1. Introduction
Satellite remote sensing aims to obtain information from the Earth’s surface. It has been widely used in geography, Earth science, meteorology, military, etc. [
1]. In traditional imaging missions, a single low Earth orbit satellite is often used to take images of multiple targets multiple times. However, the increasing number of missions and the higher time resolution requirements call for more satellite members [
2]. Besides, different missions require different kinds of payload, but multiple payloads can hardly be carried by one satellite. Furthermore, multiple payloads can hardly work together at the same time in the narrow imaging time window. Therefore, current remote sensing missions rely more and more on large satellite clusters, which brings new challenges to mission assignment and planning [
3].
A multi-agent system (MAS) is the main solution to the distributed autonomy problem for multiple satellites. Agent technology was first used in DeepSpace-1 (DS-1) [
4,
5]. Although MAS applied in DS-1 is a single satellite system, with its success the MAS started to be wildly used in satellite cluster task planning. Campbell [
6,
7,
8] summarized the work of predecessors, and defined four different working modes of satellite cluster, including traditional mode, top-down mode, centralized mode, and distribute mode. The traditional mode and the top-down mode were used in the early satellite clusters. For instance, He [
9] proposed an edge computing framework including a central node and several edge nodes using a constructive heuristic algorithm based on the density of residual tasks. Although these algorithms have achieved good results, the central node (ground station or central master satellite) works very hard.
Current research mainly focuses on the latter two modes: the centralized mode and the distributed mode. Cheng [
10] developed a satellite cluster negotiation and mission assignment method by using contract net in the centralized mode. He proposed three negotiation models: acquaintance’s trust-based announcing bidding, adaptive bidding with swarm intelligence, and a multi-attribute decision-based fuzzy evaluation bidding method. Wang [
11] discussed the cooperative multicenter problem on satellite imaging scheduling and proposed a cooperative co-evolutionary algorithm, and then proposed a novel fixed-length binary encoding mechanism for missions assignment. Iacopino [
12] designed a self-organizing multi-agent structure belong to the distribution mode. The system can adapt to the change of the problems and can synchronize the satellites’ plans in order to avoid duplication. In order to improve cluster consistency, Zhao [
13] designed a distributed time consensus protocol for multi-agent systems with general linear dynamics on a directed graph. Buzzi [
14] proposed an agent-based framework to study the self-organization of the satellite cluster, which can establish a temporary alliance to change the modularity of the system.
Since a remote sensing mission is usually divided into multiple stages (discovery, identification, confirmation, tracking, and monitoring) and one stage can further be divided into multiple steps (collection, transmission, process, etc.), a micro-satellite is not able to finish a mission all by itself. Current research has begun to focus on the cooperation of satellite clusters toward finishing one complex mission instead of merely using one satellite. Globus [
15] used multiple variants of the genetic algorithm, hill climbing, simulated annealing, squeaky wheel optimization, and iteration to realize the coordination of multiple satellites and multiple observations of the same target. Araguz [
16] designed autonomous operational schemes for Earth-observing swarms of nano-satellites, in which all satellites cooperate to observe multiple targets. Gallud [
17] presented an agent-based simulation framework. In his study, satellites could work together to perform a set of observational tasks. His framework supported allocation targets for satellites and collective sensing of a target for multi-satellites. He [
18] considered three important sections of planning (store sequence of tasks, action sequence, and the satellite status) to deal with scientific event discovery, satellite faults, cloud obscuration, and emergencies.
The main problem of the remote sensing mission lies in the conflict between resource consumption and mission accomplishment. The researchers considered many factors. Nag Sreeja [
19] proposed a modular framework that combines orbital mechanics, attitude control, and scheduling optimization working on Cubesats. Wang [
20] discussed the impact of clouds in the case of joint probabilities, and established a sample average approximation (SAA) model accordingly. Wang [
21] also proposed a branch and cut algorithm based on lazy constraint generation. Although these kinds of limited resources onboard have been considered, the influence of time delay on negotiation is less related to that. The time delay is mainly caused by limited communication ability and computational resources. When a satellite keeps tracking a target, it has to act out a continuous attitude maneuver which affects the pointing accuracy of its antenna, resulting in a decrease of the communication quality. Besides, tracking a target produces a large number of images, the process of which is heavy work for a single micro-satellite. A common way is to transmit those images to other micro-satellites. However, image transmission occupies a large amount of communication bandwidth, so that less communication bandwidth can be left for negotiation. Lastly, the image process itself is computationally expensive, so that a micro-satellite can hardly negotiate with others when processing images. In conclusion, a large time delay may cause the delay of negotiation and may finally lead to negotiation failure.
