The InflateSAR Campaign: Evaluating SAR Identification Capabilities of Distressed Refugee Boats



Abstract
1. Introduction
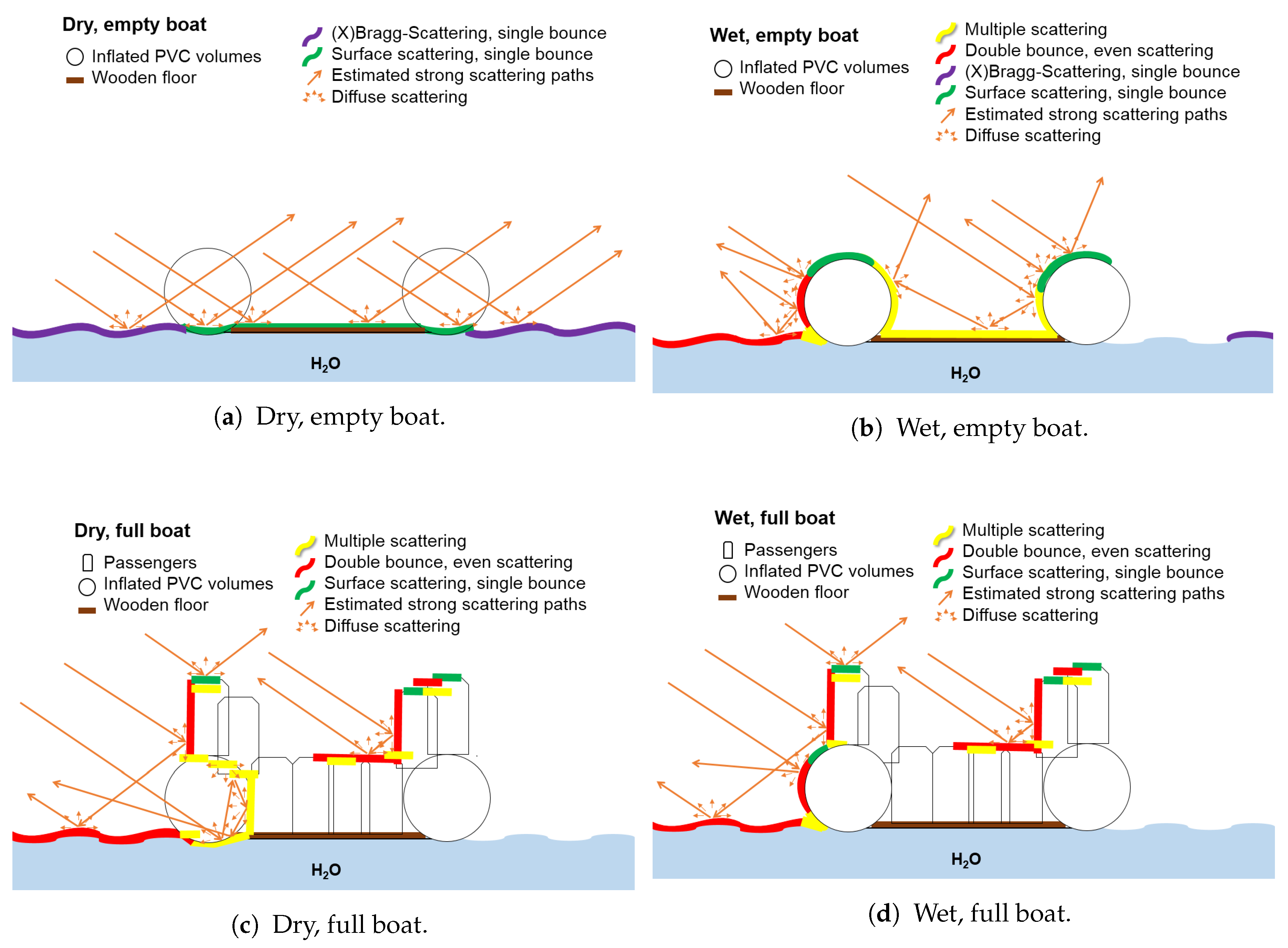
2. A Scattering Model of an Inflatable Refugee Boat
3. Data
3.1. Data Collection Campaign
- The superstructures of said open-top inflatables are shaped by the cargo, in our case the passengers. A boat fully loaded with people is expected to change scattering mechanisms (e.g., modeled as adding volume scattering and multiple reflections). To investigate these influences, four data takes had 30 passengers occupying the vessel.
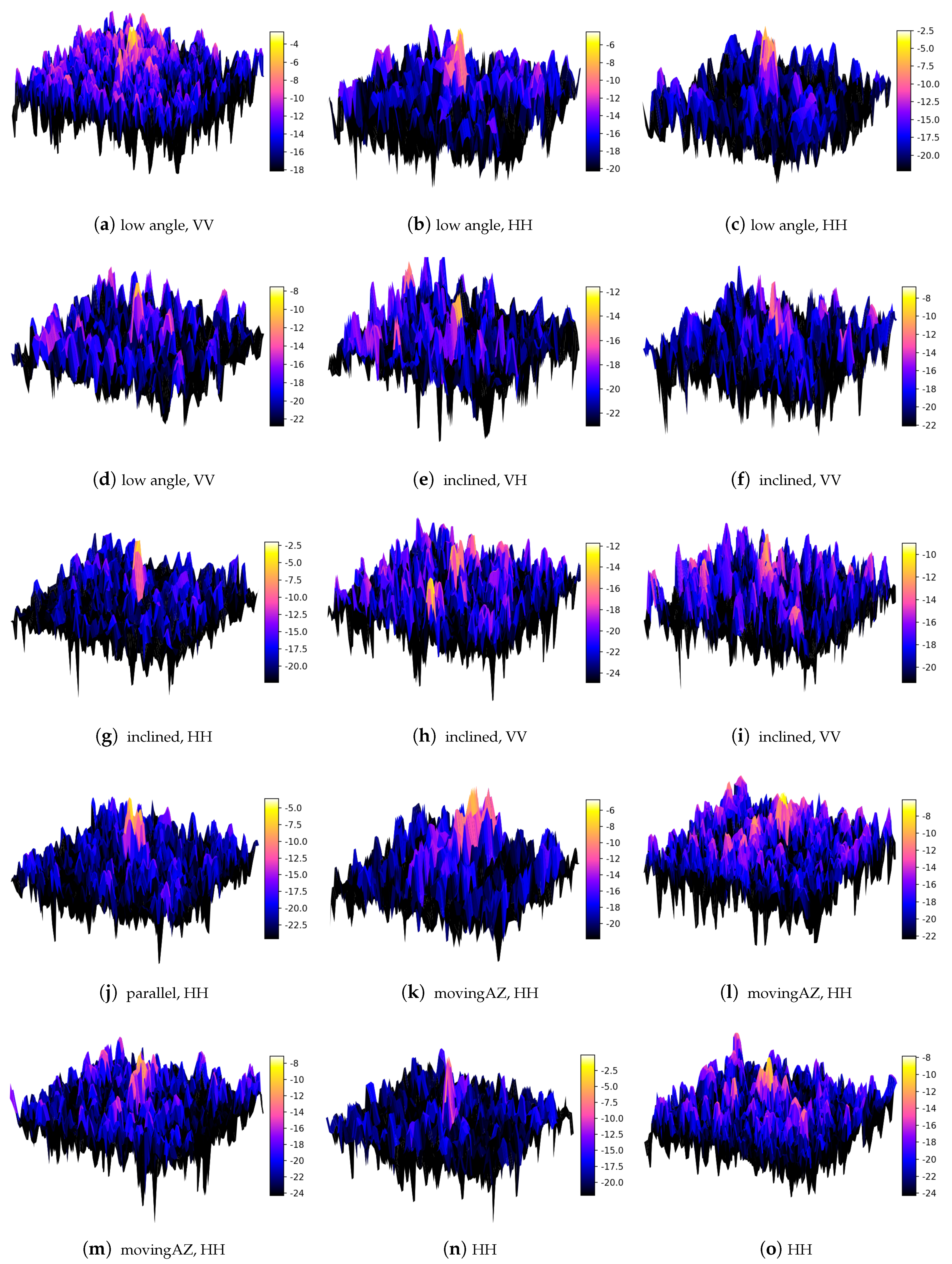
- To test the influence of the inflatable’s orientation compared to the radar wave’s path, the vessel faced different parts toward the sensor: prow or stern side orthogonally (“parallel”), the broadside orthogonally (“orthogonal”) or the broadside at an angle of 45° (“inclined”). This should add to an analysis of the backscattering behavior of specific parts of the boat, such as the outboard engine, double bounce caused by its passengers and double bounce and volume scattering at the broadside or at the prow of the boat. In principle, electromagnetic waves, impinging on the vessel at 45°, are expected to be scattered away, whereas orthogonal or parallel vessel orientation should lead to a situation wherein the backscattering should be higher.
