Figure 1.
Typical cross-section profile of an MSE wall (modified after [
3]).
Figure 1.
Typical cross-section profile of an MSE wall (modified after [
3]).
Figure 2.
Definition of (a) longitudinal and (b) transversal angular distortions.
Figure 2.
Definition of (a) longitudinal and (b) transversal angular distortions.
Figure 3.
An example of (a) an MSE wall failure that started with (b) an excessive angular deformation (bulging) between neighboring panels.
Figure 3.
An example of (a) an MSE wall failure that started with (b) an excessive angular deformation (bulging) between neighboring panels.
Figure 4.
Two types of MSE walls: (a) Multi-face planar MSE wall and (b) Curved MSE wall with piece-wise planar façade.
Figure 4.
Two types of MSE walls: (a) Multi-face planar MSE wall and (b) Curved MSE wall with piece-wise planar façade.
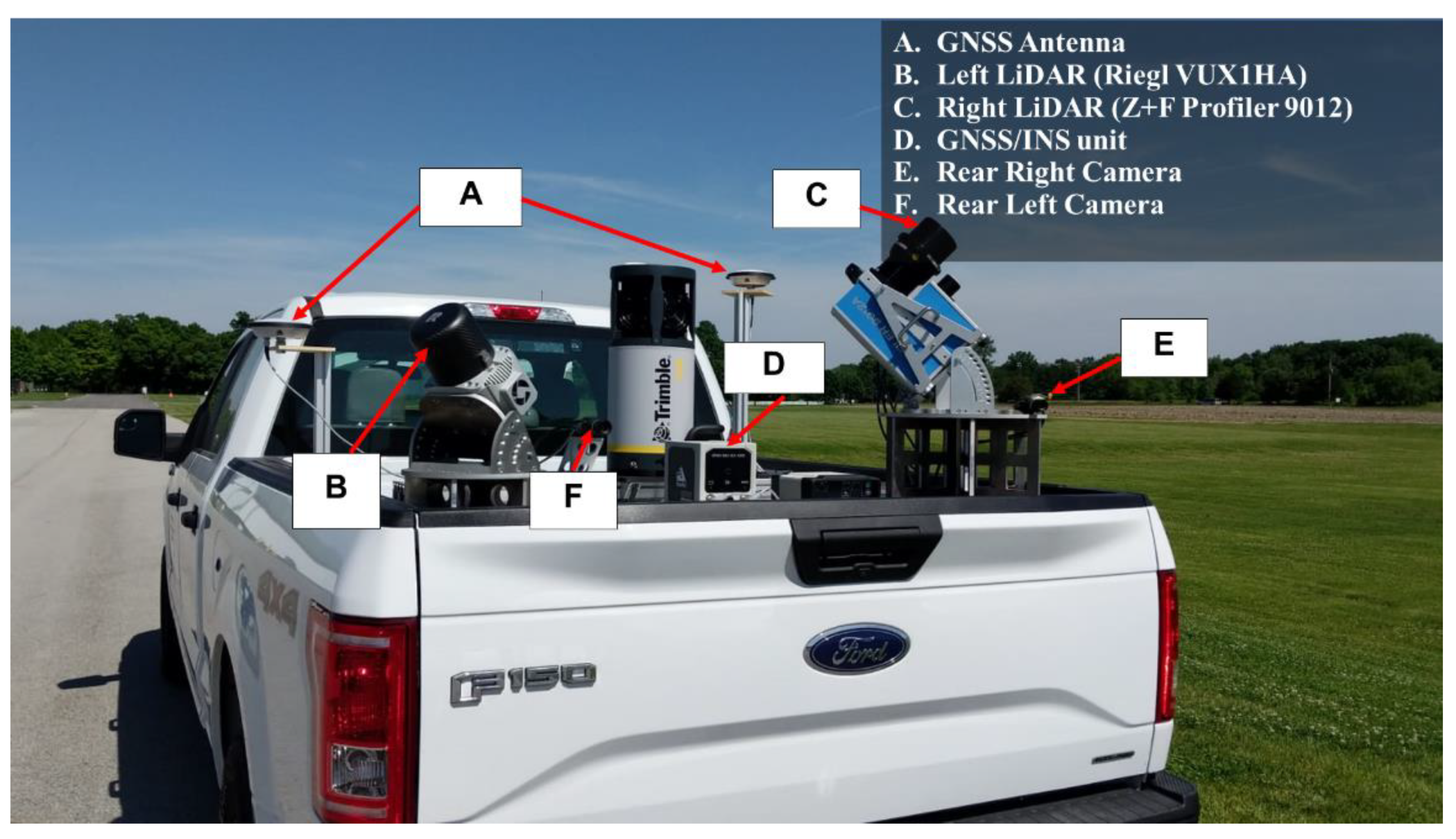
Figure 5.
