An Evaluation of Image Velocimetry Techniques under Low Flow Conditions and High Seeding Densities Using Unmanned Aerial Systems

 , ,
, ,  ,
,  ,
, 
 , , and
, , and 
Abstract
1. Introduction
2. Methodology
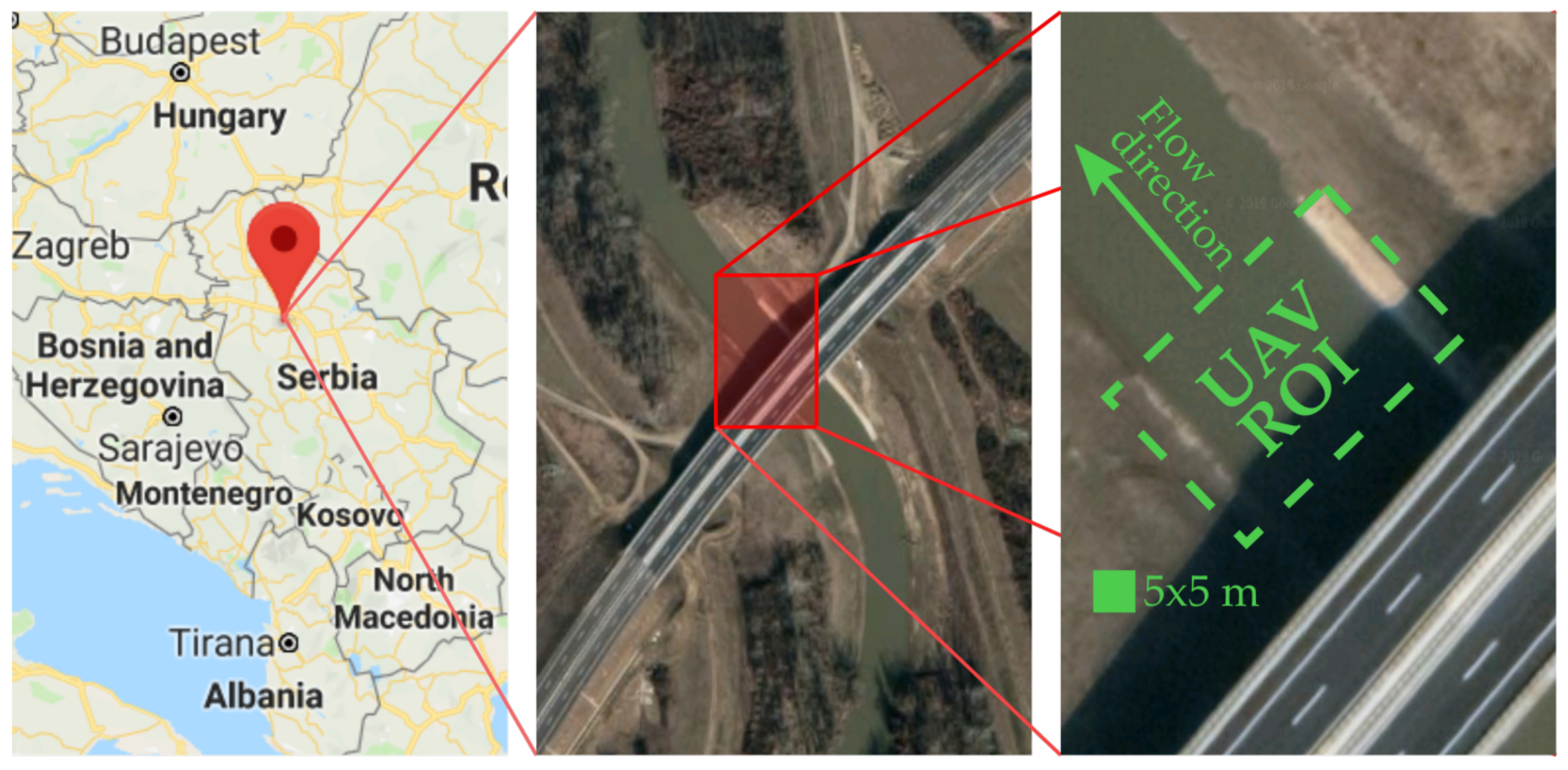
2.1. Study Site
2.2. Experimental Data Acquisition and Data Treatment
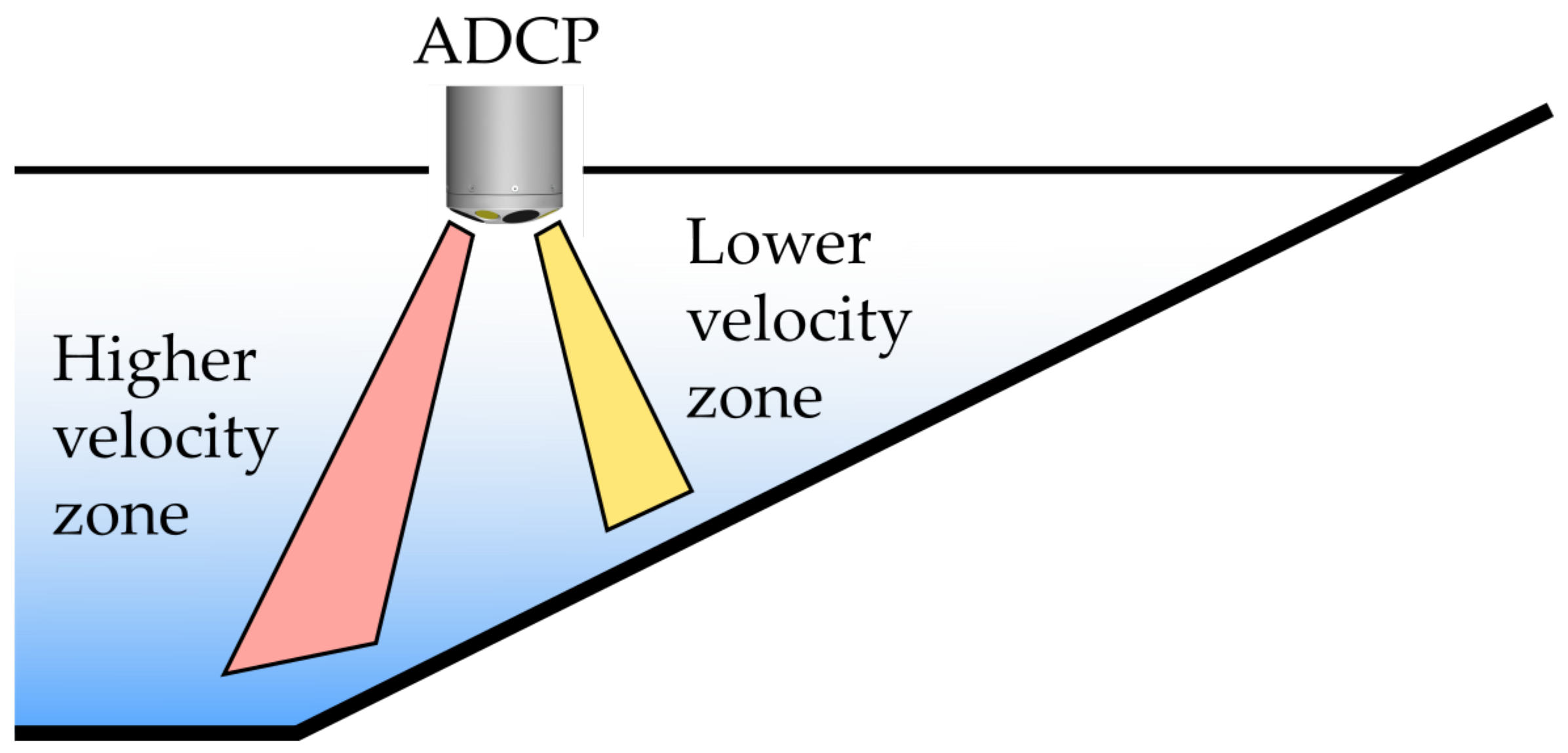
2.2.1. ADCP Processing
2.2.2. Image Processing
2.3. Data Analysis
2.3.1. Sensitivity Analysis
2.3.2. Comparisons of Image Velocimetry Data and ADCP Rreference Data
3. Results
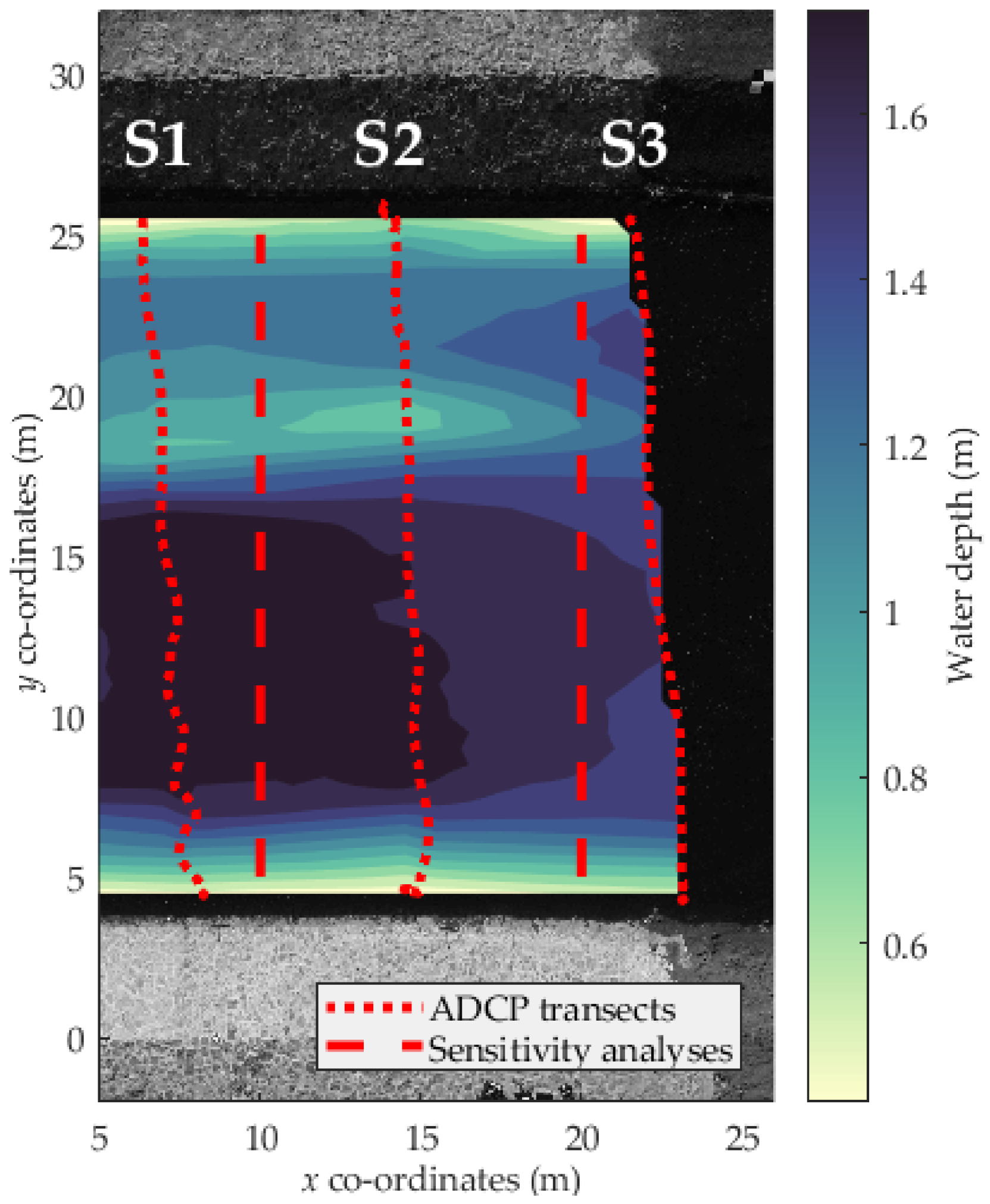
3.1. ADCP Results
3.2. Sensitivity Analysis
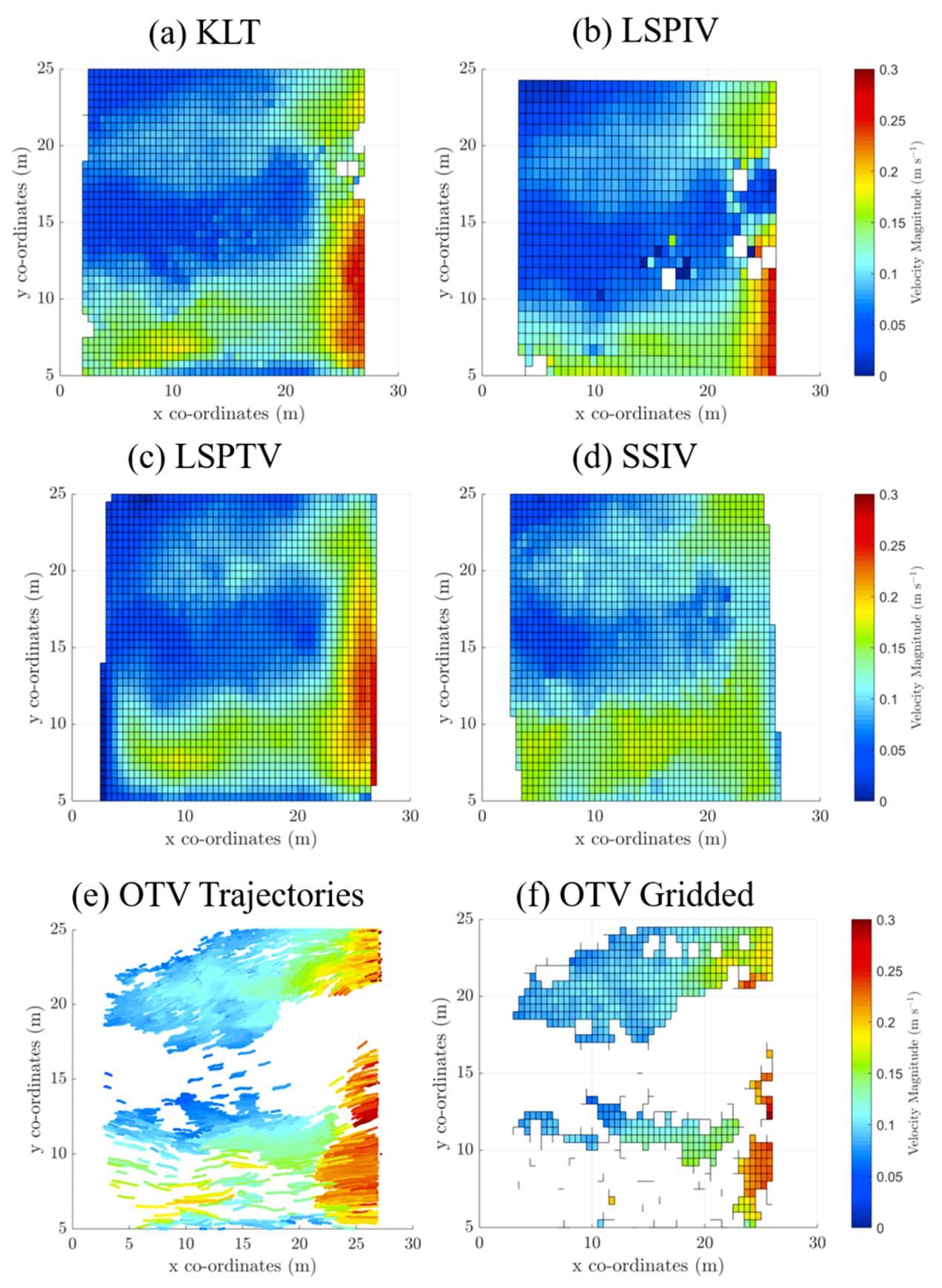
- KLT—2 fps and Block size of 63 pixels
- OTV—4 fps and Trajectory length of 0.5 m (50 pixels)
- LSPIV—4 fps and Interrogation Area of 128 pixels
- LSPTV—4 fps and Interrogation Area of 32 pixels
- SSIV—2 fps and Interrogation Area of 64 pixels
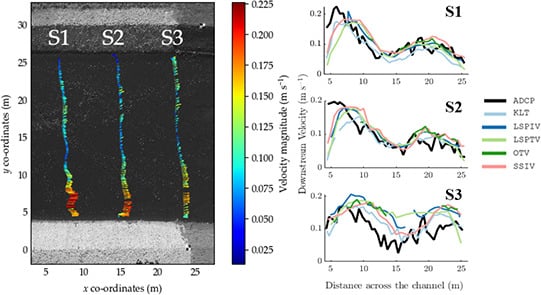
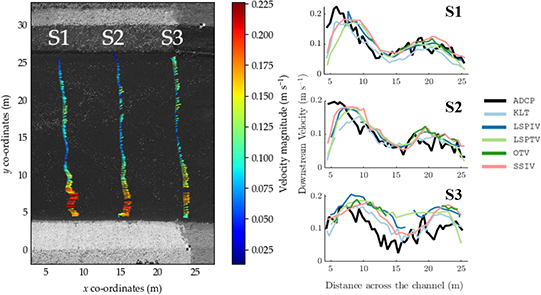
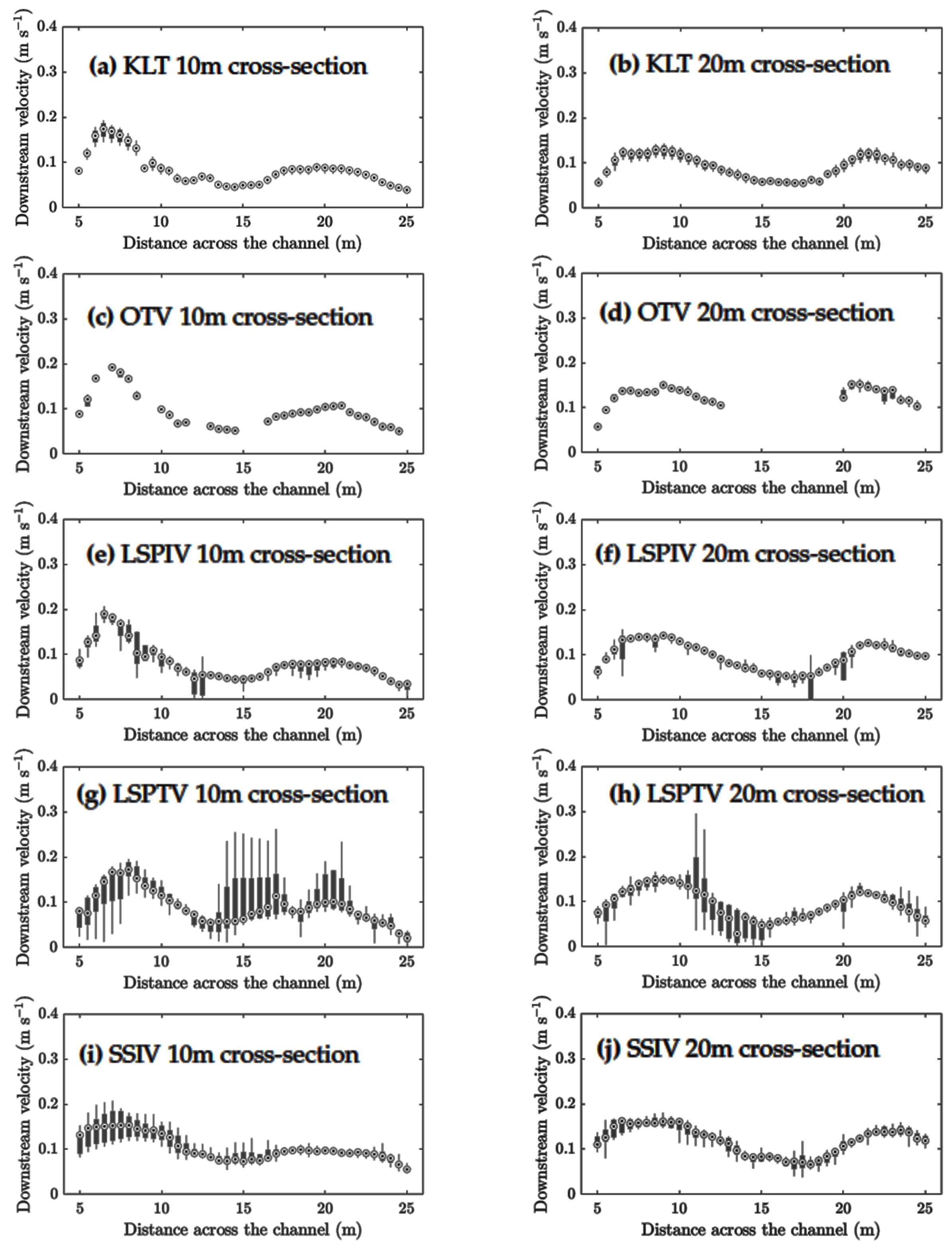
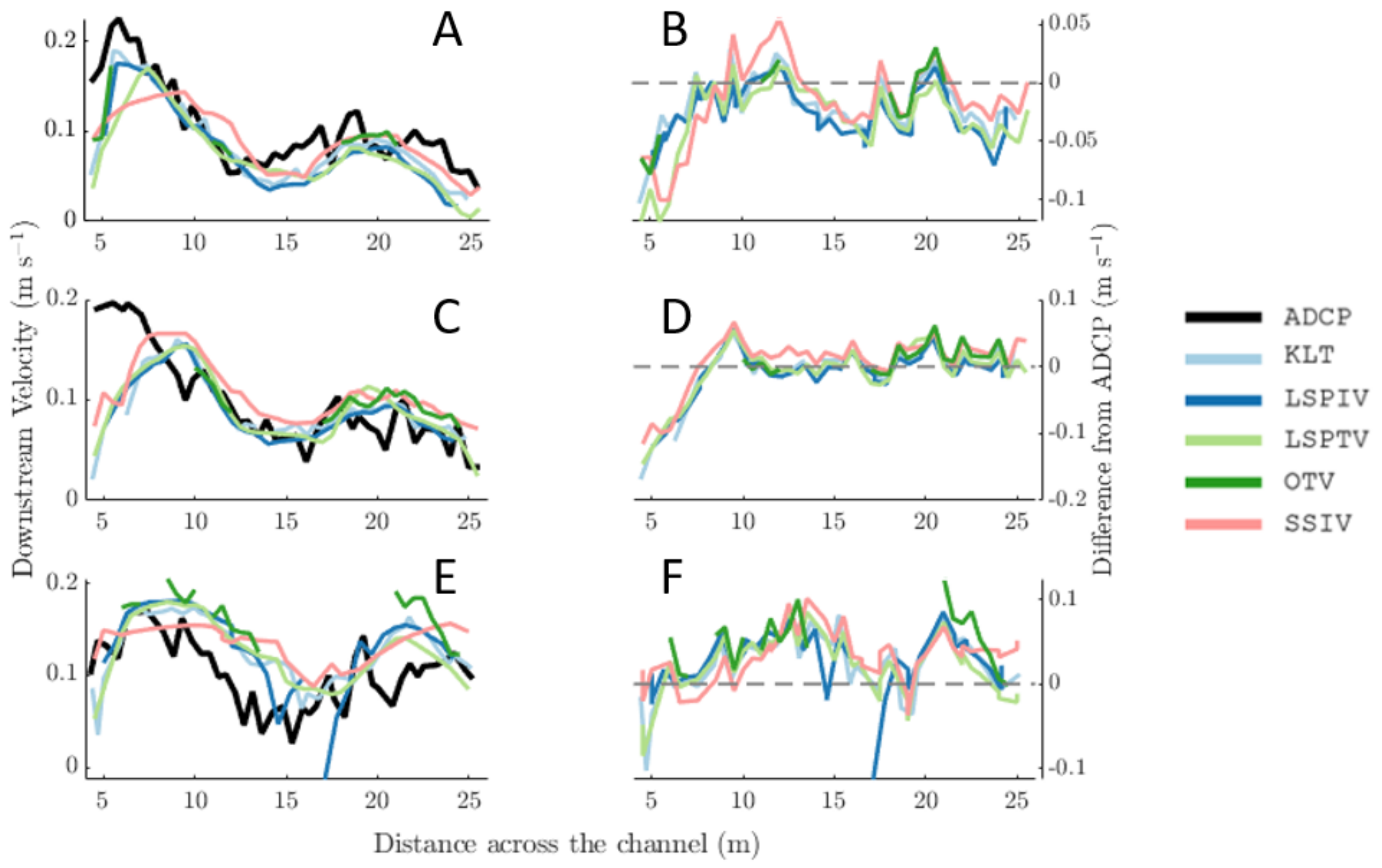
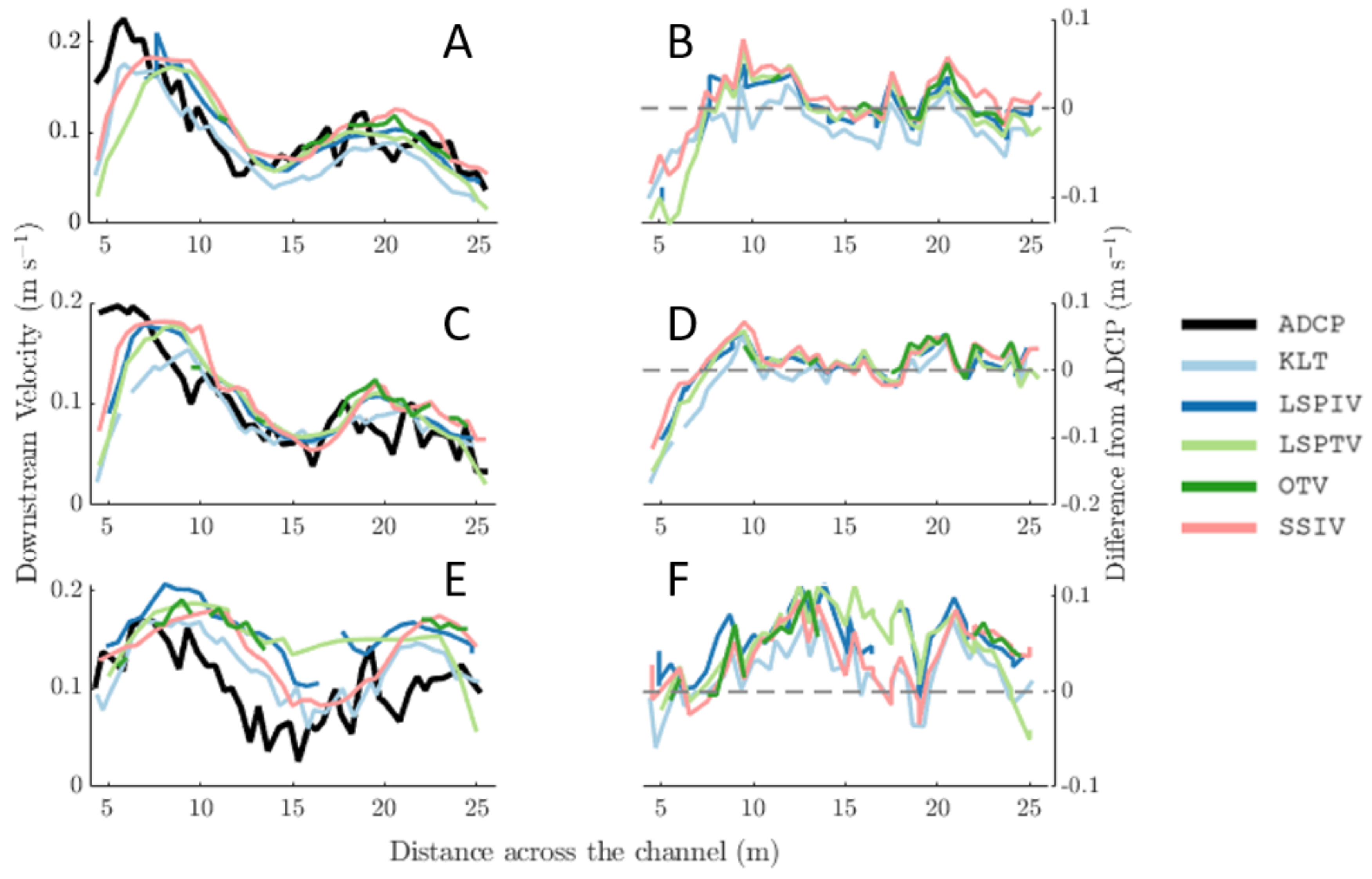
3.3. Comparisons against ADCP Measurements
4. Discussion
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Le Boursicaud, R.; Pénard, L.; Hauet, A.; Thollet, F.; Le Coz, J. Gauging extreme floods on YouTube: Application of LSPIV to home movies for the post-event determination of stream discharges. Hydrol. Process. 2016, 30, 90–105. [Google Scholar] [CrossRef]
- Boiten, W.; Boiten, W. Hydrometry: IHE Delft Lecture Note Series; CRC Press: Boca Raton, FL, USA, 2008. [Google Scholar]
- WMO. Manual on Stream Gauging, Volume II–Computation of Discharge; WMO: Geneva, Switzerland, 2010. [Google Scholar]
- Costa, J.E.; Spicer, K.R.; Cheng, R.T.; Haeni, F.P.; Melcher, N.B.; Thurman, E.M.; Plant, W.J.; Keller, W.C. Measuring stream discharge by non-contact methods: A proof-of-concept experiment. Geophys. Res. Lett. 2000, 27, 553–556. [Google Scholar] [CrossRef]
- Le Coz, J.; Hauet, A.; Pierrefeu, G.; Dramais, G.; Camenen, B. Performance of image-based velocimetry (LSPIV) applied to flash-flood discharge measurements in Mediterranean rivers. J. Hydrol. 2010, 394, 42–52. [Google Scholar] [CrossRef]