In this paper, we propose a neural-network-based multi-granularity negotiation method under decentralized architecture belonging to distributed mode in [
6,
7,
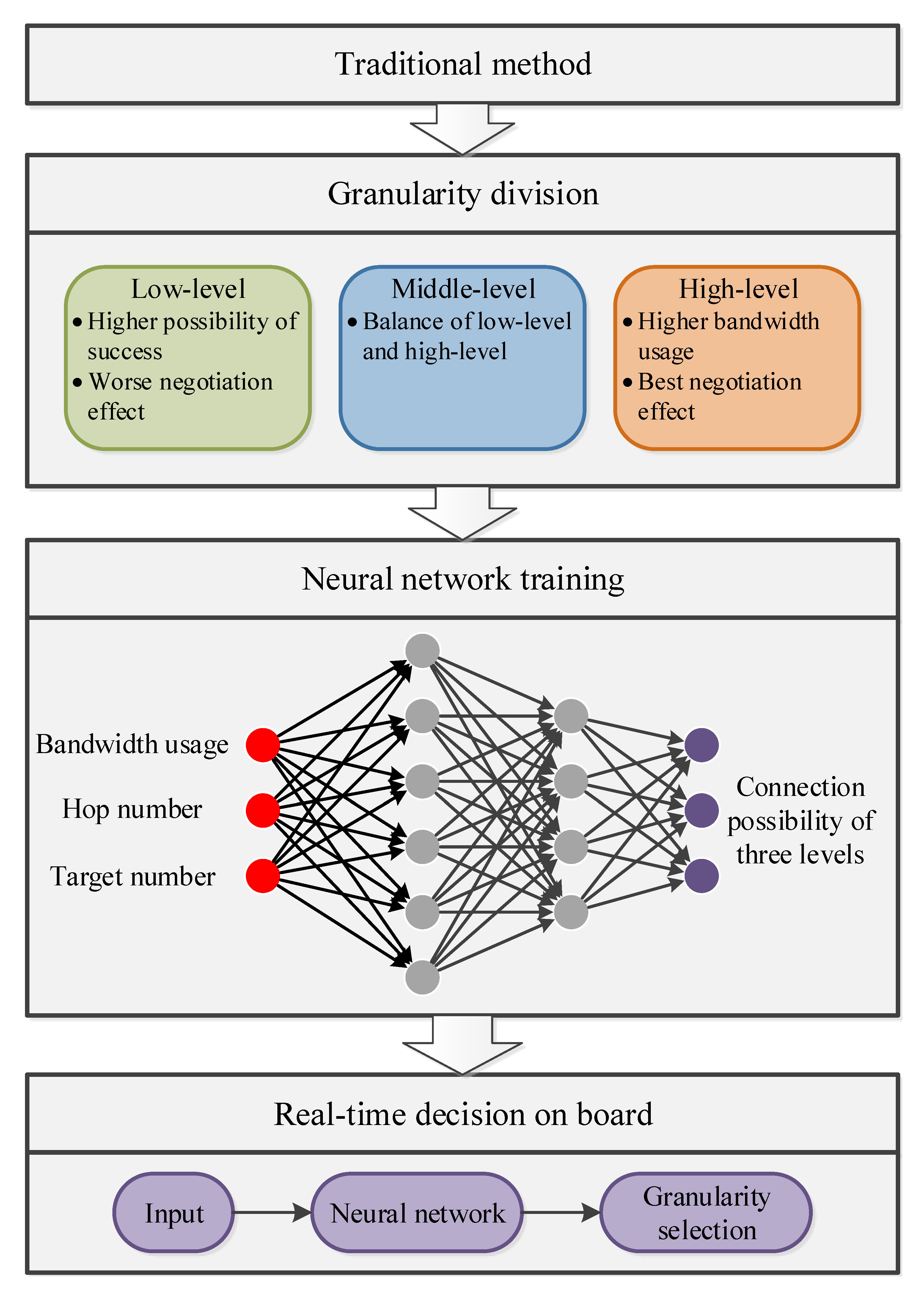
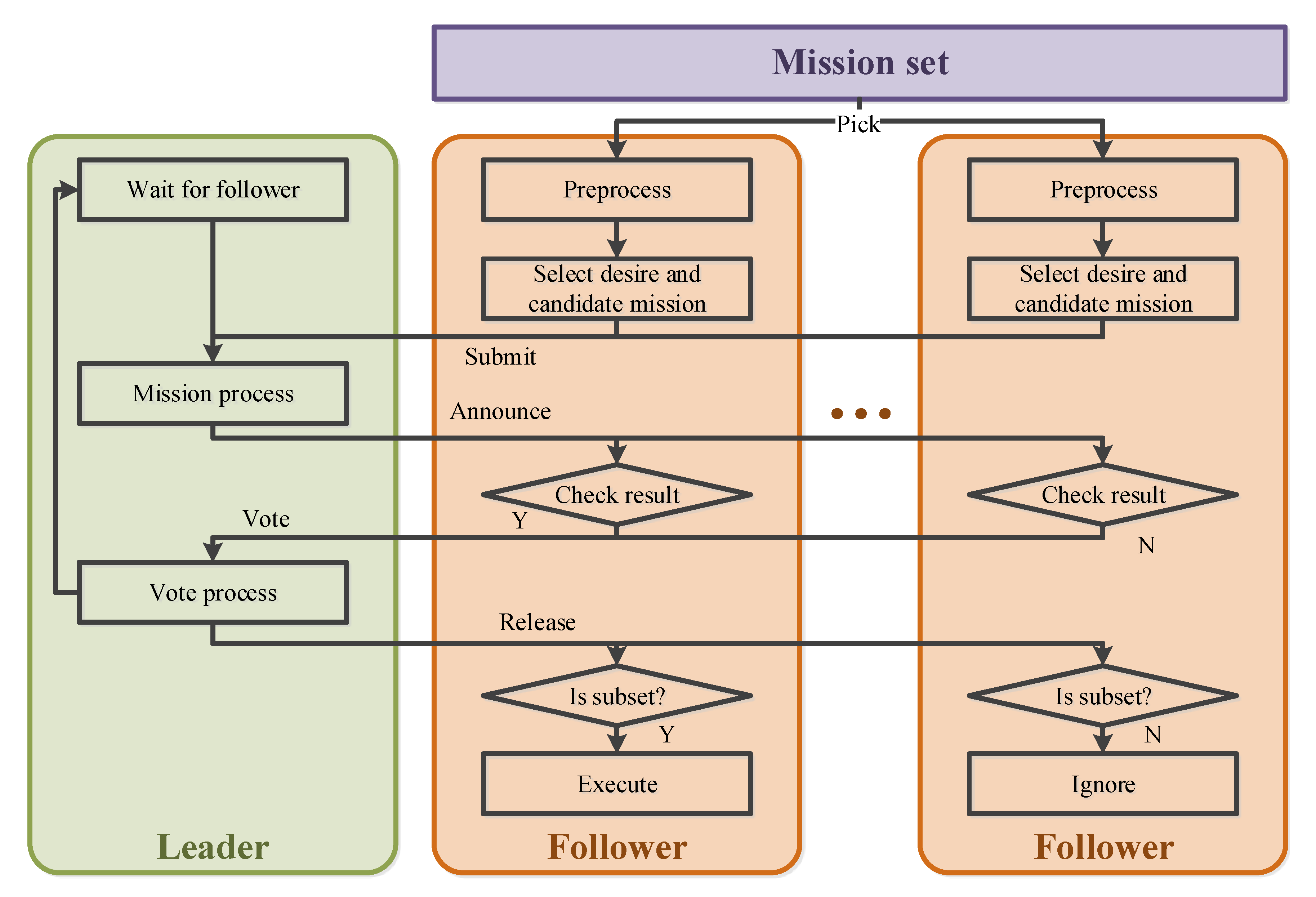
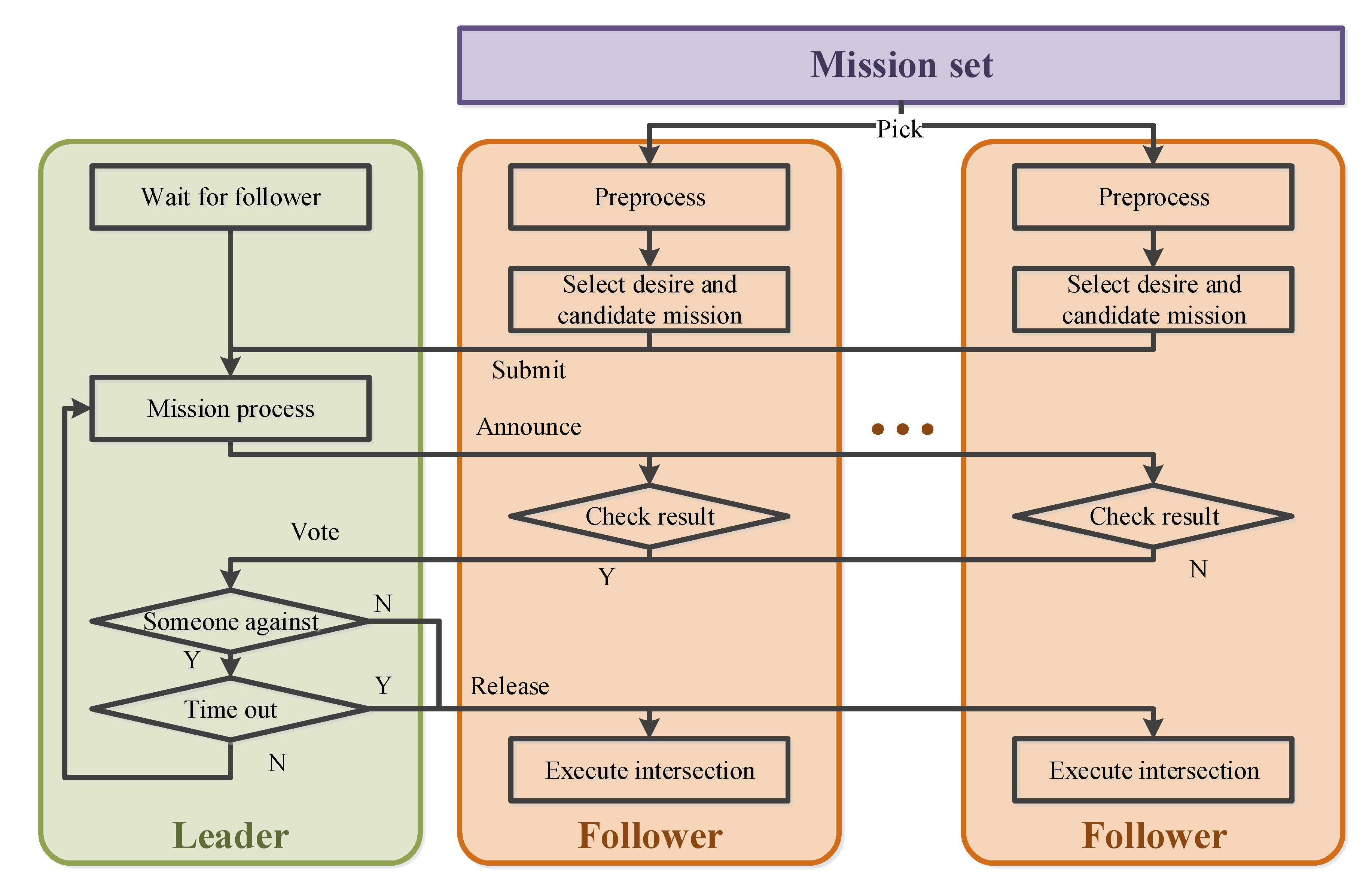
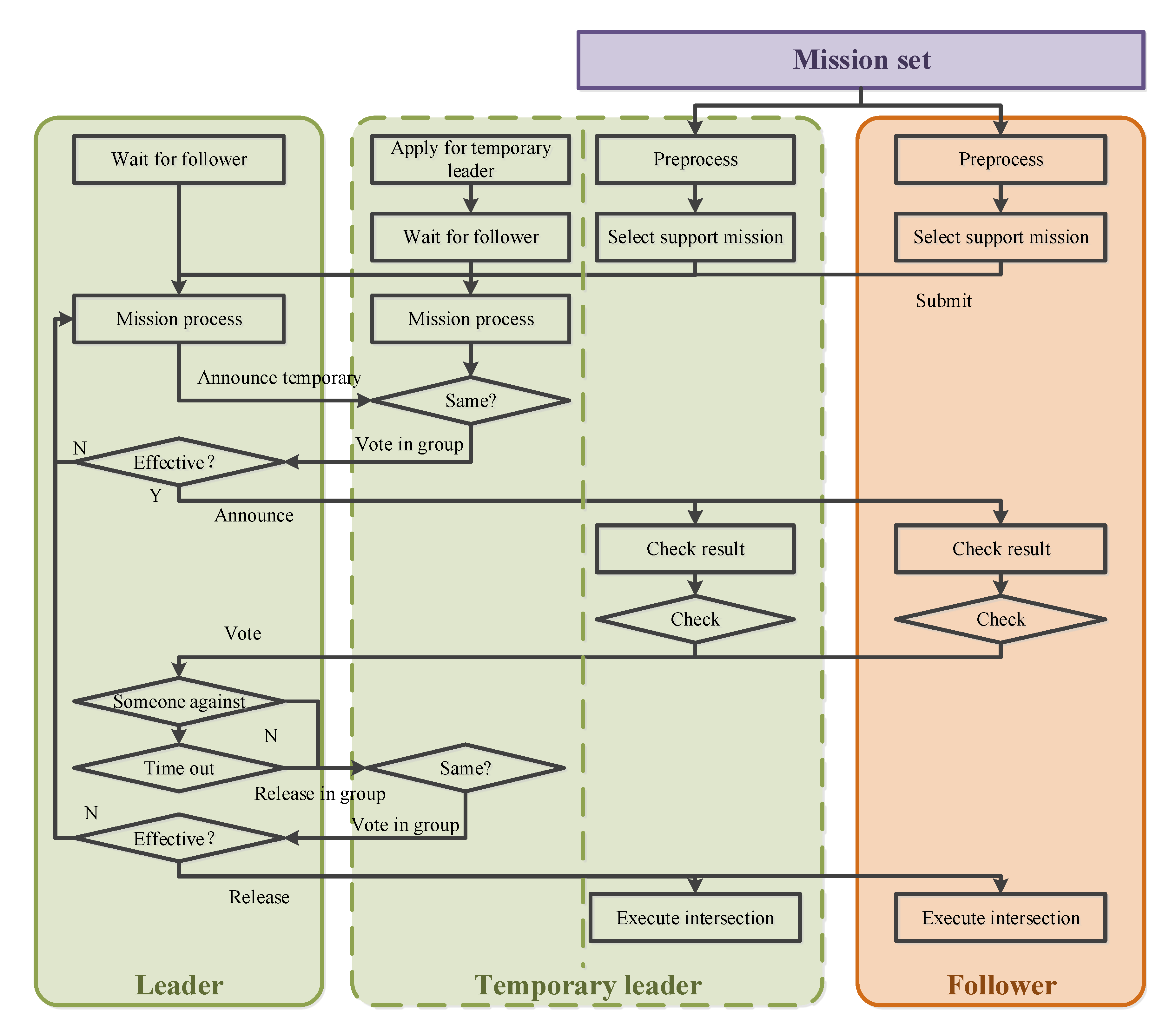
8]. Firstly, we propose a multi-granularity negotiation model. The negotiation process is divided into three levels of granularity: low-level granularity, middle-level