Configuration of the wheel-based mobile LiDAR mapping system used for the acquisition of point clouds along MSE walls.
Figure 5.
Configuration of the wheel-based mobile LiDAR mapping system used for the acquisition of point clouds along MSE walls.
Figure 6.
Sample photos of the textured MSE walls at different sites (a) Site-1 and (b) Site-2 (the different tiles are highlighted by the red rectangles).
Figure 6.
Sample photos of the textured MSE walls at different sites (a) Site-1 and (b) Site-2 (the different tiles are highlighted by the red rectangles).
Figure 7.
Location and drive-run configuration for the dataset collection at (a) Site-1 and (b) Site-2.
Figure 7.
Location and drive-run configuration for the dataset collection at (a) Site-1 and (b) Site-2.
Figure 8.
MSE wall point clouds collected by the MLS at (a) Site-1 and at (b) Site-2.
Figure 8.
MSE wall point clouds collected by the MLS at (a) Site-1 and at (b) Site-2.
Figure 9.
Flowchart of the proposed methodology.
Figure 9.
Flowchart of the proposed methodology.
Figure 10.
Illustration of the Levelled Face coordinate system () and Panel coordinate system ().
Figure 10.
Illustration of the Levelled Face coordinate system () and Panel coordinate system ().
Figure 11.
(a) Transformation from the source to the reference point cloud, and (b) conditions to accept the point-to-patch correspondence between the two point clouds.
Figure 11.
(a) Transformation from the source to the reference point cloud, and (b) conditions to accept the point-to-patch correspondence between the two point clouds.
Figure 12.
Point cloud registration of TLS dataset at Site-1 (colored by the RGB values from the TLS camera) and the MLS dataset (colored by intensity).
Figure 12.
Point cloud registration of TLS dataset at Site-1 (colored by the RGB values from the TLS camera) and the MLS dataset (colored by intensity).
Figure 13.
An example of manual extraction of the faces along an MSE wall with piece-wise planar façade (different colors along the MSE wall represent the different registered scans).
Figure 13.
An example of manual extraction of the faces along an MSE wall with piece-wise planar façade (different colors along the MSE wall represent the different registered scans).
Figure 14.
Normal distance map for a given face illustrating the fact that joints among the panels could be distinguished through their normal distance from the best fitting plane to that face (units for the values along the scale bar are in meters).
Figure 14.
Normal distance map for a given face illustrating the fact that joints among the panels could be distinguished through their normal distance from the best fitting plane to that face (units for the values along the scale bar are in meters).
Figure 15.
An example of segmented textured MSE wall panels (different colors represent different segmented panels).
Figure 15.
An example of segmented textured MSE wall panels (different colors represent different segmented panels).
Figure 16.
Refined panel coordinate system (Pcs) through the estimated transformation parameters relating the template and matching panels.
Figure 16.
Refined panel coordinate system (Pcs) through the estimated transformation parameters relating the template and matching panels.
Figure 17.
Longitudinal and transversal lines used to define the angular distortions for a planar face of the MSE wall at Site-1.
Figure 17.
Longitudinal and transversal lines used to define the angular distortions for a planar face of the MSE wall at Site-1.
Figure 18.
Illustration of the relationship between and for deriving the panel position and orientation serviceability measures.
Figure 18.
Illustration of the relationship between and for deriving the panel position and orientation serviceability measures.
Figure 19.
Evaluation of panel-to-panel out of-plane displacement.
Figure 19.
Evaluation of panel-to-panel out of-plane displacement.
Figure 20.
Cross sections illustrating the alignment quality of registered Riegl and ZF scans from a given drive run for the MSE wall at Site-1.
Figure 20.
Cross sections illustrating the alignment quality of registered Riegl and ZF scans from a given drive run for the MSE wall at Site-1.
