On the Contribution of Satellite Altimetry-Derived Water Surface Elevation to Hydrodynamic Model Calibration in the Han River

 ,
,  , , , and
, , , and
Abstract
:1. Introduction
2. Materials and Methods
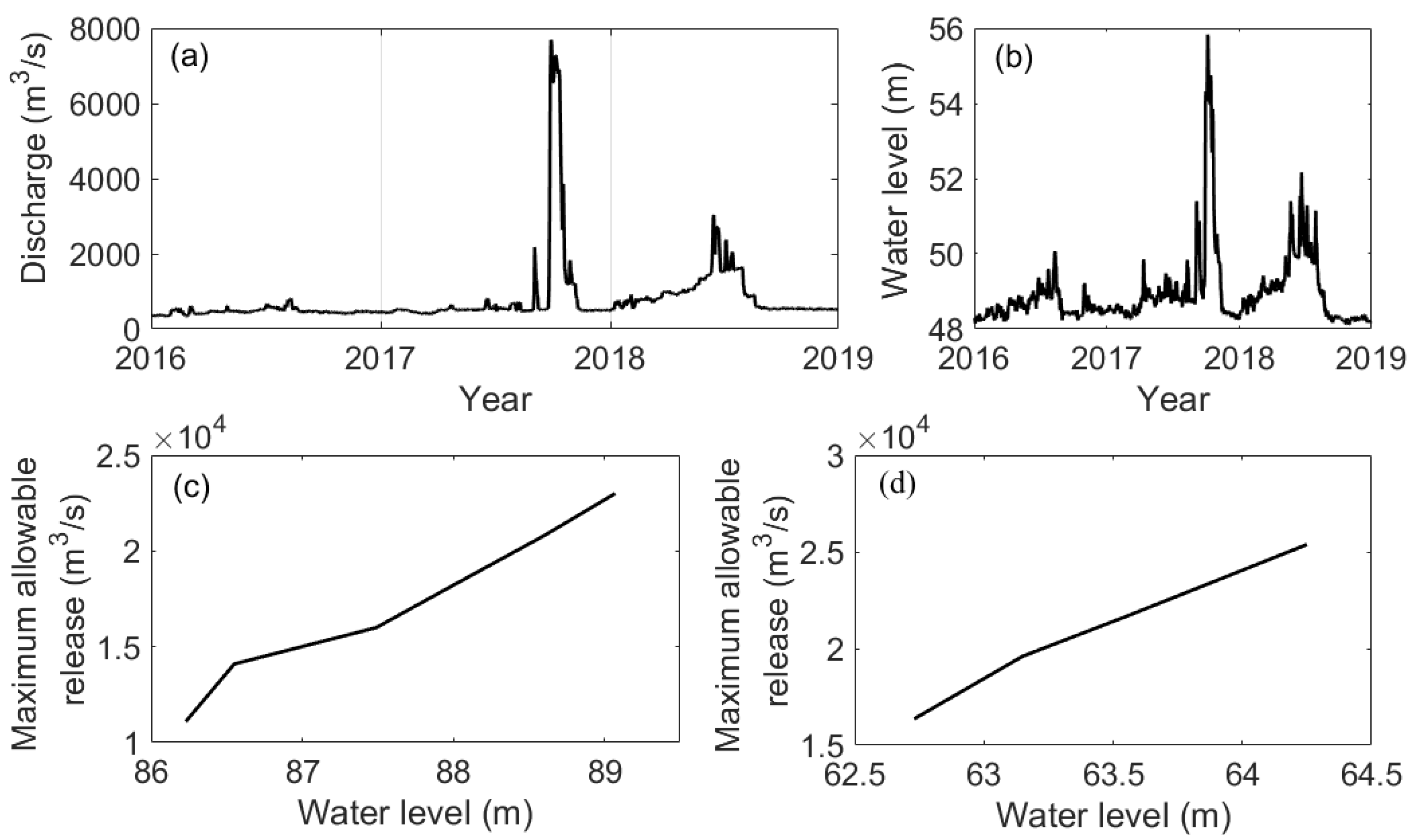
2.1. Study Area
2.2. Data Description
2.2.1. Hydrometric Data
2.2.2. Satellite Altimetry Data
2.3. WSE Data Processing
2.4. Hydrodynamic Model in the Study Area
2.5. Hydrodynamic Model Calibration
3. Results
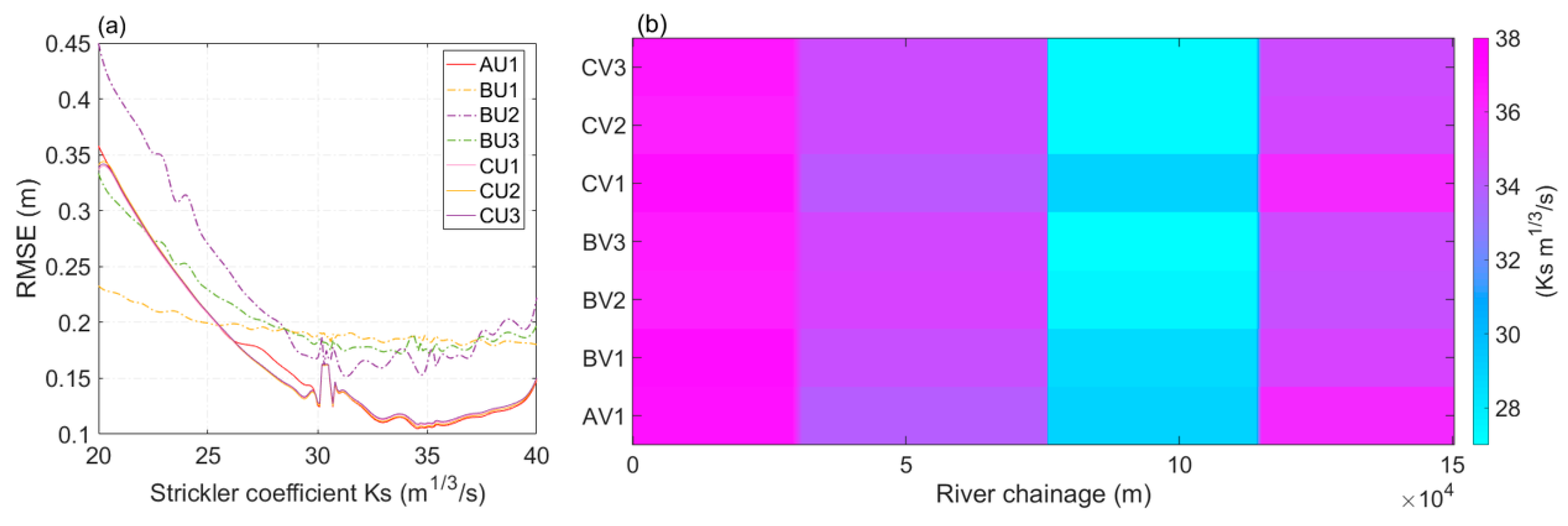
3.1. Calibrated Strickler Coefficient Ks
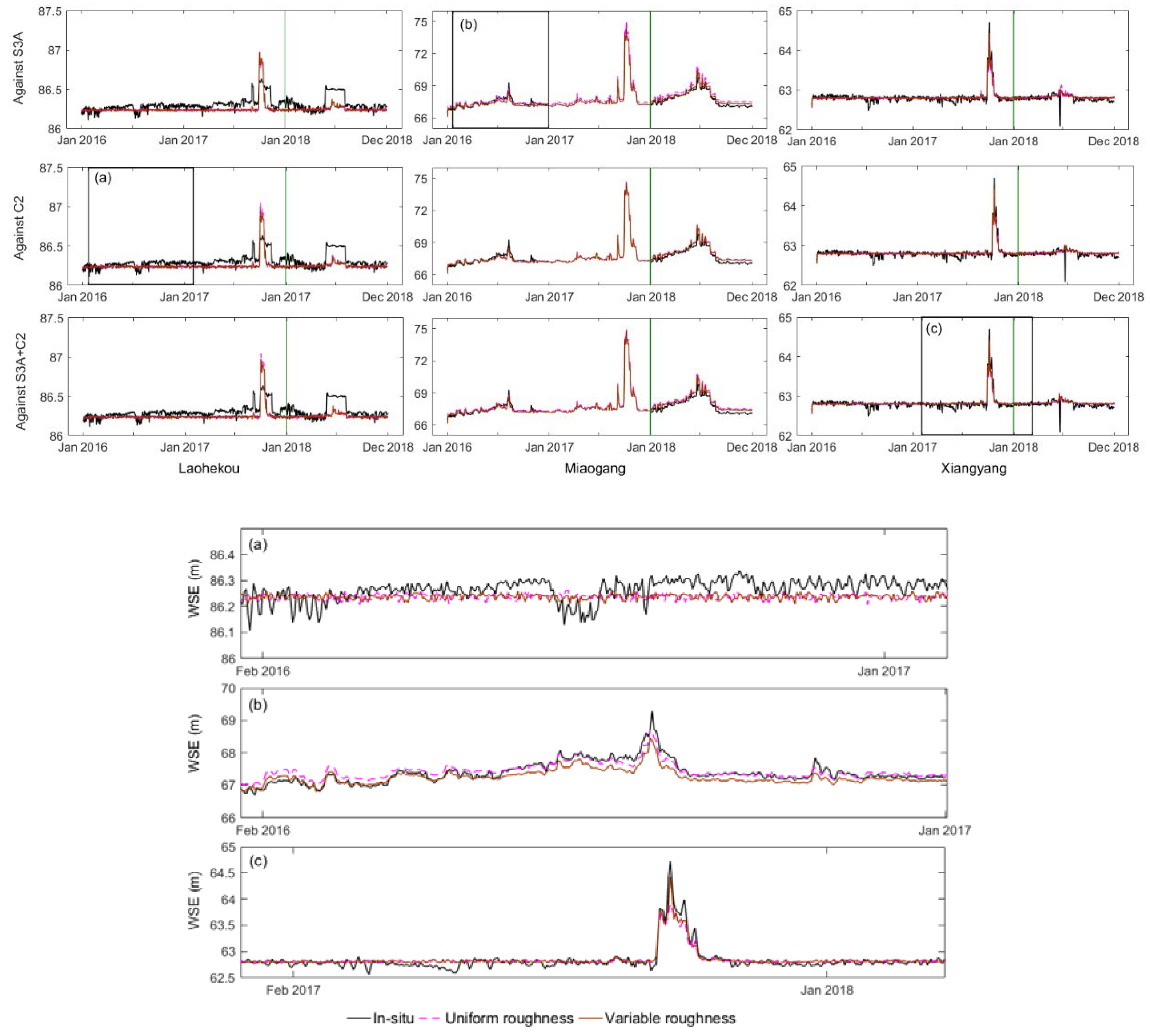
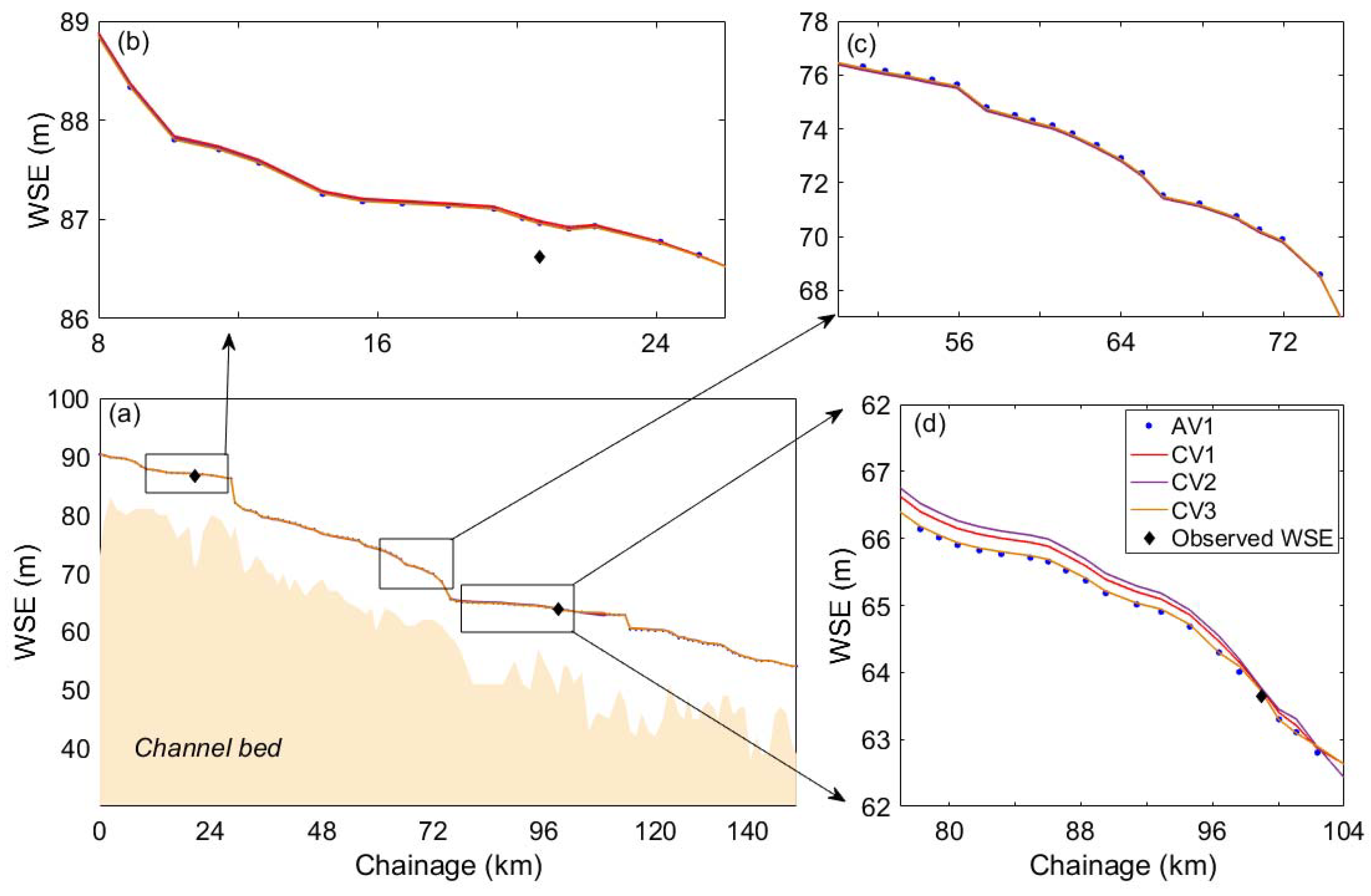
3.2. Hydrodynamic Model Performances with Different Configurations
3.2.1. Model Calibration with the in-situ Observations
3.2.2. Model Calibration with the Satellite Altimetry-derived Observations
3.2.3. Model Calibration with Both In-Situ and Satellite Altimetry-Derived Observations
4. Discussion
4.1. Effects of Satellite Altimetry-Derived WSE on Hydrodynamic Model Calibration
4.2. Comparison of Model Performance from Uniform and Variable Roughness Parameters
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Mann, M.E.; Rahmstorf, S.; Kornhuber, K.; Steinman, B.A.; Miller, S.K.; Coumou, D. Influence of Anthropogenic climate change on planetary wave resource and extreme weather events. Sci. Rep. 2017, 7, 45242. [Google Scholar] [CrossRef] [Green Version]
- Yin, J.; Gentine, P.; Zhou, S.; Sullivan, S.C.; Wang, R.; Zhang, Y.; Guo, S. Large increase in global storm runoff extremes driven by climate and anthropogenic changes. Nat. Commun. 2018, 9, 4389. [Google Scholar] [CrossRef] [Green Version]
- Blari, P.; Buytaert, W. Socio-hydrological modelling: A review asking “why, what and how?”. Hydrol. Earth Syst. Sci. 2016, 20, 443–478. [Google Scholar] [CrossRef] [Green Version]
- Jiang, L.; Bandini, F.; Smith, O.; Jensen, I.K.; Bauer-Gottwein, P. The value of distributed high-resolution UAV-Borne observations of water surface elevation for river management and hydrodynamic modeling. Remote Sens. 2020, 12, 1171. [Google Scholar] [CrossRef] [Green Version]