- Two of the experiments include a moving inflatable at its highest possible speed (∼10 km/h), where “movingAZ” has a boat moving in azimuth and “movingR” relates to movement in ground range. Movement is expected to provide the possibility of detecting the position and orientation of its wakes. However, movement involves smearing effects and azimuth displacement which may impede the detection.
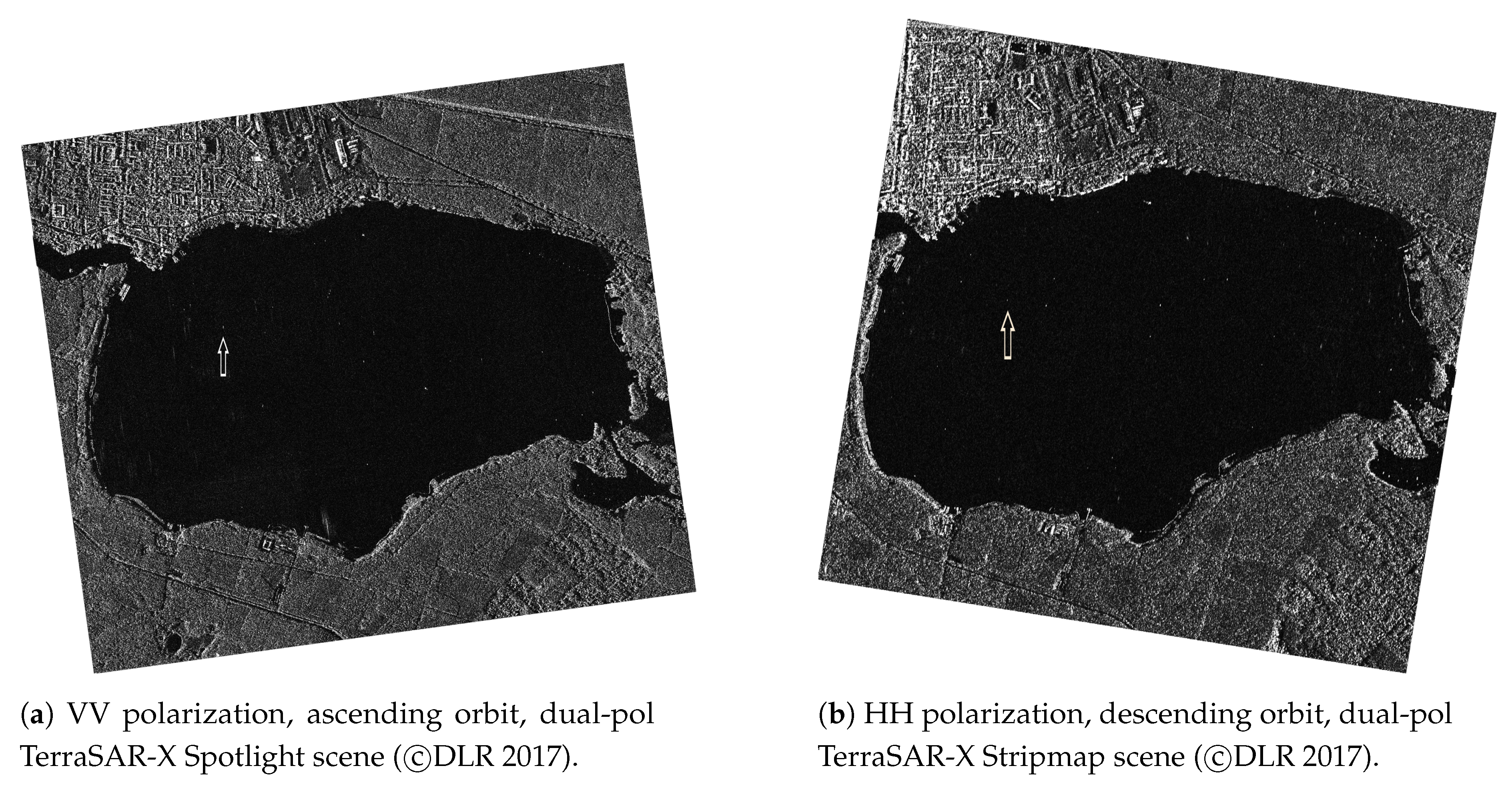
3.2. First Inspection of the Backscattering of Inflatable Boats
4. Methods
4.1. Water Surface Clutter
4.2. Identification Scheme
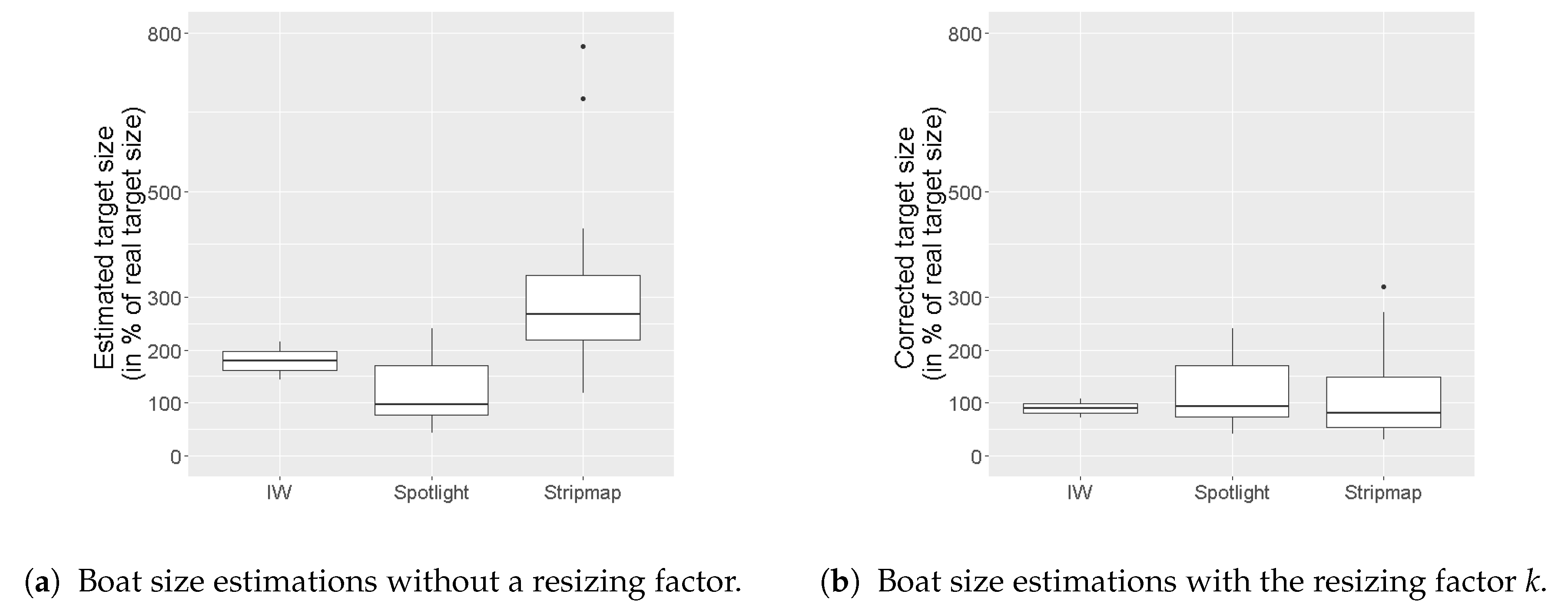
4.3. Estimation of the Inflatable’s Size
5. Results
5.1. Analysis of the Inflatable’s Backscattering
