Predictive Analytics for Identifying Land Cover Change Hotspots in the Mekong Region

 , , , ,
, , , ,  ,
,
Abstract
1. Introduction
2. Materials and Methods
2.1. Study Region
2.2. Data Description
Data Sampling
2.3. Modeling
2.3.1. Data Sources
Remote Sensing Composites
Population Density
Infrastructure
Forest Data
Surface Water
Terrain Data
Cross-Correlation and Crop Cycle
Night Light
Other Indices
3. Results
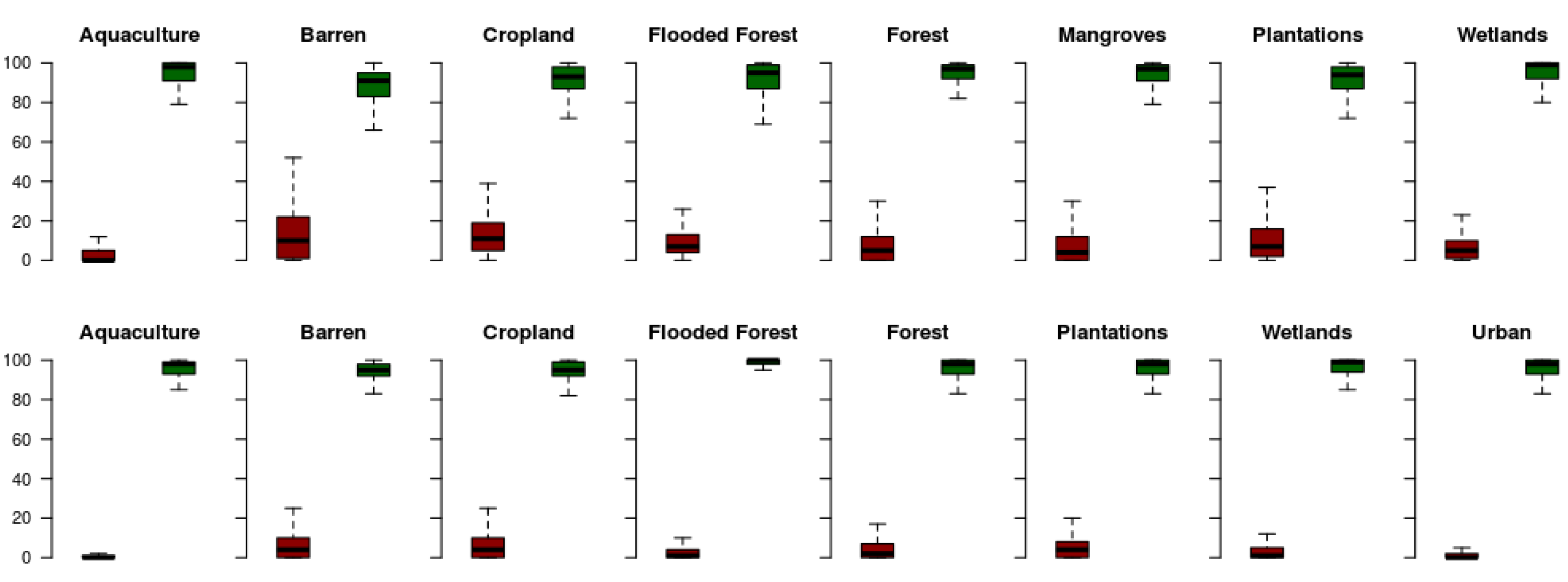
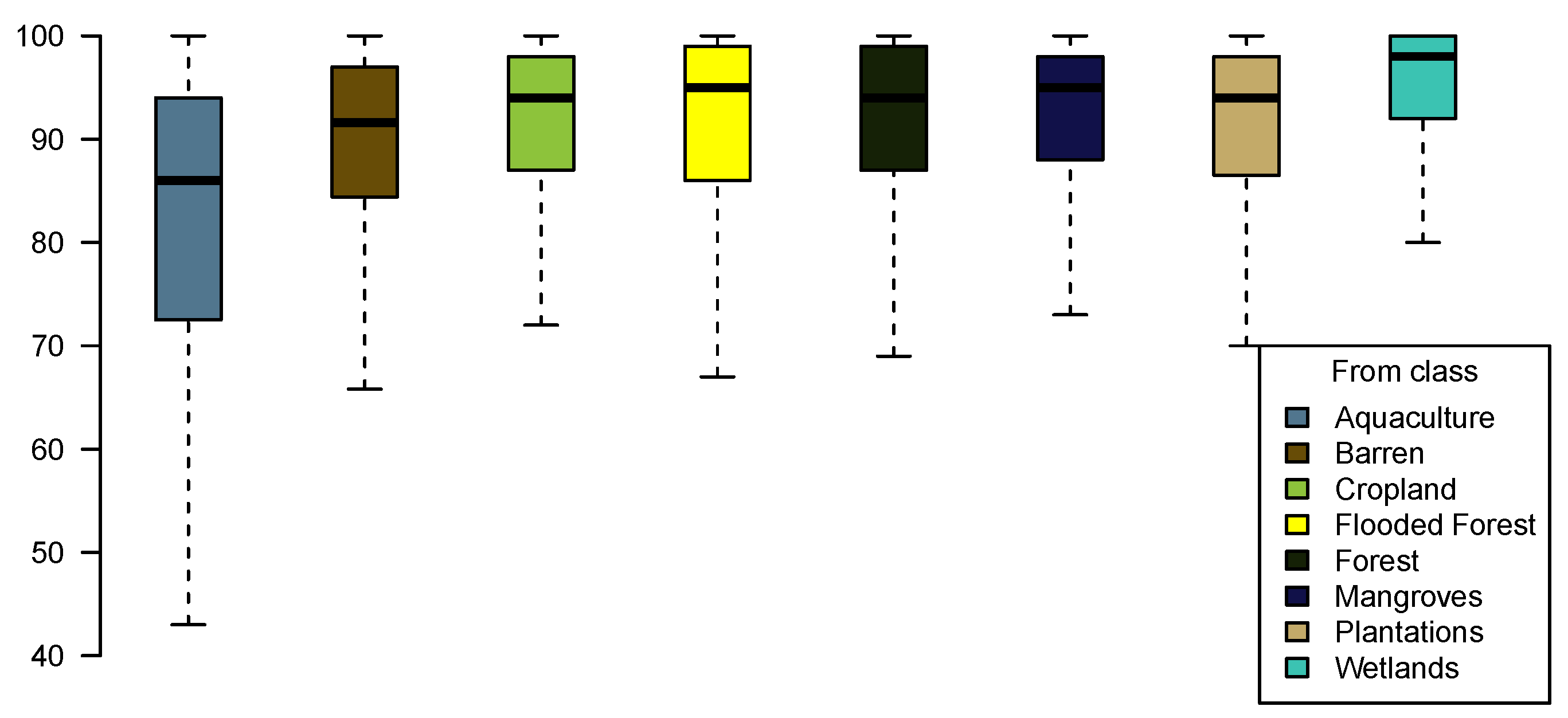
3.1. Spatial Change Dynamics
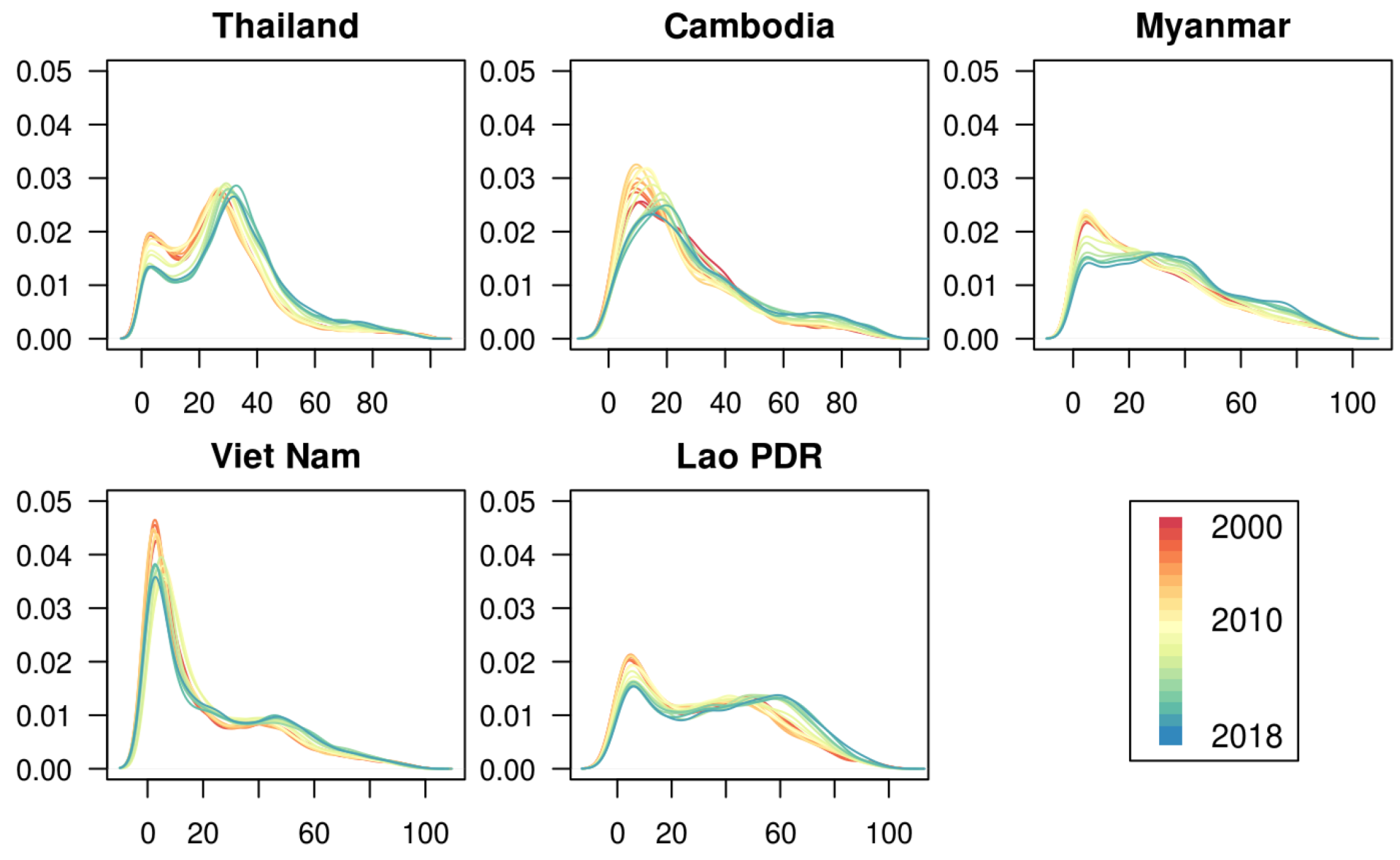
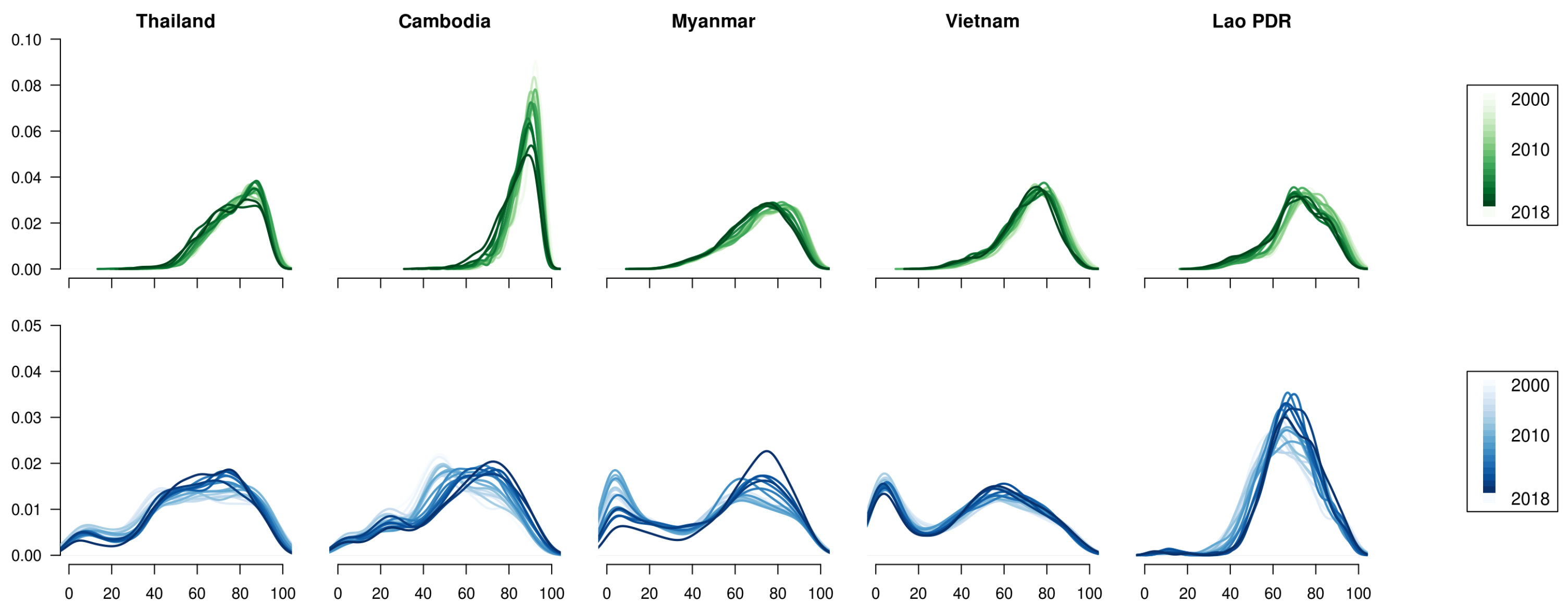
3.2. Temporal Change Dynamics
4. Discussion
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Houghton, R.A.; House, J.; Pongratz, J.; Van Der Werf, G.; DeFries, R.; Hansen, M.; Quéré, C.L.; Ramankutty, N. Carbon emissions from land use and land-cover change. Biogeosciences 2012, 9, 5125–5142. [Google Scholar] [CrossRef]
