Abstract
The inland aquaculture environment is an artificial ecosystem, where the water quality is a key factor which is closely related to the economic benefits of inland aquaculture and the quality of aquatic products. Compared with marine aquaculture, inland aquaculture is normally smaller and susceptible to pollution, with poor self-purification capacity. Considering its low cost and large-scale monitoring ability, many researches have developed spectrum sensor on-board satellite platforms to allow remote monitoring of inland water surface. However, there remain many problems, such as low image resolution, poor flexible data acquisition, and anti-interference. Apart from that, the conventional forecasting model is of weak generalization ability and low accuracy. In our study, we combine unmanned aerial vehicles system (UAVs) with the wireless sensor network (WSN) to design a new ground water quality parameter and drone spectrum information acquisition approach, and to propose a novel dynamic network surgery-deep neural networks (DNS-DNNs) model based on multi-source feature fusion to forecast the distribution of dissolved oxygen (DO) and turbidity (TUB) in inland aquaculture areas. The result of using fused features, including characteristic spectrum, Gray-level co-occurrence matrix (GLCM) texture feature, and convolutional neural network (CNN) texture feature to build a model is that the characteristic spectrum+ CNN texture fusion features were the best input items for DNS-DNNs when forecasting DO, with the determination coefficient of the vertical set arriving at 0.8741, while the characteristic spectrum+ GLCM texture+ CNN texture fusion features were the best for TUB, with the reaching 0.8531. Compared with a variety of conventional models, our model had a better performance in the inversion of DO and TUB, and there was a strong correlation between predicted and real values: reached 0.8042 and 0.8346, whereas the root mean square error (RMSE) were only 0.1907 and 0.1794, separately. Our study provides a new insight about using remote sensing to rapidly monitor water quality in inland aquaculture regions.
1. Introduction
Inland aquaculture refers to the use of freshwater on the land surface to engage in freshwater fishery production activities such as fishing and breeding of aquatic products with economic value. It is one of the important components of the entire aquaculture industry [1]. The good development of aquatic products has strict requirements on the quality of water. In inland aquaculture, sustainable development of fish depends on their ability to reproduce and grow in the right environment. In recent years, however, with the rapid development of economy, the discharge of industrial wastewater and domestic sewage has increased greatly, which has caused environmental pollution and polluted the water quality of aquaculture. Therefore, it is necessary for the aquaculture industry to effectively monitor water quality by using monitoring technology [2]. As an important research content of intelligent agriculture and agricultural internet of things, how to quickly and accurately obtain water quality information has become a concern of scholars.
Common water quality monitoring approaches mainly depend on the manual operation of instruments and experience, which not only takes a lot of energy and time, but also has some shortcomings, such as long monitoring period, limited monitoring scope, etc. Based on data transmission and analysis technology, automatic water quality monitoring achieves intelligent acquisition and analysis of water quality index, which is characterized by high timeliness, labor saving, strong data credibility as well as high intelligence. Meanwhile, it is of great significance to realize real-time monitoring of water quality and efficient dynamic management of water body, so it is an important development trend of water quality monitoring. However, the realization of automatic water quality monitoring technology depends on the software technology which can quickly and accurately realize water quality testing and the instrument system which can carry out transmission and monitoring remotely. Due to its characteristics such as flexibility, self-organization and intelligence, wireless sensor network (WSN) plays an important role in the field of automatic water quality monitoring. WSN is characterized by wide monitoring scope, short monitoring period, high intelligence, high monitoring timeliness, so it can support the collection and communication of a variety of water quality sensors. Therefore, it can timely display the data, and the staff can find and solve the problems about water quality timely, so it is gradually paid much attention to in the field of aquaculture. YSI5200 aquaculture monitoring system launched by American USI Company can monitor six water quality parameters simultaneously, but the power consumption and cost are relatively high. Zhu et al. [3], coming from China Agricultural University, combined web-server embedded technology with mobile communication technology to develop a remote wireless system for online water quality monitoring in intensive breeding environment. Epinosa-Faller and Rendon-Rodriguez [4] developed ZigBee wireless sensor network to monitor an experimental aquaculture recycling system, in which the temperature, dissolved oxygen, water, and air pressure, and current sensors were installed. Then, a monitor program was developed using the C# programming language to run on Windows PC, so as to display and store sensor values and compare them with reference values. Huang Jianqing et al. [5] designed an aquaculture monitoring system based on wireless sensor network, which realized aquaculture environment monitoring. However, it is difficult to deploy in a water body and cannot visually present the distribution effect of water quality factors [6,7,8].
Water quality monitoring technology based on spectral remote sensing analysis is an important development direction of automatic monitoring of aquaculture water quality [9,10,11]. Spectral remote sensing technology, characterized by fastness, wide range, low cost, and periodicity, can effectively monitor the spatial and temporal changes of water quality parameters on the water body surface, making up for the shortcomings of conventional WSN monitoring. Gitelson et al. [12] found that monitoring an algal water body by means of remote sensing monitoring technology could overcome the shortcomings of conventional monitoring technology, with a relatively high monitoring practicability. Meanwhile, it used the motion law of reflection peak near 700 nm and the differential technology of spectral curve to model and estimate the concentration of Chl-a. Spectral remote sensing technology has wide parameters to water reaction and has a good feedback to the overall quality of the water body. Shi Rui et al. [13] used spectrum reconstruction method and wavelet denoising method to process remote sensing images, and adopted neural network method to fit the measured chlorophyll concentration. The study found that the concentration distribution of Ulansuhai Nur chlorophyll had indicative characters, and at the same time, the chlorophyll concentration had a certain regularity on space-time distribution. In the analysis of remote sensing water quality monitoring carried out by Ai Yeshuang et al. [14], an adaptive sampling consistency limit learning machine algorithm was applied to invert and analyze the concentration of suspended solids in a water body, and thereby stable effects were obtained. The researchers developed the remote sensing monitoring of water quality from simple qualitative analysis into quantitative inversion, from an empirical model with spatial and temporal limitations to a widely applicable biological optical model, which continuously broadened the application prospects of remote sensing water quality monitoring [15,16]. In addition, with the emergence of various remote sensing data sources, especially hyperspectral and multispectral remote sensing data, and the deep understanding of the spectra of various water quality parameters, the parameters of remote sensing water quality monitoring continue to increase, and the inversion accuracy also constantly improves [17,18,19]. However, the past remote sensing monitoring was mainly based on satellite remote sensing, and its data source only had a spatial resolution of 10–30 m and a spectral resolution of 10–20 nm, so it isn’t suitable for the mapping of inland small and medium inland water, especially the typical aquaculture area in Guangdong Province. In addition, it is necessary to eliminate the influence of atmospheric scattering, so it cannot be widely used in the monitoring of various water bodies. In fact, there hasn’t been a perfect satellite remote sensing data source for inland water bodies up to now [20].
