Change Detection in Aerial Images Using Three-Dimensional Feature Maps


Abstract
:
1. Introduction
2. Proposed Methodology
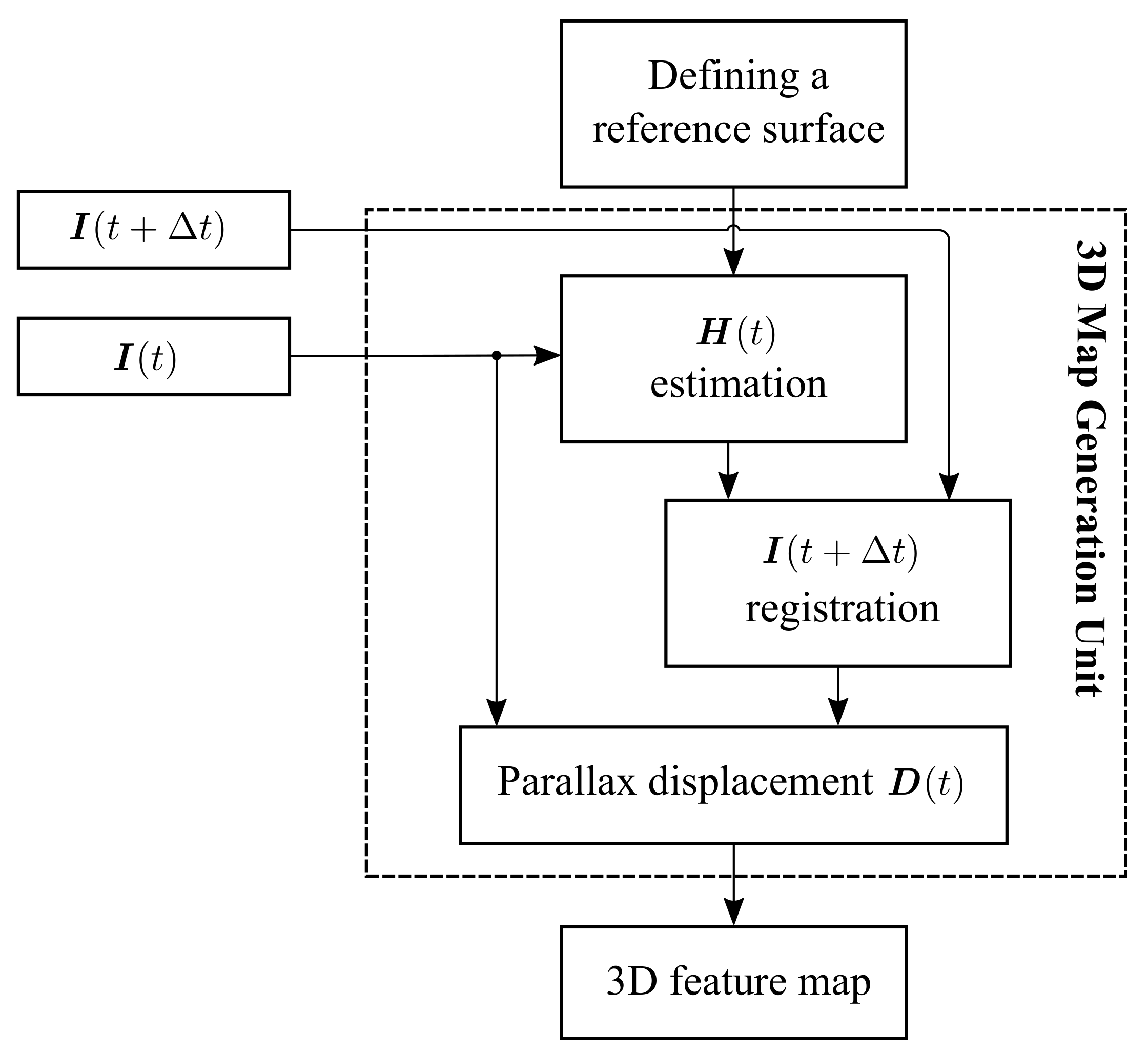
2.1. 3D Map Generation Unit
2.1.1. Image Registration
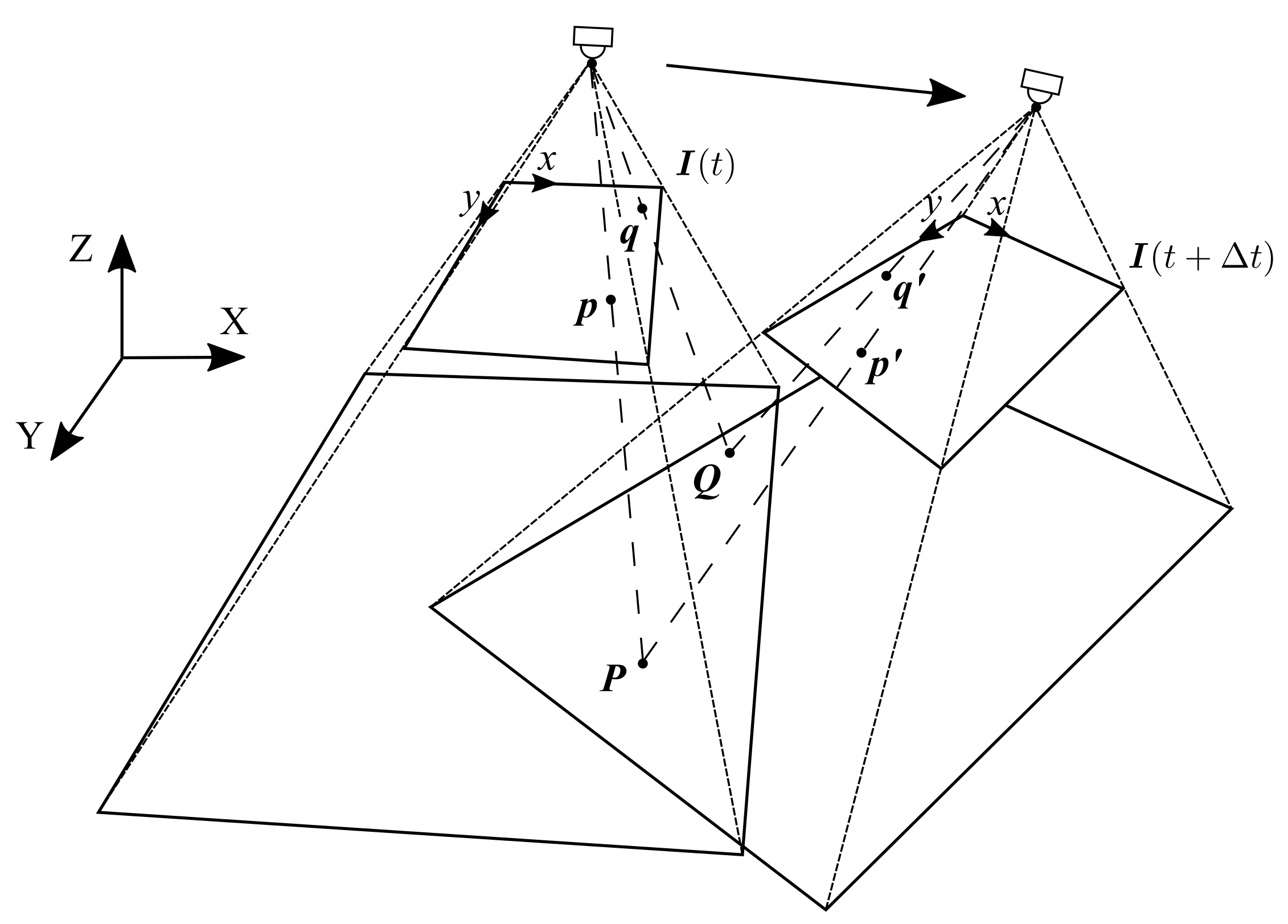
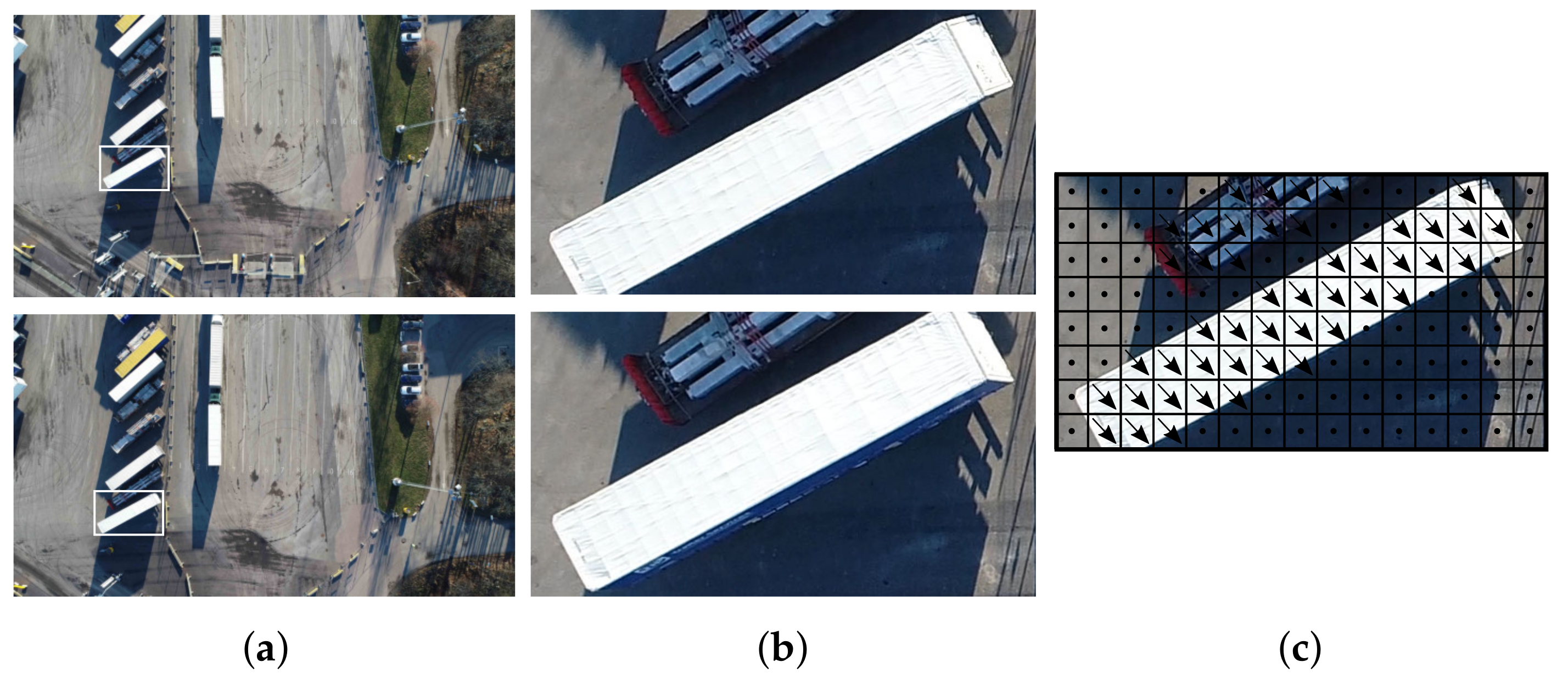
2.1.2. Parallax Displacement
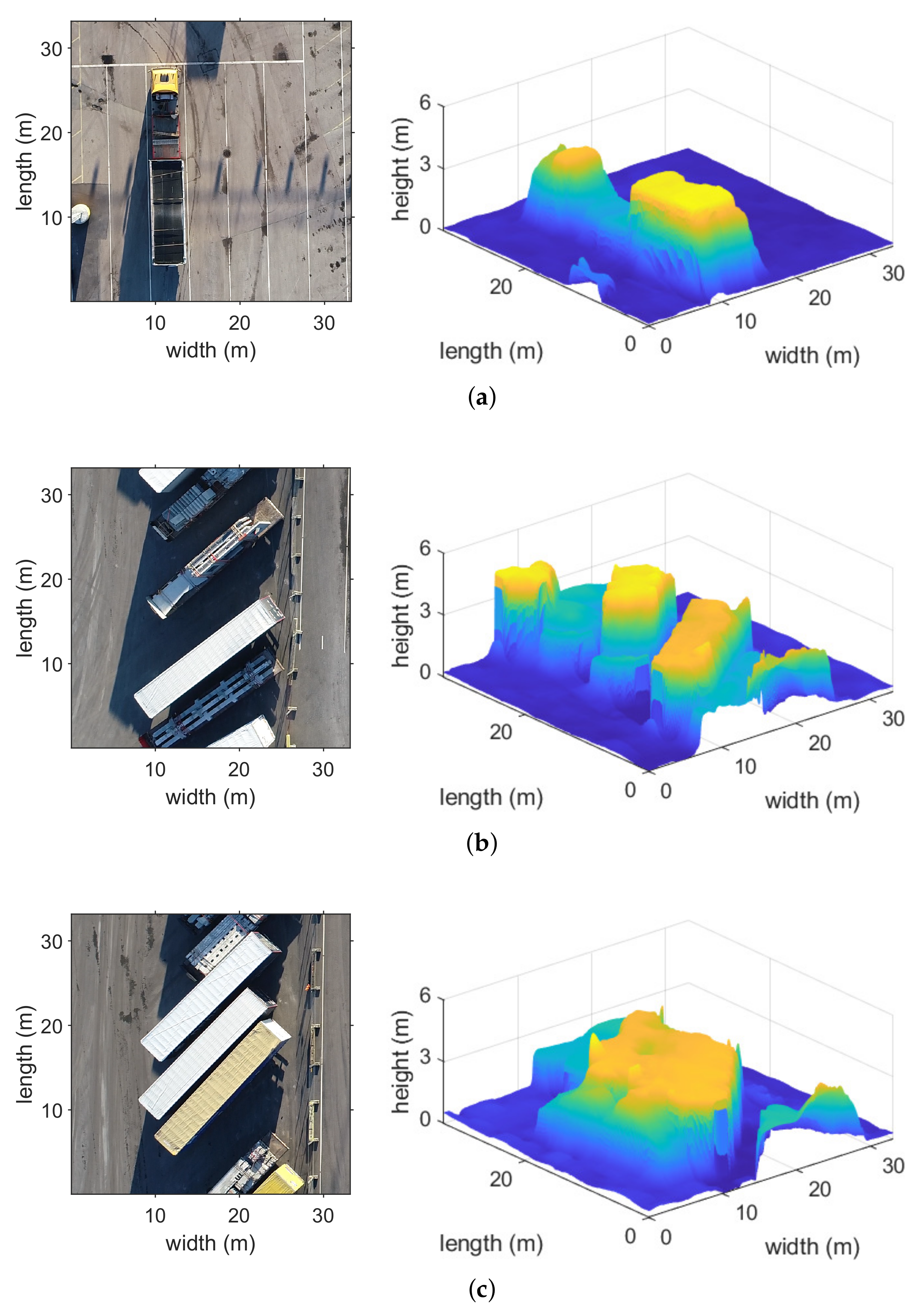
2.1.3. 3D Feature Map
2.2. Change Detection Unit
2.2.1. 3D Feature Map Registration
2.2.2. 3D Comparison Model
2.2.3. Change Detection Model
3. Experimental Results and Discussion
4. Conclusions
5. Patent
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Zhan, Y.; Fu, K.; Yan, M.; Sun, X.; Wang, H.; Qiu, X. Change detection based on deep siamese convolutional network for optical aerial images. IEEE Geosci. Remote Sens. Lett. 2017, 14, 1845–1849. [Google Scholar] [CrossRef]
- Ali-Sisto, D.; Packalen, P. Forest change detection by using point clouds from dense image matching together with a liDAR-derived terrain model. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2017, 10, 1197–1206. [Google Scholar] [CrossRef]
- Jordan, S.; Moore, J.; Hovet, S.; Box, J.; Perry, J.; Kirsche, K.; Lewis, D.; Tse, Z. State-of-the-art technologies for UAV inspections. IET Radar Sonar Navig. 2018, 12, 151–164. [Google Scholar] [CrossRef]
- Yan, J.; Peng, Z.; Hong, H.; Chu, H.; Zhu, X.; Li, C. Vital-SAR-imaging with a drone-based hybrid radar system. IEEE Trans. Microw. Theory Tech. 2018, 66, 5852–5862. [Google Scholar] [CrossRef]
