Land-Use Land-Cover Classification by Machine Learning Classifiers for Satellite Observations—A Review

 ,
,  , ,
, ,  and
and 
Abstract
1. Introduction
2. Materials and Methods
2.1. Study Area
2.2. Materials
2.3. Methods for Land-Use/Land-Cover (LULC) Modelling
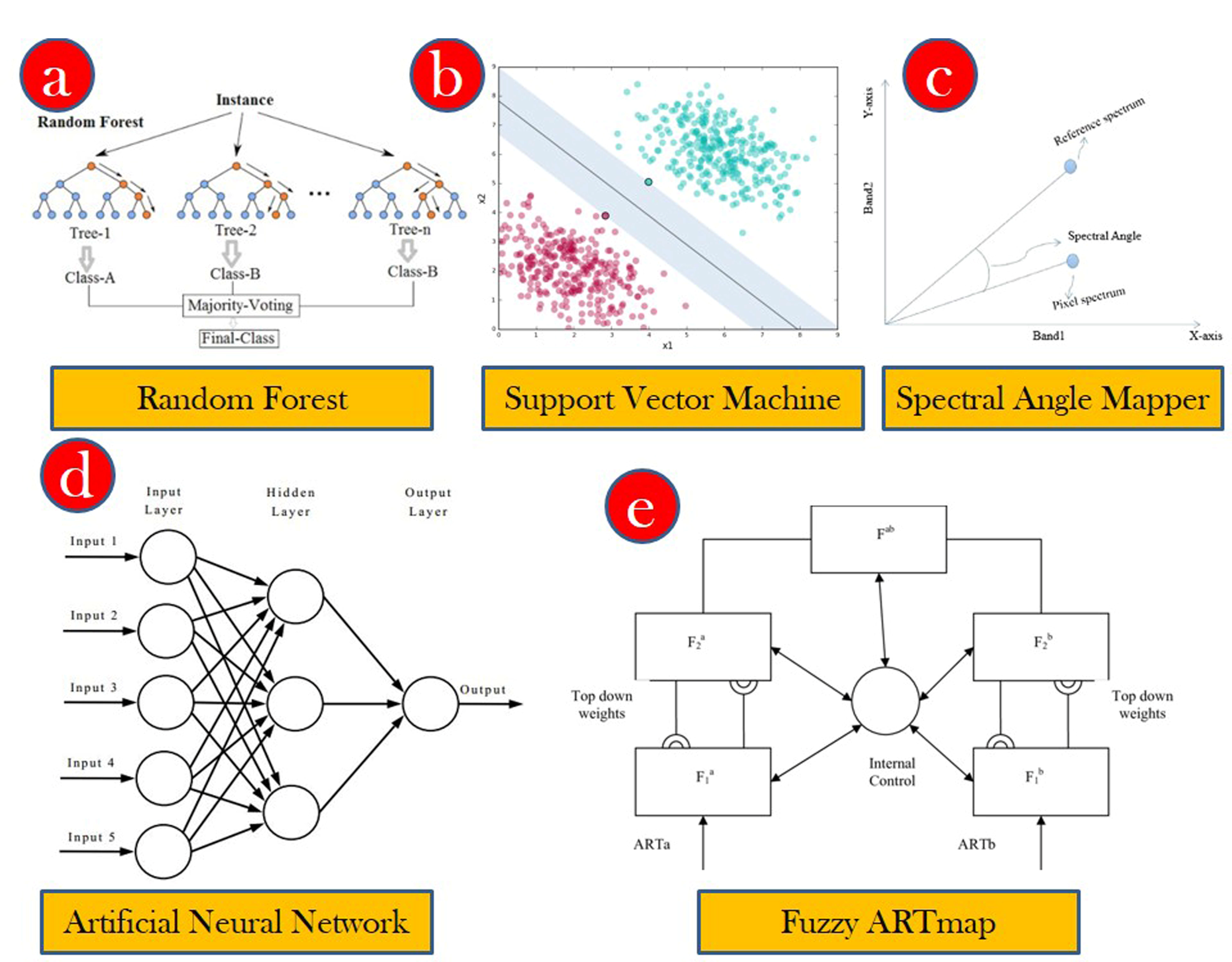
2.3.1. Methods for Machine-Learning Classifiers
2.3.2. Method for Parametric Classifier
2.3.3. Method for Non-Parametric Classifier
2.4. Similarity Test among the Classifiers
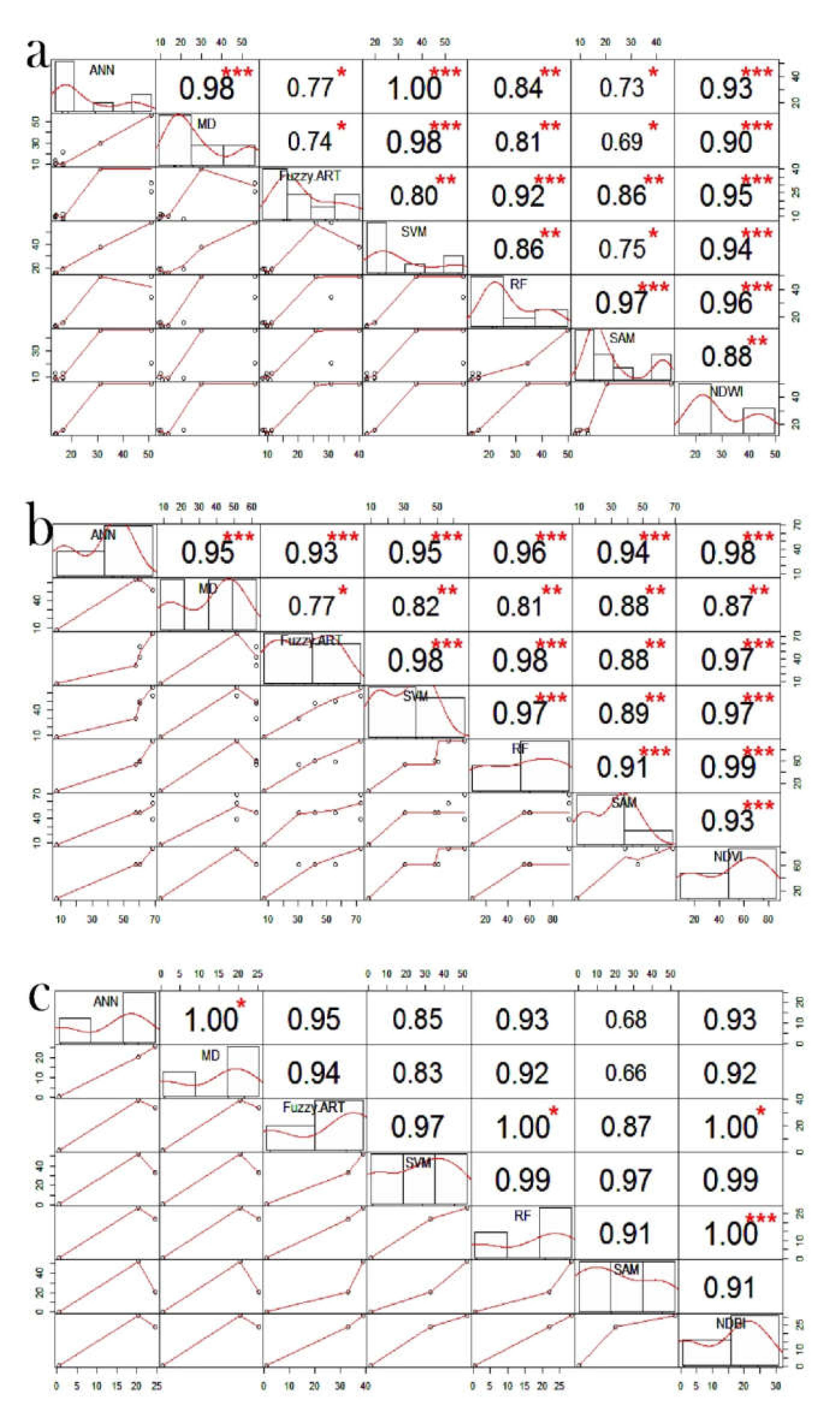
2.5. Accuracy Assessment and Correlation among the Classifiers
3. Results
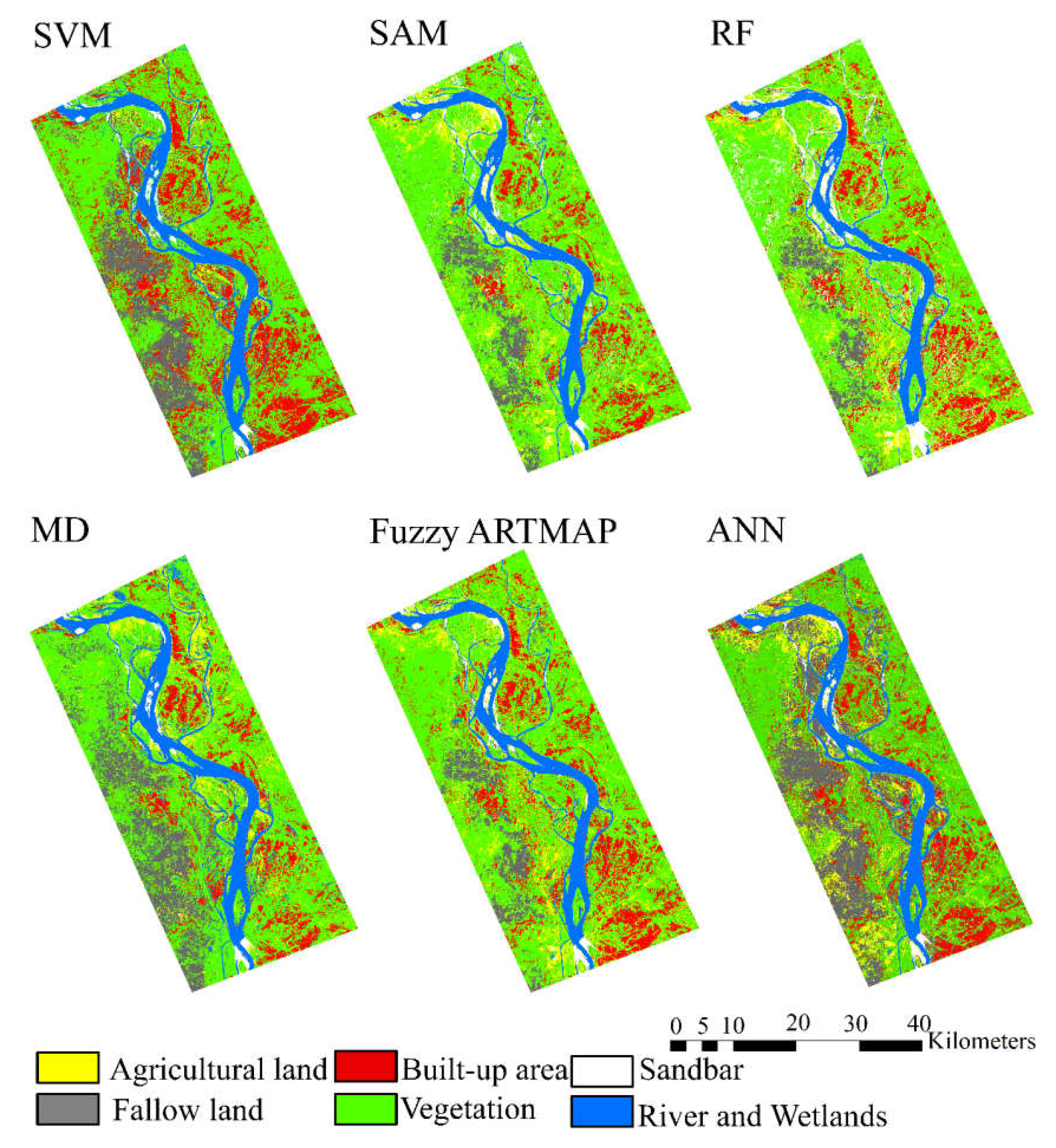
3.1. LULC Classification
3.2. Validation of the LULC Classification
4. Discussion
4.1. Variation in LULC in the Output of Classifiers Used
4.2. Comparison of Accuracy Assessment of Different Classifiers with the Literature
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Conflicts of Interest
References
- Hashem, N.; Balakrishnan, P. Change analysis of land use/land cover and modelling urban growth in Greater Doha, Qatar. Ann. Gis 2015, 21, 233–247. [Google Scholar] [CrossRef]
- Rahman, A.; Kumar, S.; Fazal, S.; Siddiqui, M.A. Assessment of land use/land cover change in the North-West District of Delhi using remote sensing and GIS techniques. J. Indian Soc. Remote Sens. 2012, 40, 689–697. [Google Scholar] [CrossRef]
- Liou, Y.A.; Nguyen, A.K.; Li, M.H. Assessing spatiotemporal eco-environmental vulnerability by Landsat data. Ecol. Indic. 2017, 80, 52–65. [Google Scholar] [CrossRef]
- Nguyen, K.A.; Liou, Y.A. Mapping global eco-environment vulnerability due to human and nature disturbances. MethodsX 2019, 6, 862–875. [Google Scholar] [CrossRef]
- Nguyen, K.A.; Liou, Y.A. Global mapping of eco-environmental vulnerability from human and nature disturbances. Sci. Total Environ. 2019, 664, 995–1004. [Google Scholar] [CrossRef] [PubMed]
- Talukdar, S.; Pal, S. Wetland habitat vulnerability of lower Punarbhaba river basin of the uplifted Barind region of Indo-Bangladesh. Geocarto Int. 2018, 1–30. [Google Scholar] [CrossRef]
- Nguyen, A.K.; Liou, Y.A.; Li, M.H.; Tran, T.A. Zoning eco-environmental vulnerability for environmental management and protection. Ecol. Indic. 2016, 69, 100–117. [Google Scholar] [CrossRef]
- Che, T.; Xiao, L.; Liou, Y.A. Changes in glaciers and glacial lakes and the identification of dangerous glacial lakes in the Pumqu River Basin, Xizang (Tibet). Adv. Meteorol. 2014, 2014, 903709. [Google Scholar] [CrossRef]
- Dao, P.D.; Liou, Y.A. Object-based flood mapping and affected rice field estimation with Landsat 8 OLI and MODIS data. Remote Sens. 2015, 7, 5077–5097. [Google Scholar] [CrossRef]
- Liou, Y.A.; Kar, S.K.; Chang, L. Use of high-resolution FORMOSAT-2 satellite images for post-earthquake disaster assessment: A study following the 12 May 2008 Wenchuan Earthquake. Int. J. Remote Sens. 2010, 31, 3355–3368. [Google Scholar] [CrossRef]
- Liou, Y.A.; Sha, H.C.; Chen, T.M.; Wang, T.S.; Li, Y.T.; Lai, Y.C.; Lu, L.T. Assessment of disaster losses in rice paddy field and yield after Tsunami induced by the 2011 great east Japan earthquake. J. Mar. Sci. Technol. 2012, 20, 618–623. [Google Scholar]
- Zhang, Y.; Ge, T.; Tian, W.; Liou, Y.A. Debris Flow Susceptibility Mapping Using Machine-Learning Techniques in Shigatse Area, China. Remote Sens. 2019, 11, 2801. [Google Scholar] [CrossRef]
- Talukdar, S.; Pal, S. Effects of damming on the hydrological regime of Punarbhaba river basin wetlands. Ecol. Eng. 2019, 135, 61–74. [Google Scholar] [CrossRef]
- Talukdar, S.; Singha, P.; Mahato, S.; Praveen, B.; Rahman, A. Dynamics of ecosystem services (ESs) in response to land use land cover (LU/LC) changes in the lower Gangetic plain of India. Ecol. Indic. 2020, 112, 106121. [Google Scholar]
- Chen, Z.; Wang, L.; Wei, A.; Gao, J.; Lu, Y.; Zhou, J. Land-use change from arable lands to orchards reduced soil erosion and increased nutrient loss in a small catchment. Sci. Total Environ. 2019, 648, 1097–1104. [Google Scholar] [CrossRef] [PubMed]
- Braun, A.; Hochschild, V. A SAR-Based Index for Landscape Changes in African Savannas. Remote Sens. 2017, 9, 359. [Google Scholar] [CrossRef]
