Hardware Efficient Solutions for Wireless Air Pollution Sensors Dedicated to Dense Urban Areas


Abstract
:
1. Introduction
2. Related Works
2.1. Air Pollution Monitoring Systems
2.2. Air Pollution Sensors
3. Materials and Methods
3.1. Octave/Matlab Software Development Environment
3.2. Chip Design and Verification
3.3. Data Used in Testing the Proposed Algorithm
4. Proposed Contribution to Air Polution Sensor Development
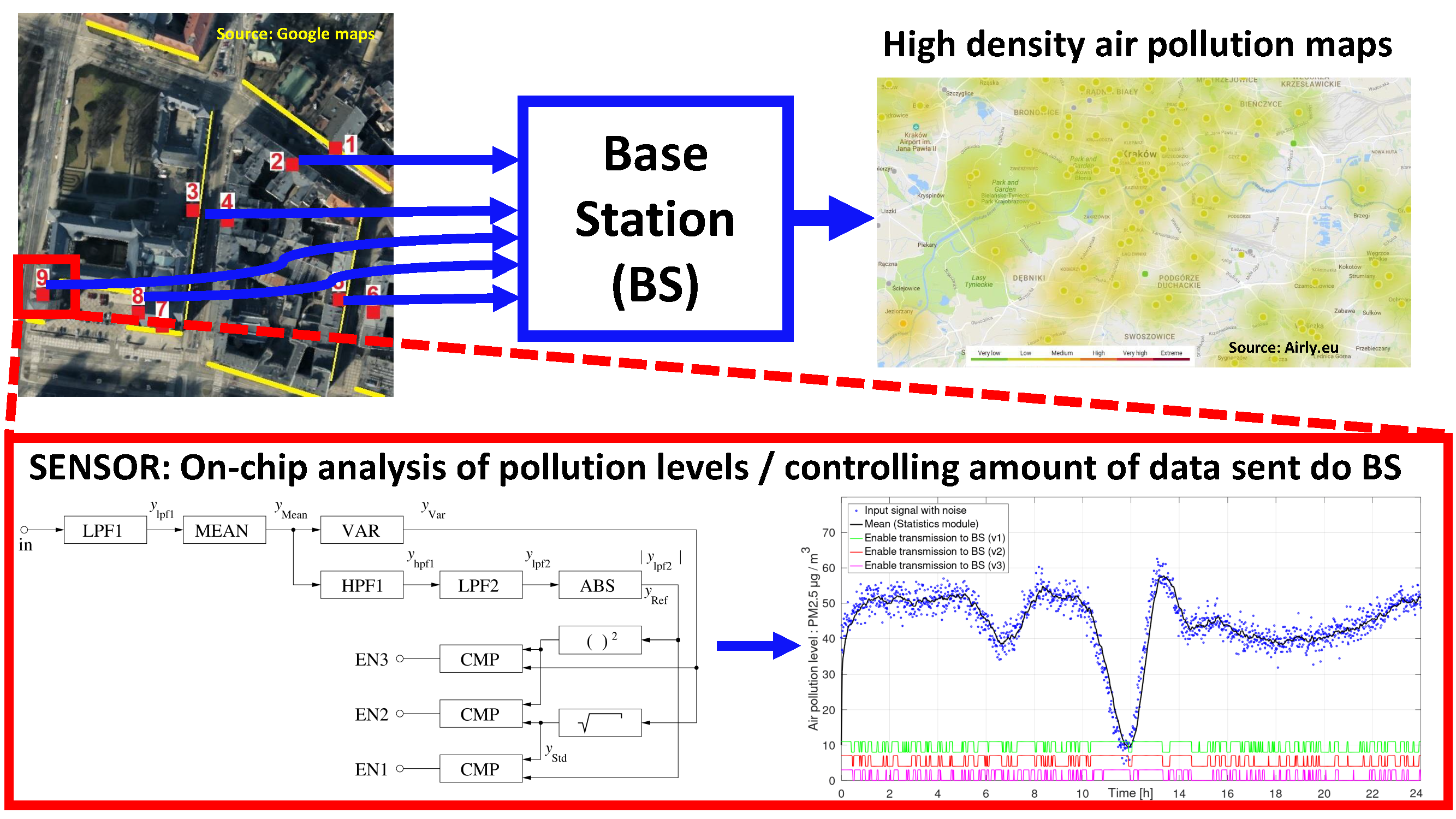
4.1. An Air Pollution Monitoring System and High-Spatial-Density Maps with Redundancies