- Bazi, Y.; Melgani, F. Convolutional SVM networks for object detection in UAV imagery. IEEE Trans. Geosci. Remote Sens. 2018, 56, 3107–3118. [Google Scholar] [CrossRef]
- Stockdale, C.A.; Bozzini, C.; Macdonald, S.E.; Higgs, E. Extracting ecological information from oblique angle terrestrial landscape photographs: Performance evaluation of the WSL monoplotting tool. Appl. Geogr. 2015, 63, 315–325. [Google Scholar] [CrossRef]
- Song, F.; Dan, T.; Yu, R.; Yang, K.; Tang, Y.; Chen, W.; Gao, X.; Ong, S. Small UAV-based multi-temporal change detection for monitoring cultivated land cover changes in mountainous terrain. Remote Sens. Lett. 2019, 10, 573–582. [Google Scholar] [CrossRef]
- Celik, T. Unsupervised change detection in satellite images using principal component analysis and k-means clustering. IEEE Geosci. Remote Sens. Lett. 2009, 6, 772–776. [Google Scholar] [CrossRef]
- Benedek, C.; Szirányi, T. Change detection in optical aerial images by a multilayer conditional mixed Markov model. IEEE Trans. Geosci. Remote Sens. 2009, 47, 3416–3430. [Google Scholar] [CrossRef] [Green Version]
- Singh, P.; Kato, Z.; Zerubia, J. A multilayer Markovian model for change detection in aerial image pairs with large time differences. In Proceedings of the 2014 22nd International Conference on Pattern Recognition, Stockholm, Sweden, 24–28 August 2014; pp. 924–929. [Google Scholar] [CrossRef] [Green Version]