- Nguyen, K.A.; Liou, Y.A.; Tran, H.P.; Hoang, P.P.; Nguyen, T.H. Soil salinity assessment by using near-infrared channel and Vegetation Soil Salinity Index derived from Landsat 8 OLI data: A case study in the Tra Vinh Province, Mekong Delta, Vietnam. Prog. Earth Planet. Sci. 2020, 7, 1–16. [Google Scholar] [CrossRef]
- Mas, J.F.; Lemoine-Rodríguez, R.; González-López, R.; López-Sánchez, J.; Piña-Garduño, A.; Herrera-Flores, E. Land use/land cover change detection combining automatic processing and visual interpretation. Eur. J. Remote Sens. 2017, 50, 626–635. [Google Scholar] [CrossRef]
- Reis, S. Analyzing Land Use/Land Cover Changes Using Remote Sensing and GIS in Rize, North-East Turkey. Sensors 2008, 8, 6188–6202. [Google Scholar] [CrossRef]
- Dutta, D.; Rahman, A.; Paul, S.K.; Kundu, A. Changing pattern of urban landscape and its effect on land surface temperature in and around Delhi. Environ. Monit. Assess. 2019, 191, 551. [Google Scholar] [CrossRef]
- Hoan, N.T.; Liou, Y.A.; Nguyen, K.A.; Sharma, R.C.; Tran, D.P.; Liou, C.L.; Cham, D.D. Assessing the Effects of Land-Use Types in Surface Urban Heat Islands for Developing Comfortable Living in Hanoi City. Remote Sens. 2018, 10, 1965. [Google Scholar] [CrossRef]
- Rahman, A.; Aggarwal, S.P.; Netzband, M.; Fazal, S. Monitoring Urban Sprawl Using Remote Sensing and GIS Techniques of a Fast Growing Urban Centre, India. IEEE J. Sel. Top. Appl. Earth Obs. Remote. Sens. 2011, 4, 56–64. [Google Scholar] [CrossRef]
- Kumari, B.; Tayyab, M.; Hang, H.T.; Khan, M.F.; Rahman, A. Assessment of public open spaces (POS) and landscape quality based on per capita POS index in Delhi, India. SN Appl. Sci. 2019, 1, 368. [Google Scholar]
- Pal, S.; Talukdar, S. Assessing the role of hydrological modifications on land use/land cover dynamics in Punarbhaba river basin of Indo-Bangladesh. Environ. Dev. Sustain. 2018, 22, 363–382. [Google Scholar] [CrossRef]
- Cerovski-Darriau, C.; Roering, J.J. Influence of anthropogenic land-use change on hillslope erosion in the Waipaoa River Basin, New Zealand. Earth Surf. Process. Landf. 2016, 41, 2167–2176. [Google Scholar] [CrossRef]
- Pal, S.; Kundu, S.; Mahato, S. Groundwater potential zones for sustainable management plans in a river basin of India and Bangladesh. J. Clean. Prod. 2020, 257, 120311. [Google Scholar] [CrossRef]
- Mahato, S.; Pal, S. Groundwater potential mapping in a rural river basin by union (OR) and intersection (AND) of four multi-criteria decision-making models. Nat. Resour. Res. 2019, 28, 523–545. [Google Scholar] [CrossRef]
- Langat, P.K.; Kumar, L.; Koech, R.; Ghosh, M.K. Monitoring of land use/land-cover dynamics using remote sensing: A case of Tana River Basin, Kenya. Geocarto Int. 2019. [Google Scholar] [CrossRef]
- Hoffmann, J. The future of satellite remote sensing in hydrogeology. Hydrogeol. J. 2005, 13, 247–250. [Google Scholar] [CrossRef]
- Liou, Y.-A.; Wu, A.-M.; Lin, H.-Y. FORMOSAT-2 Quick Imaging. In Optical Payloads for Space Missions; Qian, S.-E., Ed.; Wiley: Oxford, UK, 2016; 1008p, ISBN 9781118945148. [Google Scholar]
- Wentz, E.A.; Nelson, D.; Rahman, A.; Stefanov, W.L.; Roy, S.S. Expert system classification of urban land use/cover for Delhi, India. Int. J. Remote Sens. 2008, 29, 4405–4427. [Google Scholar] [CrossRef]
- Scaioni, M.; Longoni, L.; Melillo, V.; Papini, M. Remote Sensing for Landslide Investigations: An Overview of Recent Achievements and Perspectives. Remote Sens. 2014, 6, 9600–9652. [Google Scholar] [CrossRef]
- Chen, Z.; Wang, J. Land use and land cover change detection using satellite remote sensing techniques in the mountainous Three Gorges Area, China. Int. J. Remote Sens. 2010, 31, 1519–1542. [Google Scholar] [CrossRef]
- Pal, M.; Mather, P.M. Assessment of the effectiveness of support vector machines for hyperspectral data. Future Gener. Comput. Syst. 2004, 20, 1215–1225. [Google Scholar] [CrossRef]
- Wittke, S.; Yu, X.; Karjalainen, M.; Hyyppä, J.; Puttonen, E. Comparison of two dimensional multitemporal Sentinel-2 data with three-dimensional remote sensing data sources for forest inventory parameter estimation over a boreal forest. Int. J. Appl. Earth Obs. Geoinf. 2019, 76, 167–178. [Google Scholar] [CrossRef]