In recent years, the application field of unmanned aerial vehicles system (UAVs) has been continuously expanded. It has become a new trend to observe water quality characteristics through ground experiments and spectral radiometers by using UAVs equipped with spectral cameras, which has been favored by researchers [21,22,23], as they are rapid, efficient, and flexible spectrum information acquisition systems. Peter et al. [24] used UAVs remote sensing to obtain data, analyzed the impact of land leveling in catchment areas on linear soil erosion in ditches, and carried out an effective assessment of water and soil loss in water areas. Su and Chou [25] used the multispectral sensors installed on UAVs to map the nutritional status of small reservoirs, and the designed remote sensing system had a relatively high spatial resolution (0.1 m). After the ground measurement, UAVs spectral imaging was implemented as soon as possible to effectively shorten the time interval between remote sensing imaging and ground measurement. Taking the east lake on the campus of Zhejiang A & F University as the research object, Liu et al. [26] obtained spectral reflectance data by means of multispectral sensor mounted on UAVs, constructed the inversion models of total phosphorus (TP), suspended substance concentration (SS) and turbidity (TUB), and studied the spatial distribution of their concentrations, which provided a new technical means for the monitoring of water quality parameters. Compared with common satellite remote sensing, UAV remote sensing can more clearly obtain the spectrum information of water quality, because its sensors are closer to the surface of water, it can minimize the impact of the atmosphere in the radiation transmission and has higher spatial resolution and spectral data accuracy, so it is more suitable for dynamically monitoring the water quality factors of factory intensive aquaculture in inland water environment. However, UAVs spectral remote sensing combined with ground WSN monitoring data and the inversion water quality distribution approaches have rarely been reported.
Water quality remote sensing inversion algorithm can be roughly divided into empirical algorithm and model-based algorithm. The empirical algorithm mostly adopts a ratio method, such as hyperbolic exponential algorithm [27], binary quadratic polynomial algorithm [28], SeaWiFS algorithm [29] as well as the semi-empirical Carder model [30]. However, with the development of the bio-optical model, the quantitative inversion algorithm based on model has become the mainstream of retrieving the correlation between the water body components and the spectral radiation characteristics of water body. Quantitative inversion mostly adopts linear regression model. For example, Olmanson et al. [31] used unitary linear equations to invert the water quality evaluation index of the Mississippi River. However, it isn’t enough for the linear model to describe the complex relationship between remote sensing observation indexes and water quality parameters, which may easily lead to information loss and distortion, and its practicability is limited. Therefore, nonlinear models such as artificial neural network (ANN), extreme learning machine (ELM) and so on are gradually adopted. Zhu Yunfang et al. [32] established the ANN model by using GF-1 WFV4 image and real-time ground sampling data, which indicated that the accuracy of establishing inversion model by the ANN was usually higher than that of the previous ratio method. Sun Deyong et al. [33] made an attempt on remote sensing inversion of the concentration of suspended substances in Taihu Lake by using ANN. Although ANN can approach arbitrarily complex nonlinear relations, there are still some problems, such as slow learning convergence speed, easiness to fall into local extremum, and difficulty to determine the network structure. As a new single-hidden layer forward neural network, ELM has the advantages that ANN describes nonlinear relations and its own network structure is easy to determine, and at the same time, it has fast learning speed, strong generalization ability [34]. However, due to numerous and complex uncertain factors in the ground synchronous measurement of water quality elements (such as measurement methods, weather conditions, and the laboratory technicians’ proficiency in work standards), large data size, much noise, as well as complex relationship between mixed pixels, so that the conventional linear regression, ANN and ELM algorithm cannot adapt to these features, resulting in a low inversion precision. Therefore, a new information extraction method and inversion model are needed.
In this paper, combining with the ground WSN and UAVs spectral remote sensing technology, an acquisition scheme of water quality spectral elements suitable for the complex water bodies of aquaculture was designed. Based on the general packet radio service (GPRS) protocol, the ground WSN network built a real water quality parameter acquisition system on the ground, and the parameters include dissolved oxygen (DO) and turbidity (TUB) values, which are sensitive to aquaculture organisms, large changes in them may directly lead to the death of aquaculture organisms. The UAVs is equipped with a spectral imager to obtain the spectral data of water quality elements. Based on the measured data of UAVs spectral data and ground sensor monitoring, a dynamic network surgery-deep neural networks (DNS-DNNs) water quality spectral inversion model based on multi-source feature fusion was proposed to predict the distribution of dissolved oxygen and turbidity in aquaculture area.
The main innovations and contributions of our research work are as follows:
- (1)
- The UAV was used as the remote sensing platform to make the data acquired by multispectral sensor easier to process, which could avoid the difficult atmospheric correction process due to low reflectance response. UAVs and ground WSN were combined into a complete acquisition system, to realize automatic data acquisition and improve acquisition efficiency.
- (2)
- The texture features of characteristic spectrum images were extracted by GLCM and CNN methods, respectively, and different fusion features were formed by combining with the characteristic spectrum to explore the optimal fusion features suitable for different water quality parameters.
- (3)
- A DNS-DNNs water quality spectrum inversion model was proposed. Due to the high computational complexity of the DNNs model, the dynamic network surgery method was adopted to induce the regular term by updating the weight matrix, so as to make it more sparse, thus effectively compressing the network and reducing the complexity.
- (4)
- In order to visually display the spatial variation law of water quality parameters, the DNS-DNNs optimal estimation model based on multi-source feature fusion was used to calculate and generate the prediction distribution diagram of DO and TUB, and the three-dimensional visualization of water quality parameters was realized.
2. Materials and Methods
The method that we are proposing can be structured according to the following steps: UAVs overflight with multispectral cameral and processing of spectral data; Ground WSN water quality data collection and processing; Characteristic spectrum acquisition based on correlation analysis; training and vertification of the DNS_DNNs; and inversion of DO and TUB. The flowchart of the proposed method is depicted in Figure 1 and detailed in the following items.
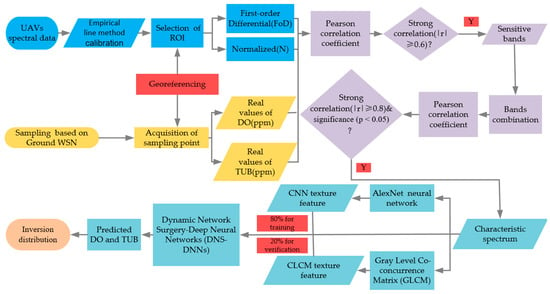
Figure 1.
Flowchart of the proposed method.
2.1. Study Area
The experimental area is an aquaculture area that is located in Zengcheng Teaching and Research Base of South China Agricultural University, Guangzhou, China (113°38′14.5″ E, 23°14′36.3″ N), as shown in the red area in Figure 2c. According to actual surveys, the area of aquaculture is 10,000 m2 and the average depth between 2 and 2.5 m. About 6000 Mandarin fish are cultured in this area. Mandarin fish are sensitive to DO and TUB of water, The DO concentration value should be greater than 3.0 ppm (1 ppm = 1mg / L) and the TUB concentration value should be lower than 25.0 ppm in water [35]. This area meets the composition criteria for a small inland aquaculture area.