- Normandin, C.; Frappart, F.; Diepkilé, A.T.; Marieu, V.; Mougin, E.; Blarel, F.; Lubac, B.; Braquet, N.; Ba, A. Evaluation of the performance of radar altimetry missions from ERS-2 to Sentinel-3A over the Inner Niger Delta. Remote Sens. 2018, 10, 833. [Google Scholar] [CrossRef] [Green Version]
- Hossain, F.; Maswood, M.; Siddique-E-Akbor, A.H.; Yigzaw, W.; Mazumdar, L.C.; Ahmed, T.; Hossain, M.; Shah-Newaz, S.M.; Limaye, A.; Lee, H.; et al. A promising radar altimetry satellite system for operational flood forecasting in flood-prone Bangladesh. IEEE Geosci. Remote Sens. Mag. 2014, 2, 27–36. [Google Scholar] [CrossRef]
- Kittel, C.M.M.; Jiang, L.; To, C.; Bauer-Gottwein, P. Sentinel-3 radar altimetry for river monitoring—A catchment-scale evaluation of satellite water surface elevation from Sentinel-3A and Sentinel-3B. Hydrol. Earth Syst. Sci. Discuss. 2020, 165. [Google Scholar] [CrossRef]
- Biancamaria, S.; Hossain, F.; Lettenmaier, D.P. Forecasting transboundary river water elevations from space. Geophys. Res. Lett. 2011, 38, 1–5. [Google Scholar] [CrossRef] [Green Version]
- Da Silva, J.S.; Calmant, S.; Seyler, F.; Moreira, D.M.; Oliveira, D.; Monteiro, A. Radar altimetry aids managing gauge networks. Water Resour. Manag. 2014, 28, 587–603. [Google Scholar] [CrossRef]
- Tauro, F.; Selker, J.; van de Giesen, N.; Abrate, T.; Uijlenhoet, R.; Porfiri, M.; Manfreda, S.; Caylor, K.; Moramarco, T.; Benveniste, J.; et al. Measurements and observations in the XXI century (MOXXI): Innovation and multi-disciplinarily to sense the hydrological cycle. Hydrol. Earth Syst. Sci. 2018, 63, 169–196. [Google Scholar] [CrossRef] [Green Version]
- Siddique-E-Akbor, A.H.M.; Hossain, F.; Lee, H.; Shum, C.K. Inter-comparison study of water level estimates derived from hydrodynamic-hydrologic model and satellite altimetry for a complex deltaic environment. Remote Sens. Environ. 2011, 115, 1522–1531. [Google Scholar] [CrossRef]
- García-Pintado, J.; Neal, J.C.; Mason, D.C.; Dance, S.L.; Bates, P.D. Scheduling satellite-based SAR acquisition for sequential assimilation of water level observations into flood modelling. J. Hydrol. 2013, 495, 252–266. [Google Scholar] [CrossRef] [Green Version]