4.2. Circuit Development
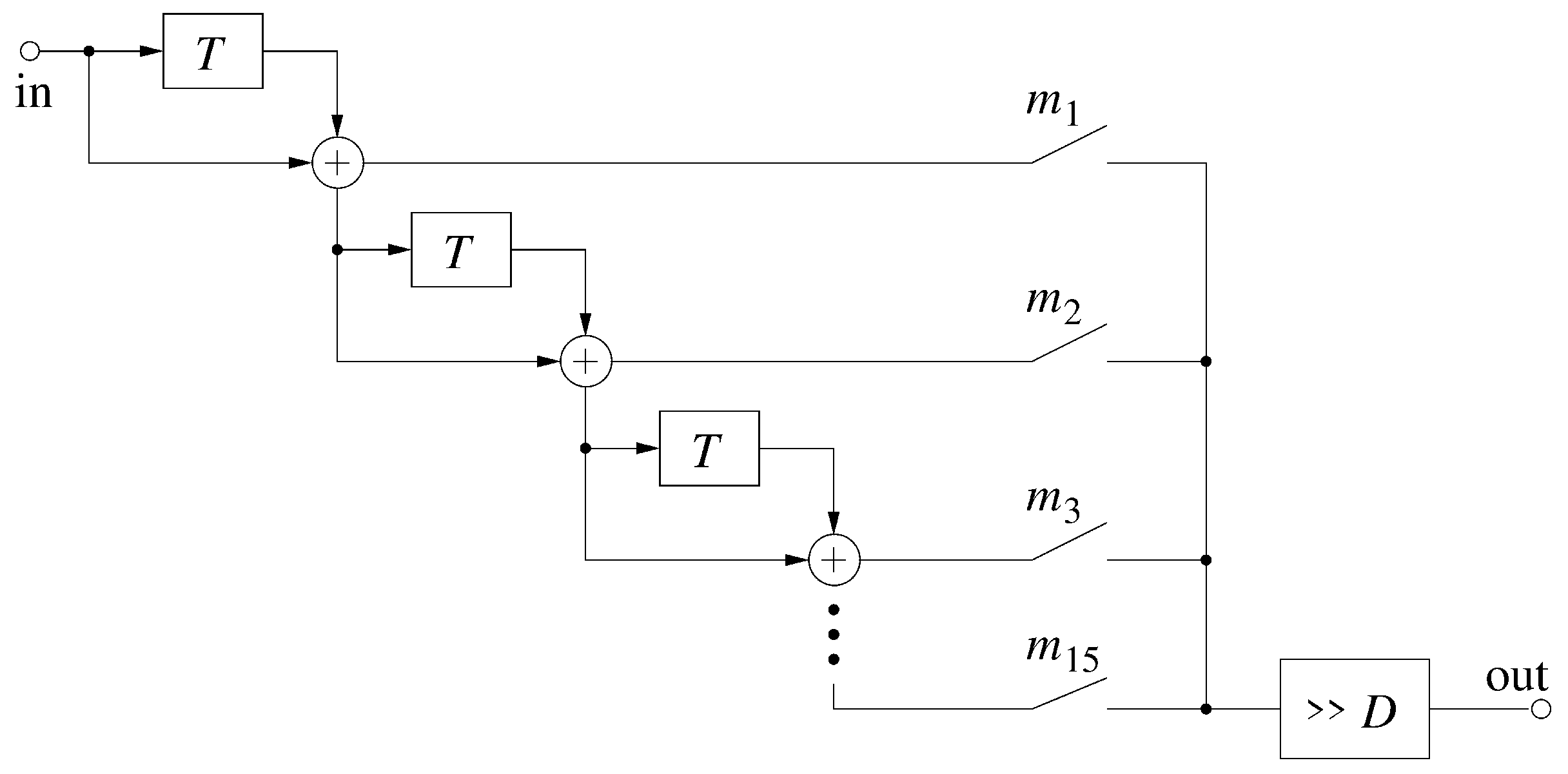
4.2.1. Filtering
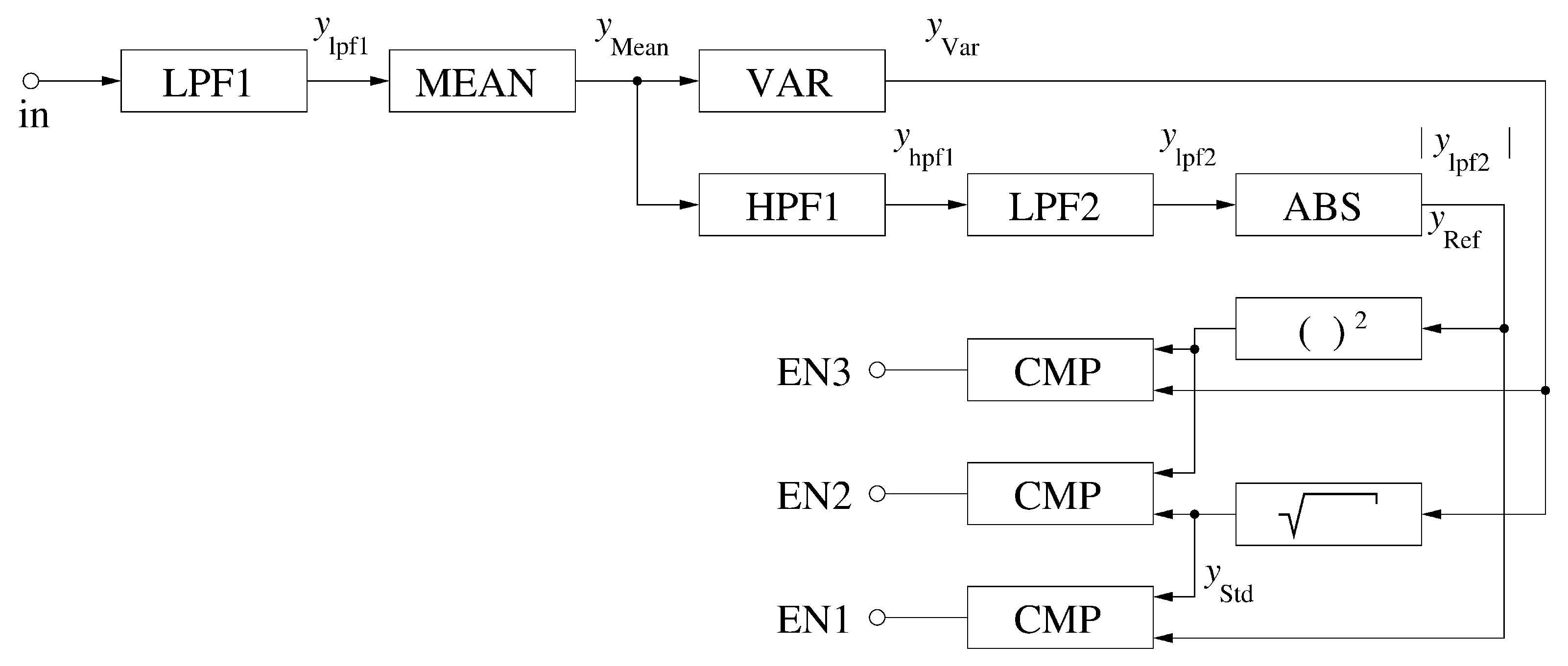
4.2.2. Hardware-Efficient Computation of Selected Statistical Quantities
4.2.3. Current-Mode, Low Chip Area ADC
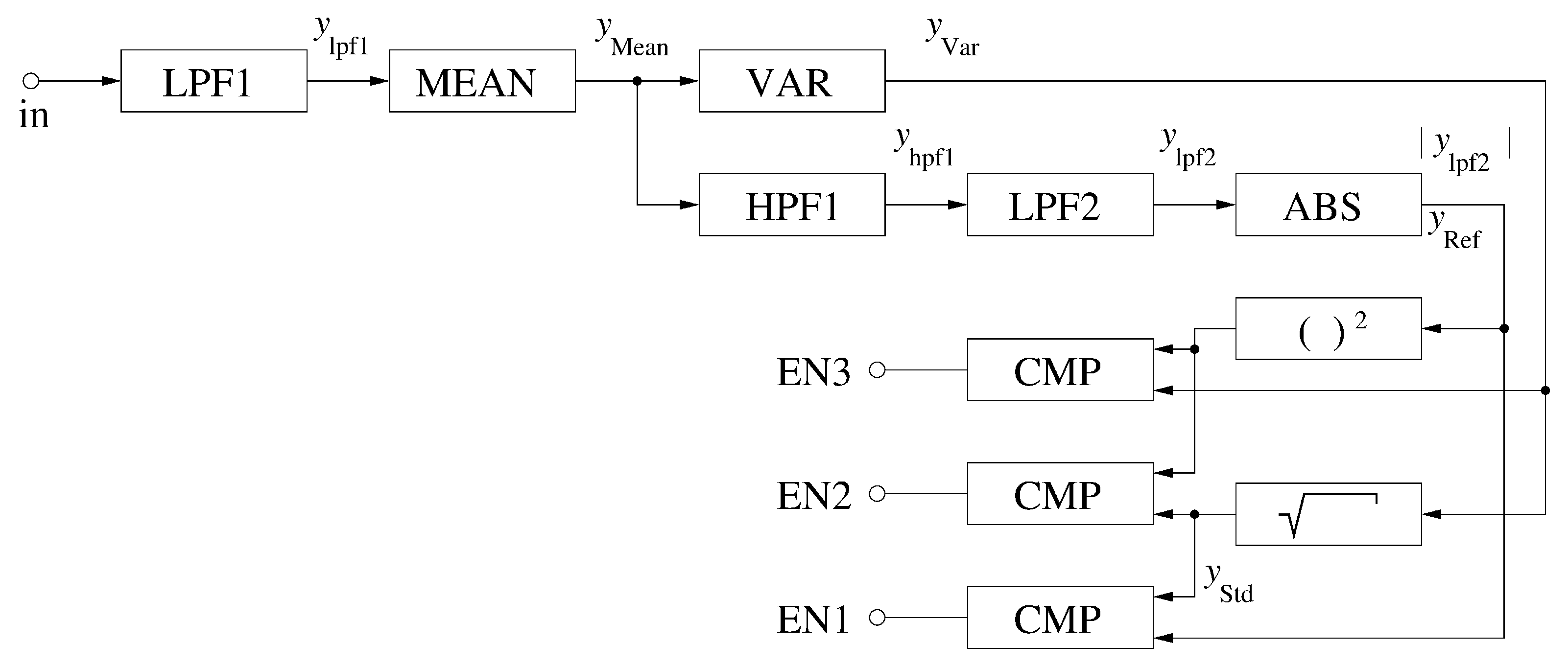
4.3. On-Chip Data Analysis Algorithm for Air Pollution Sensors
5. Results
5.1. Laboratory Tests of the Current Mode DAC and ADC
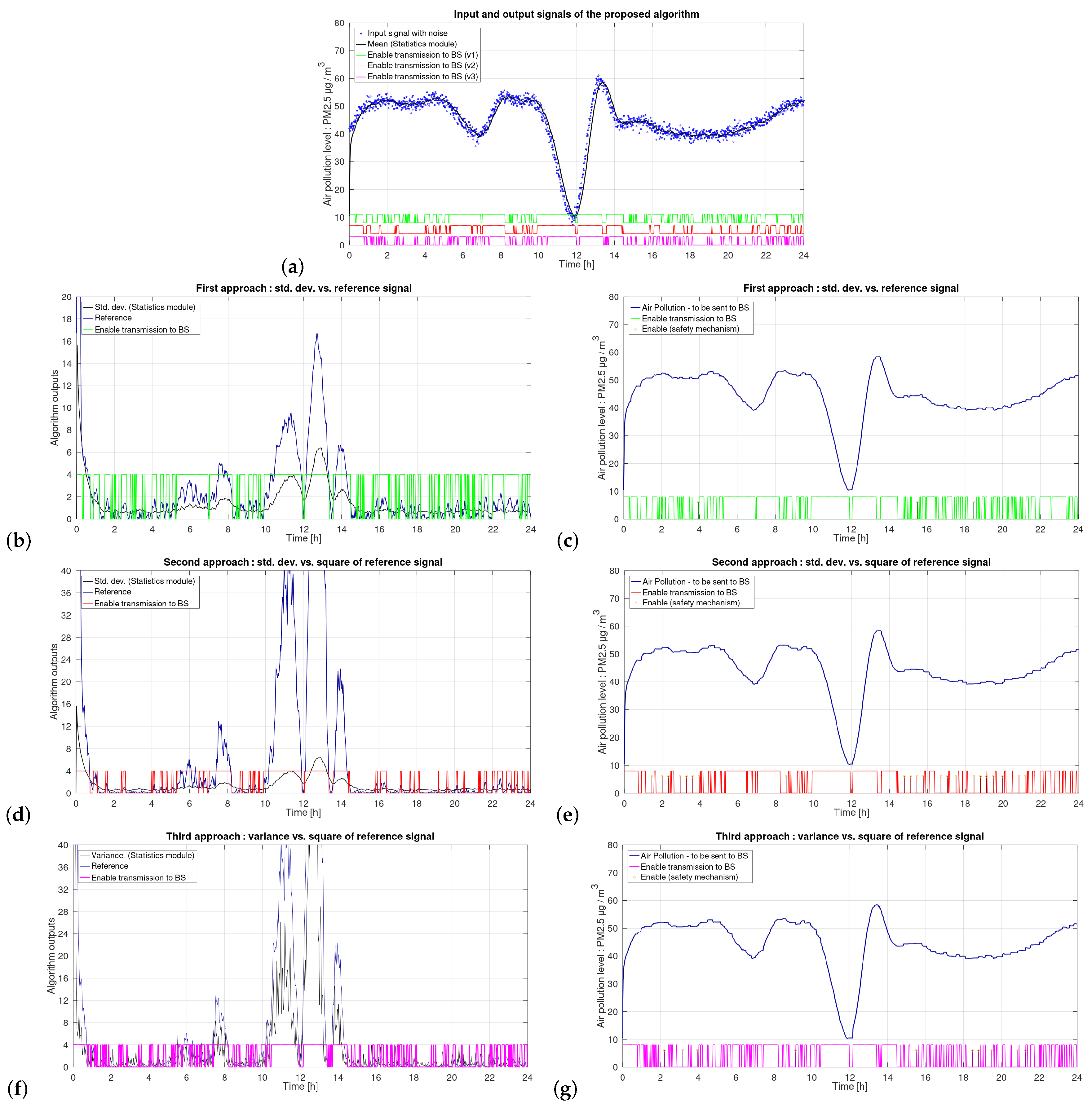
5.2. Verification of the Proposed on-Chip Algorithm