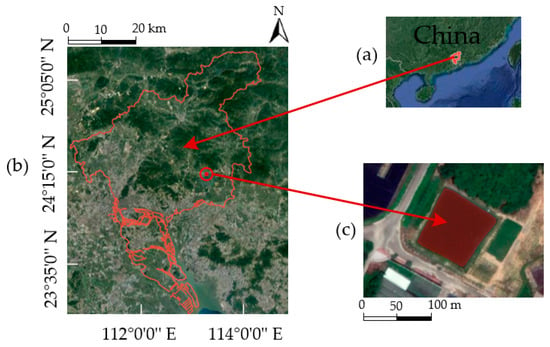
Figure 2.
Study area; (a) Geographic location of Guangzhou within China; (b) location of Inland aquaculture area in Guangzhou; (c) Top view of 300 m above the study area taken by 14.4MP RGB Sensors.
2.2. Wireless Sensor Network
The ground WSN acquisition node (AN) consists of DO sensor, TUB sensor, solar panel and system control box internally equipped with GPRS communication module, as shown in Figure 3, and it can monitor the water quality of aquafarm in real time. The system control box has a built-in STM32F407 controller, GPRS communication module and RS485 interface accessories, which were burnt with the sensor driver and communication algorithm program. In order to continue field operation, the acquisition controller used solar panels made of monocrystalline silicon as the power supply. The acquisition interval is 3 min/time. If the battery is fully charged, its time of endurance is more than two days. The collected data are uploaded to the cloud for analysis and processing, and sent to the mobile terminal software for display. The measured value of water quality monitoring can be exported from the mobile terminal.

Figure 3.
Ground wireless sensor network structure.
2.3. Unmanned Aerial Remote Sensing System
The spectral reflectance data were obtained by means of the multispectral sensor mounted on the UAVs, and the inversion models of DO and TUB were constructed to study the spatial distribution of their concentrations. The UAVs spectrum platform adopted is composed of DJI M600 pro UAVs, manufactured by DJI Innovations, K4 multi-spectrometer and ground control station, as shown in Figure 4. The wavelength range of K4 is 395~1000 nm, including 21 filters, and the spatial resolution is 0.155 m.
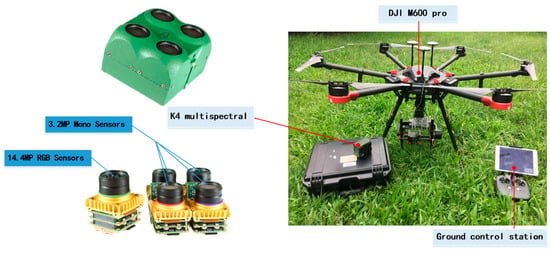
Figure 4.
Multi-spectrometer (K4) and unmanned aerial vehicles system (UAVs).
2.4. Data Acquisition and Processing
Under the condition of clear sky, the calm water surface is captured by the spectral sensor due to the flare generated by clouds and solar scintillation, which results in the changes in the spectral information of water quality and seriously affects the modeling accuracy [36]. The flare intensity decreases with the increase of the azimuth difference between the sun and the sensor, and rapidly decreases with the increase of the solar altitude. After surveying for many times, when the sun’s altitude angle increases to 30° and the azimuth angle increases to 70°, the solar flare almost disappears. Therefore, in order to eliminate the influence of solar flares on the extraction of water quality information, we selected four time points (09:30 on 3 May 2019, 15:30 on 3 May 2015, 09:30 on 5 June 2019, and 15:30 on 5 June 2019) for sample measurement. To reduce the accumulated error, the calibrated reference was measured prior to each sample measurement. We acquired 20 spectral images with each filters, respectively, and used the empirical line method (ELM) [37,38] to calibrate them to surface reflectance. As a result, there are a total of 420 spectral images after radiometric calibration.
There were an aeration zone and a feeding zone in the study area. In order to reflect the diversity and representativeness of the sampling points, a total of 11 sampling points were set, including 3 offshore sampling points (SP9–SP11) and eight shore side sampling points (SP1–SP8). Combining with the ground measured data obtained by the developed ground WSN equipment, the test site and ground data sampling points are shown in Figure 5. The statistical distribution of the real values of DO and TUB during the four sampling times were shown in Figure 6, where .
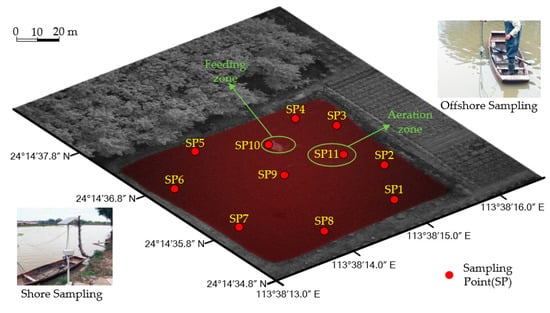
Figure 5.
Test area and sampling point distribution.
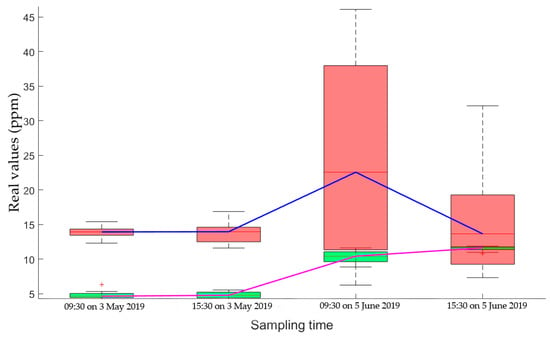
Figure 6.
Boxplots of real values of dissolved oxygen (DO) and turbidity (TUB), respectively.
In the same four time periods, a UAVs with multi-spectrometers was used to obtain multispectral images 200 m above the study area. The UAVs was controlled to be in a hovering state, and the shooting angle of the spectrometer was vertically downward.
In order to obtain sensitive bands, 420 spectral images were selected visually. We totally selected one spectral image in each of the four time periods for every band, so there are 84 spectral images, and that cover all sampling point. A large amount of data taken was selected visually. The image directly above the sampling point was selected and imported into ENVI5.3 software. Then, 11 water surface sampling points were found according to according to the latitude and longitude coordinates, and a 16 × 16 (ppi) matrix centering on the sampling point was constructed as the region of interest (ROI). Later, taking the average spectral reflectance of all points in the region as the spectral reflectance data of this point, a total of 924 sets of spectral reflectance data of water quality corresponding to ground WSN monitoring data were obtained.
2.5. Image Denoise and Feature Spectrum Acquisition
The spectral data acquisition process is often influenced by instrument noise and other factors, and there are nonlinear absorbance, baseline variation and additional scattering variation [39], which inevitably produces errors. Therefore, in order to reduce the interference of noise with the model, Savitzky-Golay filtering method based on time-domain local polynomial least square fitting was adopted for preprocessing [40].