- Viana, C.M.; Girão, I.; Rocha, J. Long-Term Satellite Image Time-Series for Land Use/Land Cover Change Detection Using Refined Open Source Data in a Rural Region. Remote Sens. 2019, 11, 1104. [Google Scholar] [CrossRef]
- Gurjar, S.K.; Tare, V. Estimating long-term LULC changes in an agriculture-dominated basin using CORONA (1970) and LISS IV (2013–14) satellite images: A case study of Ramganga River, India. Environ. Monitor. Assess. 2019, 191, 217. [Google Scholar] [CrossRef] [PubMed]
- Toure, S.I.; Stow, D.A.; Shih, H.C.; Weeks, J.; Lopez-Carr, D. Land cover and land use change analysis using multi-spatial resolution data and object-based image analysis. Remote Sens. Environ. 2018, 210, 259–268. [Google Scholar] [CrossRef]
- Usman, M.; Liedl, R.; Shahid, M.A.; Abbas, A. Land use/land cover classification and its change detection using multi-temporal MODIS NDVI data. J. Geogr. Sci. 2015, 25, 1479–1506. [Google Scholar] [CrossRef]
- Stefanov, W.L.; Netzband, M. Assessment of ASTER Land Cover and MODIS NDVI Data at Multiple Scales for Ecological Characterization of an Arid Urban Center. Remote Sens. Environ. 2005, 99, 31–43. [Google Scholar] [CrossRef]
- Maxwell, A.E.; Warner, T.A.; Fang, F. Implementation of machine-learning classification in remote sensing: An applied review. Int. J. Remote Sens. 2018, 39, 2784–2817. [Google Scholar] [CrossRef]
- Adam, E.; Mutanga, O.; Odindi, J.; Abdel-Rahman, E.M. Land-use/cover classification in a heterogeneous coastal landscape using Rapid Eye imagery: Evaluating the performance of random forest and support vector machines classifiers. Int. J. Remote Sens. 2014, 35, 3440–3458. [Google Scholar] [CrossRef]
- Wu, L.; Zhu, X.; Lawes, R.; Dunkerley, D.; Zhang, H. Comparison of machine learning algorithms for classification of LiDAR points for characterization of canola canopy structure. Int. J. Remote Sens. 2019, 40, 5973–5991. [Google Scholar] [CrossRef]
- Halder, A.; Ghosh, A.; Ghosh, S. Supervised and unsupervised landuse map generation from remotely sensed images using ant based systems. Appl. Soft Comput. 2011, 11, 5770–5781. [Google Scholar] [CrossRef]
- Ma, L.; Liu, Y.; Zhang, X.; Ye, Y.; Yin, G.; Johnson, B.A. Deep learning in remote sensing applications: A meta-analysis and review. ISPRS J. Photogramm. Remote Sens. 2019, 152, 166–177. [Google Scholar] [CrossRef]
- Shih, H.C.; Stow, D.A.; Tsai, Y.H. Guidance on and comparison of machine learning classifiers for Landsat-based land cover and land use mapping. Int. J. Remote Sens. 2019, 40, 1248–1274. [Google Scholar] [CrossRef]
- Camps-Valls, G.; Benediktsson, J.A.; Bruzzone, L.; Chanussot, J. Introduction to the issue on advances in remote sensing image processing. IEEE J. Sel. Top. Signal Process. 2011, 5, 365–369. [Google Scholar] [CrossRef]
- Zhang, C.; Sargent, I.; Pan, X.; Li, H.; Gardiner, A.; Hare, J.; Atkinson, P.M. Joint Deep Learning for land cover and land use classification. Remote Sens. Environ. 2019, 221, 173–187. [Google Scholar] [CrossRef]
- Teluguntla, P.; Thenkabail, P.S.; Oliphant, A.; Xiong, J.; Gumma, M.K.; Congalton, R.G.; Huete, A. A 30-m Landsat-derived cropland extent product of Australia and China using random forest machine learning algorithm on Google Earth Engine cloud computing platform. ISPRS J. Photogramm. Remote Sens. 2018, 144, 325–340. [Google Scholar] [CrossRef]
- Pal, M. Random forest classifier for remote sensing classification. Int. J. Remote Sens. 2005, 26, 217–222. [Google Scholar] [CrossRef]
- Civco, D.L. Artificial neural networks for land-cover classification and mapping. Int. J. Geogr. Inf. Sci. 1993, 7, 173–186. [Google Scholar] [CrossRef]
- Camargo, F.F.; Sano, E.E.; Almeida, C.M.; Mura, J.C.; Almeida, T. A comparative assessment of machine-learning techniques for land use and land cover classification of the Brazilian tropical savanna using ALOS-2/PALSAR-2 polarimetric images. Remote Sens. 2019, 11, 1600. [Google Scholar] [CrossRef]
- Li, X.; Chen, W.; Cheng, X.; Wang, L. A comparison of machine learning algorithms for mapping of complex surface-mined and agricultural landscapes using ZiYuan-3 stereo satellite imagery. Remote Sens. 2016, 8, 514. [Google Scholar] [CrossRef]