5.2. Assessment of Acquisition Parameters
5.3. Analysis of Clutter Effects
5.4. Polarimetric Analysis
5.5. Emulating the Detectability at Higher Sea States
6. Discussion
7. Conclusions
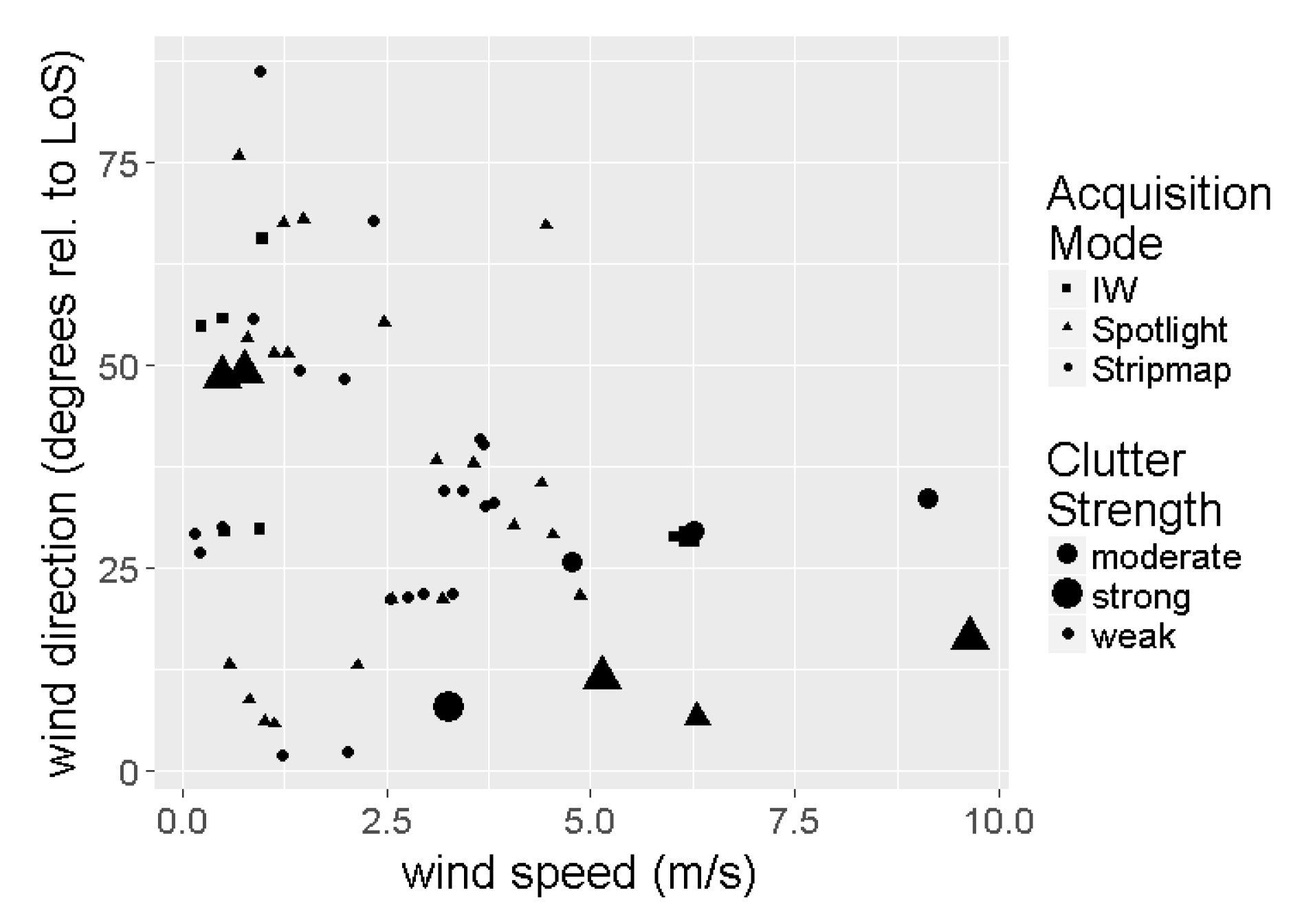
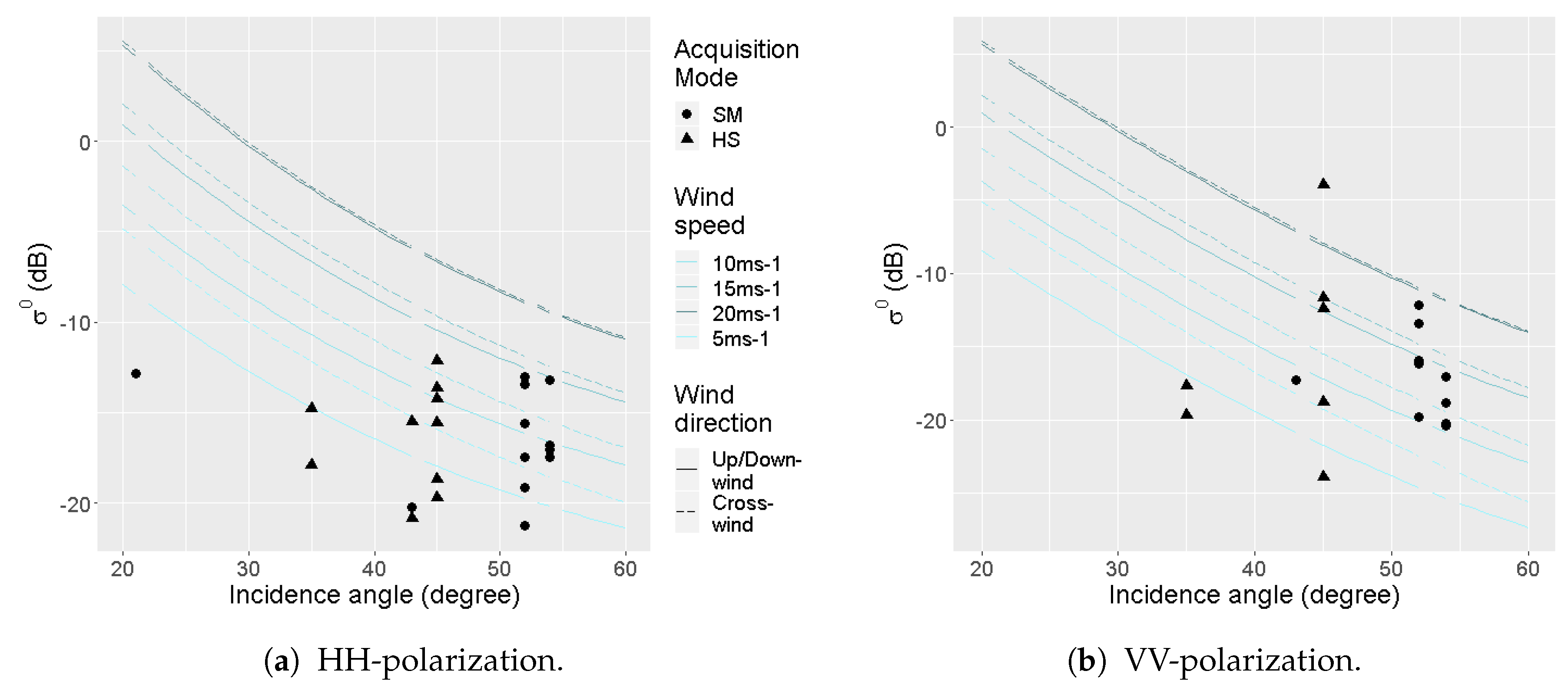
- Higher incidence angles increase the detectability, since the sea has a lower backscattering, whereas the target signal’s intensity remains relatively stable.
- Wind speed greater than 10 ms dramatically reduces the detectability for most cases. That is true for both HH and VV polarizations.
- Above 15 ms, in almost all cases the TCRs get too low to ensure a reliable intensity-based identification.