- Smith, J.; Bérubé, F.; Bergeron, N. A field application of particle image velocimetry (PIV) for the measurement of surface flow velocities in aquatic habitat studies. In Proceedings of the 26th Canadian Symposium on Remote Sensing, Wolfville, NS, Canada, 14–16 June 2005. [Google Scholar]
- Muste, M.; Hauet, A.; Fujita, I.; Legout, C.; Ho, H.C. Capabilities of large-scale particle image velocimetry to characterize shallow free-surface flows. Adv. Water Resour. 2014, 70, 160–171. [Google Scholar] [CrossRef]
- Meselhe, E.; Peeva, T.; Muste, M. Large scale particle image velocimetry for low velocity and shallow water flows. J. Hydraul. Eng. 2004, 130, 937–940. [Google Scholar] [CrossRef]
- Fujita, I.; Muste, M.; Kruger, A. Large-scale particle image velocimetry for flow analysis in hydraulic engineering applications. J. Hydraul. Res. 1998, 36, 397–414. [Google Scholar] [CrossRef]
- Tauro, F.; Petroselli, A.; Arcangeletti, E. Assessment of drone-based surface flow observations. Hydrol. Process. 2015, 30, 1114–1130. [Google Scholar] [CrossRef]
- Adrian, R.J. Particle-imaging techniques for experimental fluid mechanics. Annu. Rev. Fluid Mech. 1991, 23, 261–304. [Google Scholar] [CrossRef]
- Lewis, Q.W.; Rhoads, B.L. Resolving two-dimensional flow structure in rivers using large-scale particle image velocimetry: An example from a stream confluence. Water Resour. Res. 2015, 51, 7977–7994. [Google Scholar] [CrossRef]
- Fujita, I.; Notoya, Y.; Furuta, T. Measurement of Inundating Flow from a Broken Enbankment by Using Video Images Shoot from a Media Helicopter. In Proceedings of the Ninth International Conference on Fluvial Hydraulics, Villeurbanne, France, 5–8 September 2018; Volume 40, p. 06001. [Google Scholar]
- Le Coz, J.; Jodeau, M.; Hauet, A.; Marchand, B.; Le Boursicaud, R. Image-based velocity and discharge measurements in field and laboratory river engineering studies using the free Fudaa-LSPIV software. In Proceedings of the International Conference on Fluvial Hydraulics, RIVER FLOW, Lausanne, Switzerland, 3–5 September 2014; pp. 1961–1967. [Google Scholar]
- Lewis, Q.W.; Lindroth, E.M.; Rhoads, B.L. Integrating unmanned aerial systems and LSPIV for rapid, cost-effective stream gauging. J. Hydrol. 2018, 560, 230–246. [Google Scholar] [CrossRef]
- Dal Sasso, S.; Pizarro, A.; Samela, C.; Mita, L.; Manfreda, S. Exploring the optimal experimental setup for surface flow velocity measurements using PTV. Environ. Monit. Assess. 2018, 190, 460. [Google Scholar] [CrossRef]