- Rogan, J.; Franklin, J.; Stow, D.; Miller, J.; Woodcock, C.; Roberts, D. Mapping land-cover modifications over large areas: A comparison of machine learning algorithms. Remote Sens. Environ. 2008, 112, 2272–2283. [Google Scholar] [CrossRef]
- Jamali, A. Evaluation and comparison of eight machine learning models in land use/land cover mapping using Landsat 8 OLI: A case study of the northern region of Iran. SN Appl. Sci. 2019, 1, 1448. [Google Scholar] [CrossRef]
- Carranza-García, M.; García-Gutiérrez, J.; Riquelme, J.C. A framework for evaluating land use and land cover classification using convolutional neural networks. Remote Sens. 2019, 11, 274. [Google Scholar] [CrossRef]
- Ma, L.; Li, M.; Ma, X.; Cheng, L.; Du, P.; Liu, Y. A review of supervised object-based land-cover image classification. ISPRS J. Photogramm. Remote Sens. 2017, 130, 277–293. [Google Scholar] [CrossRef]
- Mountrakis, G.; Im, J.; Ogole, C. Support vector machines in remote sensing: A review. ISPRS J. Photogramm. Remote Sens. 2011, 66, 247–259. [Google Scholar] [CrossRef]
- Deng, J.S.; Wang, K.; Deng, Y.H.; Qi, G.J. PCA-based land-use change detection and analysis using multitemporal and multisensor satellite data. Int. J. Remote Sens. 2008, 29, 4823–4838. [Google Scholar] [CrossRef]
- Yang, C.; Wu, G.; Ding, K.; Shi, T.; Li, Q.; Wang, J. Improving land use/land cover classification by integrating pixel unmixing and decision tree methods. Remote Sens. 2017, 9, 1222. [Google Scholar] [CrossRef]
- Manandhar, R.; Odeh, I.O.; Ancev, T. Improving the accuracy of land use and land cover classification of Landsat data using post-classification enhancement. Remote Sens. 2009, 1, 330–344. [Google Scholar] [CrossRef]
- Latifovic, R.; Olthof, I. Accuracy assessment using sub-pixel fractional error matrices of global land cover products derived from satellite data. Remote Sens. Environ. 2004, 90, 153–165. [Google Scholar] [CrossRef]
- Pal, S.; Ziaul, S.K. Detection of land use and land cover change and land surface temperature in English Bazar urban centre. Egypt. J. Remote Sens. Space Sci. 2017, 20, 125–145. [Google Scholar] [CrossRef]
- Iqbal, S. Flood and Erosion Induced Population Displacements: A Socio-economic Case Study in the Gangetic Riverine Tract at Malda District, West Bengal, India. J. Human Ecol. 2010, 30, 201–211. [Google Scholar] [CrossRef]
- Atkinson, P.M.; Tatnall, A.R. Introduction neural networks in remote sensing. Int. J. Remote Sens. 1997, 18, 699–709. [Google Scholar] [CrossRef]
- Schuman, C.D.; Birdwell, J.D. Dynamic artificial neural networks with affective systems. PLoS ONE 2013, 8, e80455. [Google Scholar] [CrossRef] [PubMed]
- Liou, Y.-A.; Tzeng, Y.C.; Chen, K.S. A neural network approach to radiometric sensing of land surface parameters. IEEE Trans. Geosci. Remote Sens. 1999, 37, 2718–2724. [Google Scholar] [CrossRef]
- Liou, Y.-A.; Liu, S.-F.; Wang, W.-J. Retrieving soil moisture from simulated brightness temperatures by a neural network. IEEE Trans. Geosci. Remote Sens. 2001, 39, 1662–1673. [Google Scholar]
- Lu, D.; Weng, Q. A survey of image classification methods and techniques for improving classification performance. Int. J. Remote Sens. 2007, 28, 823–870. [Google Scholar] [CrossRef]
- Dixon, B.; Candade, N. Multispectral landuse classification using neural networks and support vector machines: One or the other, or both? Int. J. Remote Sens. 2008, 29, 1185–1206. [Google Scholar] [CrossRef]
- Yilmaz, I.; Kaynar, O. Multiple regression, ANN (RBF, MLP) and ANFIS models for prediction of swell potential of clayey soils. Expert Syst. Appl. 2011, 38, 5958–5966. [Google Scholar] [CrossRef]
- Moody, J.; Darken, C.J. Fast learning in networks of locally-tuned processing units. Neural Comput. 1989, 1, 281–294. [Google Scholar] [CrossRef]
- Shafizadeh-Moghadam, H.; Hagenauer, J.; Farajzadeh, M.; Helbich, M. Performance analysis of radial basis function networks and multi-layer perceptron networks in modelling urban change: A case study. Int. J. Geogr. Inf. Sci. 2015, 29, 606–623. [Google Scholar] [CrossRef]
- Ghassemieh, M.; Nasseri, M. Evaluation of stiffened end-plate moment connection through optimized artificial neural network. J. Softw. Eng. Appl. 2012, 5, 156–167. [Google Scholar] [CrossRef]
