Marine Robots Mapping the Present and the Past: Unraveling the Secrets of the Deep

 ,
, 
 ,
, 
Abstract
:1. Introduction
- the design and development of a small size robust ASV for bathymetric surveys;
- design of UCH site visual and acoustic documentation methodology with an ASV, AUV, ROV and UAV. The integration of remote sensing technologies with autonomous marine vehicles made the task of site documentation even faster, more accurate, more efficient and precisely georeferenced. It includes the integration of multibeam sonar, side scan sonar and various cameras into autonomous surface and underwater vehicles, remotely operated vehicle and unmanned aerial vehicle. In total, case studies for nine UCH sites around the Mediterranean region are presented. Each case study contains a brief archaeological background of the site, the methodology of using autonomous marine vehicles and sensors for their documentation, and the results in the form of georeferenced side-scan sonar mosaics, bathymetric models or reconstructed photogrammetric models.
- a discussion of the potential of using intelligent buoys/ASVs for the purpose of underwater diver localization and augmented reality UCH site guides, and
- a discussion of the UCH site documentation and preservation transgression from physical (in situ) to the virtual reality realm.
2. Prior Work
3. Equipment
3.1. Autonomous Surface Vehicle
Multibeam Sonar
3.2. Autonomous Underwater Vehicle
Side-Scan Sonar
3.3. Remotely Operated Vehicle
3.4. Unmanned Aerial Vehicle
4. Data Acquisition and Processing Pipeline
4.1. Multibeam Sonar Data
4.2. Side-Scan Sonar Data
4.3. Visual Data
5. Results
5.1. Caesarea Maritima