6. Discussion
6.1. Current-Mode Digital-to-Analogue Converter
6.2. The Proposed on-Chip Signal Processing Algorithm
6.3. Circuit Complexity and Energy Consumption
Limitations and Future Work
7. Conclusions
Author Contributions
Funding
Conflicts of Interest
Abbreviations
| ABS | Absolute Operation |
| ADC | Analog-to-Digital Conversion |
| ANN | Artificial Neural Networks |
| ASIC | Application Specific Integrated Circuit |
| BS | Base station |
| CMOS | Complementary Metal Oxide Semiconductor |
| CMP | Comparator |
| CPLD | Complex Programmable Logic Device |
| DAC | Digital-To-Analog Converter |
| EN | Enable |
| FIR | Finite Impulse Response (Filter) |
| FPGA | Field Programmable Gate Array |
| HPF | High-Pass Filter |
| I/O | Input–Output |
| IIR | Infinite Impulse Response (Filter) |
| IoT | Internet Of Things |
| ITS | Intelligent Transportation System |
| LPF | Low-Pass Filter |
| LVS | Layout-Vs-Schematics |
| MUX | Multiplexer |
| NMOS | N-type Metal-Oxide-Semiconductor (transistor) |
| OpAmp | Operational Amplifier |
| PCB | Printed Circuit Board |
| PM | Particulate Matter |
| PMOS | P-type Metal-Oxide-Semiconductor (transistor) |
| RF | Radio-Frequency |
| SAR | Successive Approximation Register (ADC) |
| SMD | Solidly Mounted Resonator |
| SoC | System-On-Chip |
| VAR | Variance |
| WHO | World Health Organization |
| WSN | Wireless Sensor Network |
References
- United States Environmental Protection Agency. Particulate Matter (PM) Basics. Available online: https://www.epa.gov/pm-pollution/particulate-matter-pm-basics (accessed on 12 February 2020).