- Tauro, F.; Petroselli, A.; Porfiri, M.; Giandomenico, L.; Bernardi, G.; Mele, F.; Spina, D.; Grimaldi, S. A novel permanent gauge-cam station for surface-flow observations on the Tiber River. Geosci. Instrum. Methods Data Syst. 2016, 5, 241–251. [Google Scholar] [CrossRef]
- Leitão, J.P.; Peña-Haro, S.; Lüthi, B.; Scheidegger, A.; de Vitry, M.M. Urban overland runoff velocity measurement with consumer-grade surveillance cameras and surface structure image velocimetry. J. Hydrol. 2018, 565, 791–804. [Google Scholar] [CrossRef]
- Tauro, F.; Tosi, F.; Mattoccia, S.; Toth, E.; Piscopia, R.; Grimaldi, S. Optical tracking velocimetry (OTV): Leveraging optical flow and trajectory-based filtering for surface streamflow observations. Remote Sens. 2018, 10, 2010. [Google Scholar] [CrossRef]
- Perks, M.T.; Russell, A.J.; Large, A.R.G. Technical Note: Advances in flash flood monitoring using unmanned aerial vehicles (UAVs). Hydrol. Earth Syst. Sci. 2016, 20, 4005–4015. [Google Scholar] [CrossRef]
- Tsubaki, R.; Fujita, I.; Tsutsumi, S. Measurement of the flood discharge of a small-sized river using an existing digital video recording system. J. Hydro-Environ. Res. 2011, 5, 313–321. [Google Scholar] [CrossRef]
- Kim, Y.; Muste, M.; Hauet, A.; Krajewski, W.F.; Kruger, A.; Bradley, A. Stream discharge using mobile large-scale particle image velocimetry: A proof of concept. Water Resour. Res. 2008, 44. [Google Scholar] [CrossRef]
- Eltner, A.; Sardemann, H.; Grundmann, J. Flow velocity and discharge measurement in rivers using terrestrial and UAV imagery. Hydrol. Earth Syst. Sci. Discuss. 2019, 2019. [Google Scholar] [CrossRef]
- Thielicke, W.; Stamhuis, E. PIVlab—Towards user-friendly, affordable and accurate digital particle image velocimetry in MATLAB. J. Open Res. Softw. 2014, 2. [Google Scholar] [CrossRef]
- Tauro, F.; Petroselli, A.; Grimaldi, S. Optical sensing for stream flow observations: A review. J. Agric. Eng. 2018, 49, 199–206. [Google Scholar] [CrossRef]
- Tauro, F.; Porfiri, M.; Grimaldi, S. Orienting the camera and firing lasers to enhance large scale particle image velocimetry for streamflow monitoring. Water Resour. Res. 2014, 50, 7470–7483. [Google Scholar] [CrossRef]
- Muste, M.; Fujita, I.; Hauet, A. Large-scale particle image velocimetry for measurements in riverine environments. Water Resour. Res. 2008, 44. [Google Scholar] [CrossRef]