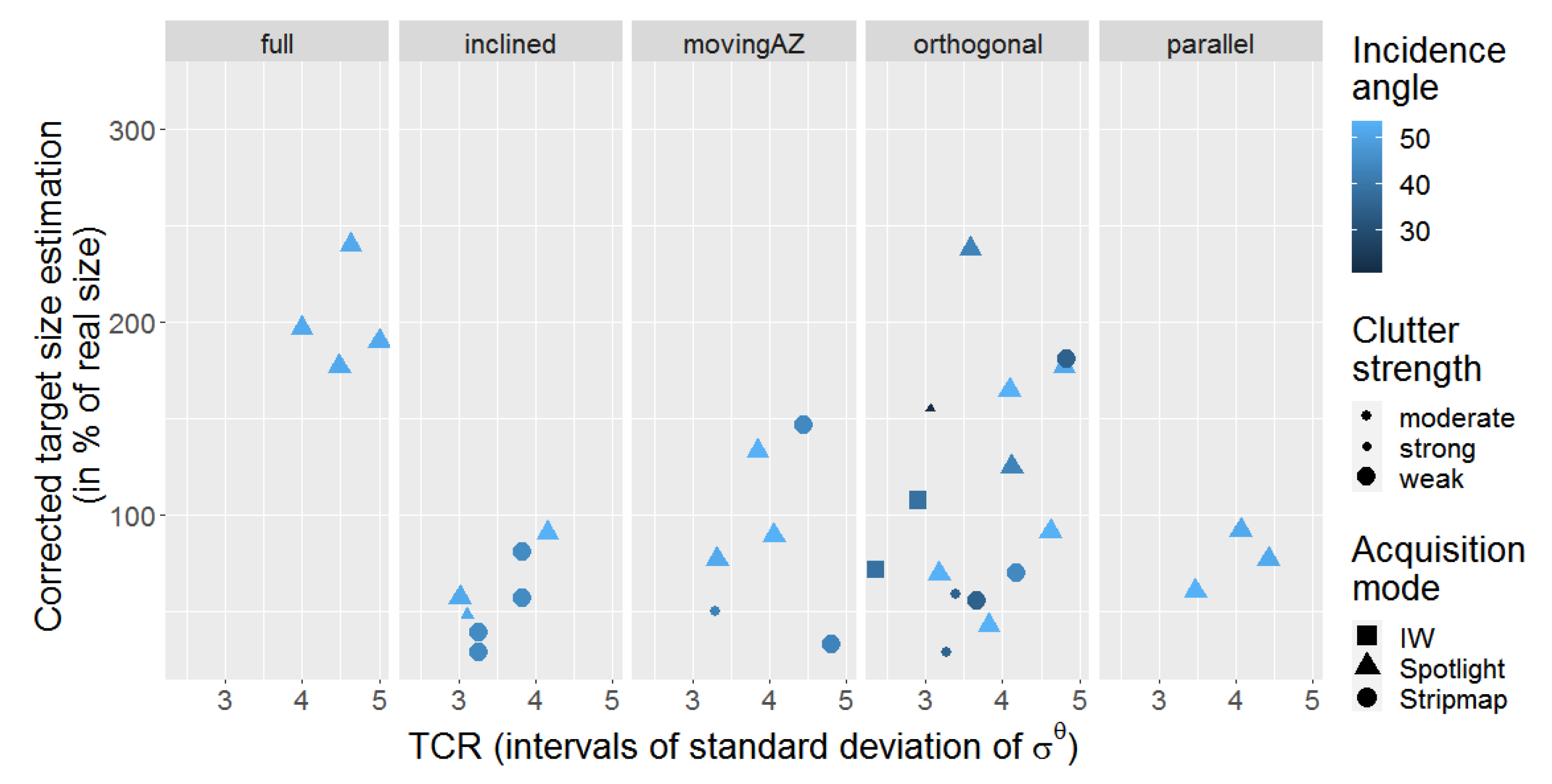
- A full vessel has comparatively larger footprint estimations of around 200% and strong target to clutter ratios between four and five times the standard deviation of 0. This category can be seen as a reference group, since it represents the most realistic situation.
- Movement in azimuth triggers a smaller TCR due to the well-known smearing effect. The consequence is a reduced identification capability. Size estimations are well around the 100% mark.
- Throughout the experiments, inclined and parallel, the size of the vessel was underestimated and the target to clutter ratios had a tendency to be very low.
- The experiments with a stationary vessel orthogonally oriented (“orthogonal”) led to a quite variable identification quality with boat size estimations mainly between 50% and 150% of the real size and acceptable target to clutter ratios, mostly concentrated in between three and four times of the respective image’s standard deviation.
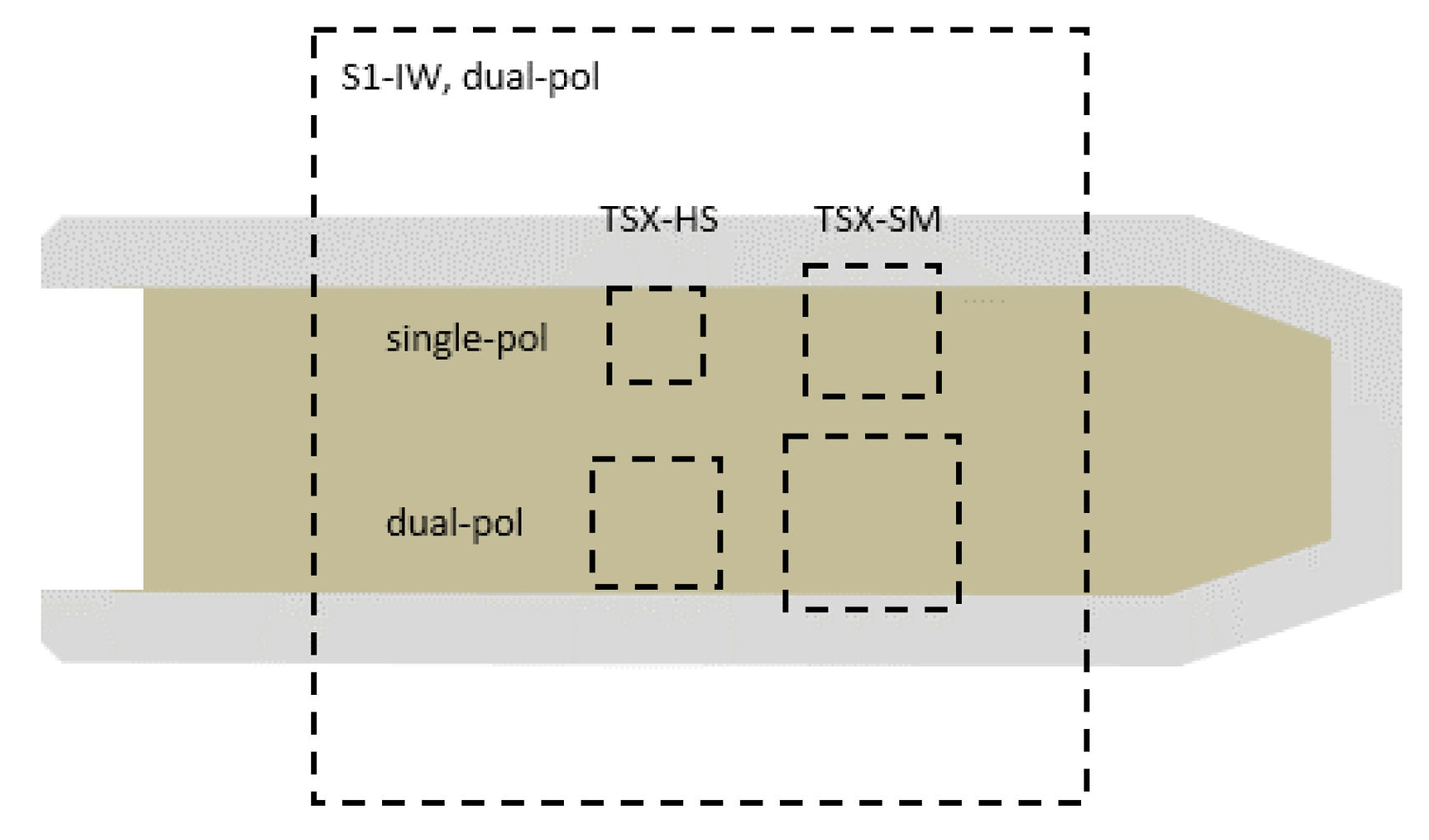
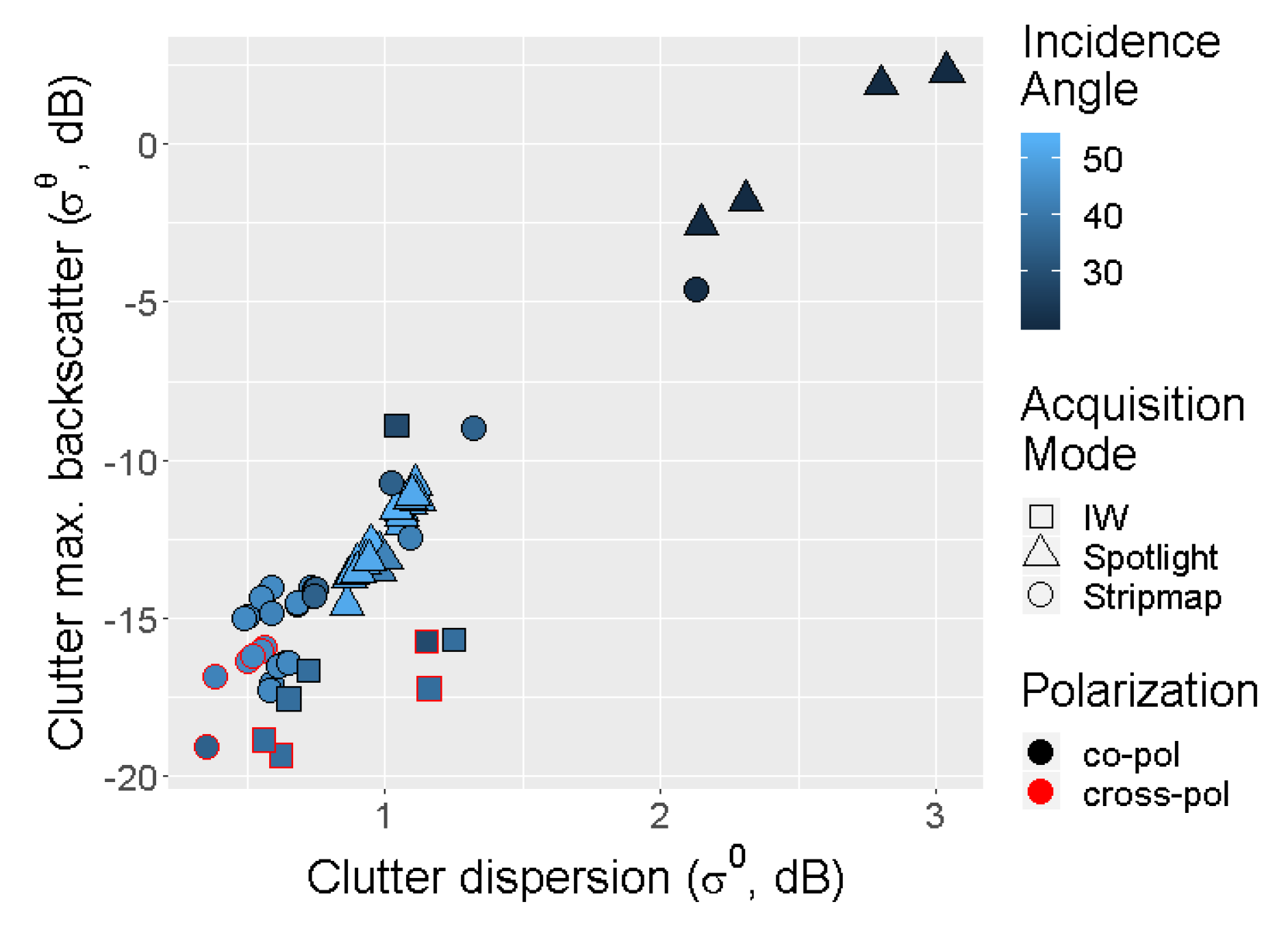
- The acquisition mode played a role with Sentinel-1’s Interferometric Wide Swath mode characterized by very low target to clutter ratios. TerraSAR-X’s Stripmap and Spotlight modes show similar quality of identification throughout. However, this is driven by a combination of many influencing factors and we cannot come to any conclusion without collecting more data.
- The incidence angle does not seem to play a role, but we cannot draw any meaningful conclusions considering the limited availability of low incidence angle data not affected by stronger clutter. However, it clearly is prone to the occurrence of increased clutter, which lowers the TCR due to a stronger radar response from the water’s surface. Chances for automatic identifications for those cases are expected to be lower.
- The majority of corrected boat size estimations are between 50% and 150% of the real vessel size.
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Vachon, P.W. Ship Detection in Synthetic Aperture Radar Imagery. In Proceedings of the OceanSAR 2006—Third Workshop on Coastal and Marine Applications of SAR, St. John’s, NL, Canada, 23–25 October 2006; pp. 1–10. [Google Scholar]
- Crisp, D.J.; Redding, N.J. Ship Detection in Synthetic Aperture Radar Imagery. In Proceedings of the 12th Australasian Remote Sensing and Photogrammetry Conference, Fremantle, Australia, 18–22 October 2004; p. 10. [Google Scholar]
- Hannevik, T.N. Evaluation of Radarsat-2 for Ship Detection. Forsv. Forsk. FFI-Rapp. 2011, 1692. Available online: https://ffi-publikasjoner.archive.knowledgearc.net/handle/20.500.12242/1317 (accessed on 22 October 2020).
- Velotto, D.; Tings, B.; Bentes, C. Comparison of Ship Detectability between TerraSAR-X and Sentinel-1. In Proceedings of the 2017 IEEE 3rd International Forum on IEEEResearch and Technologies for Society and Industry (RTSI), Modena, Italy, 11–13 September 2017; pp. 1–5. [Google Scholar]
- Fernandez Arguedas, V.; Velotto, D.; Tings, B.; Greidanus, H.; Bentes, C. Ship Classification in High and Very High Resolution Satellite SAR Imagery. In Proceedings of the Security Research Conference, 11th Future Security, Berlin, Germany, 4–6 September 2016; pp. 347–354. [Google Scholar]