To establish an inversion model with high accuracy, the Pearson correlation coefficient was carried out to the measured DO and TUB and the normalized (N) and first-order differential (FoD) water spectral reflectance to obtain the sensitive bands of DO and TUB. The correlation coefficient is shown in Figure 7.
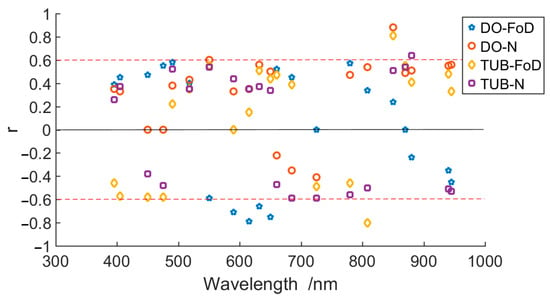
Figure 7.
The reflectivity of dissolved oxygen (DO) and turbidity (TUB) respectively.
By comparison, it was found that there was a strong correlation() between DO and the first-order differential water spectral reflectance near the wave band of 550 nm, 590 nm, 615 nm and 632 nm, and there was a significant correlation between DO and the normalized spectral reflectance at 550 nm () and 850 nm (), indicating that the variation of DO had a significant impact on the spectral reflectance of water body at 550 nm, 590 nm, 615 nm, 632 nm, and 850 nm. Meanwhile, there was a strong correlation between TUB and the first-order differential water spectral reflectance at 808 nm () and 850 nm (), and there was a significant correlation between TUB and normalized spectral reflectance at 880 nm (). Therefore, in this paper, the sensitive bands of DO were selected as 550 nm, 590 nm, 615 nm, 632 nm, 850 nm, and the sensitive bands of TUB were selected as 808 nm, 850 nm, and 880 nm.
In order to reduce the interference of background information and extract more effective spectral information, several popular band combination empirical indices, including average red green (ARG), red green ratio (RGR), near-infrared red ratio (NRR), red green(RG), sum red green (SRG), senescence reflectance (SR), anthocyanin reflectance (AR), vogelmann (VOG) and average near-infrared (ANIR), were extracted as presented in Table 1. Those combination formulae were applied to the sensitive bands to obtain the characteristic spectral information.

Table 1.
Spectral parameters and band combination formula.
2.6. Image Texture Information Extraction
The decomposition of suspended organic matters containing chlorophyll a (Chl.a) in freshwater aquaculture water leads to a huge consumption of oxygen and produces a large amount of carbon dioxide, which eliminates the effect of photosynthesis of algae on DO, thus resulting in a negative correlation between the change of chlorophyll a and DO. However, the change of chlorophyll a content is reflected in the change of water texture characteristics, so the DO value change can be represented by the texture characteristics of chlorophyll a in water body [48]. Turbidity refers to the darkening of the light beam passing through the suspended substances in water, and there is a positive correlation with suspended substances, so the change of turbidity value can also be represented by the texture characteristics of suspended substances in water [49].
In this paper, the Gray level co-concurrence matrix (GLCM) [50] was used to extract the texture features of characteristic spectrum, and the convolutional neural network was applied to extract the CNN texture. Based on the GLCM texture feature, the extraction distance parameter was set as 1 pixel, and the direction was 0°, 45°, 90°, and 135°, respectively. 4 texture features, including energy, contrast, correlation and homogeneity, were extracted in the ROI (). Based on the pre-trained AlexNet [51] neural network, the texture features of spectral images under sensitive bands and band combinations were extracted.
2.7. DNS-DNNs Algorithm
DNNs is a deep learning model, which is one of the most popular research directions in the field of artificial intelligence in recent years. Its main principle is to automatically extract features in data, layer by layer, through deep neural network and feedback propagation. Set the network weight matrix as V, the bias vector as b, the total number of samples as m, the total number of network layers as . Assuming the function is h, the network layer number is ( = 1,2,…,), the total number of neurons in the lth layer is , the weighted attenuation factor is , and the minimum loss function J is
where is the weight matrix between the jth neuron in the layer l + 1 network and the ith neuron in the layer 1 network; is the ith input sample vector; is the ith output vector; is a hypothesis function with parameters V and b.
Due to the complex structure and large calculated amount of DNNs, the model’s power consumption is high and regression speed is slow. In order to compress the network, dynamic network surgery [52] was used in the training process to carry out the induction of regular items for the updating of the weight matrix to make it more sparse, so that most of the weights were 0. Dynamic network surgery includes two processes: pruning and splicing, in which pruning cuts the weights which are considered to be unimportant, while splicing verifies the importance of weights and recovers the important weights that have been cut. Updating as the following scheme. That is,
in which indicates a positive learning rate. We update not only the important parameters, but also the ones corresponding to zero entries of b, which are considered unimportant and ineffective to decrease the network loss. The DNS-DNNs algorithm in this paper as Table 2.
Table 2.
Dynamic network surgery for solving optimization problem of DNNs.
Two indexes, and RMSE, were used in the modeling evaluation. The mean value of the performance indexes was taken as the experimental result after running for 20 times.
3. Results
3.1. Spectral Data Correlation Analysis and Texture Feature Extraction
Pearson correlation coefficient was carried out to each calculation formula and the DO content and TUB values actually measured at 11 sampling points, as shown in Table 3. Bands and band combination parameters with a strong correlation () and significance level p < 0.05 were selected as the characteristic spectra for modeling analysis.
Table 3.
Correlation between spectral parameters and water quality elements.
As shown in Table 3, the characteristic spectra conforming to the requirements of DO are S1, S3, S7, S10, S12 and S14, respectively, with 264 sets of data. The characteristic spectra conforming to the requirement of TUB are S1, S2, S3 and S5, respectively, with 174 sets of data.
Characteristic spectral images were extracted from the DO and TUB data samples conforming to the requirements, and 264 DO characteristic spectral images and 174 TUB characteristic spectral images were obtained. Four kinds of texture features were adopted for each image, and the collection directions of each feature were 0°, 45°, 90°, and 135°, respectively, and 16-dimensional GLCM texture was obtained. Therefore, the data volumes of GLCM texture features of DO and TUB are 4224 and 2784, respectively. AlexNet extracted 160-dimensional CNN texture, and there were a total of 176-dimensional texture features. Therefore, the data volumes of CNN texture features of DO and TUB are 42,240 and 27,840 respectively. Further, 80% of characteristic parameters, including characteristic spectral, GLCM texture features, and CNN texture features, were randomly selected as the correction set for modeling, and the remaining 20% was used as the verification set for evaluating the model’s performance.
3.2. Comparative Analysis of DNS-DNNs Modeling Results Based on Multi-Source Feature Fusion
The DNS-DNNs model was established for the two water quality parameters. After experiments, when the weight attenuation factor was adjusted to 0.9, the number of DNNs layers was set as 6, the number of hidden neurons was 20–10–10–20, the learning rate was , and the dropout intensity of the optimization objective function was set as 0.1, the best parameter performance was obtained. In the training process, the best iteration times were selected by using the early stop method, as shown in Figure 8.
