Structure Label Matrix Completion for PolSAR Image Classification


Abstract
:
1. Introduction
1.1. Related Works
1.2. Motivation and Contributions
- First, label matrix completion is introduced for the PolSAR image classification for the first time to the best of our knowledge. Label matrix completion solves a matrix inverse problem to obtain the classification result instead of the map from PolSAR data to the label field.
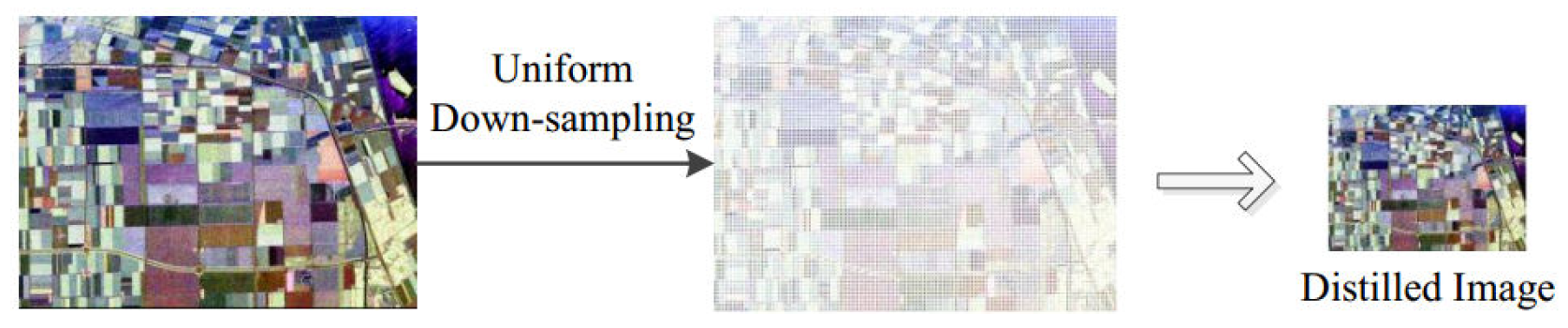
- Second, a uniform down-sampled PolSAR image is used to obtain the known labels for the entire label matrix. In this way, the heavy computational burden in semi-supervised and unsupervised classification methods is relieved.
- Third, the zeroth- and first-order label prior distributions are proposed to complete the entire label matrix with the known labels of the sampled PolSAR image. Thus, the final label matrix can be obtained with fewer labels known than traditional classification methods by this label prior to distribution. This results in state-of-the-art classification performance on both accuracy value and computation time.
2. Proposed Structure Label Matrix Completion Method for PolSAR Image Classification
2.1. From Classification to Label Matrix Completion
2.2. Completion of Label Matrix by Matrix Completion
2.3. Model Analysis
3. Optimization and Complexity Analysis
| Algorithm 1 Optimization of proposed method. |
| Input: PolSAR image raw feature data, down-sampled PolSAR image index , light classification network, and maximum iteration time Maxiter. |
| Main Loop: |
| Compute the prior distribution and observed label matrix with light classification network for the down-sampled PolSAR image to obtain |
| for to Maxiter do |
| Compute observed label matrix of observed information with index |
| Compute Laplace term of prior information with Equation (9) |
| Compute final label matrix with Equation (8) |
| Compute predicted label by maximizing Equation (8) |
| end for |
| Output: Classification result of predicted label. |
3.1. Optimization Process
3.2. Complex Analysis
4. Results
4.1. Parameter Analysis
4.2. Classification Performance with Different Down-Sampling Rates
4.3. Structure Prior for Label Matrix Completion
4.4. Classification Performance on PolSAR Data Sets
4.4.1. Dataset Flevoland from NASA/JPL AIRSAR
4.4.2. Dataset Oberpfaffenhofen from ESAR Airborne Platform
5. Conclusions and Future Work
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Lee, J.S.; Pottier, E. Polarimetric Radar Imaging: From Basics to Applications; CRC Press: Boca Raton, FL, USA, 2009; pp. 268–269. [Google Scholar]
- Lee, J.S.; Grunes, M.R.; Ainsworth, T.L.; Du, L.J.; Schuler, D.L.; Cloude, S.R. Unsupervised classification using polarimetric decomposition and the complex wishart classifier. IEEE Trans. Geosci. Remote Sens. 2002, 37, 2249–2258. [Google Scholar]
- Lee, J.S.; Grunes, M.R.; Kwok, R. Classification of multi-look polarimetric sar imagery based on complex wishart distribution. Int. J. Remote Sens. 1994, 15, 2299–2311. [Google Scholar] [CrossRef]
- Pottier, E. The h/a/ polarimetric decomposition approach applied to polsar data processing. In Proceedings of the PIERS Workshop on Advanced in Radar Methods, Baveno, Italy, 20–22 July 1998. [Google Scholar]
- Frery, A.C.; Correia, A.H.; Freitas, C.D.C. Classifying multifrequency fully polarimetric imagery with multiple sources of statistical evidence and contextual information. IEEE Trans. Geosci. Remote Sens. 2007, 45, 3098–3109. [Google Scholar] [CrossRef]
