D.; Frappart, F.; Boy, F.; Desjonqueres, J.-D.; Pottier, C.; Blarel, F.; Fernando, N. Validation of Jason-3 tracking modes over French rivers. Remote Sens. Environ. 2018, 209, 77–89. [Google Scholar] [CrossRef]
- Jiang, L.; Nielsen, K.; Dinardo, S.; Andersen, O.B.; Bauer-Gottwein, P. Evaluation of Sentinel-3 SRAL SAR altimetry over Chinese rivers. Remote Sens. Environ. 2020, 237, 111546. [Google Scholar] [CrossRef]
- Zhang, X.; Jiang, L.; Kittel, C.M.M.; Yao, Z.; Nielsen, K.; Liu, Z.; Wang, R.; Liu, J.; Andersen, O.B.; Bauer-Gottwein, P. On the performance of Sentinel-3 altimetry over new reservoirs: Approaches to determine onboard a priori elevation. Geophys. Res. Lett. 2020, 47, e2020GL088770. [Google Scholar] [CrossRef]
- Frappart, F.; Blarel, F.; Papa, F.; Prigent, C.; Mougin, E.; Paillou, P.; Baup, F.; Zeiger, P.; Salameh, E.; Darrozes, J.; et al. Backscattering signatures at Ka, Ku, C and S bands from low resolution radaraltimetry over land. Adv. Space Res. 2020. [Google Scholar] [CrossRef]
- Kittel, C.M.M.; Jiang, L.; Tøttrup, C.; Bauer-Gottwein, P. Sentinel-3 radar altimetry for river monitoring—A catchment-scale evaluation of satellite water surface elevation from Sentinel-3A and Sentinel-3B. Hydrol. Earth Syst. Sci. Discuss. 2020. [Google Scholar] [CrossRef]
- Michailovsky, C.I.; McEnnis, S.; Berry, P.A.M.; Smith, R.; Bauer-Gottwein, P. River monitoring from satellite radar altimetry in the Zambezi River basin. Hydrol. Earth Syst. Sci. 2012, 16, 2181–2192. [Google Scholar] [CrossRef]
- ESA. Sentinel Online-Overview. Available online: https://sentinel.esa.int/web/sentinel/missions/sentinel-3/satellite-description/orbit (accessed on 31 July 2020).
- ESA. Sentinel Online-Overview-Altimetry Principles. Available online: https://sentinel.esa.int/web/sentinel/user-guides/sentinel-3-altimetry/overview/altimetry-principles (accessed on 31 July 2020).
- Aviso Website. Available online: https://www.aviso.altimetry.fr/techniques/altimetry/principle.html (accessed on 31 July 2020).
- Dinardo, S.; Lucas, B.; Benveniste, J. Sentinel-3 STM SAR ocean retracking algorithm and SAMOSA model. In Proceedings of the 2015 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Milan, Italy, 26–31 July 2015; pp. 5320–5323. [Google Scholar]
- Quartly, G.D.; Nencioli, F.; Raynal, M.; Bonnefond, P. The Roles of the S3MPC: Monitoring, Validation and Evolution of Sentinel-3 altimetry observations. Remote Sens. 2020, 12, 1763. [Google Scholar] [CrossRef]
- Desjonqueres, J.D.; Carayon, G.; Steunou, N.; Lambin, J. POSEIDON-3 Radar Altimeter New Modes and In-Flight Performances. Mar. Geod. 2010, 33, 53–79. [Google Scholar] [CrossRef]
- Wessel, P.; Smith, W.H.F.; Scharroo, R.; Luis, J.; Wobbe, F. Generic Mapping Tools: Improved Version Released. EOS Trans. AGU 2013, 94, 409–410. [Google Scholar] [CrossRef]
- Bicheron, P.; Leroy, M.; Nino, F.; Defourny, P.; Vancutsem, C.; Brockman, C.; Krämer, U.; Berthelot, B.; Miras, B.; Huc, M.; et al. Globcover: A 300 m res. Global land cover product using MERIS time series over 2005/2006. In Proceedings of the 2nd International Symposium on Recent Advances in Quantitative Remote Sensing, Valencia, Spain, 25–29 September 2006. [Google Scholar]
- Smith, R.G.; Berry, P.A.M. Representation of rivers and Lakes within the forthcoming ACE2 GDEM. In Proceedings of the IAG International Symposium on Gravity, Geoid & Earth Observation 2008, Crete, Greece, 23–27 June 2008. [Google Scholar]
- Lehner, B.; Döll, P. Development and validation of a global database of lakes, reservoirs and wetlands. J. Hydrol. 2004, 296, 1–22. [Google Scholar] [CrossRef]
- SWDB. Shuttle Radar Topography Mission Water Body Data. Available online: https://catalog.data.gov/dataset/nasa-shuttle-radar-topography-mission-water-body-data-shapefiles-raster-files-v003 (accessed on 31 July 2020).