- Sutarto, T.E. Application of large scale particle image velocimetry (LSPIV) to identify flow pattern in a channel. Procedia Eng. 2015, 125, 213–219. [Google Scholar] [CrossRef]
- Weitbrecht, V.; Kühn, G.; Jirka, G. Large scale PIV-measurements at the surface of shallow water flows. Flow Meas. Instrum. 2002, 13, 237–245. [Google Scholar] [CrossRef]
- Sontek. River Survey or S5/M9—Discharge, Bathymetry and Current Profiling (brochure); Sontek: San Diego, CA, USA, 2015. [Google Scholar]
- Morlock, S.E. Evaluation of acoustic Doppler current profiler measurements of river discharge. Water-Resour. Investig. Rep. 1996, 95, 4218. [Google Scholar]
- Mueller, D.S.; Wagner, C.R.; Rehmel, M.S.; Oberg, K.A.; Rainville, F. Measuring Discharge with Acoustic Doppler Current Profilers from a Moving Boat; US Department of the Interior: Washington, DC, USA; US Geological Survey (EUA): Reston, VA, USA, 2009.
- Blachard, S.F. Office of Surface Water Technical Memorandum 2005.05: Guidance on the Use of RD Instruments StreamPro Acoustic Doppler Profiler; Technical Report; U.S. Geological Survey: Reston, VA, USA, 2005.
- Wolf, P.R.; Ghilani, C. Survey Measurement Adjustments by Least Squares. In The Surveying Handbook; Springer: Boston, MA, USA, 1995; pp. 383–413. [Google Scholar] [CrossRef]
- Tauro, F.; Piscopia, R.; Grimaldi, S. Streamflow observations from cameras: Large-scale particle image velocimetry or particle tracking velocimetry? Water Resour. Res. 2017, 53, 10374–10394. [Google Scholar] [CrossRef]
- Gartner, J.W. Estimating suspended solids concentrations from backscatter intensity measured by acoustic Doppler current profiler in San Francisco Bay, California. Mar. Geol. 2004, 211, 169–187. [Google Scholar] [CrossRef]
- Manfreda, S.; McCabe, M.F.; Miller, P.E.; Lucas, R.; Pajuelo Madrigal, V.; Mallinis, G.; Ben Dor, E.; Helman, D.; Estes, L.; Ciraolo, G.; et al. On the use of unmanned aerial systems for environmental monitoring. Remote Sens. 2018, 10, 641. [Google Scholar] [CrossRef]
- Woodget, A.; Carbonneau, P.; Visser, F.; Maddock, I.P. Quantifying submerged fluvial topography using hyperspatial resolution UAS imagery and structure from motion photogrammetry. Earth Surf. Process. Landf. 2015, 40, 47–64. [Google Scholar] [CrossRef]