- Bo, R.; Hou, B.; Jin, Z.; Jiao, L. Unsupervised classification of polarimetirc sar image via improved manifold regularized low-rank representation with multiple features. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2007, 10, 580–595. [Google Scholar]
- Chi, L.; Liao, W.; Li, H.C.; Fu, K.; Philips, W. Unsupervised classification of multilook polarimetric sar data using spatially variant wishart mixture model with double constraints. IEEE Trans. Geosci. Remote Sens. 2018, 56, 5600–5613. [Google Scholar]
- Kong, J.A. K-distribution and polarimetric terrain radar clutter. J. Electromagn. Waves Appl. 1989, 3, 747–768. [Google Scholar]
- Bombrun, L.; Beaulieu, J.M. Fisher distribution for texture modeling of polarimetric sar data. IEEE Geosci. Remote Sens. Lett. 2008, 5, 512–516. [Google Scholar] [CrossRef]
- Fernandez-Michelli, J.I.; Areta, J.A.; Hurtado, M.; Muravchik, C.H. Polarimetric sar image classification using em method and model. In Proceedings of the 2015 XVI Workshop on Information Processing and Control (RPIC), Cordoba, Argentina, 6–9 October 2015. [Google Scholar]
- Xu, Q.; Chen, Q.; Xing, X.; Yang, S.; Liu, X. Polarimetric sar images classification based on l distribution and spatial context. In Proceedings of the 2016 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Beijing, China, 10–15 July 2016; pp. 4976–4979. [Google Scholar]
- Li, H.C.; Sun, X.; Emery, W.J. H distribution for multilook polarimetric sar data. IEEE Geosci. Remote Sens. Lett. 2017, 14, 489–493. [Google Scholar] [CrossRef]
- Hulst, H.C.V.D.; Twersky, V. Light Scattering by Small Particles; Wiley: Hoboken, NJ, USA, 1957. [Google Scholar]
- Freeman, A.; Durden, S.L. Three-component scattering model to describe polarimetric sar data. Proc. SPIE 1993, 1748, 213–224. [Google Scholar]
- Yamaguchi, Y.; Moriyama, T.; Ishido, M.; Yamada, H. Fourcomponent scattering model for polarimetric sar image decomposition. Tech. Rep. IEICE SANE 2005, 104, 1699–1706. [Google Scholar]
- Holm, W.A. On radar polarization mixed target state decomposition techniques. In Proceedings of the 1988 IEEE National Radar Conference, Ann Arbor, MI, USA, 20–21 April 1988. [Google Scholar]
- Cloude, S.R.; Pottier, E. A review of target decomposition theorems in radar polarimetry. IEEE Trans. Geosci. Remote Sens. 1996, 34, 498–518. [Google Scholar] [CrossRef]
- Zhou, G.; Cui, Y.; Chen, Y.; Yang, J.; Rashvand, H.; Yamaguchi, Y. Linear feature detection in polarimetric sar images. IEEE Trans. Geosci. Remote Sens. 2011, 49, 1453–1463. [Google Scholar] [CrossRef]
- Tao, M.; Zhou, F.; Liu, Y.; Zhang, Z. Tensorial independent component analysis-based feature extraction for polarimetric sar data classification. IEEE Trans. Geosci. Remote Sens. 2015, 53, 2481–2495. [Google Scholar] [CrossRef]
- Redolfi, J.; Snchez, J.; Flesia, A.G. Fisher vectors for polsar image classification. IEEE Geosci. Remote Sens. Lett. 2017, 14, 2057–2061. [Google Scholar] [CrossRef]
- Hou, B.; Wu, Q.; Wen, Z.; Jiao, L. Robust semisupervised classification for polsar image with noisy labels. IEEE Trans. Geosci. Remote Sens. 2017, 55, 6440–6455. [Google Scholar] [CrossRef]
- Chen, S.W.; Tao, C.S. Polsar image classification using polarimetric-feature-driven deep convolutional neural network. IEEE Geosci. Remote Sens. Lett. 2018, 15, 627–631. [Google Scholar] [CrossRef]
- Wu, W.; Li, H.; Zhang, L.; Li, X.; Guo, H. High-resolution polsar scene classification with pretrained deep convnets and manifold polarimetric parameters. IEEE Trans. Geosci. Remote Sens. 2018, 56, 6159–6168. [Google Scholar] [CrossRef]
- Lin, H.; Shi, Z.; Zou, Z. Fully convolutional network with task partitioning for inshore ship detection in optical remote sensing images. IEEE Geosci.Remote Sens. Lett. 2017, 14, 1665–1669. [Google Scholar] [CrossRef]