- Huang, C.; Davis, L.S.; Townshend, J.R.G. An assessment of support vector machines for land cover classification. Int. J. Remote Sens. 2002, 23, 725–749. [Google Scholar] [CrossRef]
- Bouaziz, M.; Eisold, S.; Guermazi, E. Semiautomatic approach for land cover classification: A remote sensing study for arid climate in Southeastern Tunisia. Euro Mediterr. J. Environ. Integr. 2017, 2, 24. [Google Scholar] [CrossRef]
- Srivastava, P.K.; Han, D.; Rico-Ramirez, M.A.; Bray, M.; Islam, T. Selection of classification techniques for land use/land cover change investigation. Adv. Space Res. 2012, 50, 1250–1265. [Google Scholar] [CrossRef]
- Awad, M.; Khanna, R. Support vector machines for classification. In Efficient Learning Machines; Apress: Berkeley, CA, USA, 2015; pp. 39–66. [Google Scholar]
- Mathur, A.; Foody, G.M. Multiclass and binary SVM classification: Implications for training and classification users. IEEE Geosci. Remote Sens. Lett. 2008, 5, 241–245. [Google Scholar] [CrossRef]
- Mannan, B.; Roy, J.; Ray, A.K. Fuzzy ARTMAP supervised classification of multi-spectral remotely-sensed images. Int. J. Remote Sens. 1998, 19, 767–774. [Google Scholar] [CrossRef]
- Gopal, S. Fuzzy ARTMAP—A neural classifier for multispectral image classification. In Spatial Analysis and GeoComputation; Springer: Berlin/Heidelberg, Germany, 2006; pp. 209–237. [Google Scholar]
- Breiman, L. Random forests. Mach. Learn. 2001, 45, 5–32. [Google Scholar] [CrossRef]
- Abdullah, A.Y.M.; Masrur, A.; Adnan, M.S.G.; Baky, M.; Al, A.; Hassan, Q.K.; Dewan, A. Spatio-temporal patterns of land use/land cover change in the heterogeneous coastal region of Bangladesh between 1990 and 2017. Remote Sens. 2019, 11, 790. [Google Scholar] [CrossRef]
- Liaw, A.; Wiener, M. Classification and Regression by randomForest. R News 2002, 2, 18–22. [Google Scholar]
- Feng, Q.; Gong, J.; Liu, J.; Li, Y. Flood mapping based on multiple endmember spectral mixture analysis and random forest classifier—The case of Yuyao, China. Remote Sens. 2015, 7, 12539–12562. [Google Scholar] [CrossRef]
- Mohan, B.S.S.; Sekhar, C.C. Class-Specific Mahalanobis Distance Metric Learning for Biological Image Classification. In Image Analysis and Recognition—9th International Conference, ICIAR 2012, Aveiro, Portugal, 25–27 June 2012; Campilho, A., Kamel, M., Eds.; Lecture Notes in Computer Science; Springer: Berlin/Heidelberg, Germany, 2012; Volume 7325, pp. 240–248. [Google Scholar]
- Petropoulos, G.P.; Vadrevu, K.P.; Xanthopoulos, G.; Karantounias, G.; Scholze, M. A Comparison of Spectral Angle Mapper and Artificial Neural Network Classifiers Combined with Landsat TM Imagery Analysis for Obtaining Burnt Area Mapping. Sensors 2010, 10, 1967–1985. [Google Scholar] [CrossRef] [PubMed]
- Li, D.; Ke, Y.; Gong, H.; Li, X. Object-Based Urban Tree Species Classification Using Bi-Temporal WorldView-2 and WorldView-3 Images. Remote Sens. 2015, 7, 16917–16937. [Google Scholar] [CrossRef]
- Hurskainen, P.; Adhikari, H.; Siljander, M.; Pellikka, P.K.E.; Hemp, A. Auxiliary datasets improve accuracy of object-based land use/land cover classification in heterogeneous savanna landscapes. Remote Sens. Environ. 2019, 233, 111354. [Google Scholar] [CrossRef]
- Monserud, R.A.; Leemans, R. Comparing global vegetation maps with the Kappa statistic. Ecol. Model. 1992, 62, 275–293. [Google Scholar] [CrossRef]
- Abdi, A.M. Land cover and land use classification performance of machine learning algorithms in a boreal landscape using Sentinel-2 data. GISci. Remote Sens. 2019, 1–20. [Google Scholar] [CrossRef]
- Erbek, F.S.; Özkan, C.; Taberner, M. Comparison of maximum likelihood classification method with supervised artificial neural network algorithms for land use activities. Int. J. Remote Sens. 2004, 25, 1733–1748. [Google Scholar] [CrossRef]
- Noi, P.T.; Kappas, M. Comparison of Random Forest, k-Nearest Neighbor, and Support Vector Machine Classifiers for Land Cover Classification Using Sentinel-2 Imagery. Sensors 2018, 18, 18. [Google Scholar]
- Rodriguez-Galiano, V.F.; Chica-Rivas, M. Evaluation of different machine learning methods for land cover mapping of a Mediterranean area using multi-seasonal Landsat images and Digital Terrain Models. Int. J. Digit. Earth 2014, 7, 492–509. [Google Scholar] [CrossRef]