- Woodget, A.; Fyffe, C.; Carbonneau, P. From manned to unmanned aircraft: Adapting airborne particle size mapping methodologies to the characteristics of sUAS and SfM. Earth Surf. Process. Landf. 2018, 43, 857–870. [Google Scholar] [CrossRef]
- Marteau, B.; Vericat, D.; Gibbins, C.; Batalla, R.J.; Green, D.R. Application of Structure-from-Motion photogrammetry to river restoration. Earth Surf. Process. Landf. 2017, 42, 503–515. [Google Scholar] [CrossRef]
- Langhammer, J.; Vacková, T. Detection and mapping of the geomorphic effects of flooding using UAV photogrammetry. Pure Appl. Geophys. 2018, 175, 3223–3245. [Google Scholar] [CrossRef]
- Detert, M.; Weitbrecht, V. A low-cost airborne velocimetry system: Proof of concept. J. Hydraul. Res. 2015, 53, 532–539. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Image Velocimetry Algorithm | Brief Overview of Technique | Requirements | Advantages |
|---|---|---|---|
| Kanade–Lucas Tomasi Image Velocimetry (KLT-IV) Processed using KLT-IV developed by Matthew Perks [20] | KLT uses spatial intensity information to detect and search for the position that yields the best match. The KLT-IV process begins with the creation of a camera model, using the cameras internal parameters and Ground Control Points (GCPs). The KLT algorithm is then applied to detect the movement of GCPs within the field of view and images are stabilized using this information. Once images are stabilized, the KLT algorithm is applied to the water surface, and surface features are tracked for the calculation of surface flow velocity. (See [20]). | The camera parameters are required for correct creation of a camera model for calibration and orthorectification of imagery. The duration over which individual trajectories are tracked (the extraction rate) and the block size are required. | Works well in conditions where surface features are sparse and works well in unsteady flows. |
| Large-Scale Particle Image Velocimetry (LSPIV) Processed in PIVlab developed by [24] | LSPIV uses a classical cross-correlation algorithm which is applied to pairs of orthorectified (distortion corrected) images, separated by a given time interval. Interrogation areas and search areas are defined by the user, and the most likely displacement of surface patterns is calculated between the interrogation area in frame one and the search area in frame 2. The most likely displacement of visible tracers