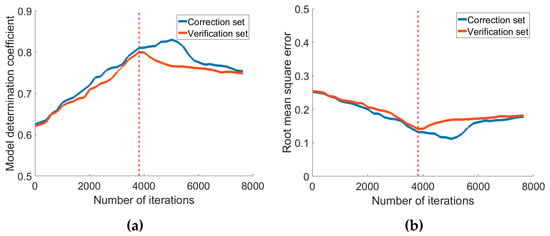
Figure 8.
Model evaluation with number of epochs based on early stopping method. (a) The trend of determination coefficient as the number of iterations increases; (b) The trend of Root mean square error as the number of iterations increases.
The characteristic spectrum was optimized by fusing with GLCM texture feature and CNN texture feature, the DNS-DNNs model based on characteristic spectrum +GLCM texture feature fusion, characteristic spectrum +CNN texture feature fusion, characteristic spectrum +GLCM texture feature +CNN texture feature fusion, and single characteristic spectrum was established, respectively, as shown in Table 4.
Table 4.
Prediction performance of DO and TUB for DNS-DNNs model based on feature fusion.
3.3. Comparative Analysis of Water Quality Inversion Model Based on Feature Fusion
In order to compare with conventional inversion model performance, multivariable linear regression model (MLRM), ANN and ELM inversion models were established, and then the calibration set of the characteristic spectrum of DO + CNN texture feature, and the calibration set of the characteristic spectrum of TUB + GLCM texture + CNN texture fusion feature was imported into the above model, respectively. The determination coefficient and root mean square error (RMSE) of the inversion model corresponding to each parameter are shown in Table 5.
Table 5.
Model performance analysis in different modeling methods.
The data of verification set was imported into each conventional model and DNS-DNNs model to predict the concentration values of DO and TUB, which were linearly fitted with the measured values. The test results are shown in Figure 9.
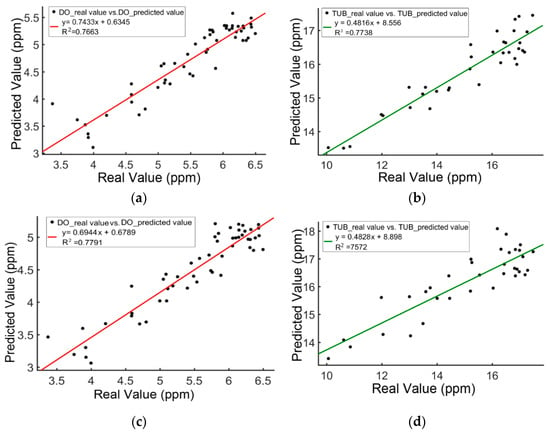
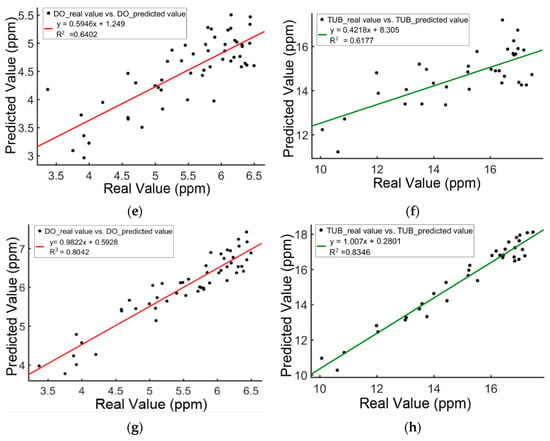
Figure 9.
Comparison of real and predicted DO and TUB by different modeling methods. (a) DO_ MLRM; (b) TUB_ MLRM; (c) DO_ANN; (d) TUB_ ANN; (e) DO_ELM; (f) TUB_ELM; (g) DO_DNS_DNNs; (h) TUB_DNS_DNNs.
3.4. DO and TUB Content Verification and Distribution Dynamic Inversion
Based on the characteristic spectrum image, obtained in Section 3.1, the background and shadows are removed by automatic binarization, and the entire water area is extracted as a new ROI. At this time, the size of the characteristic spectrum image is uniformly . Based on the above conclusions, the DNS-DNNs model based on multi-source feature fusion was established to predict the distribution of DO and TUB in water body. The spectral curve corresponding to each pixel was all imported into the DNS-DNNs model, and the spectral information of each pixel and its related points could predict the concentration values of DO and TUB at that point, so as to further obtain the distribution of DO and TUB in the whole region.
We select 4 ROI which are from characteristic spectrum images at 09:30 and 15:30 on May 3, and use the trained DNS-DNNs model to forecast the DO and TUB concentration distributions in ROI, and present them in a three-dimensional space. The distribution results are shown in Figure 10.
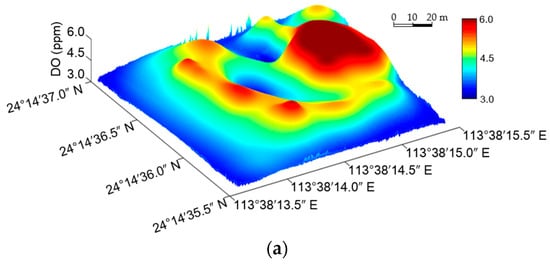
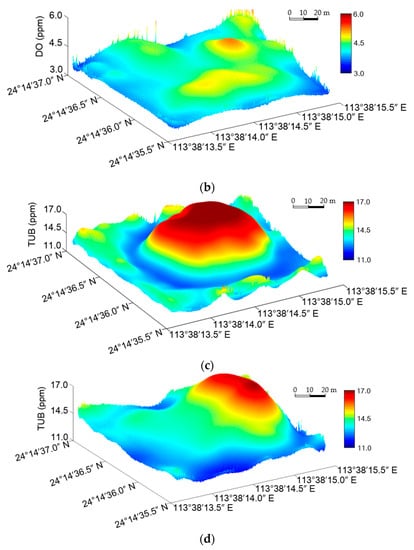
Figure 10.
3D Map of DO and TUB concentration distribution for the area based on ICA-DNNs with optimum parameters respectively. (a) DO concentration distribution at 09:30 on 3 May 2019; (b) DO concentration distribution at 15:30 on 3 May 2019; (c) TUB concentration distribution at 09:30 on 3 May 2019; (d) TUB concentration distribution at 15:30 on 3 May 2019.
4. Discussion
4.1. DNS-DNNs Performance Analysis Based on Different Multi-Source Feature Fusion
As provided in Figure 8, when the number of iterations was selected as 3819 by using the early stop method, the model determination coefficient of the verification set reached the maximum, the root-mean-square error reached the minimum, and the model’s comprehensive performance was the best.
The correction set and verification set of DNS-DNNs model based on characteristic spectrum for the two water quality parameters was less than 0.8 in Table 4. The model’s performance didn’t reach the ideal state, and the generalization ability was weak. The characteristic spectrum + CNN texture fusion feature had the best effect in the prediction of DO, and at this time, the correction set and verification set was 0.8741 and 0.8042, respectively, and RMSE was 0.1938 and 0.1907, respectively. In the prediction of TUB, the effect of the characteristic spectrum + GLCM texture feature + CNN texture feature was the best. Compared with the modeling using characteristic spectrum alone, the stability of the model was improved and the generalization ability was enhanced to a certain extent under the fusion of various data including characteristic spectrum and image texture features.