- Poortinga, A.; Tenneson, K.; Shapiro, A.; Nquyen, Q.; San Aung, K.; Chishtie, F.; Saah, D. Mapping plantations in Myanmar by fusing landsat-8, sentinel-2 and sentinel-1 data along with systematic error quantification. Remote Sens. 2019, 11, 831. [Google Scholar] [CrossRef]
- Poortinga, A.; Nguyen, Q.; Tenneson, K.; Troy, A.; Bhandari, B.; Ellenburg, W.L.; Aekakkararungroj, A.; Ha, L.T.; Pham, H.; Nguyen, G.V.; et al. Linking earth observations for assessing the food security situation in Vietnam: A landscape approach. Front. Environ. Sci. 2019, 7, 186. [Google Scholar] [CrossRef]
- Bewket, W. Land cover dynamics since the 1950s in Chemoga watershed, Blue Nile basin, Ethiopia. Mountain Res. Dev. 2002, 22, 263–270. [Google Scholar] [CrossRef]
- Stürck, J.; Poortinga, A.; Verburg, P.H. Mapping ecosystem services: The supply and demand of flood regulation services in Europe. Ecol. Indicat. 2014, 38, 198–211. [Google Scholar] [CrossRef]
- Poortinga, A.; Bastiaanssen, W.; Simons, G.; Saah, D.; Senay, G.; Fenn, M.; Bean, B.; Kadyszewski, J. A self-calibrating runoff and streamflow remote sensing model for ungauged basins using open-access earth observation data. Remote Sens. 2017, 9, 86. [Google Scholar] [CrossRef]