- Guerreiro, C.B.B.; Horalek, J.; de Leeuw, F.; Couvidatd, F. Benzo(a)pyrene in Europe: Ambient air concentrations, populationexposure and health effects. Environ. Pollut. 2016, 214, 657–667. [Google Scholar] [CrossRef]
- Verma, R.; Vinoda, K.S.; Papireddy, M.; Gowda, A.N.S. Toxic Pollutants from Plastic Waste—A Review. Procedia Environ. Sci. 2016, 35, 701–708. [Google Scholar]
- Ayotte, P.; Dewailly, E.; Bruneau, S.; Careau, H. Arctic air pollution and human health: What effects should be expected? Sci. Total. Environ. 1995, 160–161, 529–537. [Google Scholar] [CrossRef]
- Liu, H.Y.; Dunea, D.; Iordache, S.; Pohoata, A. A Review of Airborne Particulate Matter Effects on Young Children’s Respiratory Symptoms and Diseases. Atmosphere 2018, 9, 150. [Google Scholar] [CrossRef] [Green Version]
- D’Amato, G.; Vitale, C.; De Martino, A.; Viegi, G.; Lanza, M.; Molino, A.; Sanduzzi, A.; Vatrella, A.; Annesi-Maesano, I.; D’Amato, M. Effects on asthma and respiratory allergy of Climate change and air pollution. Multidiscip. Respir. Med. 2015, 10, 39. [Google Scholar] [CrossRef]
- British Heart Foundation. Available online: https://www.bhf.org.uk (accessed on 12 February 2020).
- Meo, S.A.; Suraya, F. Effect of environmental air pollution on cardiovascular diseases. Eur. Rev. Med Pharmacol. Sci. 2015, 19, 4890–4897. [Google Scholar]
- World Health Organization. WHO Global Ambient Air Quality Database (update 2018). Available online: http://www.who.int/airpollution/data/en/ (accessed on 12 February 2020).
- European Commission-Environment-Air. Air Quality Standards. Available online: https://ec.europa.eu/environment/air/quality/standards.htm (accessed on 12 February 2020).
- Criteria Air Pollutants. NAAQS Table. Available online: https://www.epa.gov/criteria-air-pollutants/naaqs-table (accessed on 12 February 2020).
- European Committee for Standardization. Available online: https://www.cen.eu/news/brochures/brochures/AR2013_CEN_EN_final.pdf (accessed on 12 February 2020).
- Ambient Air—Standard Gravimetric Measurement Method for the Determination of the PM10 or PM2.5 Mass Concentration of Suspended Particulate Matter, EN 12341:2014. Available online: http://store.uni.com/catalogo/en-12341-2014 (accessed on 12 February 2020).
- Chief Inspectorate for Environmental Protection. Available online: http://powietrze.gios.gov.pl/pjp/current (accessed on 12 February 2020).
- Intelligent Air Quality Monitoring System, “Map of air quality by Airly”. Available online: https://airly.eu/map/en/ (accessed on 12 February 2020).
- Kaivonen, S.; Ngai, E.C.-H. Real-time air pollution monitoring with sensors on city bus. Digit. Commun. Netw. 2019, 6, 23–30. [Google Scholar]
- Maag, B.; Zhou, Z.; Thiele, L. W-Air: Enabling Personal Air Pollution Monitoring on Wearables. Proc. ACM Interactive Mobile Wearable Ubiquitous Technol. 2018, 2, 24.1–24.25. [Google Scholar] [CrossRef]
- Johnsen, F.T. Using Publish/Subscribe for Short-lived IoT Data. In Proceedings of the 2018 Federated Conference on Computer Science and Information Systems, Annals of Computer Science and Information Systems, Poznań, Poland, 9–12 September 2018; Volume 15, pp. 645–649. [Google Scholar]
- Cypress Semiconductor. Lowest-Power Energy Harvesting Power Management ICs for Battery-Free Wireless Sensor Nodes. Available online: https://www.cypress.com (accessed on 12 February 2020).
- Bosse, S. Smart Micro-scale Energy Management and Energy Distribution in Decentralized Self-Powered Networks Using Multi-Agent Systems. In Proceedings of the 2018 Federated Conference on Computer Science and Information Systems, Annals of Computer Science and Information Systems, Poznań, Poland, 9–12 September 2018; Volume 15, pp. 203–213. [Google Scholar]
- Loubet, G.; Takacs, A.; Dragomirescu, D. Implementation of a Battery-Free Wireless Sensor for Cyber-Physical Systems Dedicated to Structural Health Monitoring Applications. IEEE Access 2019, 7, 24679–24690. [Google Scholar]
- La Rosa, R.; Zoppi, G.; Di Donato, L.; Sorbello, G.; Di Carlo, C.A.; Livreri, P. A battery-free smart sensor powered with RF Energy. In Proceedings of the 2018 IEEE 4th International Forum on Research and Technology for Society and Industry (RTSI), Palermo, Italy, 10–13 September 2018; pp. 1–4. [Google Scholar]
- Texas Instruments. PM2.5 and PM10 Particle Sensor Analog Front-End for Air Quality Monitoring Reference Design. Available online: http://www.ti.com/tool/TIDA-00378 (accessed on 12 February 2020).