- Liu, J.; Gong, M.; Qin, K.; Zhang, P. A deep convolutional coupling network for change detection based on heterogeneous optical and radar images. IEEE Trans. Neural Netw. Learn. Syst. 2018, 29, 545–559. [Google Scholar] [CrossRef] [PubMed]
- Ma, W.; Yang, H.; Wu, Y.; Xiong, Y.; Hu, T.; Jiao, L.; Hou, B. Change Detection Based on Multi-Grained Cascade Forest and Multi-Scale Fusion for SAR Images. Remote Sens. 2019, 11, 142. [Google Scholar] [CrossRef] [Green Version]
- Hirschmuller, H. Stereo processing by semiglobal matching and mutual information. IEEE Trans. Pattern Anal. Mach. Intell. 2008, 30, 328–341. [Google Scholar] [CrossRef] [PubMed]
- Zang, Y.; Yang, B.; Li, J.; Guan, H. An accurate TLS and UAV image point clouds registration method for deformation detection of chaotic hillside areas. Remote Sens. 2019, 11, 647. [Google Scholar] [CrossRef] [Green Version]
- James, M.R.; Robson, S.; Smith, M.W. 3-D uncertainty-based topographic change detection with structure-from-motion photogrammetry: Precision maps for ground control and directly georeferenced surveys. Earth Surf. Process. Landf. 2017, 42, 1769–1788. [Google Scholar] [CrossRef]
- Barber, D.M.; Holland, D.; Mills, J.P. Change detection for topographic mapping using threedimensional data structures. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2008, 37, 1177–1182. [Google Scholar]
- Alcantarilla, P.F.; Stent, S.; Ros, G.; Gherardi, R. Street-view change detection with deconvolutional networks. Auton. Robot. 2018, 42, 1301–1322. [Google Scholar] [CrossRef]