granularity, and high-level granularity. In each granularity, satellites transmit different kinds of information and use different negotiation processes and assignment algorithms. Secondly, we establish a neural network to intelligently select the appropriate level of granularity. The neural network could output the success probabilities of negotiation in each level of granularity. Then a simple decision mode based on the probabilities is used to select the level in real-time.
The remainder of the paper is organized as follows. In
Section 2, the modeling process of the multi-granularity negotiation method is introduced considering three aspects: mission preprocesses for all levels of granularity, multi-granularity partitioning of the multi-agent negotiation model, and intelligent real-time level selection of negotiation granularity. In
Section 3, experiments to verify this method in different conditions are described. The proposed method is discussed in
Section 4. Finally, the conclusions of the study are given in
Section 5.
4. Discussion
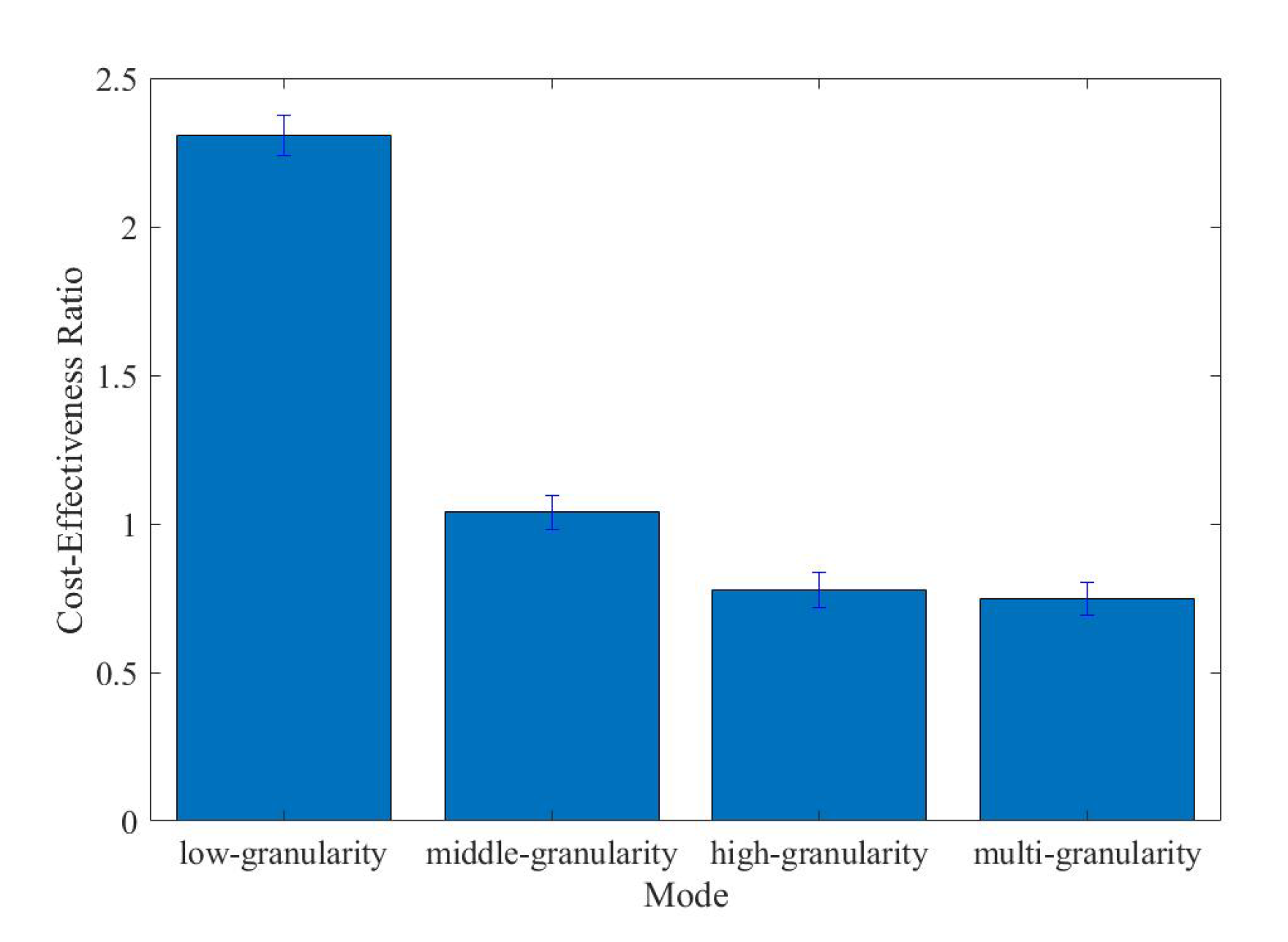
Resources onboard are limited, which means the resources for satellite clusters, such as communication resources and computation resources, may have conflicting demands from the mission and negotiations. This causes failure of negotiations easily. Therefore we need a method to balance the gains from negotiation and negotiation delay. We proposed a method in which the negotiations are