Assessment and Comparison of Broadcast Ionospheric Models: NTCM-BC, BDGIM, and Klobuchar



Abstract
:
1. Introduction
2. Ionospheric Models
2.1. Klobuchar Model
2.2. BDGIM
2.3. NTCM-BC
3. Processing Strategies
3.1. Data Selection
3.2. STEC Calibration
3.3. Coefficients Computation and Selection
3.4. Evaluation Metrics
4. Results
4.1. Comparison with GPS STEC
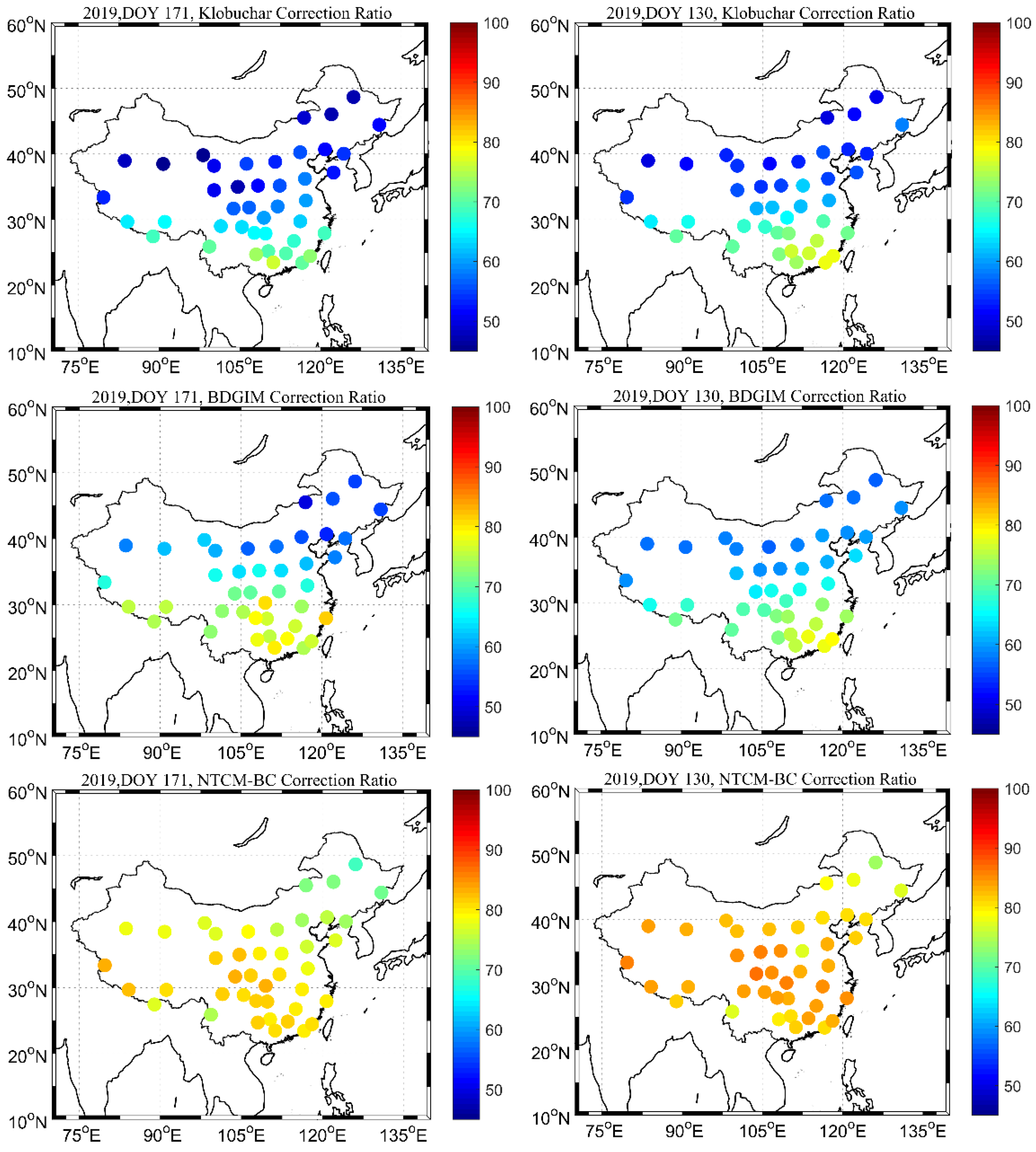
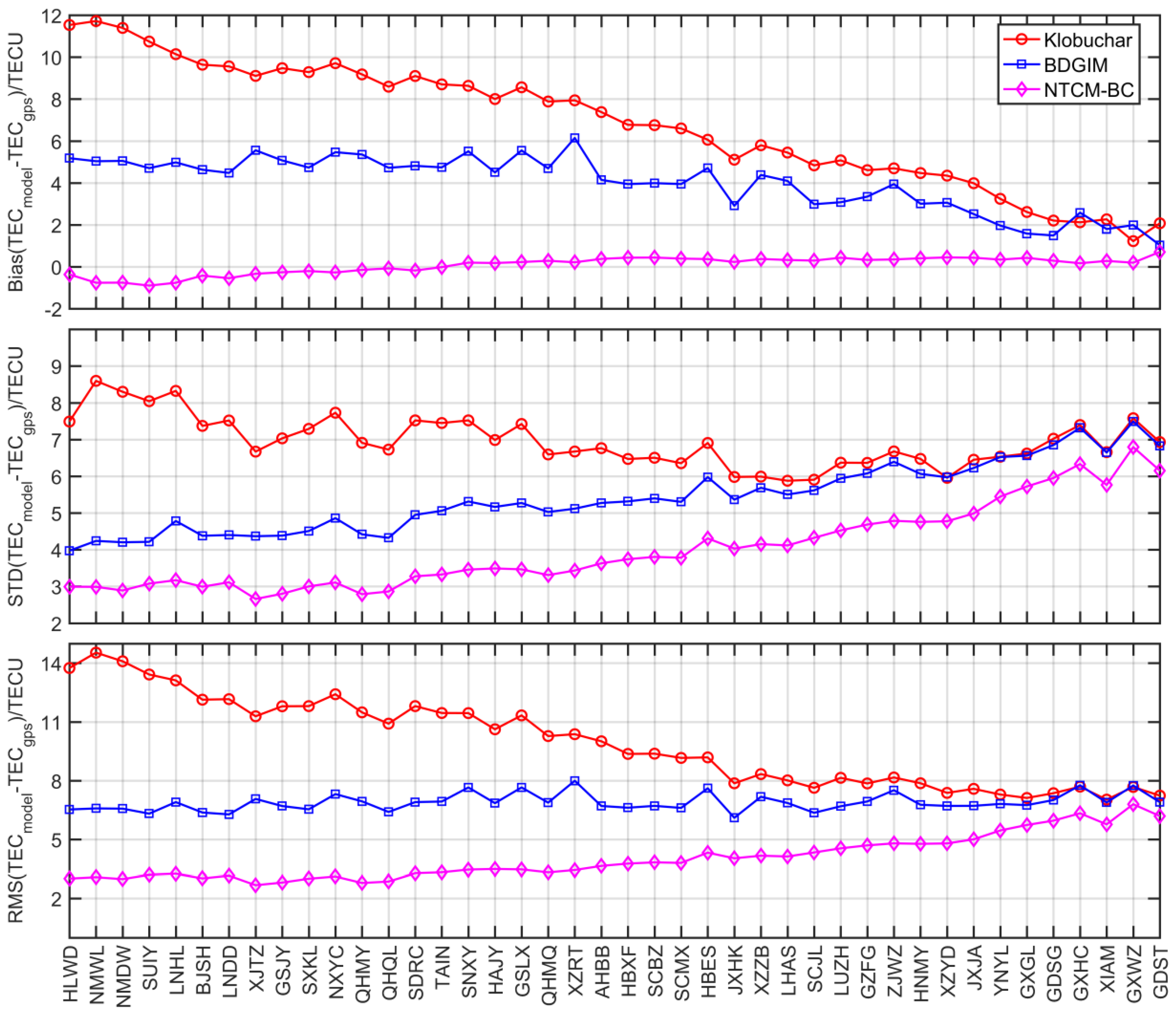
4.1.1. Regional Comparison
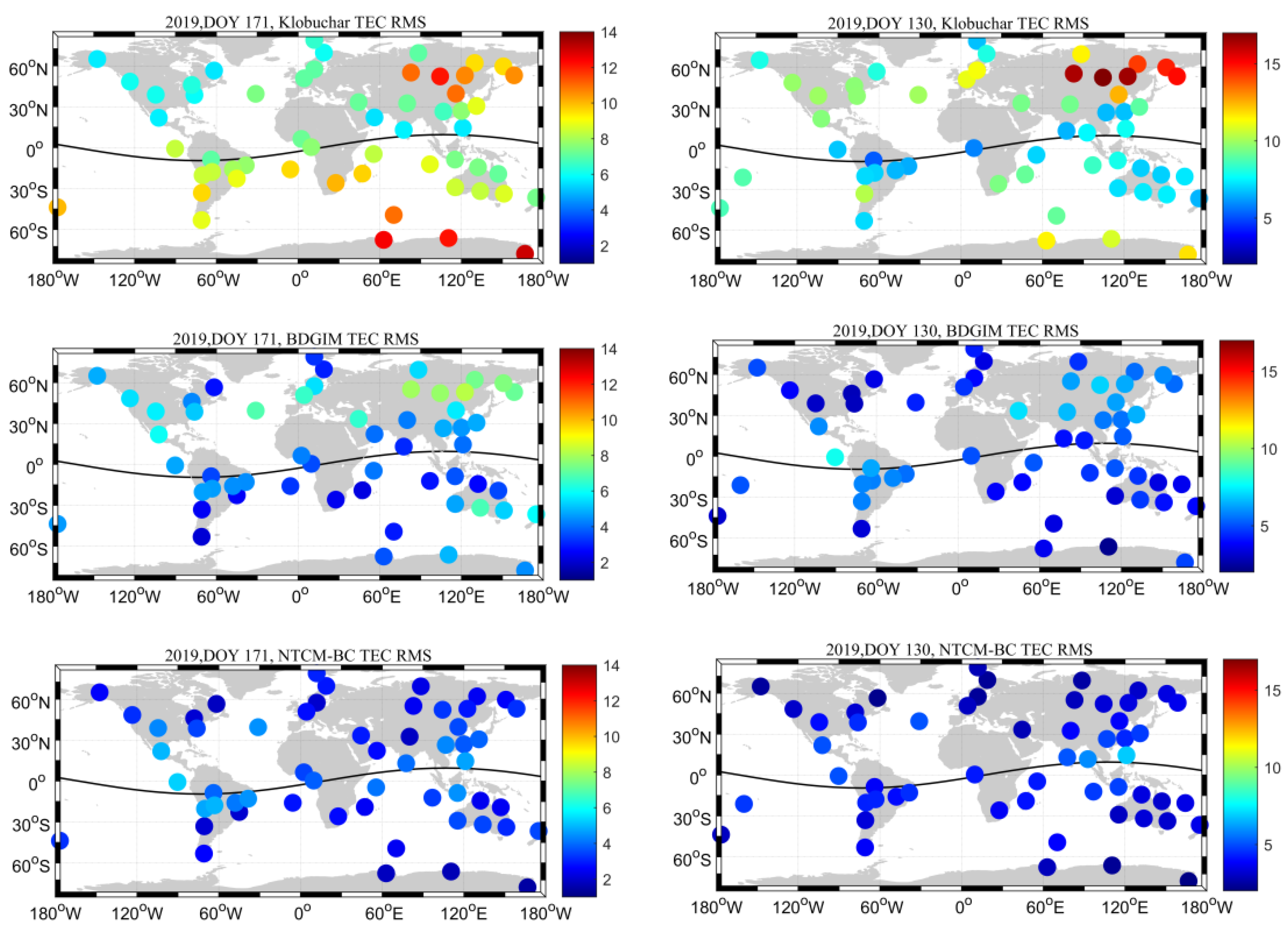
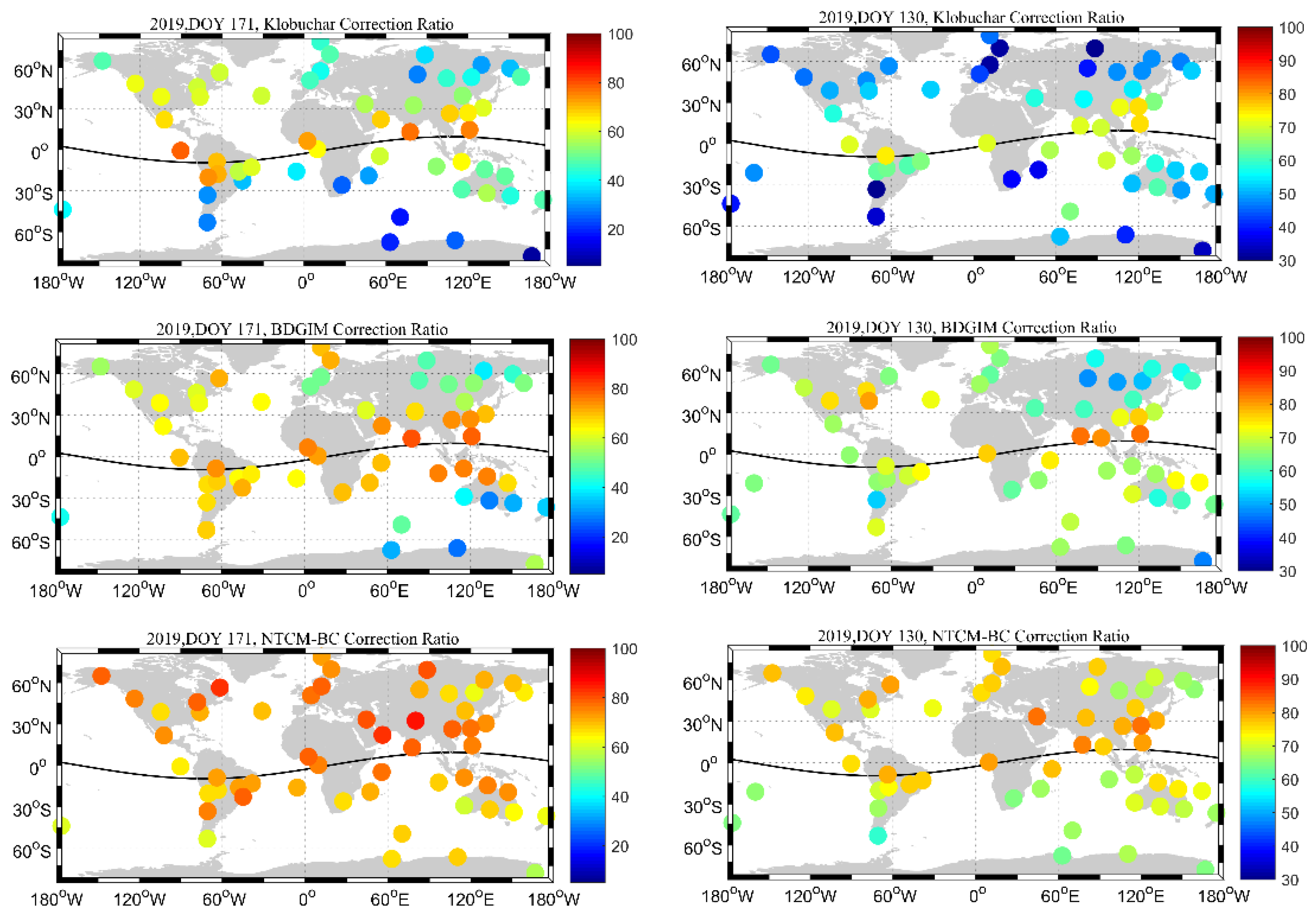
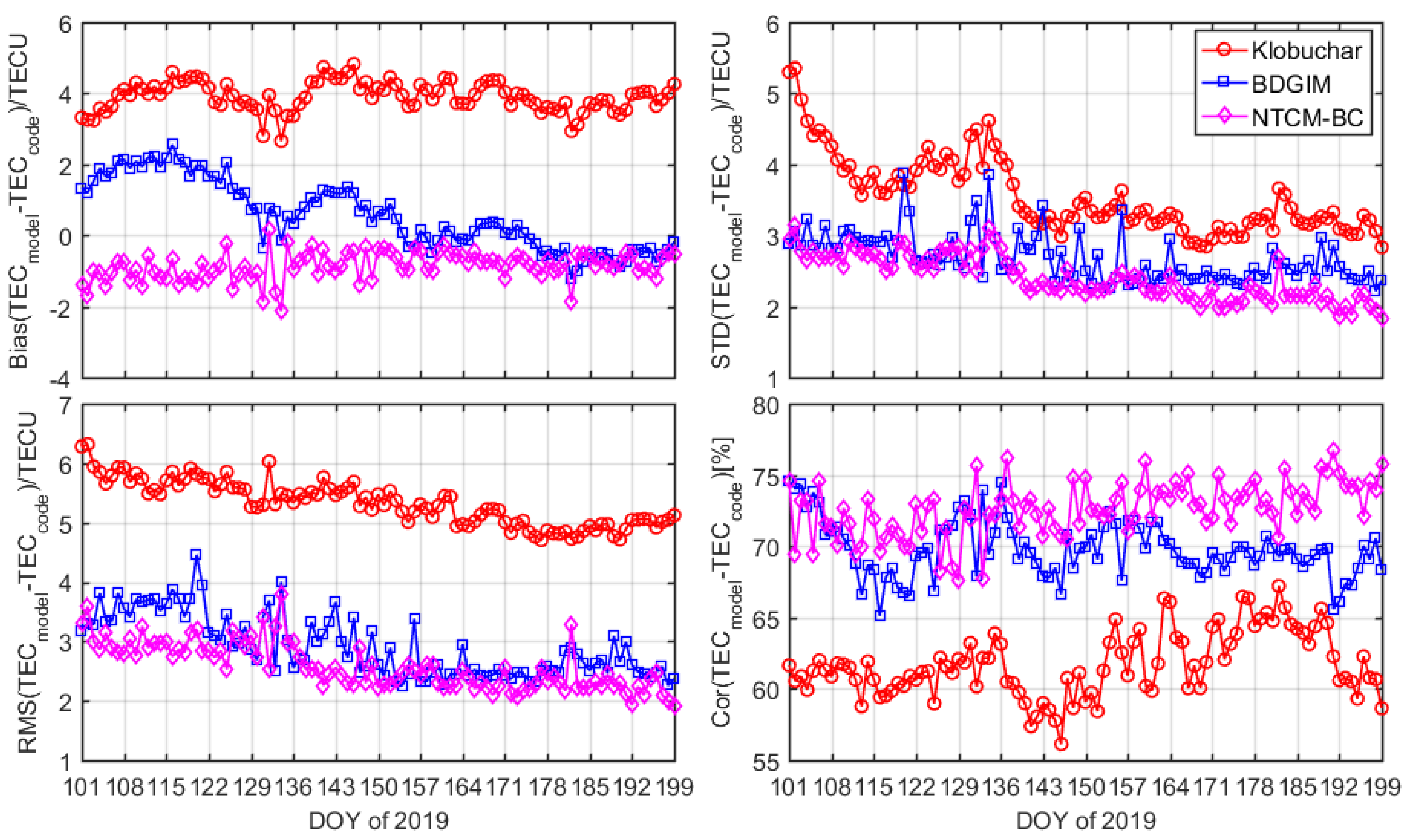
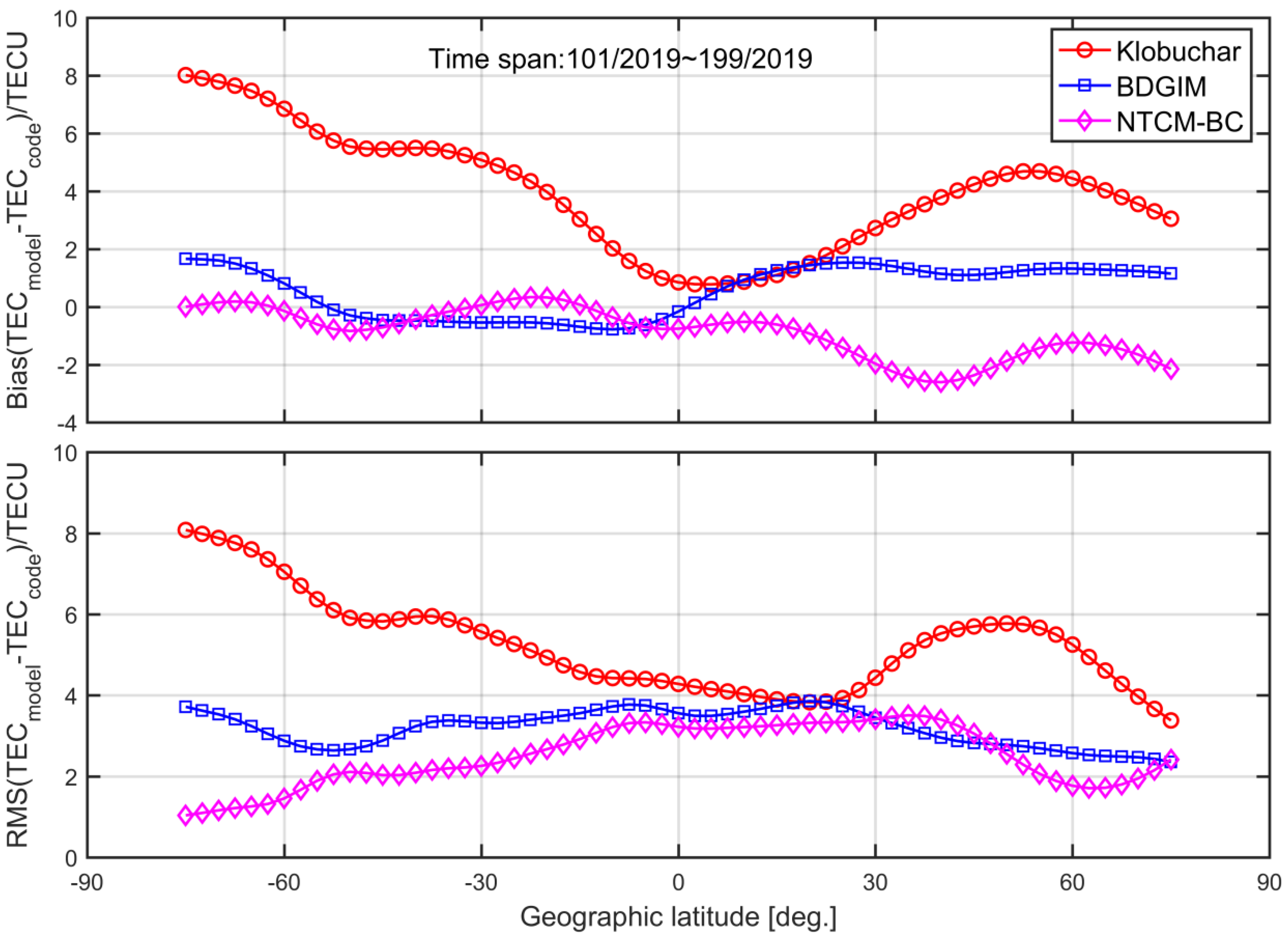
4.1.2. Global Comparison
4.2. Comparison with CODE VTEC
5. Conclusions and Discussion