5.1.1. Methodology
5.1.2. Results
5.1.3. Discussion
5.2. Baiae Site
5.2.1. Methodology
5.2.2. Results
5.2.3. Discussion
5.3. Cavtat Sites
5.3.1. Merchant—Ancient Greek Sailing Boat with Dolii
5.3.2. Amphorae Cage
5.3.3. Methodology
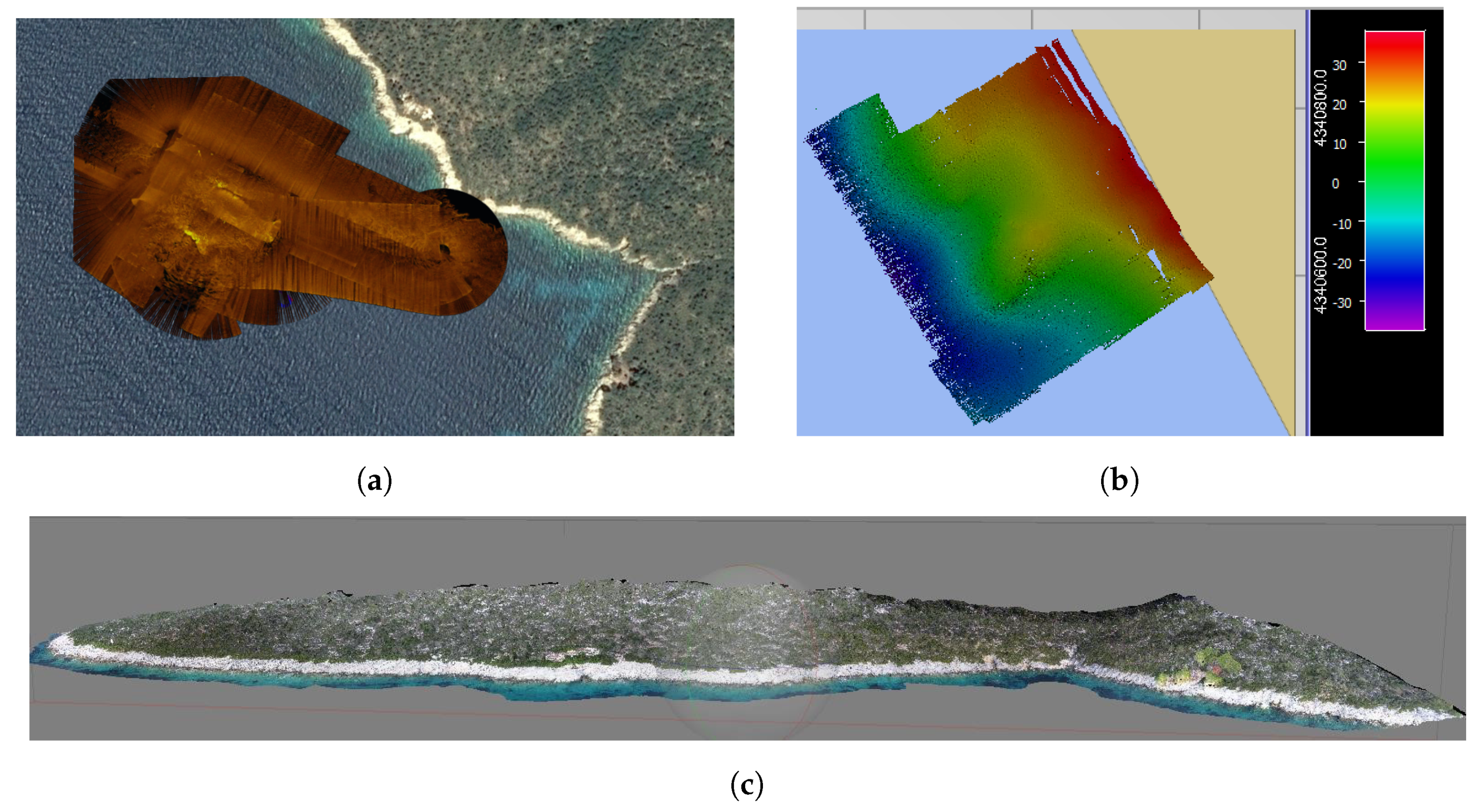
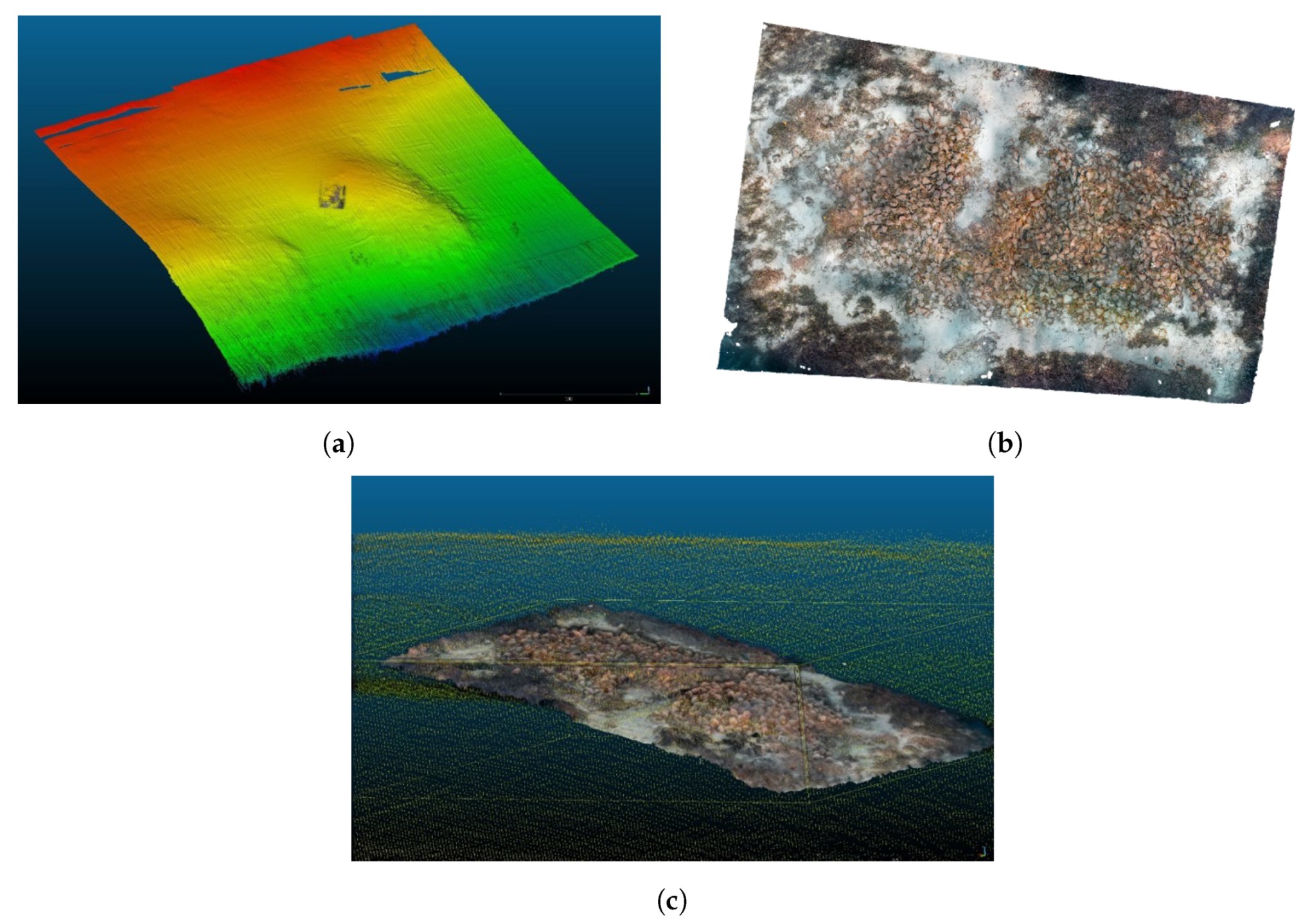
5.3.4. Results
5.3.5. Discussion
5.4. Western Pagaseticos Sites
5.4.1. Alonissos—Peristera Shipwreck
5.4.2. Kikinthos Shipwreck—West Pagasetic Gulf
5.4.3. Akra—Glaros Shipwreck
5.4.4. Telegrafos Shipwreck
5.4.5. Discussion
5.5. Szent Istvan Shipwreck
5.5.1. Methodology
5.5.2. Bathymetry Survey Results
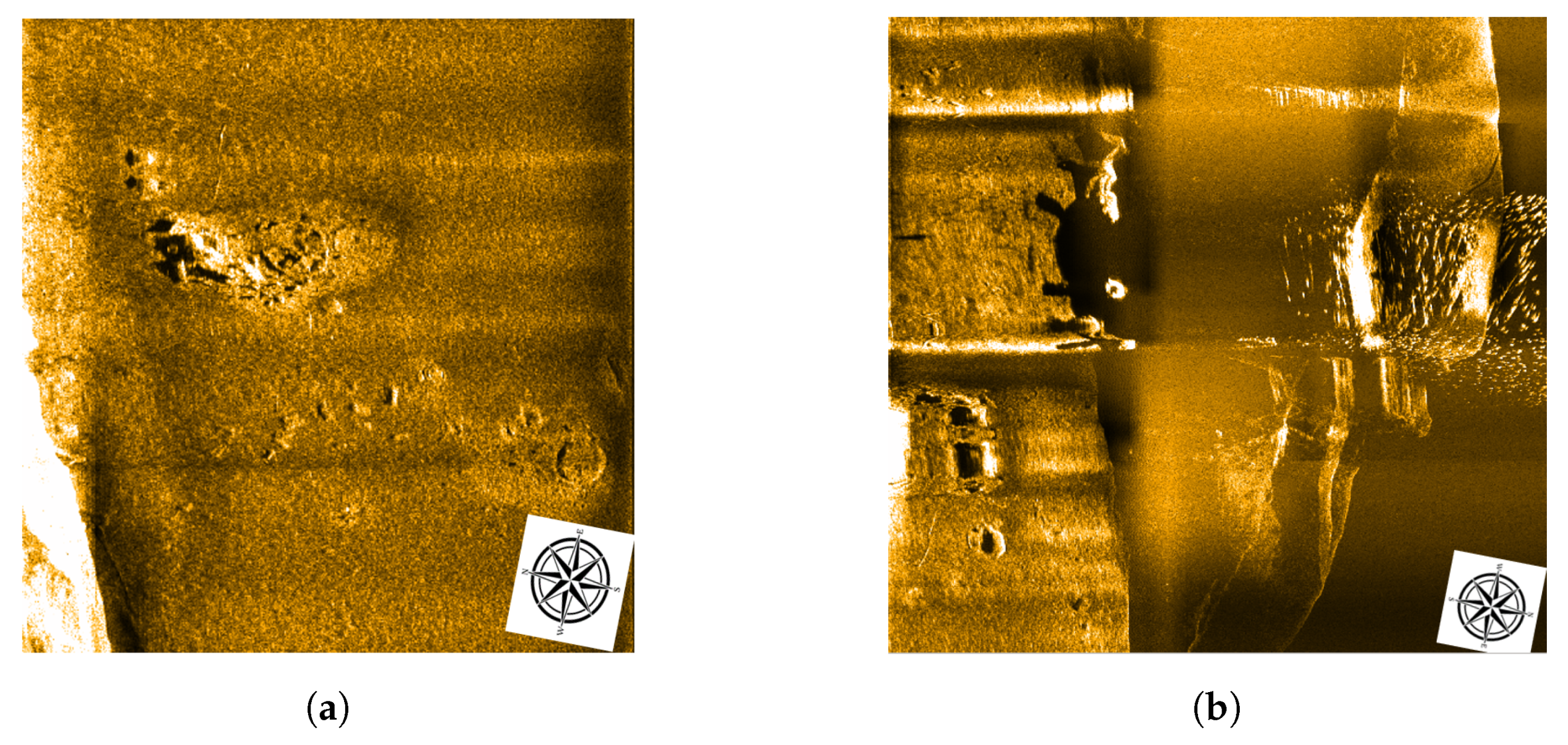
5.5.3. Side-Scan Sonar Survey Results
- M1—Mission along and over the ship. Shooting depth 35 m 6 October 2019
- M2—Mission across and next to the ship. Shooting depth 35 m 6 October 2019.