is determined as the maximum cross-correlation coefficient, and is used for the calculation of instantaneous velocity flow field. (See [5]). | Sufficient seeding density is required across the entire field of view for accurate surface velocity calculations.The interrogation area and search area sizes need to be defined by the user. | Can provide full surface flow velocity maps. LSPIV is the most tested technique and therefore the most adopted to date. |
| Large-Scale Particle Tracking Velocimetry (LSPTV) Processed using PTVlab developed by Antoine Patalano | LSPTV consists of particle identification and tracking. Images are processed to enhance the appearance of particles in the field of view, and the location of the centroid of the particles in frames is recovered. In the tracking phase, the centroid of the detected particles is identified in subsequent images to reconstruct the particle trajectory (See [16]). | The size and shape of the particles must be known. However, LSPTV can work accurately with few particles distributed throughout the field of view.The interrogation area size needs to be defined by the user. | Works well in conditions where surface features are sparse and works well in unsteady flows [25] |
| Optical Tracking Velocimetry (OTV) Processed using OTV algorithm developed by [19] | The OTV approach combines automated feature detection, tracking through the Lucas-Kanade algorithm, and trajectory-based filtering that retain the most realistic trajectories which pertain to objects in the field of view. Features such as corners and junctions are detected through the Fast from Accelerated Segment Test (FAST) algorithm. Such features are then tracked with the pyramidal Lucas-Kanade sparse first-order differential technique. Images are sub-sampled up to four levels with a search window down to 15 × 15 pixels in size. Out of all trajectories, only those which exhibit a minimum length and inclination with respect to the stream cross-section are retained for further processing. The length and angle of the trajectories can be selected by the user. | OTV does not rely on the deployment of tracers in the field of view. The length and angle of the trajectory needs to be defined by the user, as well as the maximum number of trajectories. | Works well in conditions where surface features are sparse, and where flows are unsteady |