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Hoque, M.M.; Jakowski, N. An alternative ionospheric correction model for global navigation satellite systems. J. Geod. 2015, 89, 391–406. [Google Scholar] [CrossRef]
- Klobuchar, J.A. Ionospheric time-delay algorithm for single-frequency GPS users. IEEE Trans. Aerosp. Electron. Syst. 1987, AES-23, 325–331. [Google Scholar]
- Hochegger, G.; Nava, B.; Radicella, S.; Leitinger, R. A family of ionospheric models for different uses. Phys. Chem. Earth Part C Sol. Terr. Planet. Sci. 2000, 25, 307–310. [Google Scholar]
- Nava, B.; Coisson, P.; Radicella, S.M. A new version of the NeQuick ionosphere electron density model. J. Atmos. Sol.-Terr. Phys. 2008, 70, 1856–1862. [Google Scholar] [CrossRef]
- Radicella, S.M.; Leitinger, R. The evolution of the DGR approach to model electron density profiles. Adv. Space Res. 2001, 27, 35–40. [Google Scholar] [CrossRef]
- China Satellite Navigation Office. BeiDou Navigation Satellite System Signal in Space Interface Control Document Open Service Signal B1C (Version1.0). Available online: http://www.beidou.gov.cn/xt/gfxz/201712/P020171226741342013031.pdf (accessed on 27 December 2017).
- Jakowski, N.; Hoque, M.M.; Mayer, C. A new global TEC model for estimating transionospheric radio wave propagation errors. J. Geod. 2011, 85, 965–974. [Google Scholar] [CrossRef]
- Jakowski, N. TEC monitoring by using satellite positioning systems; Modern Ionospheric Science: Berlin, Germany, 1996; pp. 371–390. [Google Scholar]