- Tarpanelli, A.; Brocca, L.; Melone, F.; Moramarco, T. Hydraulic modelling calibration in small rivers by using coarse resolution synthetic aperture radar imagery. Hydrol. Process. 2013, 27, 1321–1330. [Google Scholar] [CrossRef]
- de Moraes Frasson, R.P.; Wei, R.; Durand, M.; Minear, J.T.; Domeneghetti, A.; Schumann, G.; Williams, B.A.; Rodriguez, E.; Picamilh, C.; Lion, C.; et al. Automated river reach definition strategies: Applications for the surface water and ocean topography mission. Water Resour. Res. 2017, 53, 8164–8186. [Google Scholar] [CrossRef]
- Hostache, R.; Matgen, P.; Schumann, G.; Puech, C.; Hoffmann, L.; Pfister, L. Water level estimation and reduction of hydraulic model calibration uncertainties using satellite SAR images of floods. IEEE Trans. Geosci. Remote Sens. 2009, 47, 431–441. [Google Scholar] [CrossRef]
- Birkinshaw, S.J.; O’Donnell, G.M.; Moore, P.; Kilsby, C.G.; Fowler, H.J.; Berry, P.A.M. Using satellite altimetry data to augment flow estimation techniques on the Mekong River. Hydrol. Process. 2010, 24, 3811–3825. [Google Scholar] [CrossRef]
- Michailovsky, C.I.; Milzow, C.; Bauer-Gottwein, P. Assimilation of radar altimetry to a routing model of the Brahmaputra River. Water Resour. Res. 2013, 49, 4807–4816. [Google Scholar] [CrossRef]
- Schneider, R.; Godiksen, P.N.; Villadsen, H.; Madsen, H.; Bauer-Gottwein, P. Application of CryoSat-2 altimetry data for river analysis and modelling. Hydrol. Earth Syst. Sci. 2017, 21, 751–764. [Google Scholar] [CrossRef] [Green Version]
- Biancamaria, S.; Frappart, F.; Leleu, A.-S.; Marieu, V.; Blumstein, D.; Desjonquères, J.-D.; Boy, F.; Sottolichio, A.; Valle-Levinson, A. Satellite radar altimetry water elevations performance over a 200 m wide river: Evaluation over the Garonne River. Adv. Space Res. 2017, 59, 128–146. [Google Scholar] [CrossRef] [Green Version]
- Birkinshaw, S.J.; Moore, P.; Kilsby, C.G.; O’Donnell, G.M.; Hardy, A.J.; Berry, P.A.M. Daily discharge estimation at ungauged river sites using remote sensing. Hydrol. Process. 2014, 28, 1043–1054. [Google Scholar] [CrossRef]