| Surface Structure Image Velocimetry (SSIV). Processed using SSIV algorithm developed by photrack (photrack.ch) [18] | SSIV is a development of LSPIV which uses a similar cross-correlation algorithms for the calculation of surface flow. However, SSIV was developed to overcome some of the factors which make LSPIV susceptible to errors. SSIV introduces a filter which mitigates the effects of shadows and glare, as well as the need for a densely seeded flow surface. Furthermore, a camera model is introduced for the orthorectification of imagery and surface velocity calculation (See [18]). | The camera parameters are required for correct creation of a camera model for calibration and orthorectification of imagery.The interrogation area and search area sizes need to be defined by the user. | Can provide full surface flow velocity maps within deteriorated image conditions (shadows or glares on the water surface, as well as in poor light conditions). |
| Algorithm | Configuration 1 | Configuration 2 | Configuration 3 |
|---|---|---|---|
| LSPIV | 32 IA, 16 SA | 64IA, 32 SA | 128 IA, 64 SA |
| LSPTV | 32 IA | 64 IA | 128 IA |
| SSIV | 32 IA | 64 IA | 128 IA |
| KLT | 31 BS | 63 BS | 127 BS |
| OTV | 50 TL | 100 TL | 200 TL |
| 1 fps | 2 fps | 4 fps | 6 fps | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| C1 | C2 | C3 | C1 | C2 | C3 | C1 | C2 | C3 | C1 | C2 | C3 | ||
| KLT | 10 m | 0.250 | 0.227 | 0.243 | 0.140 | 0.119 | 0.147 | 0.117 | 0.123 | 0.138 | 0.389 | 0.392 | 0.384 |
| 20 m | 0.215 | 0.259 | 0.339 | 0.186 | 0.133 | 0.198 | 0.159 | 0.177 | 0.164 | 0.480 | 0.507 | 0.481 | |
| OTV | 10 m | 0.044 | 0.053 | N/A | 0.012 | 0.011 | N/A | 0.042 | 0.03 | N/A | 0.074 | N/A | N/A |
| 20 m | 0.098 | 0.086 | N/A | 0.106 | 0.101 | N/A | 0.03 | 0.05 | N/A | 0.09 | 0.07 | N/A | |
| LSPIV | 10 m | 0.338 | 0.129 | 0.190 | 0.105 | 0.069 | 0.163 | 0.256 | 0.311 | 0.093 | 0.143 | 0.106 | 0.126 |
| 20 m | 0.237 | 0.229 | 0.094 | 0.227 | 0.191 | 0.165 | 0.185 | 0.167 | 0.054 | 0.072 | 0.212 | 0.062 | |
| LSPTV | 10 m | 0.407 | 0.588 | 1.075 | 0.352 | 0.498 | 1.989 | 0.366 | 0.580 | 3.007 | 0.395 | 0.895 | 5.325 |
| 20 m | 0.313 | 0.309 | 1.239 | 0.241 | 0.552 | 1.120 | 0.198 | 0.566 | 2.533 | 0.202 | 0.625 | 1.902 | |
| SSIV | 10 m | 0.315 | 0.267 | 0.247 | 0.144 | 0.082 | 0.210 | 0.206 | 0.107 | 0.131 | 0.313 | 0.380 | 0.483 |