- Mohammadimanesh, F.; Salehi, B.; Mahdianpari, M.; Gill, E.; Molinier, M. A new fully convolutional neural network for semantic segmentation of polarimetric SAR imagery in complex land cover ecosystem. ISPRS J. Photogramm. Remote Sens. 2019, 151, 223–236. [Google Scholar] [CrossRef]
- Qian, W.; Hou, B.; Wen, Z.; Jiao, L. Variational learning of mixture wishart model for polsar image classification. IEEE Trans. Geosci. Remote Sens. 2019, 57, 141–154. [Google Scholar]
- Liu, C.; Yin, J.; Yang, J.; Gao, W. Classification of multi-frequency polarimetric sar images based on multi-linear subspace learning of tensor objects. Remote Sens. 2015, 7, 9253–9268. [Google Scholar] [CrossRef] [Green Version]
- Ince, T. Polarimetric sar image classification using a radial basis function neural network. In Proceedings of the Electromagnetic Research Symposium (PIERS), Cambridge, MA, USA, 5–8 July 2010. [Google Scholar]
- Lardeux, C.; Frison, P.L.; Tison, C.; Souyris, J.C.; Stoll, B.; Fruneau, B.; Rudant, J.P. Support vector machine for multifrequency sar polarimetric data classification. IEEE Trans. Geosci. Remote Sens. 2009, 47, 4143–4152. [Google Scholar] [CrossRef]
- Loosvelt, L.; Peters, J.; Skriver, H.; Baets, B.D.; Verhoest, N.E. Impact of reducing polarimetric sar input on the uncertainty of crop classifications based on the random forests algorithm. IEEE Trans. Geosci. Remote Sens. 2012, 50, 4185–4200. [Google Scholar] [CrossRef]
- Shi, L.; Zhang, L.; Yang, J.; Zhang, L.; Li, P. Supervised graph embedding for polarimetric sar image classification. IEEE Geosci. Remote Sens. Lett. 2013, 10, 216–220. [Google Scholar] [CrossRef]
- Zhou, Y.; Wang, H.; Xu, F.; Jin, Y.Q. Polarimetric sar image classification using deep convolutional neural networks. IEEE Geosci. Remote Sens. Lett. 2017, 13, 1935–1939. [Google Scholar] [CrossRef]
- Cloude, S.R.; Pottier, E. An entropy based classification scheme for land applications of polarimetric sar. IEEE Trans. Geosci. Remote Sens. 1997, 35, 68–78. [Google Scholar] [CrossRef]
- Formont, P.; Pascal, F.; Vasile, G.; Ovarlez, J.P.; Ferro-Famil, L. Statistical classification for heterogeneous polarimetric sar images. IEEE J. Sel. Top. Signal Process. 2011, 5, 567–576. [Google Scholar] [CrossRef] [Green Version]
- Ersahin, K.; Cumming, I.G.; Ward, R.K. Segmentation and classification of polarimetric sar data using spectral graph partitioning. IEEE Trans. Geosci. Remote Sens. 2009, 48, 164–174. [Google Scholar] [CrossRef] [Green Version]
- Lin, L.Q.; Song, H.; Huang, P.P.; Yang, W.; Xu, X. Unsupervised classification of polsar data using large scale spectral clustering. In Proceedings of the 2014 IEEE Geoscience and Remote Sensing Symposium, Quebec City, QC, Canada, 13–18 July 2014; p. 2817. [Google Scholar]
- Luo, S.; Ling, T.; Yan, C. A multi-region segmentation method for sar images based on the multi-texture model with level sets. IEEE Trans. Image Process. 2018, 27, 2560–2574. [Google Scholar] [CrossRef]
- Xiang, D.; Ban, Y.; Wei, W.; Yi, S. Adaptive superpixel generation for polarimetric sar images with local iterative clustering and sirv model. IEEE Trans. Geosci. Remote Sens. 2017, 55, 3115–3131. [Google Scholar] [CrossRef]
- Wen, Z.; Hou, B.; Jiao, L. Joint sparse recovery with semi-supervised music. IEEE Signal Process. Lett. 2017, 24, 629–633. [Google Scholar] [CrossRef] [Green Version]
- Krizhevsky, A.; Sutskever, I.; Hinton, G.E. ImageNet Classification with Deep Convolutional Neural Networks. Available online: https://papers.nips.cc/paper/4824-imagenet-classification-with-deep-convolutional-neural-networks.pdf (accessed on 26 November 2019).