- Marino, A.; Sanjuan-Ferrer, M.J.; Hajnsek, I.; Ouchi, K. Ship Detection with Spectral Analysis of Synthetic Aperture Radar: A Comparison of New and Well-Known Algorithms. Remote Sens. 2015, 7, 5416–5439. [Google Scholar] [CrossRef]
- Song, S.; Yang, J. Ship Detection in Polarimetric SAR Images via Tensor Robust Principle Component Analysis. In Proceedings of the 2015 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Milan, Italy, 26–31 July 2015; pp. 3152–3155. [Google Scholar] [CrossRef]
- Marino, A.; Hajnsek, I. Statistical Tests for a Ship Detector Based on the Polarimetric Notch Filter. Geosci. Remote Sens. IEEE Trans. 2015, 53, 4578–4595. [Google Scholar] [CrossRef]
- Velotto, D.; Nunziata, F.; Migliaccio, M.; Lehner, S. Dual-Polarimetric Terrasar-x SAR Data for Target at Sea Observation. Geosci. Remote Sens. Lett. IEEE 2013, 10, 1114–1118. [Google Scholar] [CrossRef]
- Sanjuan-Ferrer, M.J.; Hajnsek, I.; Papathanassiou, K.P.; Moreira, A. A New Detection Algorithm for Coherent Scatterers in SAR Data. IEEE Trans. Geosci. Remote Sens. 2015, 53, 6293–6307. [Google Scholar] [CrossRef]
- Renga, A.; Daniela Graziano, M.; Moccia, A.; D’Errico, M. Adaptive Threshold and Sub-Look Processing in Ship Detection by SAR. In Proceedings of the OCEANS 2015-Genova, Genoa, Italy, 18–21 May 2015; pp. 1–8. [Google Scholar] [CrossRef]
- Tian, M.; Yang, Z.; Duan, C.; Liao, G.; Liu, Y.; Wang, C.; Huang, P. A Method for Active Marine Target Detection Based on Complex Interferometric Dissimilarity in Dual-Channel ATI-SAR Systems. IEEE Trans. Geosci. Remote Sens. 2020, 58, 251–267. [Google Scholar] [CrossRef]
- Gao, G.; Huang, K.; Gao, S.; He, J.; Zhang, X. Ship Detection Based on Oceanic Displaced Phase Center Antenna Technique in Along-Track Interferometric SAR. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2019, 12, 788–802. [Google Scholar] [CrossRef]
- Baumgartner, S.V.; Krieger, G. Ship Detection and Motion Parameter Estimation with TanDEM-X in Large along-Track Baseline Configuration. ESA Spec. Publ. 2013, 709, 18. [Google Scholar]
- Makhoul, E.; Baumgartner, S.V.; Jager, M.; Broquetas, A. Multichannel SAR-GMTI in Maritime Scenarios With F-SAR and TerraSAR-X Sensors. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2015, 8, 5052–5067. [Google Scholar] [CrossRef]
- Oveis, A.H.; Sebt, M.A. Dictionary-Based Principal Component Analysis for Ground Moving Target Indication by Synthetic Aperture Radar. IEEE Geosci. Remote Sens. Lett. 2017, 14, 1594–1598. [Google Scholar] [CrossRef]
- Lombardo, P.; Pastina, D.; Turin, F. Ground Moving Target Detection Based on MIMO SAR Systems. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2015, 8, 5081–5095. [Google Scholar] [CrossRef]
- Börner, T.; Marull Paretas, G.; Baumgartner, S.; Lopez-Dekker, P.; Sauer, S.; Krieger, G.; D’Addio, S. ATI and GMTI Performance Analysis of Post-Sentinel-1 SAR Systems Based on Simulations Using OASIS. In Proceedings of the EUSAR 2014 10th European Conference on Synthetic Aperture Radar, Berlin, Germany, 3–5 June 2014; pp. 1–4. [Google Scholar]
- Margarit, G.; Tabasco, A. European Commission: CORDIS: Projects and Results: Final Report Summary-SAGRES (Services Activations for GRowing Eurosur’s Success). Available online: https://cordis.europa.eu/result/rcn/172060_en.html (accessed on 27 November 2017).