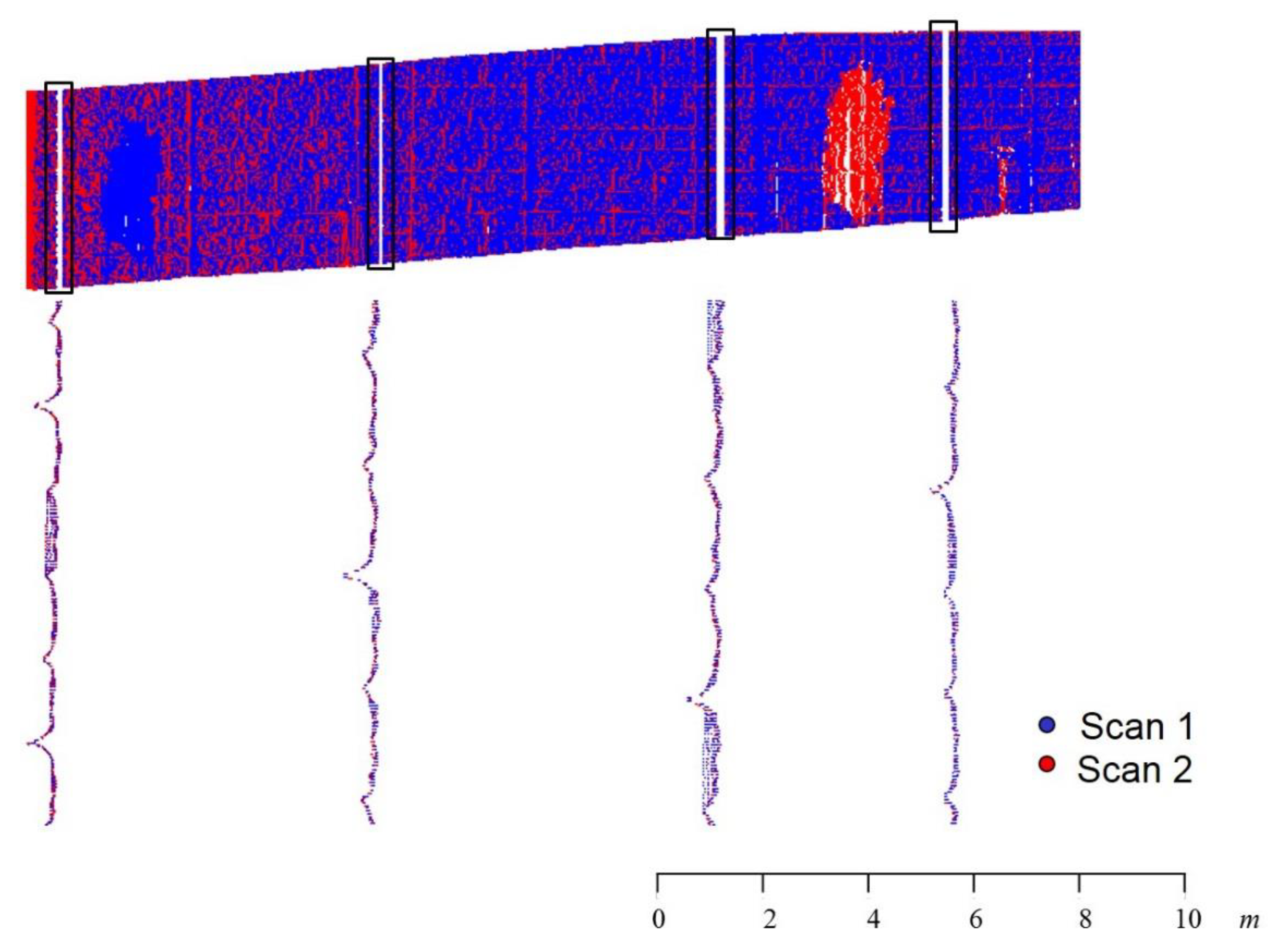
Figure 21.
Cross sections illustrating the alignment quality of registered point clouds from the two MLS drive runs for the MSE wall at Site-1.
Figure 21.
Cross sections illustrating the alignment quality of registered point clouds from the two MLS drive runs for the MSE wall at Site-1.
Figure 22.
Cross sections illustrating the alignment quality of registered TLS scans of the MSE wall at Site-1.
Figure 22.
Cross sections illustrating the alignment quality of registered TLS scans of the MSE wall at Site-1.
Figure 23.
Cross sections illustrating the alignment quality of registered TLS and MLS point clouds for the MSE wall at Site-1.
Figure 23.
Cross sections illustrating the alignment quality of registered TLS and MLS point clouds for the MSE wall at Site-1.
Figure 24.
Angular distortion for the textured MSE wall face at Site-1: (
a) longitudinal angular distortion along lines L1–L5, and (
b) transversal angular distortion along lines T1-T12 (the horizontal lines represent the tolerable angular distortions)—L1–L5 and T1–T12 are illustrated in
Figure 17.
Figure 24.