- Foody, G.M. Harshness in image classification accuracy assessment. Int. J. Remote Sens. 2008, 29, 3137–3158. [Google Scholar] [CrossRef]
- Rwanga, S.S.; Ndambuki, J.M. Accuracy assessment of land use/land cover classification using remote sensing and GIS. Int. J. Geosci. 2017, 8, 611. [Google Scholar] [CrossRef]
- Islam, K.; Jashimuddin, M.; Nath, B.; Nath, T.K. Land use classification and change detection by using multi-temporal remotely sensed imagery: The case of Chunati wildlife sanctuary, Bangladesh. Egypt. J. Remote Sens. Space Sci. 2018, 21, 37–47. [Google Scholar] [CrossRef]
- Leyk, S.; Uhl, J.H.; Balk, D.; Jones, B. Assessing the accuracy of multi-temporal built-up land layers across rural-urban trajectories in the United States. Remote Sens. Environ. 2018, 204, 898–917. [Google Scholar] [CrossRef] [PubMed]
- Carvalho Júnior, O.A.; Guimarães, R.F.; Gillespie, A.R.; Silva, N.C.; Gomes, R.A. A new approach to change vector analysis using distance and similarity measures. Remote Sens. 2011, 3, 2473–2493. [Google Scholar] [CrossRef]
- Qian, Y.; Zhou, W.; Yan, J.; Li, W.; Han, L. Comparing machine learning classifiers for object-based land cover classification using very high-resolution imagery. Remote Sens. 2015, 7, 153–168. [Google Scholar] [CrossRef]
- Szuster, B.W.; Chen, Q.; Borger, M. A comparison of classification techniques to support land cover and land use analysis in tropical coastal zones. Appl. Geogr. 2011, 31, 525–532. [Google Scholar] [CrossRef]
- Ghimire, B.; Rogan, J.; Galiano, V.R.; Panday, P.; Neeti, N. An evaluation of bagging, boosting, and random forests for land-cover classification in Cape Cod, Massachusetts, USA. GIScience Remote Sens. 2012, 49, 623–643. [Google Scholar] [CrossRef]
- Otukei, J.R.; Blaschke, T. Land cover change assessment using decision trees, support vector machines and maximum likelihood classification algorithms. Int. J. Appl. Earth Obs. Geoinf. 2010, 12, S27–S31. [Google Scholar] [CrossRef]
- Shiraishi, T.; Motohka, T.; Thapa, R.B.; Watanabe, M.; Shimada, M. Comparative Assessment of Supervised Classifiers for Land Use–Land Cover Classification in a Tropical Region Using Time-Series PALSAR Mosaic Data. IEEE J. Sel. Top. Appl. Earth Obs. Remote. Sens. 2014, 7, 1186–1199. [Google Scholar] [CrossRef]
- Raczko, E.; Zagajewski, B. Comparison of support vector machine, random forest and neural network classifiers for tree species classification on airborne hyperspectral APEX images. Eur. J. Remote Sens. 2017, 50, 144–154. [Google Scholar] [CrossRef]
- Deilmai, B.R.; Ahmad, B.B.; Zabihi, H. Comparison of two Classification methods (MLC and SVM) to extract land use and land cover in Johor Malaysia.7th IGRSM International Remote Sensing & GIS Conference and Exhibition, 22–23 April 2014, Kuala Lumpur, Malaysia. IOP Conf. Ser. Earth Environ. Sci. 2014, 20, 012052. [Google Scholar]
- Ahmad, M.; Protasov, S.; Khan, A.M.; Hussain, R.; Khattak, A.M.; Khan, W.A. Fuzziness-based active learning framework to enhance hyperspectral image classification performance for discriminative and generative classifiers. PLoS ONE 2018, 13, e0188996. [Google Scholar] [CrossRef]
- Lee, R.Y.; Ou, D.Y.; Shiu, Y.S.; Lei, T.C. Comparisons of using Random Forest and Maximum Likelihood Classifiers with Worldview-2 imagery for classifying Crop Types. In Proceedings of the 36th Asian Conference Remote Sensing Foster ACRS, Quezon City, Philippines, 24–28 October 2015. [Google Scholar]
- Abbas, A.W.; Ahmad, A.; Shah, S.; Saeed, K. Parameter investigation of Artificial Neural Network and Support Vector Machine for image classification. In Proceedings of the 14th International Bhurban Conference on Applied Sciences and Technology (IBCAST), Islamabad, Pakistan, 10–14 January 2017; IEEE: Piscataway, NJ, USA, 2017; pp. 795–798. [Google Scholar]
- Nijhawan, R.; Joshi, D.; Narang, N.; Mittal, A. A Futuristic Deep Learning Framework Approach for Land Use-Land Cover Classification Using Remote Sensing. In Advanced Computing and Communication Technologies: Proceedings of the 11th ICACCT 2018; Springer: Singapore, Singapore, 2018; Volume 702, p. 87. [Google Scholar]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Class Name | Class Description | Class Description Example |