- M3—Mission north of the ship. Shooting depth 15 m from the bottom 6 November 2019.
- M4—Mission around the ship. Shooting depth 10 m from the bottom 6 November 2019.
- M5—Mission over a ship with sidescan sonar and camera. Shooting depth 40 m 6 November 2019
- M6—Mission over a ship with sidescan sonar and camera. Shooting depth 44 m 6 November 2019
5.5.4. AUV’s Visual Inspection Results
6. Discussion
7. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Abbreviations
| 2.5D | 2.5-dimensional |
| AHE | Adaptive histogram equalization algorithm |
| AR | Augmented reality |
| ASV | Autonomous surface vehicle |
| AUV | Autonomous underwater vehicle |
| CLAHE | Contrast-limited adaptive histogram equalization algorithm |
| DSLR | Digital single-lens reflex camera |
| DVL | Doppler velocity logger |
| ESC | Electronic speed control |
| FXTI | Fathom-X tether interface |
| GPS | Global Positioning System |
| GSM | Global System for Mobile Communications |
| GUI | Graphical user interface |
| HF | High frequency |
| IMU | Inertial measurement unit |
| LABUST | Laboratory for Underwater Systems and Technologies |
| LAUV | Lightweight autonomous underwater vehicle |
| LF | Low frequency |
| LSTS | Laboratório de Sistemas e Tecnologia Subaquática |
| MBES | Multibeam echosounder |
| PlaDyBath | Platform for dynamic bathymetry |
| PlaDyPos | Platform for dynamic positioning |
| POI | Point of interest |
| ROS | Robot operating system |
| ROV | Remotely operated vehicle |
| SBL | Short baseline |
| SLAM | Simultaneous localization and mapping |
| SSS | Side-scan sonar |
| UAV | Unmanned aerial vehicle |
| UCH | Underwater cultural heritage |
| UNICAL | University of Calabria |
| UNIZG-FER | University of Zagreb Faculty of Electrical Engineering and Computing |
| USBL | Ultra-short baseline |
| VR | Virtual reality |
References
- Gracias, N.; Ridao, P.; Garcia, R.; Escartín, J.; L’Hour, M.; Cibecchini, F.; Campos, R.; Carreras, M.; Ribas, D.; Palomeras, N.; et al. Mapping the Moon: Using a lightweight AUV to survey the site of the 17th century ship La Lune. In Proceedings of the MTS/IEEE OCEANS, Bergen, Norway, 10–14 June 2013; pp. 1–8. [Google Scholar]
- Vasilijevic, A.; Buxton, B.; Sharvit, J.; Stilinovic, N.; Nad, D.; Miskovic, N.; Planer, D.; Hale, J.; Vukic, Z. An ASV for coastal underwater archaeology: The Pladypos survey of Caesarea Maritima, Israel. In Proceedings of the OCEANS, Genoa, Italy, 18–21 May 2015; pp. 1–7. [Google Scholar]
- McCarthy, J.; Benjamin, J.; Winton, T.; van Duivenvoorde, W. 3D Recording and Interpretation for Maritime Archaeology; Springer International Publishing: Berlin/Heidelberg, Germany, 2019. [Google Scholar]
- Bruno, F.; Miskovic, N.; Nad, D.; Kapetanovic, N.; Lagudi, A.; Aiello, R.; Lupia, M.; Cario, G. New technologies for improving the diver experience in underwater cultural sites. In Proceedings of the International Conference on Archaeology and Tourism Sense and Sustainability, Zagreb, Hrvatska, 6–10 May 2019; pp. 1–6. [Google Scholar]
- Bruno, F.; Lagudi, A.; Collina, M.; Medaglia, S.; Kalamara, S.; Kalamara, P.; Kourkoumelis, D.; Nad, D.; Kapetanovic, N.; Vasilijevic, A.; et al. Opto-acoustic 3D Reconstruction and Virtual Diving on the Peristera Shipwreck. In Proceedings of the International Conference in Management of Accessible Underwater Cultural and Natural Heritage Sites: “Dive in Blue Growth”, Athens, Greece, 16–18 October 2019; pp. 1–11. [Google Scholar]