- Thomas, S.; Villa-López, F.H.; Theunis, J.; Peters, J.; Cole, M.; Gardner, J.W. Particle Sensor Using Solidly Mounted Resonators. IEEE Sens. J. 2016, 16, 2282–2289. [Google Scholar] [CrossRef] [Green Version]
- Ciccarella, P.; Carminati, M.; Sampietro, M.; Ferrari, G. Multichannel 65 zF rms Resolution CMOS Monolithic Capacitive Sensor for Counting Single Micrometer-Sized Airborne Particles on Chip. IEEE J. Solid-State Circuits 2016, 51, 2545–2553. [Google Scholar] [CrossRef]
- Carminati, M.; Ciccarella, P.; Sampietro, M.; Ferrari, G. Single-Chip CMOS Capacitive Sensor for Ubiquitous Dust Detection and Granulometry with Sub-micrometric Resolution; Springer: Cham, Switzerland, 2018; pp. 8–18. [Google Scholar]
- Chiang, C.; Huang, S.; Liu, G. A CMOS particulate matter 2.5 (PM2.5) concentration to frequency converter with calibration circuits for air quality monitoring applications. In Proceedings of the 2016 IEEE International Conference on Mechatronics and Automation, Harbin, China, 7–10 August 2016; pp. 966–970. [Google Scholar]
- Xu, Z.; Cai, M.; Li, X.; Hu, T.; Song, Q. Edge-Aided Reliable Data Transmission for Heterogeneous Edge-IoT Sensor Networks. Sensors 2019, 19, 2078. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Sitton-Candanedo, I.; Alonso, R.S.; García, O.; Munoz, L.; Rodríguez-Gonzalez, S. Edge Computing, IoT and Social Computing in Smart Energy Scenarios. Sensors 2019, 19, 3353. [Google Scholar]
- Talaśka, T. Components of Artificial Neural Networks Realized in CMOS Technology to be Used in Intelligent Sensors in Wireless Sensor Networks. Sensors 2018, 18, 4499. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Yan, J.; Zhou, M.; Ding, Z. Recent Advances in Energy-Efficient Routing Protocols for Wireless Sensor Networks: A Review. IEEE Access 2016, 4, 5673–5686. [Google Scholar]
- Srbinovska, M.; Dimcev, V.; Gavrovski, C. Energy consumption estimation of wireless sensor networks in greenhouse crop production. In Proceedings of the IEEE EUROCON 2017—17th International Conference on Smart Technologies, Ohrid, Macedonia, 6–8 July 2017; pp. 870–875. [Google Scholar]
- Mogi, R.; Nakayama, T.; Asaka, T. Load balancing method for IoT sensor system using multi-access edge computing. In Proceedings of the 2018 Sixth International Symposium on Computing and Networking Workshops (CANDARW), Takayama, Japan, 27–30 November 2018; pp. 75–78. [Google Scholar]
- Migos, T.; Christakis, I.; Moutzouris, K.; Stavrakas, I. On the Evaluation of Low-Cost PM Sensors for Air Quality Estimation. In Proceedings of the 2019 8th International Conference on Modern Circuits and Systems Technologies (MOCAST), Thessaloniki, Greece, 13–15 May 2019; pp. 1–4. [Google Scholar]
- Postolache, O.A.; Pereira, J.M.M.; Girao, P.M.B.S. Smart Sensor Network for Air Quality Monitoring Applications. IEEE Trans. Instrum. Meas. 2009, 58, 3253–3262. [Google Scholar]
- Borrego, C.; Costa, A.M.; Ginja, J.; Amorim, M.; Coutinho, M.; Karatzas, K.; Sioumis, T.; Katsifarakis, N.; Konstantinidis, K.; De Vito, S.; et al. Assessment of air quality microsensors versus reference methods: The EuNetAir joint exercise. Atmos. Environ. 2016, 147, 246–263. [Google Scholar] [CrossRef] [Green Version]
- Liu, H.-Y.; Schneider, P.; Haugen, R.; Vogt, M. Performance Assessment of a Low-Cost PM2.5 Sensor for a near Four-Month Period in Oslo, Norway. Atmosphere 2019, 10, 41. [Google Scholar] [CrossRef] [Green Version]
- Karagulian, F.; Barbiere, M.; Kotsev, A.; Spinelle, L.; Gerboles, M.; Lagler, F.; Redon, N.; Crunaire, S.; Borowiak, A. Review of the Performance of Low-Cost Sensors for Air Quality Monitoring. Atmosphere 2019, 10, 506. [Google Scholar]
- Microchip. Wi-Fi Modules and Sensor Networks. Available online: https://www.microchip.com/design-centers/wireless-connectivity/applications/wi-fi-sensors (accessed on 12 February 2020).