- Pekel, J.F.; Cottam, A.; Gorelick, N.; Belward, A.S. High-resolution mapping of global surface water and its long-term changes. Nature 2016, 540, 418–422. [Google Scholar] [CrossRef] [PubMed]
- Lehner, B.; Liermann, C.R.; Revenga, C.; Vörösmarty, C.; Fekete, B.; Crouzet, P.; Döll, P.; Endejan, M.; Frenken, K.; Magome, J.; et al. High-resolution mapping of the world’s reservoirs and dams for sustainable river-flow management. Front. Ecol. Environ. 2011, 9, 494–502. [Google Scholar] [CrossRef]
- Messager, M.L.; Lehner, B.; Grill, G.; Nedeva, I.; Schmitt, O. Estimating the volume and age of water stored in global lakes using a geo-statistical approach. Nat. Commun. 2016, 7, 13603. [Google Scholar] [CrossRef]
- Algorithm Theoretical Basis Document of the Copernicus Global Land Water Level Product. Available online: https://land.copernicus.eu/global/products/wl (accessed on 31 July 2020).
- ESA. Available online: https://sentinel.esa.int/web/sentinel/technical-guides/sentinel-3-altimetry/processing-baseline (accessed on 31 July 2020).
- Gao, Q.; Makhoul, E.; Escorihuela, M.J.; Zribi, M.; Quintana Seguí, P.; García, P.; Roca, M. Analysis of Retrackers’ Performances and Water Level Retrieval over the Ebro River Basin Using Sentinel-3. Remote Sens. 2019, 11, 718. [Google Scholar] [CrossRef]




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Mission | OLTC Version | Date of Activation | Number of Hydro Targets (Total) | Number of Hydro Targets by Type: Rivers/Lakes/Reservoirs/Glaciers, Identified for OLTC Definition | Geographical Area Covered in Open-Loop Mode Over Land |
|---|---|---|---|---|---|
| Sentinel-3A | V4.1 | 18 April 2016 | 2253 | 2007/246/-/- | 4 areas of interest |
| Sentinel-3A | V4.2 | 24 May 2016 | 2253 | 2007/246/-/- | 4 areas of interest |
| Sentinel-3B | V1.0 (tandem) | 6 June 2018 | 2253 | 2007/246/-/- | Global |
| Sentinel-3B | V2.0 | 27 November 2018 | 32,515 | 17,016/14,245/1231/23 | Latitudes inside ± 60° |
| Sentinel-3A | V5.0 | 9 March 2019 | 33,261 | 17,409/14,427/1386/39 | Latitudes inside ±60° |
| Sentinel-3B | V3.0 | 18 June 2020 | 73,629 | 21,719/47,738/4149/23 | Global |
| Sentinel-3A | V6.0 | September 2020 (TBC) | 74,050 | 20,100/47,637/4262/51 | Global |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Taburet, N.; Zawadzki, L.; Vayre, M.; Blumstein, D.; Le Gac, S.; Boy, F.; Raynal, M.; Labroue, S.; Crétaux, J.-F.; Femenias, P. S3MPC: Improvement on Inland Water Tracking and Water Level Monitoring from the OLTC Onboard Sentinel-3 Altimeters. Remote Sens. 2020, 12, 3055. https://doi.org/10.3390/rs12183055
Taburet N, Zawadzki L, Vayre M, Blumstein D, Le Gac S, Boy F, Raynal M, Labroue S, Crétaux J-F, Femenias P. S3MPC: Improvement on Inland Water Tracking and Water Level Monitoring from the OLTC Onboard Sentinel-3 Altimeters. Remote Sensing. 2020; 12(18):3055. https://doi.org/10.3390/rs12183055
Chicago/Turabian StyleTaburet, Nicolas, Lionel Zawadzki, Maxime Vayre, Denis Blumstein, Sophie Le Gac, François Boy, Matthias Raynal, Sylvie Labroue, Jean-François Crétaux, and Pierre Femenias. 2020. "S3MPC: Improvement on Inland Water Tracking and Water Level Monitoring from the OLTC Onboard Sentinel-3 Altimeters" Remote Sensing 12, no. 18: 3055. https://doi.org/10.3390/rs12183055
APA StyleTaburet, N., Zawadzki, L., Vayre, M., Blumstein, D., Le Gac, S., Boy, F., Raynal, M., Labroue, S., Crétaux, J.-F., & Femenias, P. (2020). S3MPC: Improvement on Inland Water Tracking and Water Level Monitoring from the OLTC Onboard Sentinel-3 Altimeters. Remote Sensing, 12(18), 3055. https://doi.org/10.3390/rs12183055