- Drap, P.; Merad, D.; Seinturier, J.; Mahiddine, A.; Peloso, D.; Boï, J.M.; Chemisky, B.; Long, L.; Garrabou, J. Underwater programmetry for archaeology and marine biology: 40 years of experience in Marseille, France. In Proceedings of the DigitalHeritage 2013—Federating the 19th Int’l VSMM, 10th Eurographics GCH, and 2nd UNESCO Memory of the World Conferences, Plus Special Sessions fromCAA, Arqueologica 2.0 et al., Marseille, France, 28 October–1 November 2013; Volume 1, pp. 97–104. [Google Scholar]
- Santagati, C.; Inzerillo, L.; Di Paola, F. Image-based modeling techniques for architectural heritage 3D digitalization: Limits and potentialities. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2013, 40, 555–560. [Google Scholar] [CrossRef] [Green Version]
- Roman, C.; Inglis, G.; Rutter, J. Application of structured light imaging for high resolution mapping of underwater archaeological sites. In Proceedings of the OCEANS 2010 Conference, Sydney, Australia, 24–27 May 2010. [Google Scholar]
- Scaradozzi, D.; Sorbi, L.; Zoppini, F.; Gambogi, P. Tools and techniques for underwater archaeological sites documentation. In Proceedings of the OCEANS 2013 Conference, San Diego, CA, USA, 23–27 May 2013; pp. 1–6. [Google Scholar]
- Mišković, N.; Bibuli, M.; Birk, A.; Caccia, M.; Egi, M.; Grammer, K.; Marroni, A.; Neasham, J.; Pascoal, A.; Vasilijević, A.; et al. CADDY—Cognitive Autonomous Diving Buddy: Two Years of Underwater Human-Robot Interaction. Mar. Technol. Soc. J. 2016, 50, 54–66. [Google Scholar] [CrossRef]
- Đula Nađ, A.; Mišković, N.; Mandić, F. Navigation, guidance and control of an overactuated marine surface vehicle. Annu. Rev. Control 2015, 40, 172–181. [Google Scholar] [CrossRef] [Green Version]
- Vasilijevic, A.; Nad, D.; Mandic, F.; Miskovic, N.; Vukic, Z. Coordinated Navigation of Surface and Underwater Marine Robotic Vehicles for Ocean Sampling and Environmental Monitoring. IEEE/ASME Trans. Mechatron. 2017, 22, 1174–1184. [Google Scholar] [CrossRef]
- Barišić, M.; Gambin, T.; Kruschel, C.; Radić Rossi, I. TRITON: The Deep Water Heritage Research Project: 2010–2011 Research Campaigns. In Proceedings of the 4th International Conference on Underwater Archaeology (IKUWA), Zadar, Croatia, 29 September–2 November 2011. [Google Scholar]
- Radić Rossi, I.; Nicolardi, M.; Batur, K. The Gnnalić shipwreck: Microcosm of the Late Renaissance world. In Proceedings of the Croatia at the Crossroads Conference, London, UK, 24–25 June 2013. [Google Scholar]
- Lončar, I.; Babić, A.; Arbanas, B.; Vasiljević, G.; Petrović, T.; Bogdan, S.; Mišković, N. A Heterogeneous Robotic Swarm for Long-Term Monitoring of Marine Environments. Appl. Sci. 2019, 9, 1388. [Google Scholar] [CrossRef] [Green Version]
- Barisic, M.; Nad, D.; Vasilijevic, A. Texture Segmentation Applied to P. Oceanica Beds’ Upper Boundary Tracking byROVs. IFAC Proc. Vol. 2012, 45, 318–324. [Google Scholar] [CrossRef] [Green Version]
- Miskovic, N.; Bogdan, S.; Petrovic, I.; Vukic, Z. Cooperative control of heterogeneous robotic systems. In Proceedings of the 37th International Convention on Information and Communication Technology, Electronics and Microelectronics (MIPRO), Opatija, Croatia, 26–30 May 2014; pp. 982–986. [Google Scholar]