- Sulistioadi, Y.B.; Tseng, K.H.; Shum, C.K.; Hidayat, H.; Sumaryono, M.; Suhardiman, A.; Setiawan, F.; Sunarso, S. Satellite radar altimetry for monitoring small rivers and lakes in Indonesia. Hydrol. Earth Syst. Sci. 2015, 19, 341–359. [Google Scholar] [CrossRef] [Green Version]
- Ablain, M.; Meyssignac, B.; Zawadzki, L.; Jugier, R.; Ribes, A.; Spada, G.; Benveniste, J.; Cazenave, A.; Picot, N. Uncertainty in satellite estimates of global mean sea-level changes, trend and acceleration. Earth Syst. Sci. Data 2019, 11, 1189–1202. [Google Scholar] [CrossRef] [Green Version]
- Goumehei, E.; Tolpekin, V.; Stein, A.; Yan, W. Surface water body detection in polarimetric SAR data using contextual complex Wishart classification. Water Resour. Res. 2019, 55, 7047–7059. [Google Scholar] [CrossRef] [Green Version]
- Weekley, D.; Li, X. Tracking multidecadal lake water dynamics with Landsat imagery and topography/bathymetry. Water Resour. Res. 2019, 55, 8350–8367. [Google Scholar] [CrossRef]
- Haque, M.M.; Seidou, O.; Mohammadian, A.; Djibo, A.G. Development of a time-varying MODIS/2D hydrodynamic model relationship between water levels and flooded areas in the Inner Niger Delta, Mali, West Africa. J. Hydrol. Reg. Stud. 2020, 30, 100703. [Google Scholar] [CrossRef]
- Mtamba, J.; Van der Velde, R.; Ndomba, P.; Zoltán, V.; Mtalo, F. Use of Radarsat-2 and Landsat TM images for spatial parameterization of Manning’s roughness coefficient in hydraulic modeling. Remote Sens. 2015, 7, 836–864. [Google Scholar] [CrossRef] [Green Version]
- Paiva, R.C.D.; Collischonn, W.; Buarque, D.C. Validation of a full hydrodynamic model for large-scale hydrologic modelling in the Amazon. Hydrol. Process. 2011, 27, 333–346. [Google Scholar] [CrossRef]
- Chen, H.; Liang, Z.; Liu, Y.; Liang, Q.; Xie, S. Integrated remote sensing imagery and two-dimensional hydraulic modeling approach for impact evaluation of flood on crop yields. J. Hydrol. 2017, 553, 262–275. [Google Scholar] [CrossRef] [Green Version]
- Andreadis, K.M. Data assimilation and river hydrodynamic modeling over large scales. In Global Flood Hazard: Applications in Modeling, Mapping, and Forecasting; American Geophysical Union: Washington, DC, USA, 2018. [Google Scholar] [CrossRef]