- Chen, B.; Deng, L.; Duan, Y.; Huang, S.; Zhou, J. Building change detection based on 3D reconstruction. In Proceedings of the IEEE International Conference on Image Processing (ICIP), Quebec City, QC, Canada, 27–30 September 2015; pp. 4126–4130. [Google Scholar] [CrossRef]
- Finman, R.; Whelan, T.; Kaess, M.; Leonard, J.J. Toward lifelong object segmentation from change detection in dense RGB-D maps. In Proceedings of the European Conference on Mobile Robots, Barcelona, Spain, 25–27 September 2013; pp. 178–185. [Google Scholar] [CrossRef] [Green Version]
- Kahn, S.; Bockholt, U.; Kuijper, A.; Fellner, D.W. Towards precise real-time 3D difference detection for industrial applications. Comput. Ind. 2013, 64, 1115–1128. [Google Scholar] [CrossRef]
- Sharifzadeh, S.; Baharlou, S.M.; Berrendorf, M.; Koner, R.; Tresp, V. Improving visual relation detection using depth maps. arXiv 2019, arXiv:1905.00966. [Google Scholar]
- Tyagi, A.; Drinkard, J.; Tani, Y.; Kinoshita, K. Method and Apparatus for Projective Volume Monitoring. U.S. Patent US20160203371A1, 14 July 2016. [Google Scholar]
- Kaehler, A.; Bradski, G. Camera models and calibration. In Learning OpenCV 3: Computer Vision in C++ with the OpenCV Library, 1st ed.; O’Reilly Media Inc.: Newton, MA, USA, 2016; pp. 637–664. [Google Scholar]
- Rumpler, M.; Tscharf, A.; Mostegel, C.; Daftry, S.; Hoppe, C.; Prettenthaler, R.; Fraundorfer, F.; Mayer, G.; Bischof, H. Evaluations on multi-scale camera networks for precise and geo-accurate reconstructions from aerial and terrestrial images with user guidance. Comput. Vis. Image Underst. 2017, 157, 255–273. [Google Scholar] [CrossRef] [Green Version]