- Ðula, N.; Walker, C.; Kvasic´, I.; Antillon, D.O.; Miškovic´, N.; Anderson, I.; Loncˇar, I. Towards Advancing Diver-Robot Interaction Capabilities. IFAC-PapersOnLine 2019, 52, 199–204. [Google Scholar]
- Kvasić, I.; Mišković, N.; Vukić, Z. Convolutional Neural Network Architectures for Sonar-Based Diver Detection and Tracking. In Proceedings of the OCEANS, Marseille, France, 26–30 May 2019; pp. 1–6. [Google Scholar]
- Babić, A.; Mandić, F.; Vasiljević, G.; Mišković, N. Autonomous docking and energy sharing between two types of robotic agents. IFAC-PapersOnLine 2018, 51, 406–411. [Google Scholar] [CrossRef]
- Kapetanović, N.; Mišković, N.; Tahirović, A. Saliency and Anomaly: Transition of Concepts from Natural Images to Side-Scan Sonar Images. In Proceedings of the 21st IFAC World Congress, Berlin, Germany, 12–17 July 2020. [Google Scholar]
- Babić, A.; Mišković, N.; Vukić, Z. Heuristics pool for hyper-heuristic selection during task allocation in a heterogeneous swarm of marine robots. IFAC-PapersOnLine 2018, 51, 412–417. [Google Scholar] [CrossRef]
- Kapetanović, N.; Mišković, N.; Tahirović, A.; Bibuli, M.; Caccia, M. A side-scan sonar data-driven coverage planning and tracking framework. Annu. Rev. Control 2018, 46, 268–280. [Google Scholar] [CrossRef]
- Kapetanović, N.; Mišković, N.; Tahirović, A. Information Gain-Guided Online Coverage Path Planning for Side-Scan Sonar Survey Missions. In Proceedings of the 26th Mediterranean Conference on Control and Automation (MED), Zadar, Croatia, 19–22 June 2018; pp. 1–9. [Google Scholar]
- Kapetanović, N.; Mišković, N.; Tahirović, A. Side-Scan Sonar Data-Driven Coverage Path Planning: A Comparison of Approaches. In Proceedings of the MTS/IEEE OCEANS’19 Marseille Conference and Exhibit, Marseille, France, 17–20 June 2019; pp. 1–6. [Google Scholar]
- Mandić, F.; Mišković, N.; Lončar, I. Underwater Acoustic Source Seeking Using Time-Difference-of-Arrival Measurements. IEEE J. Ocean Eng. 2019, 45, 759–771. [Google Scholar] [CrossRef]
- Kapetanović, N.; Nađ, Đ.; Mišković, N.; Vukić, Z. Towards Enhancing the Navigational Accuracy of UUVs Through Collaboration of Multiple Heterogeneous Marine Vehicles. In Proceedings of the IEEE/OES Autonomous Underwater Vehicle Workshop (AUV), Porto, Portugal, 6–9 November 2018. [Google Scholar]
- Miskovic, N.; Nad, D.; Rendulic, I. Tracking Divers: An Autonomous Marine Surface Vehicle to Increase Diver Safety. IEEE Robot. Autom. Mag. 2015, 22, 72–84. [Google Scholar] [CrossRef]
- Vasilijevic, A.; Nad, D.; Miskovic, N. Autonomous Surface Vehicles as Positioning and Communications Satellites for the Marine Operational Environment—Step toward Internet of Underwater Things. In Proceedings of the IEEE 8th International Conference on Underwater System Technology: Theory and Applications (USYS), Wuhan, China, 1–3 December 2018; pp. 1–5. [Google Scholar]
- Djapic, V.; Nad, D. Using collaborative Autonomous Vehicles in Mine Countermeasures. In Proceedings of the OCEANS 2010 Conference, Sydney, Australia, 24–27 May 2010; pp. 1–7. [Google Scholar]