- Domeneghetti, A.; Tarpanelli, A.; Brocca, L.; Barbetta, S.; Moramarco, T.; Castellarin, A.; Brath, A. The use of remote sensing-derived water surface data for hydraulic model calibration. Remote Sens. Environ. 2014, 149, 130–141. [Google Scholar] [CrossRef]
- Dettmering, D.; Ellenbeck, L.; Scherer, D.; Schwatke, C.; Niemann, C. Potential and limitations of satellite altimetry constellations for monitoring surface water storage changes—A case study in the Mississippi Basin. Remote Sens. 2020, 12, 3320. [Google Scholar] [CrossRef]
- Biancamaria, S.; Lettenmaier, D.P.; Pavelsky, T.M. The SWOT mission and its capabilities for land hydrology. Surv. Geophys. 2016, 37, 307–337. [Google Scholar] [CrossRef] [Green Version]
- Garambois, P.A.; Calmant, S.; Roux, H.; Paris, A.; Monnier, J.; Finaud-Guyot, P.; Montazem, A.S.; da Silva, J.S. Hydraulic visibility: Using satellite altimetry to parameterize a hydraulic model of an ungauged reach of a braided river. Hydrol. Process. 2017, 31, 756–767. [Google Scholar] [CrossRef] [Green Version]
- Schneider, R.; Tarpanelli, A.; Nielsen, K.; Madsen, H.; Bauer-Gottwein, P. Evaluation of multi-mode CryoSat-2 altimetry data over the Po River against in situ data and a hydrodynamic model. Adv. Water Resour. 2018, 112, 17–26. [Google Scholar] [CrossRef] [Green Version]
- Liu, G.; Schwartz, F.W.; Tseng, K.-H.; Shum, C.K. Discharge and water-depth estimates for ungauged rivers: Combining hydrologic, hydraulic and inverse modeling with stage and water-area measurements from satellites. Water Resour. Res. 2015, 51, 6017–6035. [Google Scholar] [CrossRef]
- Getirana, A.C.V.; Peters-Lidard, C. Estimating water discharge from large radar altimetry datasets. Hydrol. Earth Syst. Sci. 2013, 17, 923–933. [Google Scholar] [CrossRef] [Green Version]
- Jiang, L.; Madsen, H.; Bauer-Gottwein, P. Simultaneous calibration of multiple hydrodynamic model parameters using satellite altimetry observations of water surface elevation in the Songhua River. Remote Sens. Environ. 2019, 225, 229–247. [Google Scholar] [CrossRef]