- Jie, Z.; Shan, S.; Kan, M.; Chen, X. Coarse-to-fine auto-encoder networks (cfan) for real-time face alignment. In ECCV; Springer: Berlin/Heidelberg, Germany, 2014. [Google Scholar]
- Russakovsky, O.; Deng, J.; Su, H.; Krause, J.; Satheesh, S.; Ma, S.; Huang, Z.; Karpathy, A.; Khosla, A.; Bernstein, M. Imagenet large scale visual recognition challenge. Int. J. Comput. Vis. 2015, 115, 211–252. [Google Scholar] [CrossRef] [Green Version]
- Liu, H.; Wang, Y.; Yang, S.; Shuang, W.; Jie, F.; Jiao, L. Large polarimetric sar data semi-supervised classification with spatial-anchor graph. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2016, 9, 1439–1458. [Google Scholar] [CrossRef]
- Bi, H.; Sun, J.; Xu, Z. A graph-based semisupervised deep learning model for polsar image classification. IEEE Trans. Geosci. Remote Sens. 2018, 57, 2116–2132. [Google Scholar] [CrossRef]
- Ding, P.; Zhang, Y.; Deng, W.J.; Jia, P.; Kuijper, A. A light and faster regional convolutional neural network for object detection in optical remote sensing images. ISPRS J. Photogramm. Remote Sens. 2018, 141, 208–218. [Google Scholar] [CrossRef]
- Wu, Y.; Ji, K.; Yu, W.; Su, Y. Region-based classification of polarimetric sar images using wishart mrf. IEEE Geosci. Remote Sens. Lett. 2008, 5, 668–672. [Google Scholar] [CrossRef]
- Wong, R.K.W.; Lee, T.C.M. Matrix completion with noisy entries and outliers. J. Mach. Learn. Res. 2017, 18, 5404–5428. [Google Scholar]
- Cherukuri, V.; Guo, T.; Schiff, S.J.; Monga, V. Deep Mr image super-resolution using structural priors. In Proceedings of the 2018 25th IEEE International Conference on Image Processing (ICIP), Athens, Greece, 7–10 October 2018. [Google Scholar]
- Liu, F.; Jiao, L.; Hou, B.; Yang, S. Pol-sar image classification based on wishart dbn and local spatial information. IEEE Trans. Geosci. Remote Sens. 2016, 54, 3292–3308. [Google Scholar] [CrossRef]
- Wu, Q.; Hou, B.; Wen, Z.; Ren, L.; Ren, B.; Jiao, L. Cost-sensitive Latent Space Learning for Imbalanced PolSAR Image Classification. IEEE Trans. Geosci. Remote Sens. 2019. under review. [Google Scholar]
- Zhang, Z.; Wang, H.; Xu, F.; Jin, Y.Q. Complex-valued convolutional neural network and its application in polarimetric sar image classification. IEEE Trans. Geosci. Remote Sens. 2017, 7177–7188. [Google Scholar] [CrossRef]
- Jie, G.; Ma, X.; Fan, J.; Wang, H. Semisupervised classification of polarimetric sar image via superpixel restrained deep neural network. IEEE Geosci. Remote Sens. Lett. 2017, 15, 122–126. [Google Scholar]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Land Cover | Peas | Forest | Grasses | Wheat | Barley | Stem Beans | Bare Soil | Lucerne |