- Topputo, F.; Massari, M.; Lombardi, R.; Gianinetto, M.; Marchesi, A.; Aiello, M.; Tebaldini, S.; Banda, F. Space Shepherd: Search and Rescue of Illegal Immigrants in the Mediterranean Sea through Satellite Imagery. In Proceedings of the 2015 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Milan, Italy, 26–31 July 2015; pp. 4852–4855. [Google Scholar] [CrossRef]
- Margarit, G. NEREIDS: New Concepts in Maritime Surveillance for Consolidating Operational Developments. In Proceedings of the 2012 Esa’s Seasar Workshop, Tromso, Norway, 18–22 June 2012; pp. 18–22. [Google Scholar] [CrossRef]
- Margarit, G.; Mallorquí, J.J.; Fortuny-Guasch, J.; López-Martínez, C. Exploitation of Ship Scattering in Polarimetric SAR for an Improved Classification under High Clutter Conditions. IEEE Geosci. Remote Sens. Trans. 2009, 47, 1224–1235. [Google Scholar] [CrossRef]
- Iervolino, P.; Guida, R.; Whittaker, P. A New GLRT-Based Ship Detection Technique in SAR Images. Available online: http://ieeexplore.ieee.org/xpls/icp.jsp?arnumber=7326480 (accessed on 5 October 2016).
- Mott, H. Remote Sensing with Polarimetric Radar; John Wiley & Sons: Hoboken, NJ, USA, 2006. [Google Scholar]
- Suchandt, S.; Runge, H.; Breit, H.; Kotenkov, A.; Weihing, D.; Hinz, S. Traffic Measurement with TerraSAR-X: Processing System Overview and First Results. In Proceedings of the 2008 7th European Conference on VDE Synthetic Aperture Radar (EUSAR), Friedrichshafen, Germany, 2–5 June 2008; pp. 1–4. [Google Scholar]
- Graziano, M.D. SAR-Based Ship Route Estimation by Wake Components Detection and Classification. In Proceedings of the 2015 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Milan, Italy, 26–31 July 2015; pp. 3255–3258. [Google Scholar] [CrossRef]
- Richards, J.A. Remote Sensing with Imaging Radar; Signals and Communication Technology; Springer: Berlin/Heidelberg, Germany, 2009. [Google Scholar] [CrossRef]
- Jackson, F.C.; Lyzenga, D.R. Microwave Techniques for Measuring Directional Wave Spectra. In Surface Waves and Fluxes; Geernaert, G.L., Plant, W.L., Eds.; Springer: Dordrecht, The Netherlands, 1990; pp. 221–264. [Google Scholar] [CrossRef]
- Elfouhaily, T.; Chapron, B.; Katsaros, K.; Vandemark, D. A Unified Directional Spectrum for Long and Short Wind-driven Waves. J. Geophys. Res. Ocean. 1997, 102, 15781–15796. [Google Scholar] [CrossRef]
- Cloude, S. Polarisation: Applications in Remote Sensing; Oxford University Press: Oxford, UK, 2010. [Google Scholar]
- Plant, W.J. Bragg Scattering of Electromagnetic Waves from the Air/Sea Interface. In Surface Waves and Fluxes: Volume II—Remote Sensing; Geernaert, G.L., Plant, W.L., Eds.; Environmental Fluid Mechanics; Springer: Dordrecht, The Netherlands, 1990; pp. 41–108. [Google Scholar] [CrossRef]
- Thompson, D.R. Calculation of Microwave Doppler Spectra from the Ocean Surface with a Time-Dependent Composite Model. In Radar Scattering from Modulated Wind Waves: Proceedings of the Workshop on Modulation of Short Wind Waves in the Gravity-Capillary Range by Non-Uniform Currents, Bergen Aan Zee, The Netherlands, 24–26 May 1988; Komen, G.J., Oost, W.A., Eds.; Springer: Dordrecht, The Netherlands, 1989; pp. 27–40. [Google Scholar] [CrossRef]
- Alpers, W. Imaging Ocean Surface Waves by Synthetic Aperture Radar: A Review. In Satellite Microwave Remote Sensing; Ellis Horwood: Chichester, UK, 1983; pp. 107–119. [Google Scholar]
- Wackerman, C.C.; Friedman, K.S.; Pichel, W.G.; Clemente-Colón, P.; Li, X. Automatic Detection of Ships in RADARSAT-1 SAR Imagery. Can. J. Remote Sens. 2001, 27, 568–577. [Google Scholar] [CrossRef]
- Brizi, M.; Lombardo, P.; Pastina, D. Exploiting the Shadow Information to Increase the Target Detection Performance in SAR Images. In Proceedings of the 5th International Conference and Exhibition on Radar Systems, Brest, France, 17–21 May 1999. [Google Scholar]
- Vachon, P.; Campbell, J.; Bjerkelund, C.; Dobson, F.; Rey, M. Ship Detection by the RADARSAT SAR: Validation of Detection Model Predictions. Can. J. Remote Sens. 1997, 23, 48–59. [Google Scholar] [CrossRef]
- Marino, A.; Cloude, S.R.; Woodhouse, I.H. A Polarimetric Target Detector Using the Huynen Fork. IEEE Trans. Geosci. Remote Sens. 2010, 48, 2357–2366. [Google Scholar] [CrossRef]
- Chapple, P.B.; Bertilone, D.C.; Caprari, R.S.; Newsam, G.N. Stochastic Model-Based Processing for Detection of Small Targets in Non-Gaussian Natural Imagery. IEEE Trans. Image Process. 2001, 10, 554–564. [Google Scholar] [CrossRef]
- Friedman, K.S.; Wackerman, C.; Funk, F.; Pichel, W.G.; Clemente-Colón, P.; Li, X. Validation of a CFAR Vessel Detection Algorithm Using Known Vessel Locations. In Proceedings of the IGARSS 2001, Scanning the Present and Resolving the Future, IEEE 2001 International Geoscience and Remote Sensing Symposium (Cat. No. 01CH37217), Sydney, NSW, Australia, 9–13 July 2001; Volume 4, pp. 1804–1806. [Google Scholar]
- Johannessen, J.A. Coastal Observing Systems: The Role of Synthetic Aperture Radar. Johns Hopkins APL Tech. Dig. 2000, 21, 9. [Google Scholar]
- Lopes, A.; Nezry, E.; Touzi, R.; Laur, H. Structure Detection and Statistical Adaptive Speckle Filtering in SAR Images. Int. J. Remote Sens. 1993, 14, 1735–1758. [Google Scholar] [CrossRef]
- Olsen, R.B.; Wahl, T. The Ship Detection Capability of ENVISAT’s ASAR. In Proceedings of the IGARSS’03 Geoscience and Remote Sensing Symposium, Toulouse, France, 21–25 July 2003; Volume 5, pp. 3108–3110. [Google Scholar]
- Schwartz, G.; Alvarez, M.; Varfis, A.; Kourti, N. Elimination of False Positives in Vessels Detection and Identification by Remote Sensing. In Proceedings of the IEEE International Geoscience and Remote Sensing Symposium, Toronto, ON, Canada, 24–28 June 2002; Volume 1, pp. 116–118. [Google Scholar]
- Wang, C.; Jiang, S.; Zhang, H.; Wu, F.; Zhang, B. Ship Detection for High-Resolution SAR Images Based on Feature Analysis. IEEE Geosci. Remote Sens. Lett. 2014, 11, 119–123. [Google Scholar] [CrossRef]
- Brusch, S.; Lehner, S.; Fritz, T.; Soccorsi, M.; Soloviev, A.; van Schie, B. Ship Surveillance with TerraSAR-X. IEEE Trans. Geosci. Remote Sens. 2011, 49, 1092–1103. [Google Scholar] [CrossRef]
- Iervolino, P.; Guida, R.; Whittaker, P. NovaSAR-S and Maritime Surveillance. In Proceedings of the 2013 IEEE International Geoscience and Remote Sensing Symposium-IGARSS, Melbourne, VIC, Australia, 21–26 July 2013; pp. 1282–1285. [Google Scholar]
- Dell’Acqua, F.; Gamba, P.; Lisini, G. Rapid Mapping of High Resolution SAR Scenes. ISPRS J. Photogramm. Remote Sens. 2009, 64, 482–489. [Google Scholar] [CrossRef]
- Margarit, G.; Barba Milanés, J.A.; Tabasco, A. Operational Ship Monitoring System Based on Synthetic Aperture Radar Processing. Remote Sens. 2009, 1, 375–392. [Google Scholar] [CrossRef]
- Yeremy, M.L.; Geling, G.; Rey, M. Results from the Crusade Ship Detection Trial: Polarimetric SAR. IEEE Int. Geosci. Remote Sens. Symp. 2002, 2, 711–713. [Google Scholar] [CrossRef]
- Subotic, N.S.; Thelen, B.J.; Gorman, J.D.; Reiley, M.F. Multiresolution Detection of Coherent Radar Targets. IEEE Trans. Image Process. 1997, 6, 21–35. [Google Scholar] [CrossRef]
- Brekke, C. Automatic Ship Detection Based on Satellite SAR. FFI Rapp. 2008, 84. Available online: https://ffi-publikasjoner.archive.knowledgearc.net/handle/20.500.12242/2139 (accessed on 22 October 2020).