Angular distortion for the textured MSE wall face at Site-1: (
a) longitudinal angular distortion along lines L1–L5, and (
b) transversal angular distortion along lines T1-T12 (the horizontal lines represent the tolerable angular distortions)—L1–L5 and T1–T12 are illustrated in
Figure 17.
Figure 25.
Cumulative Distribution Functions (CDF) for panel 3D orientation and panel-to-panel displacement using TLS (in blue) and MLS (in red) point clouds at Site-1.
Figure 25.
Cumulative Distribution Functions (CDF) for panel 3D orientation and panel-to-panel displacement using TLS (in blue) and MLS (in red) point clouds at Site-1.
Figure 26.
Cross sections illustrating the alignment quality of the Riegl and ZF point clouds from a given drive run of the MSE wall at Site-2.
Figure 26.
Cross sections illustrating the alignment quality of the Riegl and ZF point clouds from a given drive run of the MSE wall at Site-2.
Figure 27.
Cross sections illustrating the alignment quality of MLS point clouds from two drive runs in the same direction of the MSE wall at Site-2.
Figure 27.
Cross sections illustrating the alignment quality of MLS point clouds from two drive runs in the same direction of the MSE wall at Site-2.
Figure 28.
Longitudinal and transversal lines used for defining angular distortions for one of the faces of the MSE wall at Site-2.
Figure 28.
Longitudinal and transversal lines used for defining angular distortions for one of the faces of the MSE wall at Site-2.
Figure 29.
Angular distortions for one of the faces of the MSE wall at Site-2: (a) longitudinal angular distortion along lines L1-L4, and (b) transversal angular distortion along lines T1-T9 (the horizontal red lines represent the tolerable angular distortions).
Figure 29.
Angular distortions for one of the faces of the MSE wall at Site-2: (a) longitudinal angular distortion along lines L1-L4, and (b) transversal angular distortion along lines T1-T9 (the horizontal red lines represent the tolerable angular distortions).
Figure 30.
Cumulative Distribution Functions (CDF) for the MLS-based panel 3D orientation and panel-to-panel displacement at Site-2.
Figure 30.
Cumulative Distribution Functions (CDF) for the MLS-based panel 3D orientation and panel-to-panel displacement at Site-2.
Table 1.
Tolerable longitudinal angular distortion
values for MSE walls constructed with incremental precast concrete panels (modified from [
6]).
Table 1.
Tolerable longitudinal angular distortion
values for MSE walls constructed with incremental precast concrete panels (modified from [
6]).
| Joint Width wJ | Panel Area ≤ 2.8 m2 (30 ft2) | 2.8 m2 (30 ft2) < Panel Area ≤ 7 m2 (75 ft2) |
|---|
| 19 mm (0.75 inch) | αL,tol = 1/100 = 0.01 | αL,tol = 1/200 = 0.005 |
| 13 mm (0.50 inch) | αL,tol = 1/200 = 0.005 | αL,tol = 1/300 = 0.003 |
| 6 mm (0.25 inch) | αL,tol = 1/300 = 0.003 | αL,tol = 1/600 = 0.002 |
Table 2.
Estimated transformation parameters and quality measures (square root of a-posteriori variance factor, average normal distance among point-patch pairs, and RMSE of the normal distances) following the registration of the Riegl and ZF scans in a given drive run at Site-1.
Table 2.
Estimated transformation parameters and quality measures (square root of a-posteriori variance factor, average normal distance among point-patch pairs, and RMSE of the normal distances) following the registration of the Riegl and ZF scans in a given drive run at Site-1.
| XT (m ± mm) | YT (m ± mm) | ZT (m ± mm) | Ω (deg ± sec) | Φ (deg ± sec) | Κ (deg ± sec) | | Average Normal Dist. (m) | RMSE (m) |
|---|
| 0.020 | 0.010 | 0.005 | −0.0012 | 0.022 | 0.0003 | 0.0024 | 0.0023 | 0.0032 |
| ±0.01 | ±0.03 | ±0.02 | ±0.003 | ±0.029 | ±0.004 |
Table 3.
Estimated transformation parameters and quality measures (square root of a-posteriori variance factor, average normal distance among point-patch pairs, and RMSE of the normal distances) following the registration of the MLS point clouds from different drive runs at Site-1.
Table 3.
Estimated transformation parameters and quality measures (square root of a-posteriori variance factor, average normal distance among point-patch pairs, and RMSE of the normal distances) following the registration of the MLS point clouds from different drive runs at Site-1.
| XT (m ± mm) | YT (m ± mm) | ZT (m ± mm) | Ω (deg ± sec) | Φ (deg ± sec) | Κ (deg ± sec) | | Average Normal Dist. (m) | RMSE (m) |
|---|
| −0.058 | 0.032 | 0.035 | −0.012 | 0.189 | 0.009 | 0.016 | 0.0098 | 0.018 |
| ±1.04 | ±0.270 | ±0.410 | ±0.018 | ±0.120 | ±0.011 |
Table 4.