- Hartley, R.; Zisserman, A. Pojective geometry and transformations of 2D. In Multiple View Geometry in Computer Vision, 2nd ed.; Cambridge University Press: Cambridge, MA, USA, 2003; pp. 32–37. [Google Scholar]
- Lowe, D.G. Object recognition from local scale-invariant features. In Proceedings of the 7th IEEE International Conference on Computer Vision, Kerkyra, Greece, 20–25 September 1999; pp. 1150–1157. [Google Scholar] [CrossRef]
- Muja, M.; Lowe, D.G. Fast approximate nearest neighbors with automatic algorithm configuration. In Proceedings of the International Conference Computer Vision Theory and Applications, Lisboa, Portugal, 5–8 February 2009; pp. 331–340. [Google Scholar]
- Kumar, R.; Anandan, P.; Hanna, K. Direct recovery of shape from multiple views: A parallax based approach. In Proceedings of the 12th IAPR International Conference on Pattern Recognition—Conference A: Computer Vision & Image Processing, Jerusalem, Israel, 9–13 October 1994; pp. 685–688. [Google Scholar] [CrossRef]
- Farnebäck, G. Two-frame motion estimation based on polynomial expansion. In Proceedings of the 13th Scandinavian Conference on Image Analysis, Halmstad, Sweden, 29 June–2 July 2003; pp. 363–370. [Google Scholar] [CrossRef] [Green Version]
- Javadi, S.; Dahl, M.; Pettersson, M.I. Change detection in aerial images using a Kendall’s TAU distance pattern correlation. In Proceedings of the 2016 6th European Workshop on Visual Information Processing (EUVIP), Marseille, France, 25–27 October 2016; pp. 1–6. [Google Scholar] [CrossRef]