4.2. Different Inversion Model Performance Analysis
After comparing Table 4 with Table 5, it could be seen that, among the training results of DO fusion features, ELM model had the worst performance, and its was only 0.6493, and the ANN model had the best performance, and its was only 0.7853, which was lower than that of DNS-DNNs (0.8741). In the comparative analysis on the training results of Do fusion features, it was found that, among the two water quality parameters: DO and TUB, for the MLRM model with the best performance, was 0.7727, which was also lower than that of DNS-DNNs model (0.8531).
It could be known that the conventional models all had different degrees of predicted deviation data points in Figure 9, mainly because the modeling involved in the model’s bias-variance contradiction, the model’s complexity wasn’t enough, and the extracted effective features were not sufficient or they were not completely related to the original data, thus affecting the model’s robustness and generalization ability. The predicted values of the two water quality parameters by the DNS-DNNs model were close to the trend line of the measured values, and was 0.8042 and 0.8346, respectively, and there were bias data points. Basically, it could be seen that the estimation level of the model was stable and close to the real value.
4.3. Effects of Dynamic Inversion Distribution
As shown in Figure 10a, at 09:00, the concentration of DO in the oxygenated zone was significantly higher than that in other regions, and gradually diffused to the surrounding area and decreased. In the feeding area, the average DO concentration was the lowest because there were more fish and oxygen consumption was fast. In Figure 10b, compared with the distribution of DO concentration at 09:00, the distribution at 15:00 was more uniform in the entire aquaculture area, while the overall average concentration was slightly lower than the former. The reason is that although the enhanced photosynthesis of the plants increased the natural DO on the water surface, the farmer reduced the power of the aerator which resulted into dramatic reduction in artificial DO. According to Figure 10c, the high turbidity value in this area was caused by the frequent fish movement and fast metabolism in the feeding area and oxygenated area, and the agitated water body drove the floating of impurities in water bottom. As the surrounding area of the study area was the shallow water area, and the spectral reflectance of bottom impurities was high, there was a higher average turbidity value. Compared with the TUB distribution in Figure 10c, that in Figure 10d does not change much, and the high TUB values are mainly concentrated in the aeration and feeding zones.
5. Conclusions
In the research, in view of the deficiencies existing in conventional water quality testing methods and water quality inversion models, and combined with internet of things and UAVs technology, a water quality parameter acquisition approach which is suitable for fresh water aquaculture was designed, and a prediction model of water quality parameter content distribution of deep learning based on multi-source feature fusion of spectral image and convolutional neural network was proposed. Both theoretical research and experimental verification proved that the application of UAVs remote sensing technology combined with ground WSN automatic monitoring technology was feasible in water quality factor inversion. UAVs remote sensing is a research carried out under the guidance of the inversion idea of water quality factors of satellite remote sensing, and it is proved that the data fusion conducted by the data extracted from multispectral sensors with different features can meet the inversion requirements of some water quality factors. The DNS-DNNs model constructed on the basis of deep learning has a better adaptability to multi-source feature fusion spectral information. Compared with the conventional inversion algorithm, the model’s stability was improved, and its generalization ability was also enhanced, so it can successfully predict the distribution of DO and TUB in inland aquaculture area.
At present, there are few applications in the field of inland aquaculture water monitoring using UAVs hyperspectral data. It is also important to choose the right algorithm for inland aquaculture water quality monitoring research. We hope that our research can provide technical support for the monitoring of water quality in inland water, especially in inland aquaculture. However, there is still some room for improvement. For example, on the one hand, we will explore new wireless transmission mode to transmit spectral data and real values of ground WSN to the server directly, and process water quality parameters in real time by combining with edge calculation. On the other hand, we will increase the number of spectral bands, and expand the amount of sensitive feature data for inversion accuracy improvement. Additionally, we also believe that extending our study to incorporate multi-UAVs collaborative operation to realize large-scale inversion of large areas of water, which will be interesting.
Author Contributions
conceptualization, L.W., X.Y. and H.W.; methodology, L.W., and K.L.; software, L.W., Y.L. and K.L.; funding acquisition, X.Y.; formal analysis, L.W.; investigation, L.W., J.H. and W.P.; data curation, L.W., Y.L. and J.W.; writing—original draft preparation, L.W.; writing—review and editing, L.W., X.Y., H.S., H.W., Y.L. and J.W.; visualization, L.W.; supervision, X.Y. All authors have read and agreed to the published version of the manuscript.
Funding
This research was funded by the SCIENCE AND TECHNOLOGY PLANNING PROJECT OF GUANGDONG, grant number 201803020022. This research was also partly supported by the WATER CONSERVANCY SCIENCE AND TECHNOLOGY INNOVATION PEOJECT OF GUANGDONG, grant number 2016-18.