- Miskovic, N.; Nad, D.; Stilinovic, N.; Vukic, Z. Guidance and control of an overactuated autonomous surface platform for diver tracking. In Proceedings of the 21st Mediterranean Conference on Control and Automation, Chania, Greece, 25–28 June 2013; pp. 1280–1285. [Google Scholar]
- Pizer, S.M.; Johnston, R.E.; Ericksen, J.P.; Yankaskas, B.C.; Muller, K.E. Contrast-limited adaptive histogram equalization: Speed and effectiveness. In Proceedings of the First Conference on Visualization in Biomedical Computing, Atlanta, GA, USA, 22–25 May 1990; pp. 337–345. [Google Scholar]
- Kapetanović, N.; Vasilijević, A.; Zubčić, K. Assessing the current state of a shipwreck using an autonomous marine robot: Szent Istvan case study. In Proceedings of the 17th International Conference on Distributed Computing and Artificial Intelligence (DCAI), L’Aquila, Italy, 7–10 October 2020; pp. 1–10. [Google Scholar]
- Raban, A. The Herodian harbor of Caesarea Maritima. In The Maritime Holy Land, Mediterranean Civilization in Ancient Israel From the Bronze Age to the Crusades; The Israeli Exhibition: Genoa, Italy, 1992; pp. 72–79. [Google Scholar]
- Boyce, J.I.; Reinhardt, E.G.; Raban, A.; Pozza, M.R. Marine Magnetic Survey of a Submerged Roman Harbour, Caesarea Maritima, Israel. Int. J. Naut. Archaeol. 2004, 33, 122–136. [Google Scholar] [CrossRef]
- Mandić, D.; Milanković, G.; Klarić, A. A Protected Subaqueous Site S.M.S. Szent Istvan the Austro-Hungarian Tegettoff Class Battleship; Povijesni Muzej: Istre-Pula, Croatia, 2001; p. 118. [Google Scholar]
- Hummel, R. Image enhancement by histogram transformation. Comput. Graph. Image Process. 1977, 6, 184–195. [Google Scholar] [CrossRef]







































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Center Frequencies (fc): | 400 KHz LF and 775 KHz HF |
| Transmit Pulse: | Wideband Chirp; 1, 2, 4, 8 msec |
| Sonar Range: | 15, 20, 30, 40, 50, 60, 75, 100, 125, 150, 175, 200 m |
| Across Track Resolution: | varies with pulse length—1.2 cm, 2.4 cm, 4.8 cm, 9.6 cm, 19.2 cm |
| Horizontal Beamwidth @fc: | 0.34 degrees (LF and HF) |
| Maximum Range: | 100 @ HF; 200 m @ LF (conditions permitting) |
| Depth Limit: | 300 m |
| Local Data Storage Optional: | Dual Frequency: Max is 6.7 GB/h; Min is 0.4 GB/h. Single Frequency: Max is 3.4 GB/h; Min is 0.2 GB/h |
| Operating Temperature: | −2–50 °C [28–122 °F] |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kapetanović, N.; Vasilijević, A.; Nađ, Đ.; Zubčić, K.; Mišković, N. Marine Robots Mapping the Present and the Past: Unraveling the Secrets of the Deep. Remote Sens. 2020, 12, 3902. https://doi.org/10.3390/rs12233902
Kapetanović N, Vasilijević A, Nađ Đ, Zubčić K, Mišković N. Marine Robots Mapping the Present and the Past: Unraveling the Secrets of the Deep. Remote Sensing. 2020; 12(23):3902. https://doi.org/10.3390/rs12233902
Chicago/Turabian StyleKapetanović, Nadir, Antonio Vasilijević, Đula Nađ, Krunoslav Zubčić, and Nikola Mišković. 2020. "Marine Robots Mapping the Present and the Past: Unraveling the Secrets of the Deep" Remote Sensing 12, no. 23: 3902. https://doi.org/10.3390/rs12233902
APA StyleKapetanović, N., Vasilijević, A., Nađ, Đ., Zubčić, K., & Mišković, N. (2020). Marine Robots Mapping the Present and the Past: Unraveling the Secrets of the Deep. Remote Sensing, 12(23), 3902. https://doi.org/10.3390/rs12233902