- Donlon, C.; Berruti, B.; Buongiorno, A.; Ferreira, M.-H.; Féménias, P.; Frerick, J.; Goryl, P.; Klein, U.; Laur, H.; Mavrocordatos, C.; et al. The global monitoring for environment and security (GMES) Sentinel-3 mission. Remote Sens. Environ. 2012, 120, 37–57. [Google Scholar] [CrossRef]
- Jiang, L.; Schneider, R.; Andersen, O.B.; Bauer-Gottwein, P. CryoSat-2 altimetry applications over rivers and lakes. Water 2017, 9, 211. [Google Scholar] [CrossRef]
- Jiang, L.; Nielsen, K.; Andersen, O.B.; Bauer-Gottwein, P. CryoSat-2 radar altimetry for monitoring freshwater resources of China. Remote Sens. Environ. 2017, 200, 125–139. [Google Scholar] [CrossRef] [Green Version]
- Wingham, D.J.; Francis, C.R.; Baker, S.; Bouzinac, C.; Brockley, D.; Cullen, R.; de Chateau-Thierry, P.; Laxon, S.W.; Mallow, U.; Mavrocordatos, C.; et al. CryoSat: A mission to determine the fluctuations in Earth’s land and marine ice fields. Adv. Space Res. 2006, 37, 841–871. [Google Scholar] [CrossRef]
- Liu, D.; Guo, S.; Shao, Q.; Liu, P.; Xiong, L.; Wang, L.; Hong, X.; Xu, Y.; Wang, Z. Assessing the effects of adaptation measures on optimal water resources allocation under varied water availability conditions. J. Hydrol. 2018, 556, 759–774. [Google Scholar] [CrossRef]
- Villadsen, H.; Andersen, O.B.; Stenseng, L.; Nielsen, K.; Knudsen, P. CryoSat-2 altimetry for river level monitoring-Evaluation in the Ganges-Brahmaputra River basin. Remote Sens. Environ. 2015, 168, 80–89. [Google Scholar] [CrossRef]
- Pavlis, N.K.; Holmes, S.A.; Kenyon, S.C.; Factor, J.K. The development and evaluation of the Earth Gravitational Model 2008 (EGM2008). J. Geophys. Res. Solid Earth 2012, 117. [Google Scholar] [CrossRef] [Green Version]
- Pekel, J.-F.; Cottam, A.; Gorelick, N.; Belward, A.S. High-resolution mapping of global surface water and its long-term changes. Nature 2016, 540, 418–422. [Google Scholar] [CrossRef] [PubMed]
- ASTER GDEM Validation Team. ASTER Global DEM Validation. Summary Report; 2009; pp. 1–28. Available online: https://ssl.jspacesystems.or.jp/ersdac/GDEM/E/image/ASTERGDEM_ValidationSummaryReport_Ver1.pdf (accessed on 11 December 2020).