- Popielski, P.; Wróbel, Z. The feature detection on the homogeneous surfaces with projected pattern. In Information Technologies in Biomedicine. Lecture Notes in Computer Science; Piętka, E., Kawa, J., Eds.; Springer: Berlin/Heidelberg, Germany, 2012; pp. 118–128. [Google Scholar] [CrossRef]
- Agisoft Metashape. Available online: https://www.agisoft.com (accessed on 7 April 2020).
- Pix4Dmapper. Available online: https://www.pix4d.com (accessed on 7 April 2020).





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Comparison Model | FPR (%) | TPR (%) | ACC (%) |
|---|---|---|---|
| Kendall’s Tau-d model | 19.49 | 57.07 | 73.11 |
| with and | |||
| 3D model with | 17.89 | 88.65 | 84.17 |
| 3D model with | 22.21 | 92.93 | 82.56 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Javadi, S.; Dahl, M.; I. Pettersson, M. Change Detection in Aerial Images Using Three-Dimensional Feature Maps. Remote Sens. 2020, 12, 1404. https://doi.org/10.3390/rs12091404
Javadi S, Dahl M, I. Pettersson M. Change Detection in Aerial Images Using Three-Dimensional Feature Maps. Remote Sensing. 2020; 12(9):1404. https://doi.org/10.3390/rs12091404
Chicago/Turabian StyleJavadi, Saleh, Mattias Dahl, and Mats I. Pettersson. 2020. "Change Detection in Aerial Images Using Three-Dimensional Feature Maps" Remote Sensing 12, no. 9: 1404. https://doi.org/10.3390/rs12091404