- Hoque, M.M.; Jakowski, N.; Berdermann, J. An ionosphere broadcast model for next generation GNSS. In Proceedings of the 28th International Technical Meeting of the Satellite Division of the Institute of Navigation (ION GNSS+ 2015), Tampa, FL, USA, 14–18 September 2015; pp. 3755–3765. [Google Scholar]
- Bidaine, B. Ionosphere modelling for Galileo single frequency Users Doctoral dissertation. Ph.D. Thesis, Université de Liège, Liège, Belgique, 2012. [Google Scholar]
- Zhang, X.H.; Ma, F.J.; Ren, X.D.; Xie, W.L.; Zhu, F.; Li, X. Evaluation of NTCM-BC and a proposed modification for single-frequency positioning. GPS Solut. 2017, 21, 1535–1548. [Google Scholar]
- Wu, X.L.; Hu, X.G.; Wang, G.; Zhong, H.J.; Tang, C.P. Evaluation of COMPASS ionospheric model in GNSS positioning. Adv. Space Res. 2013, 51, 959–968. [Google Scholar] [CrossRef]
- Yuan, Y.; Wang, N.; Li, Z.; Huo, X. The beidou global broadcast ionospheric delay correction model (bdgim) and its preliminary performance evaluation results. J. Znstitute Navig. 2019, 66, 55–69. [Google Scholar]
- Schaer, S. Mapping and predicting the Earth’s ionosphere using the Global Positioning System. Ph.D. Thesis, AIUB, University of Berne, Bern, Switzerland, 1999. [Google Scholar]
- Ren, X.; Zhang, X.; Xie, W.; Zhang, K.; Yuan, Y.; Li, X. Global ionospheric modelling using multi-GNSS: BeiDou, Galileo, GLONASS and GPS. Sci. Rep. 2016, 6, 33499. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Seber, G.A.F.; Wild, C.J. Unconstrained optimization. In Nonlinear Regression; Wiley: Hoboken, NJ, USA, 1989. [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Period | Klobuchar | BDGIM | NTCM-BC | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Bias | STD | RMS | Cor | Bias | STD | RMS | Cor | Bias | STD | RMS | Cor | |