|---|---|---|
| Agricultural land | Area covered by agricultural crops |  |
| Built up area | Area covered by settlement, road |  |
| Sand bar | Land on the river bed |  |
| Fallow land | Area without vegetation |  |
| Vegetation | Area covered by forest, sparse trees, mango orchard |  |
| River and wetlands | Area covered by water |  |
| S. No. | Methods | Software Used for Modelling | Optimized Parameters |
|---|---|---|---|
| 1 | Artificial neural network | TerrSet Geospatial monitoring and modelling system | Hidden layer-1, input layer-1, output layer-1, nodes-6, learning rate-0.01, momentum factor-0.5, sigmoid constant-1 |
| 2 | Support vector machine | Environment for Visualizing Images (ENVI 5.3) | Kernel type-radial basis function, gamma in kernel function-1, penalty parameter-100, pyramid level-1, pyramid reclassification threshold-0.90 |
| 3 | Fuzzy ARTMAP | TerrSet Geospatial monitoring and modelling system | F1 layer neurons-12, F2 layer neurons-385, map field layer neurons-6, choice parameter for ARTa-0.01, learning rate and vigilance parameter for ARTa- 1 and 0.98, learning rate and vigilance parameter for ARTb- 1 and 1, iteration 3338 |
| 4 | Spectral Angle mapper | Environment for Visualizing Images (ENVI 5.3) | Wavelength units-micrometers, Y data multiplier-1, set maximum angle (radiance)- single value, maximum angles (radians)-0.100 |
| 5 | Random Forest | R programming language (R 3.5.3) | - |
| 6 | Mahalanobis Distance | Environment for Visualizing Images (ENVI 5.3) | - |
| Land Use Class | Agriculture Land (%) | Fallow Land (%) | Sand Bar (%) | Settlement (%) | Vegetation (%) | River and Wetlands (%) | Total (%) |
|---|---|---|---|---|---|---|---|
| Artificial neural network (ANN) | 10.88 | 18.29 | 1.3 | 14.03 | 44.07 | 11.43 | 100 |
| Fuzzy adaptive resonance theory-supervised predictive mapping (ARTMAP) | 6.72 | 14.34 | 1.74 | 19.59 | 46.31 | 11.3 | 100 |
| Mahalanobis distance (MD) | 8.25 | 13.65 | 1.2 | 17.66 | 45.48 | 13.75 | 100 |
| Support vector machine (SVM) | 12.27 | 10.4 | 1.5 | 17.95 | 48.31 | 9.57 | 100 |
| Random forest (RF) | 18.2 | 5.37 | 0.94 | 12.68 | 53.92 | 8.89 | 100 |
| Spectral angle mapper (SAM) | 12.54 | 6.16 | 1.84 | 9.99 | 58.62 | 10.86 | 100 |
| Average (%) | 11.47 | 11.36 | 1.42 | 15.32 | 49.45 | 10.96 | |
| Standard deviation (SD) | 4.01 | 5.02 | 0.34 | 3.67 | 5.65 | 1.69 | |
| Coefficient of variation (CV) (%) | 34.93 | 44.15 | 23.95 | 24.02 | 11.43 | 15.44 |
| Land Use Class | ANN | Fuzzy ARTMAP | MD | SVM | RF | SAM |
|---|---|---|---|---|---|---|
| Artificial neural network (ANN) | 1 | 1.61 i, 1.28 ii, 0.72 iii, 0.95 iv, 1.01 v, 1.11 vi | 1.31 i, 1.34 ii, 0.79 iii, 0.97 iv, 0.83 v, 1.05 vi | 0.88 i, 1.75 ii, 0.78 iii, 0.91 iv, 1.19 v, 1.10 vi | 0.59 i, 3.04 ii, 1.11 iii, 0.82 iv, 1.29 v, 1.37 vi | 0.86 i, 2.97 ii, 1.40 iii, 0.75 iv, 1.05 v, 1.41 vi |
| Fuzzy adaptive resonance theory-supervised predictive mapping (ARTMAP) | 1 | 0.81 i, 1.05 ii, 1.11 iii, 1.02 iv, 0.83 v, 0.96 vi | 0.54 i, 1.38 ii, 1.09 iii, 0.96 iv, 1.18 v, 1.03 vi | 0.34 i, 2.67 ii, 1.54 iii, 0.86 iv, 1.27 v, 1.34 vi | 0.5 i, 2.33 ii, 1.96 iii, 0.79 iv, 1.04 v, 1.32 vi | |
| Mahalanobis distance (MD) | 1 | 0.67 i, 1.31 ii, 0.98 iii, 0.94 iv, 1.44 v, 1.07 vi | 0.45 i, 2.54 ii, 1.39 iii, 0.84 iv, 1.55 v, 1.35 vi | 0.66 i, 2.21 ii, 1.77 iii, 0.78 iv, 1.27 v, 1.34 vi | ||
| Support vector machine (SVM) | 1 | 0.67 i, 1.94 ii, 1.42 iii, 0.9 iv, 1.08 v, 1.2 vi | 0.98 i, 1.69 ii, 1.8 iii, 0.82 iv, 0.88 v, 1.23 vi | |||
| Random forest (RF) | 1 | 1.45 i, 0.87 ii, 1.27 iii, 0.92 iv, 0.82 v, 1.07 vi | ||||
| Spectral angle mapper (SAM) | 1 |
| Methods | Kappa Coefficient (K) | Area Under Curve (AUC) | Root Mean Square Error (RMSE) |
|---|---|---|---|
| ANN | 0.87 | 0.89 | 0.09 |
| MD | 0.82 | 0.83 | 0.28 |
| Fuzzy ARTMAP | 0.85 | 0.86 | 0.17 |
| SVM | 0.86 | 0.87 | 0.11 |
| RF | 0.89 | 0.91 | 0.006 |
| SAM | 0.84 | 0.85 | 0.23 |
| LULC | Area (Sq. Km) Computed by Algorithms and Spectral Indices | |||||||
|---|---|---|---|---|---|---|---|---|
| ANN | MD | Fuzzy ART | SVM | RF | SAM | Spectral Indices | ||