|---|---|---|---|---|---|---|---|---|
| sampling rate | 381 | 718 | 276 | 682 | 320 | 242 | 208 | 411 |
| sampling rate | 593 | 1146 | 432 | 1006 | 468 | 397 | 320 | 636 |
| sampling rate | 1037 | 2001 | 801 | 1817 | 816 | 720 | 572 | 1152 |
| sampling rate | 2433 | 4551 | 1795 | 4120 | 1910 | 1544 | 1300 | 2556 |
| All pixels | 9582 | 18,044 | 6948 | 16,386 | 7595 | 5986 | 5109 | 7628 |
| Wheat2 | Water | Beet | Rapeseed | Potatoes | Wheat3 | Buildings | Total | Time (s) |
| 458 | 530 | 416 | 543 | 646 | 908 | 23 | 6762 | 13.765 |
| 802 | 652 | 347 | 858 | 954 | 1360 | 42 | 10,368 | 25.175 |
| 1201 | 1515 | 1140 | 1545 | 1764 | 2446 | 79 | 18,606 | 46.056 |
| 2790 | 3308 | 2495 | 3450 | 4051 | 5583 | 177 | 42,063 | 87.601 |
| 11,159 | 9904 | 10,033 | 6671 | 16,156 | 22,241 | 735 | 153,590 | 351.557 |
| Sampling Rate | Training | Peas | Forest | Grasses | Wheat | Barley | Stem Beans | Bare Soil | Lucerne | |
| 0.4% | 0.90 | 0.98 | 0.72 | 0.91 | 0.99 | 0.95 | 0.92 | 0.89 | ||
| 0.6% | 0.93 | 1.00 | 0.86 | 0.99 | 0.97 | 0.95 | 0.98 | 0.94 | ||
| 1.1% | 0.97 | 1.00 | 0.98 | 0.98 | 1.00 | 0.96 | 0.99 | 0.94 | ||
| 2.5% | 1.00 | 1.00 | 0.99 | 1.00 | 1.00 | 0.99 | 1.00 | 0.97 | ||
| Sampling Rate | Training | Wheat2 | Water | Beet | Rapeseed | Potatoes | Wheat3 | Buildings | Total | |
| OA | ||||||||||
| 0.4% | 0.89 | 0.98 | 0.84 | 0.95 | 0.93 | 0.97 | 0.13 | 0.93 | 0.92 | |
| 0.6% | 0.95 | 0.98 | 0.94 | 0.98 | 0.97 | 0.96 | 0.44 | 0.96 | 0.96 | |
| 1.1% | 0.93 | 0.99 | 0.95 | 0.93 | 0.99 | 1.00 | 0.85 | 0.97 | 0.97 | |
| 2.5% | 0.98 | 1.00 | 0.99 | 1.00 | 1.00 | 1.00 | 0.96 | 0.99 | 0.99 | |
| Training | Peas | Forest | Grasses | Wheat | Barley | Stem Beans | Bare Soil | Lucerne | ||
| VMW | 300 | 0.44 | 0.54 | 0.28 | 0.38 | 0.74 | 0.60 | 0.11 | 0.57 | |
| SVM | 5% | 0.50 | 0.66 | 0.19 | 0.59 | 0.80 | 0.14 | 0.64 | 0.62 | |
| RS | 5% | 0.96 | 0.94 | 0.60 | 0.91 | 1.00 | 0.54 | 0.95 | 0.70 | |
| RV-CNN | 10% | 0.97 | 0.96 | 0.94 | 0.93 | 0.86 | 0.98 | 1.00 | 0.95 | |
| CV-CNN | 10% | 0.99 | 0.97 | 0.90 | 0.95 | 0.95 | 0.99 | 0.99 | 0.98 | |
| SAG | 1% | 0.93 | 0.86 | 0.65 | 0.90 | 0.96 | 0.94 | 0.96 | 0.90 | |
| SRDNN | 1% | 0.95 | 0.97 | 0.87 | 0.95 | 0.95 | 0.97 | 0.94 | 0.95 | |
| GSS | 5% | 0.99 | 0.95 | 0.97 | 0.98 | 0.99 | 1.00 | 1.00 | 0.99 | |
| CLSL | 10% | 0.99 | 1.00 | 0.97 | 1.00 | 0.99 | 1.00 | 1.00 | 0.98 | |