- Kay, S.M. Fundamentals of Statistical Signal Processing, Volume i: Estimation Theory (v. 1); PTR Prentice-Hall, Englewood Cliffs: Upper Saddle River, NJ, USA, 1993. [Google Scholar]
- Lombardo, P.; Sciotti, M.; Kaplan, L.M. SAR Prescreening Using Both Target and Shadow Information. In Proceedings of the Radar Conference, Atlanta, GA, USA, 3 May 2001; pp. 147–152. [Google Scholar]
- El-Darymli, K.; McGuire, P.; Power, D.; Moloney, C.R. Target Detection in Synthetic Aperture Radar Imagery: A State-of-the-Art Survey. J. Appl. Remote Sens. 2013, 7, 071598. [Google Scholar] [CrossRef]
- Kleynhans, W.; Salmon, B.P.; Schwegmann, C.P.; Seotlo, M.V. Ship Detection in South African Oceans Using a Combination of SAR and Historic LRIT Data. In Proceedings of the 2013 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Melbourne, VIC, Australia, 21–26 July 2013; pp. 1521–1524. [Google Scholar]
- Fengqian, P.; Fukun, B.; Liang, C.; Zhu, B. A Cascaded False-Alarm Elimination Method for Accurate Ship Detection in SAR Images. In Proceedings of the IET International Radar Conference 2013, Xi’an, China, 14–16 April 2013; Institution of Engineering and Technology: Xi’an, China, 2013; p. 0671. [Google Scholar] [CrossRef]
- An, W.; Xie, C.; Yuan, X. An Improved Iterative Censoring Scheme for CFAR Ship Detection with SAR Imagery. IEEE Trans. Geosci. Remote Sens. 2014, 52, 4585–4595. [Google Scholar]
- Huang, S.; Liu, D.; Gao, G.; Guo, X. A Novel Method for Speckle Noise Reduction and Ship Target Detection in SAR Images. Pattern Recognit. 2009, 42, 1533–1542. [Google Scholar] [CrossRef]
- Schwegmann, C.P.; Kleynhans, W.; Salmon, B.P.; Mdakane, L. A CA-CFAR and Localized Wavelet Ship Detector for Sentinel-1 Imagery. In Proceedings of the 2015 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Milan, Italy, 26–31 July 2015; pp. 3707–3710. [Google Scholar] [CrossRef]
- Atteia, G.; Collins, M.J. Ship Detection Performance Assessment for Simulated RCM SAR Data. In Proceedings of the Geoscience and Remote Sensing Symposium (IGARSS), IEEE International, Quebec City, QC, Canada, 13–18 July 2014; pp. 553–556. [Google Scholar]
- Totir, F.; Demeter, S.; Radoi, E. Sea Clutter Simulation and Comparative Study of Effects in Radar Imagery; METRA: Bucarest, Romania, 2005. [Google Scholar]
- Yam, L.E.; Mallorqui, J.J.; Rius, J.M. Validation of a Sea Surface Model for Simulations of Dynamic Maritime SAR Images. In Proceedings of the 2012 IEEE International Geoscience and Remote Sensing Symposium, Munich, Germany, 22–27 July 2012; pp. 2813–2816. [Google Scholar] [CrossRef]
- Tao, D.; Anfinsen, S.N.; Brekke, C. Ocean Clutter Modeling for Ship Detection. In Proceedings of the SEASAR, Tromso, Norway, 18–22 June 2012; p. 6. [Google Scholar]
- Errasti-Alcala, B.; Fuscaldo, W.; Braca, P.; Vivone, G. Realistic Ship Model for Extended Target Tracking Algorithms. In Proceedings of the 2015 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Milan, Italy, 26–31 July 2015; pp. 3135–3138. [Google Scholar] [CrossRef]
- Ouchi, K.; Tamaki, S.; Yaguchi, H.; Iehara, M. Ship Detection Based on Coherence Images Derived From Cross Correlation of Multilook SAR Images. IEEE Geosci. Remote Sens. Lett. 2004, 1, 184–187. [Google Scholar] [CrossRef]
- Marino, A. A Notch Filter for Ship Detection with Polarimetric SAR Data. Sel. Top. Appl. Earth Obs. Remote Sens. IEEE J. 2013, 6, 1219–1232. [Google Scholar] [CrossRef]
- Touzi, R. On the Use of Polarimetric SAR Data for Ship Detection. In Proceedings of the IEEE 1999 International Geoscience and Remote Sensing Symposium IGARSS’99 (Cat. No.99CH36293), Hamburg, Germany, 28 June–2 July 1999; Volume 2, pp. 812–814. [Google Scholar] [CrossRef]
- Liu, C.; Vachon, P.W.; Geling, G.W. Improved Ship Detection Using Polarimetric SAR Data. In Proceedings of the IGARSS, 2004 IEEE International Geoscience and Remote Sensing Symposium, Anchorage, AK, USA, 20–24 September 2004; Volume 3, pp. 1800–1803. [Google Scholar] [CrossRef]
- Nunziata, F.; Montuori, A.; Migliaccio, M. Dual-Polarized COSMO SkyMed SAR Data to Observe Metallic Targets at Sea. In Proceedings of the 2011 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Vancouver, BC, Canada, 24–29 July 2011; pp. 2270–2273. [Google Scholar]
- Arnaud, A. Ship Detection by SAR Interferometry. In Proceedings of the IEEE 1999 International Geoscience and Remote Sensing Symposium, IGARSS’99 (Cat. No. 99CH36293), Hamburg, Germany, 28 June–2 July 1999; Volume 5, pp. 2616–2618. [Google Scholar] [CrossRef]
- Hannevik, T.N. Multi-Channel and Multi-Polarisation Ship Detection. In Proceedings of the 2012 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Munich, Germany, 22–27 July 2012; pp. 5149–5152. [Google Scholar]
- Arnesen, T.; Olsen, R.B.; Weydahl, D. Ship Detection Signatures in AP Mode Data. In Proceedings of the 56th International Astronautical Congress of the International Astronautical Federation, the International Academy of Astronautics, and the International Institute of Space Law, Fukuoka, Japan, 17–21 October 2005; International Astronautical Congress (IAF), American Institute of Aeronautics and Astronautics: Fukuoka, Japan, 2005. [Google Scholar] [CrossRef]
- Hannevik, T.N.A. Combining Polarimetric Channels for Better Ship Detection Results. ESA Spec. Publ. 2013, 713, 30. [Google Scholar]
- Lee, J.S.; Pottier, E. Polarimetric Radar Imaging: From Basics to Applications; CRC Press: Boca Raton, FL, USA, 2009. [Google Scholar]
- Pleskachevsky, A.; Lehner, S.; Heege, T.; Mott, C. Synergy and Fusion of Optical and Synthetic Aperture Radar Satellite Data for Underwater Topography Estimation in Coastal Areas. Ocean Dyn. 2011, 61, 2099–2120. [Google Scholar] [CrossRef]
- Woodhouse, I.H. Introduction to Microwave Remote Sensing; CRC Press: Boca Raton, FL, USA, 2005. [Google Scholar]
- Marino, A.; Sugimoto, M.; Ouchi, K.; Hajnsek, I. Validating a Notch Filter for Detection of Targets at Sea with ALOS-PALSAR Data: Tokyo Bay. Sel. Top. Appl. Earth Obs. Remote Sens. IEEE J. 2014, 7, 4907–4918. [Google Scholar] [CrossRef]
- Atteia, G.; Collins, M.J. On the Use of Compact Polarimetry SAR for Ship Detection. Available online: http://www.sciencedirect.com/science/article/pii/S0924271613000294 (accessed on 23 May 2013).