| April | 7.66 | 7.81 | 11.15 | 58.5 | 6.14 | 5.52 | 8.32 | 58.1 | 0.07 | 4.04 | 4.08 | 80.5 |
| May | 6.97 | 7.56 | 10.55 | 59.4 | 4.42 | 5.98 | 7.59 | 61.6 | 0.05 | 4.61 | 4.63 | 77.4 |
| June | 6.31 | 5.77 | 8.70 | 57.4 | 2.49 | 4.08 | 5.13 | 68.1 | 0.11 | 3.37 | 3.39 | 79.8 |
| July | 5.63 | 4.76 | 7.58 | 55.6 | 1.63 | 3.61 | 4.34 | 71.6 | 0.04 | 3.30 | 3.31 | 79.7 |
| Period | Klobuchar | BDGIM | NTCM-BC | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Bias | STD | RMS | Cor | Bias | STD | RMS | Cor | Bias | STD | RMS | Cor | |
| April | 7.57 | 5.62 | 10.00 | 51.2 | 3.93 | 4.68 | 6.33 | 63.3 | 0.02 | 3.70 | 4.16 | 71.9 |
| May | 7.18 | 5.25 | 9.36 | 52.1 | 2.20 | 5.03 | 5.94 | 64.8 | 0.13 | 3.62 | 3.96 | 71.8 |
| June | 6.98 | 4.17 | 8.31 | 50.7 | 0.82 | 3.69 | 4.76 | 62.5 | 0.25 | 2.95 | 3.24 | 73.1 |
| July | 6.79 | 3.87 | 8.04 | 50.4 | 0.17 | 3.49 | 4.64 | 61.1 | 0.33 | 2.86 | 3.06 | 73.1 |
| Models | GPS STEC | CODE VTEC | ||||||
|---|---|---|---|---|---|---|---|---|
| Bias | STD | RMS | Cor | Bias | STD | RMS | Cor | |
| Klobuchar | 6.98 | 4.93 | 8.92 | 52.9 | 3.91 | 3.55 | 5.33 | 61.7 |
| BDGIM | 1.69 | 4.64 | 5.48 | 64.1 | 0.57 | 2.68 | 2.92 | 69.8 |
| NTCM-BC | 0.20 | 3.37 | 3.67 | 72.7 | -0.87 | 2.40 | 2.58 | 72.6 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, C.; Guo, J.; Geng, T.; Zhao, Q.; Jiang, K.; Xie, X.; Lv, Y. Assessment and Comparison of Broadcast Ionospheric Models: NTCM-BC, BDGIM, and Klobuchar. Remote Sens. 2020, 12, 1215. https://doi.org/10.3390/rs12071215
Yang C, Guo J, Geng T, Zhao Q, Jiang K, Xie X, Lv Y. Assessment and Comparison of Broadcast Ionospheric Models: NTCM-BC, BDGIM, and Klobuchar. Remote Sensing. 2020; 12(7):1215. https://doi.org/10.3390/rs12071215
Chicago/Turabian StyleYang, Chao, Jing Guo, Tao Geng, Qile Zhao, Kecai Jiang, Xin Xie, and Yifei Lv. 2020. "Assessment and Comparison of Broadcast Ionospheric Models: NTCM-BC, BDGIM, and Klobuchar" Remote Sensing 12, no. 7: 1215. https://doi.org/10.3390/rs12071215
APA StyleYang, C., Guo, J., Geng, T., Zhao, Q., Jiang, K., Xie, X., & Lv, Y. (2020). Assessment and Comparison of Broadcast Ionospheric Models: NTCM-BC, BDGIM, and Klobuchar. Remote Sensing, 12(7), 1215. https://doi.org/10.3390/rs12071215