| SLMC | 2.5% | 1.00 | 1.00 | 0.99 | 1.00 | 1.00 | 0.99 | 1.00 | 0.97 | |
| Training | Wheat2 | Water | Beet | Rapeseed | Potatoes | Wheat3 | Buildings | Total | ||
| OA | ||||||||||
| VMW | 300 | 0.31 | 0.88 | 0.56 | 0.35 | 0.26 | 0.56 | 0.87 | 0.48 | 0.47 |
| SVM | 5% | 0.45 | 0.76 | 0.74 | 0.31 | 0.53 | 0.75 | 0.37 | 0.58 | 0.56 |
| RS | 5% | 0.70 | 0.59 | 0.99 | 0.46 | 0.83 | 0.98 | 0.35 | 0.81 | 0.80 |
| RV-CNN | 10% | 0.97 | 0.99 | 0.98 | 0.92 | 0.96 | 0.96 | 0.80 | 0.95 | \ |
| CV-CNN | 10% | 0.94 | 1.00 | 0.97 | 0.92 | 0.97 | 0.97 | 0.83 | 0.96 | \ |
| SAG | 1% | 0.77 | 0.92 | 0.94 | 0.81 | 0.87 | 0.91 | 0.78 | 0.88 | \ |
| SRDNN | 1% | 0.90 | 0.99 | 0.92 | 0.92 | 0.94 | 0.97 | 0.81 | 0.95 | 0.94 |
| GSS | 5% | 0.99 | 1.00 | 0.99 | 0.99 | 0.99 | 0.99 | 1.00 | 0.99 | \ |
| CLSL | 10% | 0.99 | 1.00 | 0.99 | 0.98 | 0.99 | 1.00 | 0.97 | 0.99 | 0.99 |
| SLMC | 2.5% | 0.98 | 1.00 | 0.99 | 1.00 | 1.00 | 1.00 | 0.96 | 0.99 | 0.99 |
| Method | VMW | SVM | RS | RV-CNN | SAG | SRDNN | GSS | CLSL | SLMC |
|---|---|---|---|---|---|---|---|---|---|
| Time (s) | 311.56 | 631.52 | 610.27 | 334.69 | 21456 | 728.04 | 702 | 351.56 | 87.60 |
| Training Pixels | Built-Up Area | Woodland | Open Area | Total | |||
|---|---|---|---|---|---|---|---|
| OA | Time (s) | ||||||
| SVM | 5% | 0.44 | 0.76 | 0.95 | 0.79 | 0.77 | 1282.77 |
| RS | 5% | 0.75 | 0.95 | 0.93 | 0.89 | 0.89 | 1239.61 |
| RV-CNN | 1% | 0.86 | 0.85 | 0.93 | 0.90 | \ | 679.84 |
| CV-CNN | 1% | 0.91 | 0.92 | 0.95 | 0.93 | \ | \ |
| SRDNN | 0.5% | 0.90 | 0.94 | 0.93 | 0.93 | 0.88 | 1478.83 |
| CLSL | 1% | 0.83 | 0.93 | 0.96 | 0.93 | 0.92 | 714.11 |
| SLMC | 0.15% | 0.89 | 0.92 | 0.96 | 0.94 | 0.93 | 11.16 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wu, Q.; Hou, B.; Wen, Z.; Ren, Z.; Ren, B.; Jiao, L. Structure Label Matrix Completion for PolSAR Image Classification. Remote Sens. 2020, 12, 459. https://doi.org/10.3390/rs12030459
Wu Q, Hou B, Wen Z, Ren Z, Ren B, Jiao L. Structure Label Matrix Completion for PolSAR Image Classification. Remote Sensing. 2020; 12(3):459. https://doi.org/10.3390/rs12030459
Chicago/Turabian StyleWu, Qian, Biao Hou, Zaidao Wen, Zhongle Ren, Bo Ren, and Licheng Jiao. 2020. "Structure Label Matrix Completion for PolSAR Image Classification" Remote Sensing 12, no. 3: 459. https://doi.org/10.3390/rs12030459
APA StyleWu, Q., Hou, B., Wen, Z., Ren, Z., Ren, B., & Jiao, L. (2020). Structure Label Matrix Completion for PolSAR Image Classification. Remote Sensing, 12(3), 459. https://doi.org/10.3390/rs12030459