Estimated transformation parameters and quality measures (square root of a-posteriori variance factor, average normal distance among point-patch pairs, and RMSE of the normal distances) following the registration of the TLS scans at Site-1.
Table 4.
Estimated transformation parameters and quality measures (square root of a-posteriori variance factor, average normal distance among point-patch pairs, and RMSE of the normal distances) following the registration of the TLS scans at Site-1.
| XT (m ± mm) | YT (m ± mm) | ZT (m ± mm) | Ω (deg ± sec) | Φ (deg ± sec) | Κ (deg ± sec) | | Average Normal Dist. (m) | RMSE (m) |
|---|
| −0.817 | 13.11 | −0.722 | 0.04 | 0.01 | 1.06 | 0.003 | 0.0048 | 0.005 |
| ±2.91 | ±4.02 | ±1.34 | ±0.418 | ±0.302 | ±0.220 |
Table 5.
Estimated transformation parameters and quality measures (square root of a-posteriori variance factor, average normal distance among point-patch pairs, and RMSE of the normal distances) following the registration of the MLS and TLS point clouds at Site-1.
Table 5.
Estimated transformation parameters and quality measures (square root of a-posteriori variance factor, average normal distance among point-patch pairs, and RMSE of the normal distances) following the registration of the MLS and TLS point clouds at Site-1.
| XT (m ± mm) | YT (m ± mm) | ZT (m ± mm) | Ω (deg ± sec) | Φ (deg ± sec) | Κ (deg ± sec) | | Average Normal Dist. (m) | RMSE (m) |
|---|
| 0.641 | 0.431 | −0.181 | −0.066 | 0.341 | 1.67 | 0.010 | 0.0052 | 0.008 |
| ±1.70 | ±0.39 | ±0.70 | ±0.032 | ±0.170 | ±0.018 |
Table 6.
TLS-based and MLS-based panel parametrization for the textured MSE wall at Site-1.
Table 6.
TLS-based and MLS-based panel parametrization for the textured MSE wall at Site-1.
| | TLS-Based Measures | MLS_Based Measures |
|---|
| ID | Xo (m) | Yo (m) | Zo (m) | | | | Xo (m) | Yo (m) | Zo (m) | (deg) | (deg) | (deg) |
|---|
| 1 | 0.08 | −0.38 | 0.06 | 0.00 | 0.00 | −0.38 | 0.05 | −0.35 | 0.00 | 0.00 | 0.00 | −0.33 |
| 2 | 0.13 | −0.38 | 1.55 | 0.01 | −0.89 | −0.21 | 0.11 | −0.34 | 1.50 | −1.92 | −0.83 | 0.13 |
| 3 | 0.10 | 2.65 | −0.32 | 0.46 | −0.80 | −1.11 | 0.08 | 2.66 | −0.02 | 0.67 | −1.36 | −0.94 |
| 4 | 0.12 | 2.61 | 0.81 | 0.02 | −1.06 | −1.26 | 0.08 | 2.64 | 0.76 | 0.20 | −1.19 | −1.43 |
| 5 | 0.14 | 2.62 | 2.32 | −0.64 | 1.06 | −1.04 | 0.11 | 2.65 | 2.27 | −0.43 | 0.67 | −1.08 |
| 6 | 0.16 | 5.61 | 0.03 | 0.62 | −0.43 | −0.57 | 0.13 | 5.63 | −0.02 | 0.62 | −0.51 | −0.58 |
| 7 | 0.18 | 5.61 | 1.53 | 0.54 | −0.42 | −0.76 | 0.16 | 5.63 | 1.48 | 0.50 | −0.61 | −0.70 |