Acknowledgments
The authors would like to thank all authors for opening source codes used in the experimental comparison in this work. We are thankful to the anonymous reviewers for their valuable comments that greatly helped to improve this paper.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Lynch, A.J.; Cooke, S.J.; Deines, A.M.; Bower, S.D.; Bunnell, D.B.; Cowx, I.G.; Nguyen, V.M.; Nohner, J.; Phouthavong, K.; Riley, B.; et al. The social, economic, and environmental importance of inland fish and fisheries. Environ. Rev. 2016, 24, 115–121. [Google Scholar] [CrossRef]
- Ma, Y.; Sun, L.; Liu, C.; Yang, X.; Zhou, W.; Yang, B.; Schwenke, G.; Liu, D. A comparison of methane and nitrous oxide emissions from inland mixed-fish and crab aquaculture ponds. Sci. Total. Environ. 2018, 637, 517–523. [Google Scholar] [CrossRef] [PubMed]
- Zhu, X.; Li, D.; He, D.; Wang, J.; Ma, D.; Li, F. A remote wireless system for water quality online monitoring in intensive fish culture Compute. Electron. Agric. 2010, 715, 53–59. [Google Scholar]
- Francisco, J.; Epinosa, F.; Guillermo, E.; Rendon, R. A ZigBee wireless sensor network for monitoring an aquaculture recirculating system. Appl. Res. Technol. 2012, 10, 380–387. [Google Scholar]
- Huang, J.; Wang, W.; Jiang, S.; Sun, D.; Ou, G.; Lu, K. Development and test of aquacultural water quality monitoring system based on wireless sensor network. Trans. Chin. Soc. Agric. Eng. (Trans. CSAE) 2013, 29, 183–190. [Google Scholar]
- Shi, B.; Zhao, D.; Liu, X.; Jiang, J.; Sun, Y. Design of intelligent monitoring system for aquaculture. Trans. Chin. Soc. Agric. Mach. 2011, 42, 191–196. [Google Scholar]
- Qi, L.; Zhang, J.; Xu, M.; Fu, Z.; Chen, W.; Zhang, X. Developing WSN-based traceability system for recirculation aquaculture. Math. Comput. Modeling 2011, 53, 2162–2172. [Google Scholar] [CrossRef]
- Yan, B.; Shi, P. Intelligent monitoring system for aquiculture based on Internet of things. Trans. Chin. Soc. Agric. Mach. 2014, 45, 259–265. [Google Scholar]
- Bean, T.P.; Greenwood, N.; Beckett, R.; Biermann, L.; Bignel, J.P.; Brant, J.L.; Copp, G.H.; Devlin, M.J.; Dye, S.; Feist, S.W.; et al. A review of the tools used for marine monitoring in the UK: Combining historic and contemporary methods with modeling and socioeconomics to fulfill legislative needs and scientific ambitions. Front. Mar. Sci. 2017, 4, 263. Available online: https://doi.org/10.3389/fmars.2017.00263 (accessed on 15 August 2017). [CrossRef]
- Li, X.; Sun, W.; Li, L. Study on the Recognition of Spirulina Based on Visible Light Remote Sensing of the Small UAV. Geomat. Spat. Inf. Technol. 2017, 40, 153–156. [Google Scholar]
- Fabio, G.N.; Niculescu, S.; Gohin, F. Turbidity retrieval and monitoring of Danube Delta waters using multi-sensor optical remote sensing data: An integrated view from the delta plain lakes to the western-northwestern Black Sea coastal zone. Remote Sens. Environ. 2013, 132, 86–101. [Google Scholar]
- Gitelson, A.A.; Schalles, J.F.; Hladik, C.M. Remote chlorophyll-a retrieval in turbid, productive estuaries: Chesapeake Bay case study. Remote Sens. Environ. 2007, 109, 464–472. [Google Scholar] [CrossRef]
- Shi, R.; Zhang, H.; Yue, R.; Zhang, X.; Wang, M.; Shi, W. A wavelet theory based remote sensing inversion of chlorophyll a concentrations for inland lakes in arid areas using TM image data. Acta Ecologica Sinica 2017, 37, 1043–1053. [Google Scholar]
- Ai, Y.; Shen, Y. Measurement Uncertainty-Aware Quantitative Remote Sensing Inversion to Retrieve Suspended Matter Concentration in Inland Water. Acta Optica Sinica 2016, 36, 10–20. [Google Scholar]
- Olmanson, L.G.; Bauer, M.E.; Brezonik, P.L. A 20-year Landsat water clarity census of Minnesota’s 10,000 lakes. Remote Sens. Environ. 2008, 112, 4068–4097. [Google Scholar] [CrossRef]
- Tebbs, E.J.; Remedios, J.J.; Harper, D.M. Remote sensing of chlorophyll-a as a measure of cyanobacterial biomass in Lake Bogoria, a hypertrophic, saline-alkaline, flamingo lake, using Landsat ETM+. Remote Sens. Environ. 2013, 135, 92–106. [Google Scholar] [CrossRef]
- Khattab, M.F.; Merkel, B.J. Application of Landsat 5 and Landsat 7 images data for water quality mapping in Mosul Dam Lake, Northern Iraq. Arab. J. Geosci. 2014, 7, 3557–3573. [Google Scholar] [CrossRef]
- Bachiller-Jareno, N.; Hutchins, M.G.; Bowes, M.J.; Charlton, M.B.; Orr, H.G. A novel application of remote sensing for modelling impacts of tree shading on water quality. J. Environ. Manag. 2019, 230, 33–42. [Google Scholar] [CrossRef]
- Wang, G.; Li, J.; Sun, W.; Xue, B.; Aa, Y.; Liu, T. Non-point source pollution risks in a drinking water protection zone based on remote sensing data embedded within a nutrient budget model. Water Res. 2019, 157, 238–246. [Google Scholar] [CrossRef]
- Su, T.C. A study of a matching pixel by pixel (MPP) algorithm to establish an empirical model of water quality mapping, as based on unmanned aerial vehicle (UAV) images. Int. J. Appl. Earth Obs. Geo Inf. 2017, 58, 213–224. [Google Scholar] [CrossRef]
- Wei, L.; Huang, C.; Zhong, Y.; Wang, Z.; Hu, X.; Lin, L. Inland Waters Suspended Solids Concentration Retrieval Based on PSO-LSSVM for UAV-Borne Hyperspectral Remote Sensing Imagery. Remote Sens. 2019, 11, 1455. [Google Scholar] [CrossRef]
- Senthilnath, J.; Kandukuri, M.; Dokaniac, A.; Ramesh, K.N. Application of UAV imaging platform for vegetation analysis based on spectral-spatial methods. Comput. Electron. Agric. 2017, 140, 8–24. [Google Scholar] [CrossRef]
- R Veronez, M.; Kupssinskü, L.S.; TGuimarães, T.; Koste, E.C.; Da Silva, J.M.; De Souza, L.V.; Oliverio, W.F.; Jardim, R.S.; Koch, I.É.; De Souza, J.G.; et al. Proposal of a Method to Determine the Correlation between Total Suspended Solids and Dissolved Organic Matter in Water Bodies from Spectral Imaging and Artificial Neural Networks. Sensors 2018, 18, 159. [Google Scholar] [CrossRef] [PubMed]
- Peter, K.D.; d’Oleire-Oltmanns, S.; Ries, J.B.; Marzolff, I.; Hssaine, A.A. Soil erosion in gully catchments affected by land-levelling measures in the Souss Basin, Morocco, analyzed by rainfall simulation and UAV remote sensing data. Catena 2014, 113, 24–40. [Google Scholar] [CrossRef]
- Su, T.C.; Chou, H.T. Application of multispectral sensors carried on unmanned aerial vehicle (UAV) to trophic state mapping of small reservoirs: A case study of Tain-Pu reservoir in Kinmen, Taiwan. Remote Sens. 2015, 7, 10078–10097. [Google Scholar] [CrossRef]