- Myers, E.; Hess, K.; Yang, Z.; Xu, J.; Wong, A.; Doyle, D.; Woolard, J.; White, S.; Le, B.; Gill, S.; et al. VDatum and strategies for national coverage. In Proceedings of the Ocean Conference Record (IEEE), Vancouver, BC, Canada, 29 September–4 October 2007. [Google Scholar] [CrossRef]
- DHI. MIKE 11 A Modelling System for Rivers and Channels-Reference Manual, DHI: Copenhagen, Denmark. 2015. Available online: https://manuals.mikepoweredbydhi.help/2017/Water_Resources/Mike_11_ref.pdf (accessed on 11 December 2020).
- Moramarco, T.; Singh, V.P. Formulation of the entropy parameter based on hydraulic and geometric characteristics of river cross sections. J. Hydrol. Eng. 2010, 15, 10. [Google Scholar] [CrossRef]
- Wood, M.; Hostache, R.; Neal, J.; Wagener, T.; Giustarini, L.; Chini, M.; Corato, G.; Matgen, P.; Bates, P. Calibration of channel depth and friction parameters in the LISFLOOD-FP hydraulic model using medium-resolution SAR data and identifiability techniques. Hydrol. Earth Syst. Sci. 2016, 20, 4983–4997. [Google Scholar] [CrossRef] [Green Version]
- Villadsen, H.; Deng, X.; Andersen, O.B.; Stenseng, L.; Nielsen, K.; Knudsen, P. Improved inland water levels from SAR altimetry using novel empirical and physical retrackers. J. Hydrol. 2016, 537, 234–247. [Google Scholar] [CrossRef] [Green Version]
- Boergens, E.; Buhl, S.; Dettmering, D.; Kluppelberg, C.; Seitz, F. Combination of multi-mission altimetry data along the Mekong River with spatio-temporal kriging. J. Geod. 2017, 91, 519–534. [Google Scholar] [CrossRef] [Green Version]
- Tourian, M.J.; Tarpanelli, A.; Elmi, O.; Qin, T.; Brocca, L.; Moramarco, T.; Sneeuw, N. Spatiotemporal densification of river water level time series by multimission satellite altimetry. Water Resour. Res. 2016, 52, 1140–1159. [Google Scholar] [CrossRef] [Green Version]
- Pappenberger, F.; Beven, K.; Frodsham, K.; Romanowicz, R.; Matgen, P. Grasping the unavoidable subjectivity in calibration of flood inundation models: A vulnerability weighted approach. J. Hydrol. 2007, 333, 275–287. [Google Scholar] [CrossRef]
- Tuozzolo, S.; Langhorst, T.; de Moraes Frasson, R.P.; Pavelsky, T.; Durand, M.; Schobelock, J.J. The impact of reach averaging Manning’s equation for an in-situ datasets of water surface elevation, width, and slope. J. Hydrol. 2019, 578, 123866. [Google Scholar] [CrossRef]
- Dung, N.V.; Merz, B.; Bardossy, A.; Thang, T.D.; Apel, H. Multi-objective automatic calibration of hydrodynamic models utilizing inundation maps and gauge data. Hydrol. Earth Syst. Sci. 2011, 15, 1339–1354. [Google Scholar] [CrossRef] [Green Version]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| ID | Station Name | Chainage (m) | River Width (m) | Data Type |
|---|---|---|---|---|
| 1 | Huangjiagang (HJG) | 0 | 438 | Q/W |
| 2 | Laohekou (LHK) | 20,655 | 441 | W |
| 3 | Bei (B) | 31,196 | 101 | Q |
| 4 | Gucheng (GC) | 37,867 | 182 | Q |
| 5 | Miaogang (MG) | 60,599 | 280 | W |
| 6 | Xiangyang (XY) | 98,950 | 534 | W |
| 7 | Dongcheng (DC) | 107,667 | 351 | Q |