- Novak, L.M.; Sechtin, M.B.; Burl, M.C. Algorithms for Optimal Processing of Polarimetric Radar Data; Massachusetts Inst. of Tech Lexington Lincoln Lab: Lexington, MA, USA, 1989; p. 99. [Google Scholar]
- Lehner, S.; Pleskachevsky, A.; Brusch, S.; Bruck, M.; Soccorsi, M.; Velotto, D. Ship Surveillance with High Resolution Terrasar-X Satellite in African Waters. In Remote Sensing of the African Seas; Springer: Berlin, Germany, 2014; pp. 285–313. [Google Scholar]
- Zhou, H.; Wang, C.; Yang, J.; Tian, Y.; Wen, B. Wind and Current Dependence of the First-Order Bragg Scattering Power in High-Frequency Radar Sea Echoes. IEEE Geosci. Remote Sens. Lett. 2017, 14, 2428–2432. [Google Scholar] [CrossRef]
- Hannevik, T.N. Automatic Ship Detection in Sar Images Using Aegir. In Proceedings of the 2010 IEEE International Geoscience and Remote Sensing Symposium, Honolulu, HI, USA, 25–30 July 2010; pp. 3712–3715. [Google Scholar] [CrossRef]
- Canty, M.J. Image Analysis, Classification and Change Detection in Remote Sensing: With Algorithms for ENVI/IDL and Python; CRC Press: Boca Raton, FL, USA, 2014. [Google Scholar]
- Ren, Y.; Lehner, S.; Brusch, S.; Li, X.; He, M. An Algorithm for the Retrieval of Sea Surface Wind Fields Using X-Band TerraSAR-X Data. Int. J. Remote Sens. 2012, 33, 7310–7336. [Google Scholar] [CrossRef]
- Thompson, D.; Elfouhaily, T.; Chapron, B. Polarization Ratio for Microwave Backscattering from the Ocean Surface at Low to Moderate Incidence Angles. In Proceedings of the Sensing and Managing the Environment, 1998 IEEE International Geoscience and Remote Sensing, Symposium Proceedings, IGARSS ’98, (Cat. No. 98CH36174), Seattle, WA, USA, 6–10 July 1998; Volume 3, pp. 1671–1673. [Google Scholar] [CrossRef]
























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Mission | Acquisition Mode | Single pol HH | Single pol VV | Dual cross-pol | Dual co-pol |
|---|---|---|---|---|---|
| TerraSAR-X (TSX) | High-Res. Spotlight (HS) | 1L, 7H | 1L, 4H | n.a. | 2L, 12H |
| Stripmap (SM) | 1L, 4H | 1L, 2H | 1L, 5H | 3L, 9H | |
| TanDEM-X (TDX) | High-Res Spotlight (HS) | 1L, 2H | n.a. | n.a. | 0L, 2H |
| Sentinel-1 (S1) | Interferometric Wide Swath (IW) | n.a. | n.a. | 2L, 6H | n.a. |
| TSX-HS | TSX-SM | S1-IW | |
|---|---|---|---|
| Single-pol | 0.79 | 1.52 | - |
| Dual-pol | 1.45 | 2.57 | 71.74 |
| Experiment | Movement | Orientation | Superstructure | # Images | |
|---|---|---|---|---|---|
| TSX | S1 | ||||
| orthogonal | static | 90 | empty | 27 | 8 |
| inclined | static | 45 | empty | 10 | 0 |
| parallel | static | 0 | empty | 4 | 0 |
| full | static | 90 | 30 passengers | 4 | 0 |
| movingAZ | moving | 90 | empty | 8 | 0 |
| movingR | moving | 0 | empty | 5 | 0 |
| (a) Wind speed (ms−1). | ||||
| <2.5 | 2.5–5 | 5–7.5 | 7.5–10 | |
| # TSX datasets | 24 | 21 | 6 | 2 |
| # S1 datasets | 6 | 0 | 2 | 0 |
| (b) Wind direction (in degrees relative to the LoS). | ||||
| <30 | 31–60 | 61–90 | ||
| # TSX datasets | 27 | 20 | 6 | |
| # S1 datasets | 4 | 2 | 2 | |
| Experiment | Sum (only TSX) | |||||||
|---|---|---|---|---|---|---|---|---|
| Orthogonal | Inclined | Parallel | Full | MovingAZ | MovingR | |||
| Polarization | HH | 83 (12;4) | 75 (4;0) | 100 (3;1) | 100 (3;0) | 100 (5;1) | 0 (4;1) | 77 (31;7) |
| VV | 83 (12;3) | 100 (4;1) | 100 (1;0) | 100 (1;0) | 50 (2;0) | 0 (1;0) | 81 (21;4) | |
| HV/VH | 0 (3;0) | 50 (2;0) | - | - | 0 (1;0) | - | 17 (6;0) | |
| Incidence Angle | high | 88 (17;0) | 80 (10;1) | 100 (4;1) | 100 (4;0) | 75 (8;1) | 0 (4;0) | 79 (47;3) |
| low | 50 (10;7) | - | - | - | - | 0 (1;1) | 45 (11;8) | |
| Platform/ Acquisition Mode | TSX-HS | 77 (13;4) | 100 (3;1) | 100 (3;1) | 100 (4;0) | 75 (4;0) | 0 (5;1) | 72 (32;7) |
| TSX-SM | 71 (14;3) | 71 (7;0) | 100 (1;0) | - | 75 (4;1) | - | 73 (26;4) | |
| S1-IW | 25 (8;1) | - | - | - | - | - | 25 (8;1) | |
| Sum (only TSX) | 74 (27;7) | 80 (10;1) | 100 (4;1) | 100 (4;0) | 75 (8;1) | 0 (5;1) | 72 (58;11) | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lanz, P.; Marino, A.; Brinkhoff, T.; Köster, F.; Möller, M. The InflateSAR Campaign: Evaluating SAR Identification Capabilities of Distressed Refugee Boats. Remote Sens. 2020, 12, 3516. https://doi.org/10.3390/rs12213516
Lanz P, Marino A, Brinkhoff T, Köster F, Möller M. The InflateSAR Campaign: Evaluating SAR Identification Capabilities of Distressed Refugee Boats. Remote Sensing. 2020; 12(21):3516. https://doi.org/10.3390/rs12213516
Chicago/Turabian StyleLanz, Peter, Armando Marino, Thomas Brinkhoff, Frank Köster, and Matthias Möller. 2020. "The InflateSAR Campaign: Evaluating SAR Identification Capabilities of Distressed Refugee Boats" Remote Sensing 12, no. 21: 3516. https://doi.org/10.3390/rs12213516
APA StyleLanz, P., Marino, A., Brinkhoff, T., Köster, F., & Möller, M. (2020). The InflateSAR Campaign: Evaluating SAR Identification Capabilities of Distressed Refugee Boats. Remote Sensing, 12(21), 3516. https://doi.org/10.3390/rs12213516