- Banach, M.; Kubiak, K.; Długosz, R. Calculation of descriptive statistics by devices with low computational resources for use in calibration of V2I system. In Proceedings of the 2019 24th International Conference on Methods and Models in Automation and Robotics (MMAR), Międzyzdroje, Poland, 24–27 August 2019; pp. 302–307. [Google Scholar]
- West, D.H.D. Updating Mean and Variance Estimates: An Improved Method. Commun. ACM 1979, 22, 532–535. [Google Scholar]
- Długosz, R.; Fischer, G. Low Chip Area, Low Power Dissipation, Programmable, Current Mode, 10-bits, SAR ADC Implemented in the CMOS 130nm Technology. In Proceedings of the 2015 22nd International Conference Mixed Design of Integrated Circuits & Systems (MIXDES), Toruń, Poland, 25–27 June 2015; pp. 348–353. [Google Scholar]
- Długosz, R.; Farine, P.A.; Iniewski, K. Power Efficient Asynchronous Multiplexer for X-Ray Sensors in Medical Imaging Analog Front-End Electronics. Microelectron. J. 2010, 42, 33–42. [Google Scholar] [CrossRef]
- Hosseiny, A.; Jaberipur, G. Decimal Square Root: Algorithm and Hardware Implementation. Circuits Syst. Signal Process. 2016, 35, 4195–4219. [Google Scholar] [CrossRef]
- Liu, C.; Chang, S.; Huang, G.; Lin, Y. A 10-bit 50-MS/s SAR ADC With a Monotonic Capacitor Switching Procedure. IEEE J. Solid-State Circuits 2010, 45, 731–740. [Google Scholar] [CrossRef]
- Chen, H.; Hao, Y.; Zhao, L.; Cheng, Y. An area-efficient 55 nm 10-bit 1-MS/s SAR ADC for battery voltage measurement. J. Semicond. 2013, 34, 9. [Google Scholar] [CrossRef]
- Zeng, Z.; Dong, C.S.; Tan, X. A 10-bit 1 MS/s low power SAR ADC for RSSI application. In Proceedings of the 2010 10th IEEE International Conference on Solid-State and Integrated Circuit Technology, Shanghai, China, 1–4 November 2010; pp. 569–571. [Google Scholar]
- Trakimas, M.; Hancock, T.; Sonkusale, S. A compressed sensing analog-to-information converter with edge-triggered SAR ADC core. IEEE Trans. Circuits Syst. Regul. Pap. 2013, 60, 1135–1148. [Google Scholar] [CrossRef]
- Yan, X.; Fu, L.; Wang, J. An 8-bit 100kS/s Low Power Successive Approximation Register ADC for Biomedical Applications. In Proceedings of the 2013 IEEE 10th International Conference on ASIC, Shenzhen, China, 28–31 October 2013; pp. 1–4. [Google Scholar]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Banach, M.; Długosz, R.; Pauk, J.; Talaśka, T. Hardware Efficient Solutions for Wireless Air Pollution Sensors Dedicated to Dense Urban Areas. Remote Sens. 2020, 12, 776. https://doi.org/10.3390/rs12050776
Banach M, Długosz R, Pauk J, Talaśka T. Hardware Efficient Solutions for Wireless Air Pollution Sensors Dedicated to Dense Urban Areas. Remote Sensing. 2020; 12(5):776. https://doi.org/10.3390/rs12050776
Chicago/Turabian StyleBanach, Marzena, Rafał Długosz, Jolanta Pauk, and Tomasz Talaśka. 2020. "Hardware Efficient Solutions for Wireless Air Pollution Sensors Dedicated to Dense Urban Areas" Remote Sensing 12, no. 5: 776. https://doi.org/10.3390/rs12050776