| 8 | 0.23 | 5.61 | 3.02 | −0.17 | 2.04 | −0.35 | 0.20 | 5.64 | 2.98 | 0.01 | 1.12 | −0.36 |
| 9 | 0.21 | 8.41 | 0.15 | 0.09 | −3.78 | −0.79 | 0.19 | 8.60 | −0.06 | 0.86 | −1.67 | −0.54 |
| 10 | 0.20 | 8.57 | 0.78 | 0.17 | −0.02 | −0.87 | 0.18 | 8.62 | 0.73 | 0.28 | −0.11 | −0.79 |
| 11 | 0.25 | 8.58 | 2.29 | 0.10 | −1.06 | −0.60 | 0.23 | 8.63 | 2.24 | 0.41 | −1.25 | −0.55 |
| 12 | 0.25 | 11.58 | 0.40 | 0.34 | −0.88 | −0.42 | 0.22 | 11.62 | 0.36 | −0.24 | −0.61 | −0.27 |
| 13 | 0.27 | 11.57 | 1.52 | 0.21 | −0.43 | −0.08 | 0.24 | 11.60 | 1.47 | 0.10 | −0.52 | −0.11 |
| 14 | 0.30 | 11.58 | 3.02 | 0.34 | −1.05 | −0.07 | 0.28 | 11.61 | 2.98 | −0.31 | −1.14 | 0.05 |
| 15 | 0.27 | 14.56 | 0.77 | 0.46 | −0.62 | 0.05 | 0.25 | 14.61 | 0.73 | 0.62 | −0.89 | 0.25 |
| 16 | 0.29 | 14.56 | 2.28 | 0.37 | −1.24 | −0.06 | 0.27 | 14.61 | 2.23 | 0.66 | −1.35 | 0.12 |
| 17 | 0.29 | 14.58 | 3.77 | 0.30 | 0.00 | 0.01 | 0.28 | 14.63 | 3.74 | −1.84 | −1.00 | 0.09 |
| 18 | 0.28 | 17.56 | 0.76 | 0.92 | −1.44 | 0.21 | 0.25 | 17.62 | 1.01 | −0.24 | 0.20 | 0.28 |
| 19 | 0.28 | 17.56 | 1.54 | 0.24 | −0.59 | −0.08 | 0.25 | 17.62 | 1.50 | 0.28 | −0.79 | −0.07 |
| 20 | 0.30 | 17.56 | 3.04 | 0.30 | −1.19 | −0.06 | 0.28 | 17.61 | 2.99 | 0.57 | −1.54 | −0.01 |
| 21 | 0.27 | 20.55 | 1.11 | 1.54 | −0.42 | 0.30 | 0.24 | 20.55 | 1.10 | −1.73 | −0.33 | 0.30 |
| 22 | 0.30 | 20.55 | 2.28 | 0.01 | −0.71 | 0.26 | 0.27 | 20.59 | 2.24 | −0.15 | −0.91 | 0.28 |
| 23 | 0.31 | 20.55 | 3.78 | −0.65 | −1.68 | 0.10 | 0.29 | 20.60 | 3.73 | −0.28 | −2.04 | 0.21 |
| 24 | 0.28 | 23.55 | 1.53 | 0.37 | −1.41 | −0.06 | 0.25 | 23.58 | 1.48 | −0.01 | −1.51 | 0.10 |
| 25 | 0.28 | 23.55 | 3.02 | 0.48 | −1.11 | −0.20 | 0.26 | 23.60 | 2.98 | 0.52 | −1.27 | −0.05 |
| 26 | 0.25 | 26.51 | 1.52 | 0.37 | −0.44 | 0.48 | 0.22 | 26.53 | 1.49 | −0.51 | −0.80 | 0.51 |
| 27 | 0.27 | 26.53 | 2.28 | 0.32 | −0.81 | 0.63 | 0.25 | 26.58 | 2.24 | 0.19 | −1.03 | 0.83 |
| 28 | 0.29 | 26.54 | 3.77 | 0.49 | 0.15 | 0.61 | 0.27 | 26.59 | 3.71 | 0.09 | −0.11 | 0.73 |
| 29 | 0.22 | 29.67 | 1.90 | 0.28 | 0.01 | 0.13 | 0.20 | 29.58 | 1.86 | 0.41 | −0.47 | 0.28 |
| 30 | 0.26 | 29.53 | 3.04 | 0.28 | −0.66 | 0.45 | 0.23 | 29.57 | 3.03 | −0.46 | −0.71 | 0.47 |
| 31 | 0.23 | 32.52 | 2.29 | 0.37 | −0.86 | 1.23 | 0.21 | 32.56 | 2.24 | 0.15 | −1.09 | 1.27 |
| 32 | 0.26 | 32.52 | 3.78 | 0.54 | −0.63 | 1.41 | 0.23 | 32.56 | 3.73 | −0.56 | −0.75 | 1.44 |
Table 7.
TLS-based and MLS-based summary statistics of the derived serviceability measures for the MSE wall at Site-1.
Table 7.