divided into three levels of granularity with different working modes. As shown the result, these three levels of granularity perform differently, which means this division is effective and can be used in different situations. Moreover, the satellite selects the best level onboard in real-time, and achieves better performance than each of the three levels. Additionally, the satellite can select the level onboard without many resources. The cost-effectiveness ratio of the satellite cluster is increased. It is worth noting that the three levels of granularity were designed by the author based on the author’s task planning algorithm. That means the number and mode of each granularity may be different from those in other task planning algorithms.
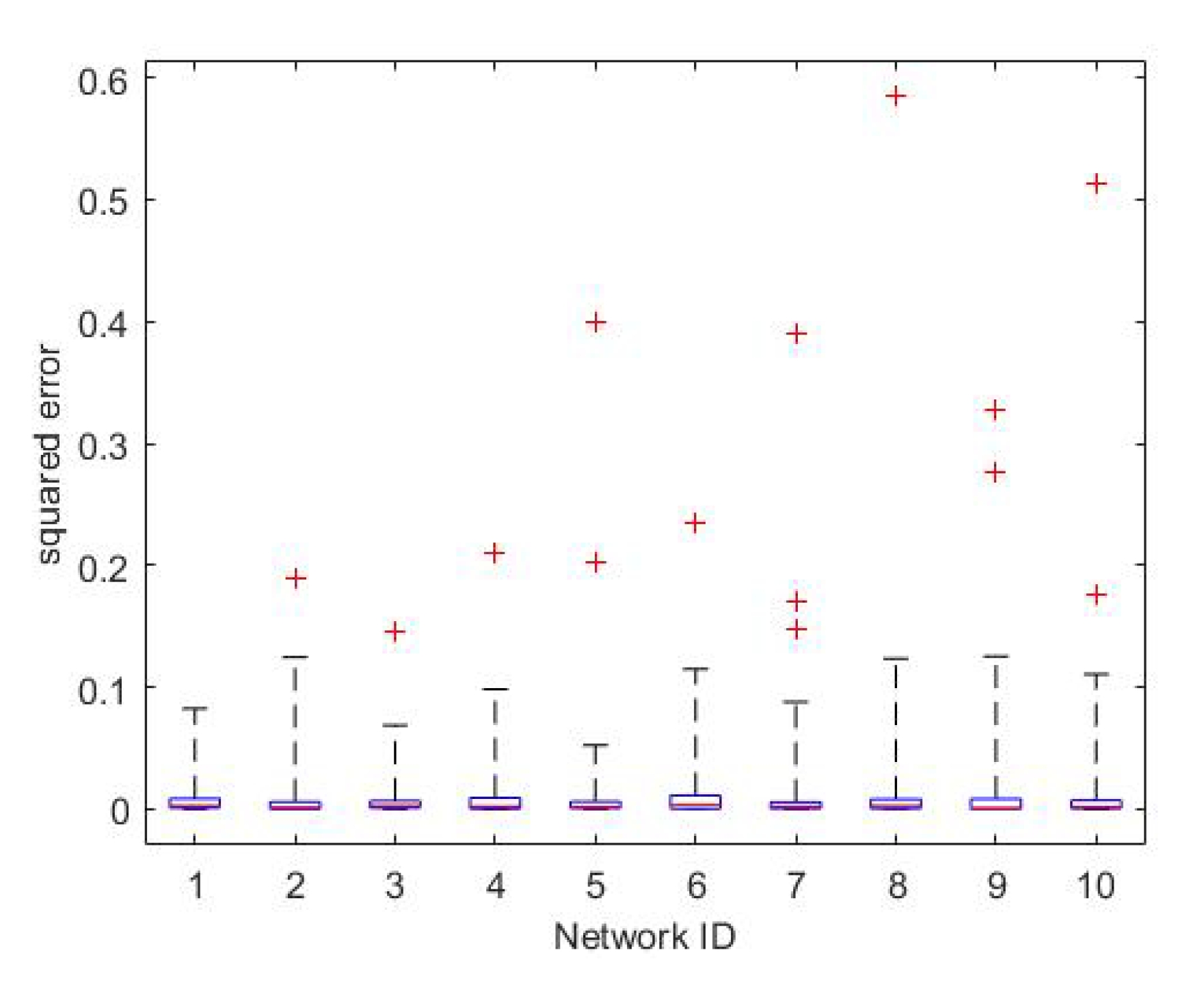
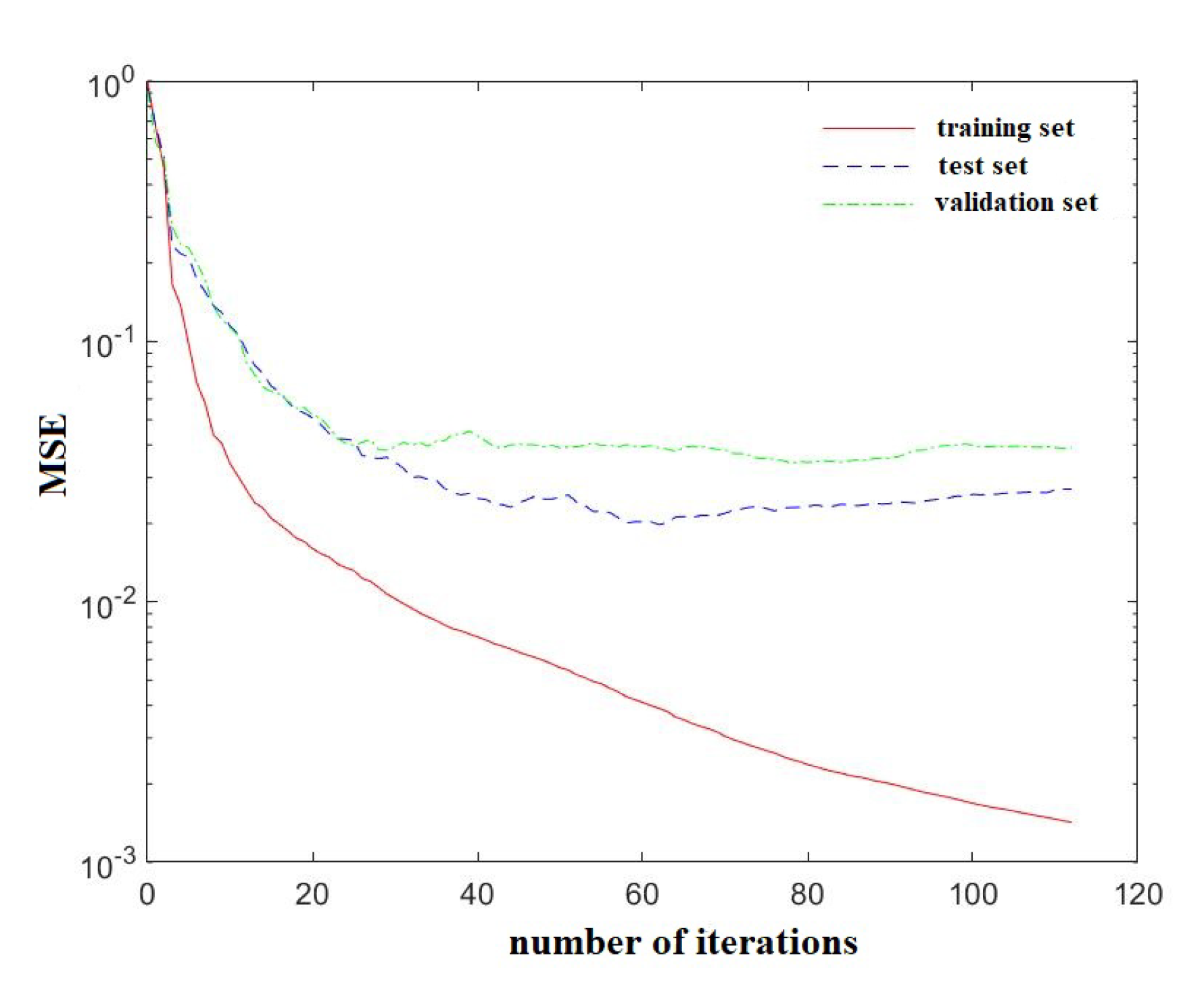
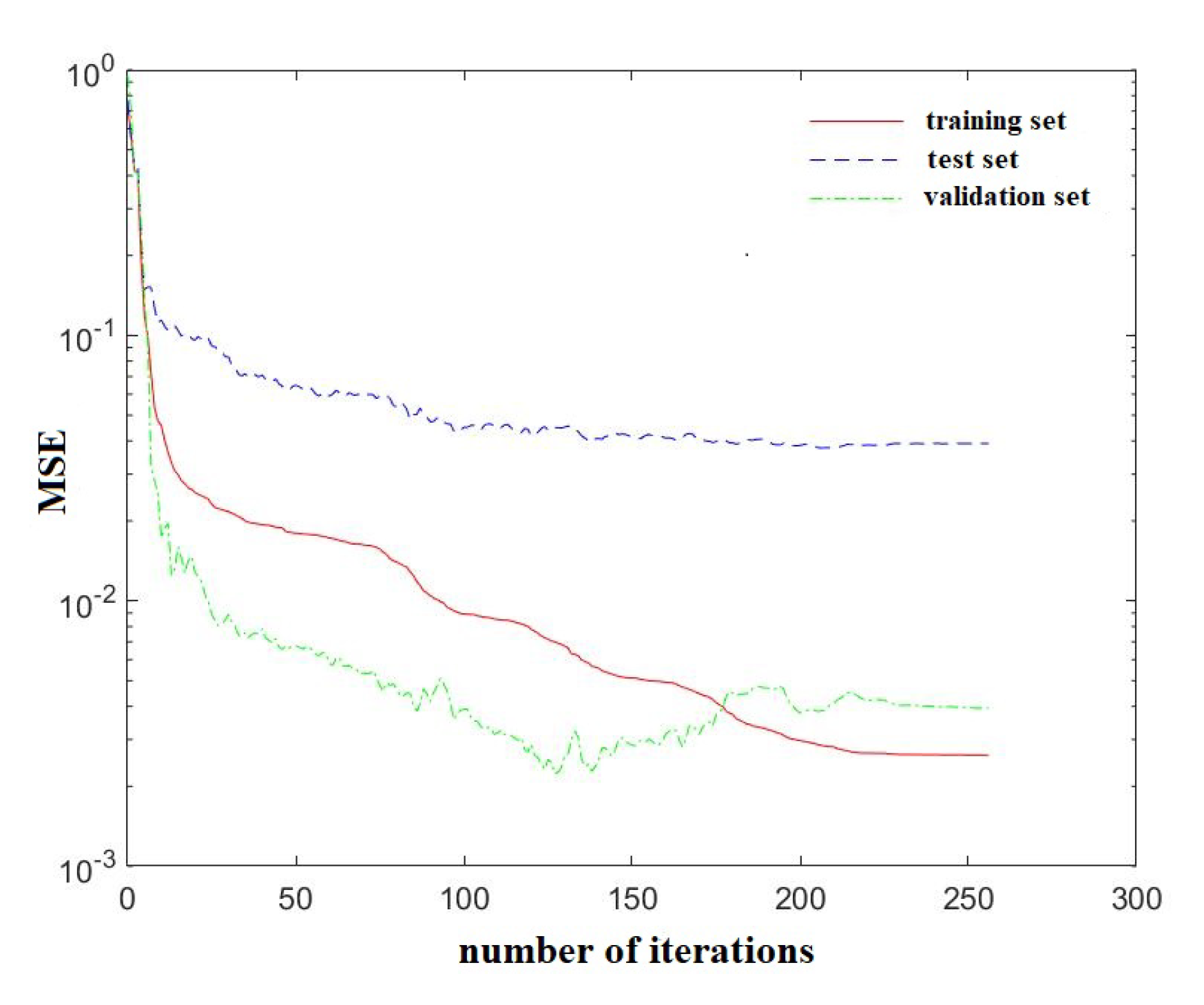
We used machine learning to train a neural network. As shown in the training result, the MSE of the neural network reaches 0.002, which is not very good for the training itself, and this may be caused by a small sample set of 112 kinds of the sample. Those kinds of samples are the statistical result from 13,608 samples. However, this error is satisfactory in application, because possibility does not require high accuracy. Nonlinear fitting and small sample learning may obtain better results, but may not change the selection of granularity.



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}