| 20 m | 0.654 | 0.146 | 0.152 | 0.191 | 0.174 | 0.149 | 0.178 | 0.131 | 0.115 | 0.275 | 0.222 | 0.174 | |
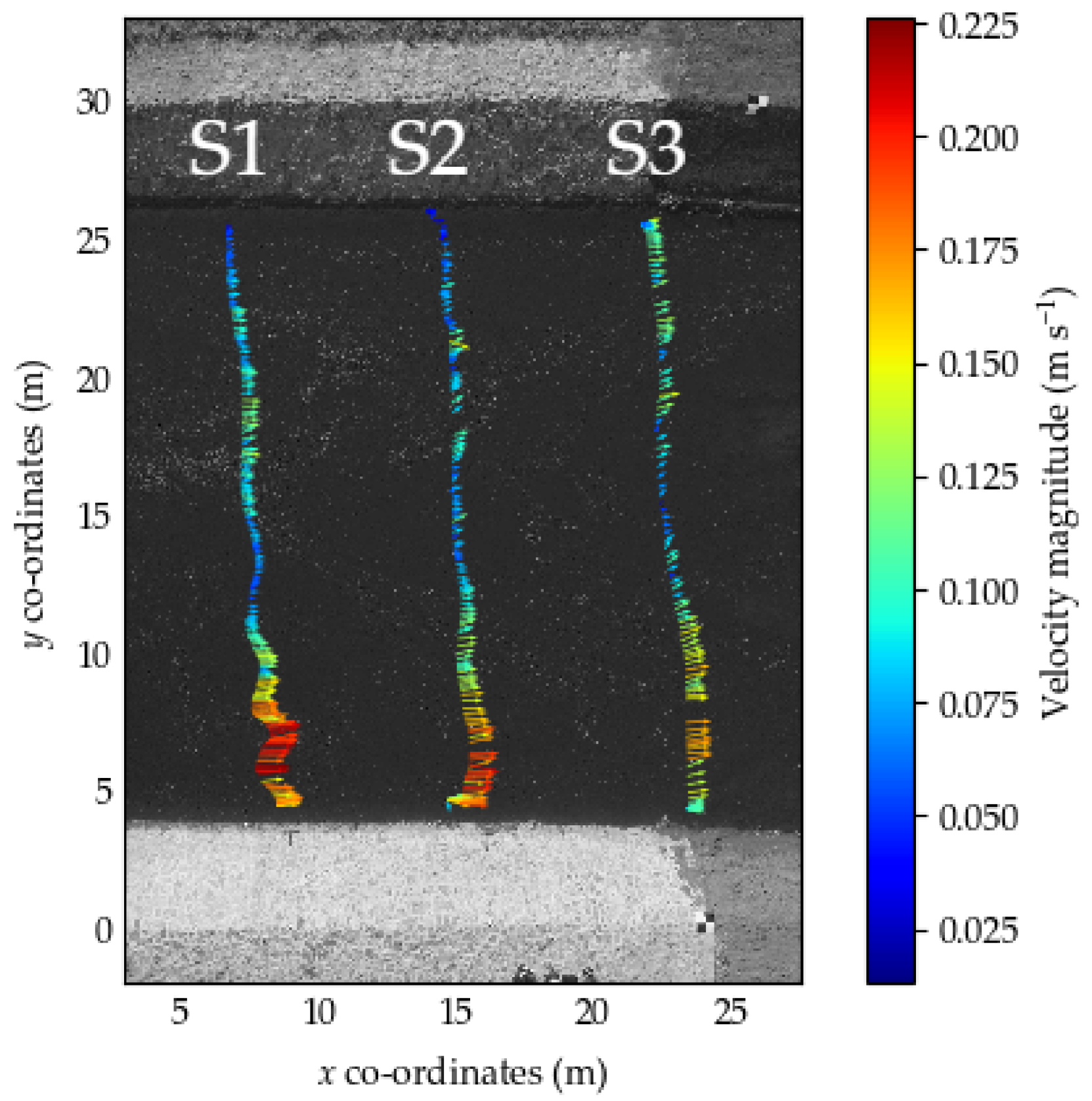
| Algorithm | Cross-Section S1 | Cross-Section S2 | Cross-Section S3 |
|---|---|---|---|
| KLT | 0.535 | 0.1931 | −0.3091 |
| OTV | 0.3592 | 0.2187 | −2.4196 |
| LSPIV | 0.4905 | 0.3005 | −0.4212 |
| LSPTV | 0.1609 | 0.1763 | −0.2517 |
| SSIV | 0.3875 | 0.236 | −0.3805 |
| Algorithm | Cross-Section S1 | Cross-Section S2 | Cross-Section S3 |
|---|---|---|---|
| KLT | 0.4879 | 0.3346 | 0.0593 |
| OTV | −0.3189 | −0.5141 | −2.3445 |
| LSPIV | 0.3373 | 0.4260 | −1.535 |
| LSPTV | 0.1313 | 0.2246 | −1.8127 |
| SSIV | 0.4687 | 0.4104 | −0.7141 |
| Algorithm | Advantages | Limitations/Requirements |
|---|---|---|
| KLT |
|
|
| OTV |
|
|
| LSPIV |
|
|
| LSPTV |
|
|
| SSIV |
|
|
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pearce, S.; Ljubičić, R.; Peña-Haro, S.; Perks, M.; Tauro, F.; Pizarro, A.; Dal Sasso, S.F.; Strelnikova, D.; Grimaldi, S.; Maddock, I.; et al. An Evaluation of Image Velocimetry Techniques under Low Flow Conditions and High Seeding Densities Using Unmanned Aerial Systems. Remote Sens. 2020, 12, 232. https://doi.org/10.3390/rs12020232
Pearce S, Ljubičić R, Peña-Haro S, Perks M, Tauro F, Pizarro A, Dal Sasso SF, Strelnikova D, Grimaldi S, Maddock I, et al. An Evaluation of Image Velocimetry Techniques under Low Flow Conditions and High Seeding Densities Using Unmanned Aerial Systems. Remote Sensing. 2020; 12(2):232. https://doi.org/10.3390/rs12020232
Chicago/Turabian StylePearce, Sophie, Robert Ljubičić, Salvador Peña-Haro, Matthew Perks, Flavia Tauro, Alonso Pizarro, Silvano Fortunato Dal Sasso, Dariia Strelnikova, Salvatore Grimaldi, Ian Maddock, and et al. 2020. "An Evaluation of Image Velocimetry Techniques under Low Flow Conditions and High Seeding Densities Using Unmanned Aerial Systems" Remote Sensing 12, no. 2: 232. https://doi.org/10.3390/rs12020232
APA StylePearce, S., Ljubičić, R., Peña-Haro, S., Perks, M., Tauro, F., Pizarro, A., Dal Sasso, S. F., Strelnikova, D., Grimaldi, S., Maddock, I., Paulus, G., Plavšić, J., Prodanović, D., & Manfreda, S. (2020). An Evaluation of Image Velocimetry Techniques under Low Flow Conditions and High Seeding Densities Using Unmanned Aerial Systems. Remote Sensing, 12(2), 232. https://doi.org/10.3390/rs12020232