TLS-based and MLS-based summary statistics of the derived serviceability measures for the MSE wall at Site-1.
| | TLS | MLS |
|---|
| | | | | Panel-to-Panel Displacement (mm) | | | | Panel-to-Panel Displacement (mm) |
|---|
| Sample Size | 32 | 32 | 32 | 167 | 32 | 32 | 32 | 169 |
| Minimum Value | −0.65 | −3.78 | −1.26 | −24.50 | −0.84 | −2.04 | −1.43 | −29.00 |
| Maximum Value | 1.54 | 2.04 | 1.41 | 23.10 | 0.86 | 1.12 | 1.44 | 32.50 |
| Range | 1.26 | 1.83 | 1.74 | 47.60 | 1.39 | 1.87 | 1.91 | 61.50 |
| Average | 0.28 | −0.67 | −0.10 | −0.01 | 0.06 | −0.77 | −0.02 | 0.39 |
| Standard Deviation | 0.39 | 0.92 | 0.62 | 8.28 | 0.46 | 0.67 | 0.63 | 8.59 |
| 5th Percentile | −0.64 | −1.68 | −1.11 | −13.60 | −0.73 | −1.67 | −1.08 | −11.30 |
| 25th Percentile | 0.09 | −1.06 | −0.57 | −5.70 | −0.31 | −1.25 | −0.54 | −5.60 |
| 50th Percentile (median) | 0.30 | −0.71 | −0.07 | 0.20 | 0.09 | −0.89 | 0.04 | 0.10 |
| 75th Percentile | 0.46 | −0.42 | 0.21 | 5.40 | 0.41 | −0.51 | 0.28 | 5.50 |
| 95th Percentile | 0.62 | 0.15 | 0.63 | 11.80 | 0.66 | 0.20 | 0.83 | 13.50 |
| Interquartile Range (IQR) | 0.37 | 0.64 | 0.78 | 11.10 | 0.71 | 0.74 | 0.82 | 11.10 |
Table 8.
RMSE of the differences between the TLS-based and MLS-based serviceability measures for the MSE wall at Site-1.
Table 8.
RMSE of the differences between the TLS-based and MLS-based serviceability measures for the MSE wall at Site-1.
| | Xo (m) | Yo (m) | Zo (m) | | | (deg) | Panel-to-Panel Displacement (m) |
|---|
| RMSE | 0.02 | 0.05 | 0.06 | 0.39 | 0.55 | 0.11 | 0.0178 |
Table 9.
Estimated transformation parameters and quality measures (square root of a-posteriori variance factor, average normal distance among point-patch pairs, and RMSE of the normal distances) following the registration of the Riegl and ZF point clouds for one of the drive runs at Site-2.
Table 9.
Estimated transformation parameters and quality measures (square root of a-posteriori variance factor, average normal distance among point-patch pairs, and RMSE of the normal distances) following the registration of the Riegl and ZF point clouds for one of the drive runs at Site-2.
| XT (m ± mm) | YT (m ± mm) | ZT (m ± mm) | Ω (deg ± sec) | Φ (deg ± sec) | Κ (deg ± sec) | | Average Normal Dist. (m) | RMSE (m) |
|---|
| 0.011 | 0.019 | 0.014 | −0.04 | 0.13 | −0.008 | 0.0045 | 0.0033 | 0.0062 |
| ±0.02 | ±0.04 | ±0.03 | ±0.011 | ±0.029 | ±0.004 |
Table 10.
Estimated transformation parameters and quality measures (square root of a-posteriori variance factor, average normal distance among point-patch pairs, and RMSE of the normal distances) following the registration of the MLS point clouds from two drive runs of the MSE wall at Site-2.
Table 10.
Estimated transformation parameters and quality measures (square root of a-posteriori variance factor, average normal distance among point-patch pairs, and RMSE of the normal distances) following the registration of the MLS point clouds from two drive runs of the MSE wall at Site-2.
| XT (m ± mm) | YT (m ± mm) | ZT (m ± mm) | Ω (deg ± sec) | Φ (deg ± sec) | Κ (deg ± sec) | | Average Normal Dist. (m) | RMSE (m) |
|---|
| −0.065 | −0.009 | −0.037 | −0.011 | −0.028 | 0.009 | 0.0039 | 0.003 | 0.0043 |
| ±0.01 | ±0.02 | ±0.02 | ±0.007 | ±0.014 | ±0.00 |
Table 11.
MLS-based panel parametrization for one of the MSE wall faces at Site-2.
Table 11.