| 8 | Yicheng (YC) | 150,379 | 650 | W |
| 9 | Wangbuzhou (WBZ) | 28,763 | 1351 | Water control project |
| 10 | Cuijiaying (CJY) | 113,819 | 1213 |
| ID | Lon (degree) | Lat (degree) | Chainage (m) | Width (m) | Number |
|---|---|---|---|---|---|
| VS Platform: CryoSat-2 | |||||
| 1 | 111.539 | 32.485 | 3681 | 1060 | 3 |
| 2 | 111.605 | 32.459 | 114,59 | 1494 | 3 |
| 3 | 111.666 | 32.401 | 193,53 | 1351 | 5 |
| 4 | 111.688 | 32.286 | 32,570 | 575 | 3 |
| 5 | 111.704 | 32.191 | 42,175 | 604 | 3 |
| 6 | 111.768 | 32.155 | 51,246 | 348 | 3 |
| 7 | 111.905 | 32.069 | 69,674 | 563 | 5 |
| 8 | 111.981 | 32.086 | 80,502 | 862 | 4 |
| 9 | 112.053 | 32.042 | 87,091 | 749 | 2 |
| 10 | 112.18 | 32.037 | 92,876 | 1290 | 3 |
| 11 | 112.194 | 31.987 | 104,022 | 1068 | 3 |
| 12 | 112.16 | 31.955 | 113,369 | 1206 | 1 |
| 13 | 112.205 | 31.907 | 121,534 | 776 | 3 |
| 14 | 112.208 | 31.857 | 129,284 | 434 | 2 |
| 15 | 112.192 | 31.772 | 140,443 | 403 | 2 |
| 16 | 112.241 | 31.750 | 146,961 | 571 | 4 |
| VS Platform: Sentinel-3A | |||||
| 1 | 111.579 | 32.467 | 7654 | 775 | 36 |
| 2 | 112.109 | 32.025 | 94,622 | 1253 | 38 |
| Scenarios Design | Using In-Situ | Using Sentinel-3A | Using CryoSat-2 | |
|---|---|---|---|---|
| Configuration A: using in-situ data (two schemes) | ||||
| AU1 | AV1 | Y | - | - |
| Configuration B: using satellite altimetry data (six schemes) | ||||
| BU1 | BV1 | - | Y | - |
| BU2 | BV2 | - | - | Y |
| BU3 | BV3 | - | Y | Y |
| Configuration C: using both in-situ and satellite altimetry data (six schemes) | ||||
| CU1 | CV1 | Y | Y | - |
| CU2 | CV2 | Y | - | Y |
| CU3 | CV3 | Y | Y | Y |
| Schemes | RMSE (m) | Schemes | RMSE (m) | ||
|---|---|---|---|---|---|
| Calibration | Validation | Calibration | Validation | ||
| AU1 | 0.105 | 0.204 | AV1 | 0.100 | 0.216 |
| BU1 | 0.179 | 0.146 | BV1 | 0.177 | 0.148 |
| BU2 | 0.154 | 0.313 | BV2 | 0.153 | 0.316 |
| BU3 | 0.172 | 0.227 | BV3 | 0.168 | 0.234 |
| CU1 | 0.108 | 0.202 | CV1 | 0.104 | 0.210 |
| CU2 | 0.106 | 0.206 | CV2 | 0.102 | 0.204 |
| CU3 | 0.109 | 0.205 | CV3 | 0.105 | 0.205 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shen, Y.; Liu, D.; Jiang, L.; Yin, J.; Nielsen, K.; Bauer-Gottwein, P.; Guo, S.; Wang, J. On the Contribution of Satellite Altimetry-Derived Water Surface Elevation to Hydrodynamic Model Calibration in the Han River. Remote Sens. 2020, 12, 4087. https://doi.org/10.3390/rs12244087
Shen Y, Liu D, Jiang L, Yin J, Nielsen K, Bauer-Gottwein P, Guo S, Wang J. On the Contribution of Satellite Altimetry-Derived Water Surface Elevation to Hydrodynamic Model Calibration in the Han River. Remote Sensing. 2020; 12(24):4087. https://doi.org/10.3390/rs12244087
Chicago/Turabian StyleShen, Youjiang, Dedi Liu, Liguang Jiang, Jiabo Yin, Karina Nielsen, Peter Bauer-Gottwein, Shenglian Guo, and Jun Wang. 2020. "On the Contribution of Satellite Altimetry-Derived Water Surface Elevation to Hydrodynamic Model Calibration in the Han River" Remote Sensing 12, no. 24: 4087. https://doi.org/10.3390/rs12244087