- Liu, Y.J.; Xia, K.; Feng, H.L.; Fang, Y.M. Inversion of water quality elements in small and micro-size water region using multispectral image by UAV. Acta Sci. Circumstantiae 2019, 39, 1241–1249. [Google Scholar]
- Mishra, S.; Mishra, D.R.; Lee, Z. Bio-Optical Inversion in Highly Turbid and Cyanobacteria-Dominated Waters. IEEE Trans. Geosci. Remote Sens. 2013, 52, 375–388. [Google Scholar] [CrossRef]
- He, T.D.; Li, J.W. A Method for Water Quality Remote Retrieva Based on Support Vector Regression with Parameters Optimized by Genetic Algorithm. Adv. Mater. Res. 2011, 383, 3593–3597. [Google Scholar] [CrossRef]
- Tang, J.; Wang, X.; Song, Q.; Li, T.; Chen, J.; Huang, H.; Ren, J. The statistic inversion algorithms of water constituents for the Huanghai Sea and the East China Sea. Acta Oceanol. Sin. 2004, 4, 617–626. [Google Scholar]
- Cannizzaro, J.P.; Carder, K.L. Estimating chlorophyll a concentrations from remote-sensing reflectance in optically shallow waters. Remote Sens. Environ. 2006, 101, 13–24. [Google Scholar] [CrossRef]
- Olmanson, L.G.; Brezonik, P.L.; Bauer, M.E. Airborne hyspectral remote sensing to assess spatial distribution of water Quality characteristics in large rivers: The Mississippi River and its tributaries in Minnesota. Remote Sens. Environ. 2012, 130, 254–265. [Google Scholar] [CrossRef]
- Zhu, Y.; Zhu, L.; Li, J.; Chen, Y.; Zhang, Y.; Hou, H.; Ju, X.; Zhang, Y. The study of inversion of chlorophyll a in Taihu based on GF-1 WFV image and BP neural network. Acta Sci. Circumst. 2017, 1, 130–137. [Google Scholar]
- Sun, D.; Li, Y.; Wang, Q.; Le, C.; Huang, C.; Shi, K.; Wang, L. Study on remote sensing estimation of suspended matter concentration based on in situ hyperspectral data in Lake Tai waters. J. Infrared Millim. Wave 2009, 28, 124–128. [Google Scholar] [CrossRef]
- Cui, D. Application of extreme learning machine to total phosphorus and total nitrogen forecast in lakes and Reservoirs. Water Resour. Prot. 2013, 29, 61–66. [Google Scholar]
- Li, W.; Hicks, B.J.; Lin, M.; Guo, C.; Zhang, T.; Liu, J.; Li, Z.; Beauchamp, D.A. Impacts of hatchery-reared mandarin fish Siniperca chuatsi stocking on wild fish community and water quality in a shallow Yangtze lake. Sci. Rep. 2018, 8, 11481. [Google Scholar] [CrossRef] [PubMed]
- Zeng, C.; Richardson, M.; King, D.J. The impacts of environmental variables on water reflectance measured using a lightweight unmanned aerial vehicle (UAV)-based spectrometer system. ISPRS J. Photogramm. Remote Sens. 2017, 130, 217–230. [Google Scholar] [CrossRef]
- Moran, M.S.; Bryant, R.; Thome, K.; Ni, W.; Nouvellon, Y.; Gonzalez-Dugo, M.P.; Qi, J.; Clarke, T.R. A refined empirical line approach for reflectance factor retrieval from Landsat-5 TM and Landsat-7 ETM+. Remote Sens. Environ. 2001, 78, 71–82. [Google Scholar] [CrossRef]
- Laliberte, A.S.; Goforth, M.A.; Steele, C.M.; Rango, A. Multispectral Remote Sensing from Unmanned Aircraft: Image Processing Workflows and Applications for Rangeland Environments. Remote Sens. 2011, 3, 2529–2551. [Google Scholar] [CrossRef]
- Daughtry, C.S.T.; Walthall, C.L.; Kim, M.S.; De Colstoun, E.B.; McMurtrey Iii, J.E. Estimating corn leaf chlorophyll concentration from leaf and canopy reflectance. Remote Sens. Environ. 2000, 74, 229–239. [Google Scholar] [CrossRef]
- Mei, H.; Deng, X.; Hong, T.; Luo, X.; Deng, X. Early detection and grading of citrus Huanglongbing using hyperspectral imaging technique. Trans. CSAE 2014, 30, 140–147. [Google Scholar]
- Zarco-Tejada, P.J.; Berjón, A.; López-Lozano, R.; Miller, J.R.; Martín, P.; Cachorro, V.; González, M.R.; de Frutos, A. Assessing vineyard condition with hyperspectral indices: Leaf and canopy reflectance simulation in a row-structured discontinuous canopy. Remote Sens. Environ. 2005, 99, 271–287. [Google Scholar] [CrossRef]
- Jordan, C.F. Derivation of leaf area index from quality of light on the forest floor. Ecology 1969, 50, 663–666. [Google Scholar] [CrossRef]
- Merzlyak, M.N.; Gitelson, A.A.; Chivkunova, O.B.; Rakitin, V.Y. Non-destructive optical detection of pigment changes during leaf senescence and fruit ripening. Physiol. Plant. 1999, 106, 135–141. [Google Scholar] [CrossRef]
- Cui, W.; Xia, L.; Xie, X.; Pan, C. A model of dissolved oxygen in the Pearl River estuary based on measured spectrum. J. Guangzhou Univ. (Nat. Sci. Ed.) 2017, 16, 84–92. [Google Scholar]
- TASSAN, S. SeaWiFS potential for remote sensing of marine Trichodesmium at sub-bloom concentration. Int. J. Remote Sens. 1996, 16, 3619–3627. [Google Scholar] [CrossRef]
- Vogelmann, J.E.; Rock, B.N.; Moss, D.M. Red edge spectral measurements from sugar maple leaves. Int. J. Remote Sens. 1993, 14, 1563–1575. [Google Scholar] [CrossRef]
- Feng, L.; Hu, C.M.; Chen, X.L.; Tian, L.Q.; Chen, L.Q. Human Induced Turbidity Changes in Poyang Lake between 2000 and 2010: Observations from MODIS. Available online: https://agupubs.onlinelibrary.wiley.com/doi/abs/10.1029/2011JC007864 (accessed on 14 December 2019).
- Liu, J.; Zhang, Y.; Zhang, D.; Sun, Z.; Li, X.; Yan, J.; Zhao, R.; Zhang, F.; Zhou, X. Path analysis of interactional relationship between Chlorophyll-a and environmental factors in freshwater fishponds. Freshw. Fish. 2018, 48, 26–33. [Google Scholar]
- Ouni, H.; Kawachi, A.; Irie, M.; M’Barek, N.B.; Hariga-Tlatli, N.; Tarhouni, J. Development of water turbidity index (WTI) and seasonal characteristics of total suspended matter (TSM) spatial distribution in Ichkeul Lake, a shallow brackish wetland, Northern-East Tunisia. Environ. Earth Sci. 2019, 78, 228. [Google Scholar] [CrossRef]
- Huang, X.; Liu, X.; Zhang, L.A. Multichannel gray level co-occurrence matrix for multi/hyperspectral image texture representation. Remote Sens. 2014, 6, 8424–8445. [Google Scholar] [CrossRef]
- Krizhevsky, A.; Sutskever, I.; Hinton, G.E. Imagenet classification with deep convolutional neural networks. Commun. ACM 2017, 60, 84–90. [Google Scholar] [CrossRef]
- Guo, Y.W.; Yao, A.B.; Chen, Y.R. Dynamic network surgery for efficient DNNs. Advances in Neural Information Processing Systems. In Proceedings of the 30th Annual Conference on Neural Information Processing Systems, Barcelona, Spain, 5–10 December 2016; Cocrnell Univeristy: New York, NY, USA, 2017. [Google Scholar]












© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).