MLS-based panel parametrization for one of the MSE wall faces at Site-2.
| ID | Xo (m) | Yo (m) | Zo (m) | | | (deg) |
|---|
| 1 | 0.02 | 0.06 | 0.13 | 0.00 | 0.00 | 0.96 |
| 2 | 0.03 | 0.05 | 0.80 | 0.71 | 2.52 | 0.92 |
| 3 | 0.08 | 0.05 | 2.34 | −0.12 | 2.01 | 1.12 |
| 4 | 0.12 | 0.00 | 3.87 | −1.11 | 3.45 | 1.15 |
| 5 | −0.02 | 3.05 | 0.09 | −0.15 | 1.80 | 0.29 |
| 6 | 0.00 | 3.06 | 1.54 | 0.88 | 2.62 | 0.24 |
| 7 | 0.05 | 3.05 | 3.11 | −0.29 | 1.45 | 0.20 |
| 8 | −0.04 | 6.05 | 0.12 | −0.26 | 0.67 | 0.58 |
| 9 | −0.03 | 6.03 | 0.81 | 0.03 | 2.81 | 0.48 |
| 10 | 0.02 | 6.04 | 2.35 | −0.08 | 2.79 | 0.30 |
| 11 | 0.06 | 6.02 | 3.82 | −0.48 | 1.02 | 0.30 |
| 12 | −0.05 | 9.16 | 0.51 | −0.33 | 1.31 | −0.04 |
| 13 | −0.03 | 9.03 | 1.53 | 1.02 | 3.25 | −0.31 |
| 14 | 0.05 | 9.05 | 3.09 | −0.54 | 0.97 | 0.19 |
| 15 | −0.04 | 12.03 | 0.35 | 1.61 | −0.55 | −0.27 |
| 16 | −0.04 | 12.05 | 0.84 | −0.23 | 3.06 | −0.29 |
| 17 | 0.02 | 12.02 | 2.38 | −0.66 | 1.88 | −0.15 |
| 18 | 0.04 | 12.04 | 3.89 | −0.22 | 1.76 | 0.14 |
| 19 | −0.03 | 15.03 | 0.54 | 0.99 | 1.74 | 0.15 |
| 20 | 0.01 | 15.03 | 1.61 | −0.28 | 2.40 | 0.34 |
| 21 | 0.04 | 15.05 | 3.16 | −0.30 | 0.28 | 0.46 |
| 22 | −0.04 | 18.03 | 0.80 | 0.45 | 2.13 | −0.24 |
| 23 | 0.00 | 18.05 | 2.38 | 0.71 | 1.52 | −0.03 |
| 24 | 0.02 | 18.02 | 3.82 | 0.33 | 1.09 | 0.05 |
| 25 | −0.03 | 21.02 | 0.73 | 0.60 | 1.07 | −0.63 |
| 26 | −0.02 | 21.03 | 1.55 | 1.27 | 3.07 | −0.99 |
| 27 | 0.03 | 21.01 | 3.09 | −0.94 | 0.60 | −0.91 |
| 28 | 0.03 | 20.96 | 4.64 | −1.93 | 0.83 | −0.32 |
| 29 | 0.01 | 24.03 | 0.85 | −0.66 | 3.14 | −0.24 |
| 30 | 0.07 | 24.02 | 2.35 | −0.52 | 1.07 | −0.23 |
| 31 | 0.06 | 24.00 | 3.83 | −0.26 | 0.09 | −0.17 |
Table 12.
MLS-based summary statistics of the serviceability measures for 285 panels of the MSE wall at Site-2.
Table 12.
MLS-based summary statistics of the serviceability measures for 285 panels of the MSE wall at Site-2.
| | | | | Panel-to-Panel Displacement (mm) |
|---|
| Sample Size | 285 | 285 | 285 | 1538 |
| Minimum Value | −2.95 | −2.09 | −1.72 | −31.40 |
| Maximum Value | 2.85 | 3.61 | 1.81 | 34.90 |
| Range | 5.80 | 5.70 | 3.53 | 66.30 |
| Average | 0.16 | 0.55 | 0.01 | −0.21 |
| Standard Deviation | 0.92 | 1.02 | 0.52 | 9.03 |
| 5th Percentile | −1.10 | −0.87 | −0.86 | −14.70 |
| 25th Percentile | −0.37 | −0.10 | −0.33 | −6.40 |
| 50th Percentile (median) | 0.00 | 0.41 | 0.00 | −0.30 |
| 75th Percentile | 0.73 | 1.12 | 0.34 | 5.90 |
| 95th Percentile | 1.89 | 2.62 | 0.87 | 14.00 |
| Interquartile Range (IQR) | 1.10 | 1.22 | 0.67 | 12.30 |
































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}