| Vegetation and Agricultural Land | Window 1 | 57.52 (3.72) | 62.75 (−1.51) | 55.83 (5.41) | 50.47 (10.77) | 54.07 (7.17) | 46.87 (14.37) | 61.24 |
| Window 2 | 71.57 (14.98) | 51.66 (34.89) | 73 (13.55) | 66.69 (19.79) | 94.5 (−7.95) | 68.44 (18.11) | 86.55 | |
| Window 3 | 7.26 (0.81) | 7.96 (0.11) | 7.15 (0.92) | 8.25 (−0.18) | 7.98 (0.09) | 7.95 (0.12) | 8.07 | |
| Total | 136.35 (19.52) | 122.37 (33.5) | 135.98 (19.89) | 125.41 (30.46) | 156.55 (−0.68) | 123.26 (32.61) | 155.87 | |
| Water Body | Window 1 | 16.65 (−0.46) | 21.26 (−5.07) | 11.36 (4.83) | 19.7 (−3.51) | 15.9 (0.29) | 12.96 (3.23) | 16.19 |
| Window 2 | 50.94 (−1.06) | 56.34 (−6.46) | 50.9 (−1.02) | 57.67 (−7.79) | 49.41 (0.47) | 45.6 (4.28) | 49.88 | |
| Window 3 | 13.78 (−0.28) | 13.68 (−0.18) | 13.72 (0.22) | 16.35 (−2.85) | 13.48 (0.02) | 13.04 (0.46) | 13.5 | |
| Total | 81.37 (−1.8) | 91.28 (−11.71) | 75.98 (3.59) | 93.72 (−14.15) | 78.79 (0.78) | 71.6 (7.97) | 79.57 | |
| Built−up Area | Window 1 | 24.66 (−0.63) | 25.35 (−1.32) | 33.12 (−9.09) | 32.56 (−8.53) | 21.98 (2.05) | 20.4 (3.63) | 24.03 |
| Window 2 | 24.46 (6.54) | 20.35 (10.65) | 38.9 (−7.9) | 52.1 (−21.1) | 28.36 (2.64) | 52.1 (−21.1) | 31 | |
| Window 3 | 0.55 (0.06) | 0.55 (0.06) | 1.19 (−0.58) | 1.29 (−0.68) | 0.51 (0.1) | 0.37 (0.24) | 0.61 | |
| Total | 49.67 (5.97) | 46.25 (9.39) | 73.21 (−17.57) | 85.95 (−30.31) | 50.85 (4.79) | 72.87 (−17.23) | 55.64 | |
| S. No. | Methods Used for LULC Classification | Best Method | Study area | Authors |
|---|---|---|---|---|
| 1 | Random forest (RF), K-nearest neighbor (KNN), Support vector machine (SVM) | SVM | Red river delta, Vietnam | [93] |
| 2 | RF, SVM | RF | Eastern suburbs of Deyang city, Chaina | [57] |
| 3 | naïve Bayes (NB), Decision trees J-48, RF, Multilayer perception, SVM | SVM | Brazialian Tropical Savana | [52] |
| 4 | SVM, NB, Decision trees (DT), KNN | SVM | Haidian District of Beijing, Chaina | [100] |
| 5 | Maximum likelihood classifier (MLC), SVM, Artificial neural network (ANN) | ANN | Walnutcreek, Lowa, USA | [77] |
| 6 | SVM, ANN, Classification and regression tree (CART) | SVM | Albemarle-Pamlico Estuary System, | [63] |
| 7 | Bagging, Boosting, RF, Classification tree | Boosting and RF | Cape cod, Massachusetts, USA | [102] |
| 8 | MLC, ANN, SVM | SVM | Koh Tao, western Gulf of Thailand | [101] |
| 9 | RF, SVM | RF | Eastern Coast of KwaZulu-Natal, South Africa | [42] |
| 10 | DT, RF, ANN, SVM | RF | Granada, Spain | [93] |
| 11 | MLC, SVM, DT | DT | Kibale Sub-county, Eastern Uganda | [103] |
| 12 | NB, AdaBoost, ANN, RF, SVM | RF | Riau, Jambi and West Sumatra, Indonesia | [104] |
| 13 | SVM, RF, ANN | ANN | North Western part of Karkonosze National Park, Poland | [105] |
| 14 | MLC, SVM | SVM | Johor, Malaysia | [106] |
| 15 | SVM, MLC, ANN | SVM | Klang District, Malaysia | [107] |
| 17 | RF, MLC | MLC | Sihu Township of Yun-Ling, Taiwan | [108] |
| 18 | ANN, SVM | ANN | Abbottabad, Pakistan | [109] |
| 19 | ANN, SVM, Rotation Forest, RF, Meta Classifier | RF and Meta Classifier | Gomukh, Uttarakhand, India | [110] |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Talukdar, S.; Singha, P.; Mahato, S.; Shahfahad; Pal, S.; Liou, Y.-A.; Rahman, A. Land-Use Land-Cover Classification by Machine Learning Classifiers for Satellite Observations—A Review. Remote Sens. 2020, 12, 1135. https://doi.org/10.3390/rs12071135
Talukdar S, Singha P, Mahato S, Shahfahad, Pal S, Liou Y-A, Rahman A. Land-Use Land-Cover Classification by Machine Learning Classifiers for Satellite Observations—A Review. Remote Sensing. 2020; 12(7):1135. https://doi.org/10.3390/rs12071135
Chicago/Turabian StyleTalukdar, Swapan, Pankaj Singha, Susanta Mahato, Shahfahad, Swades Pal, Yuei-An Liou, and Atiqur Rahman. 2020. "Land-Use Land-Cover Classification by Machine Learning Classifiers for Satellite Observations—A Review" Remote Sensing 12, no. 7: 1135. https://doi.org/10.3390/rs12071135
APA StyleTalukdar, S., Singha, P., Mahato, S., Shahfahad, Pal, S., Liou, Y.-A., & Rahman, A. (2020). Land-Use Land-Cover Classification by Machine Learning Classifiers for Satellite Observations—A Review. Remote Sensing, 12(7), 1135. https://doi.org/10.3390/rs12071135