- Trisurat, Y.; Alkemade, R.; Verburg, P.H. Projecting land-use change and its consequences for biodiversity in Northern Thailand. Environ. Manag. 2010, 45, 626–639. [Google Scholar] [CrossRef] [PubMed]
- Tizora, P.; le Roux, A.; Mans, G.; Cooper, A.K. Adapting the Dyna-CLUE model for simulating land use and land cover change in the Western Cape Province. S. Afr. J. Geomat. 2018, 7, 190–203. [Google Scholar] [CrossRef]
- Verburg, P.H. Simulating feedbacks in land use and land cover change models. Landsc. Ecol. 2006, 21, 1171–1183. [Google Scholar] [CrossRef]
- Verburg, P.H.; Schot, P.P.; Dijst, M.J.; Veldkamp, A. Land use change modelling: Current practice and research priorities. GeoJournal 2004, 61, 309–324. [Google Scholar] [CrossRef]
- Schaldach, R.; Priess, J.A. Integrated Models of the Land System: A Review of Modelling Approaches on the Regional to Global Scale. Living Rev. Landsc. Res. 2008, 2. [Google Scholar] [CrossRef]
- Matthews, R.B.; Gilbert, N.G.; Roach, A.; Polhill, J.G.; Gotts, N.M. Agent-based land-use models: A review of applications. Landsc. Ecol. 2007, 22, 1447–1459. [Google Scholar] [CrossRef]
- Saah, D.; Tenneson, K.; Poortinga, A.; Nguyen, Q.; Chishtie, F.; San Aung, K.; Markert, K.N.; Clinton, N.; Anderson, E.R.; Cutter, P.; et al. Primitives as building blocks for constructing land cover maps. Int. J. Appl. Earth Obs. Geoinf. 2020, 85, 101979. [Google Scholar] [CrossRef]
- Saah, D.; Tenneson, K.; Matin, M.; Uddin, K.; Cutter, P.; Poortinga, A.; Ngyuen, Q.H.; Patterson, M.; Johnson, G.; Markert, K.; et al. Land cover mapping in data scarce environments: Challenges and opportunities. Front. Environ. Sci. 2019, 7, 150. [Google Scholar] [CrossRef]
- Simons, G.; Poortinga, A.; Bastiaanssen, W.G.; Saah, D.; Troy, D.; Hunink, J.; Klerk, M.d.; Rutten, M.; Cutter, P.; Rebelo, L.M.; et al. On Spatially Distributed Hydrological Ecosystem Services: Bridging the Quantitative Information Gap using Remote Sensing and Hydrological Models; CGIAR: Wageningen, The Netherlands, 2017. [Google Scholar]
- Phongsapan, K.; Chishtie, F.; Poortinga, A.; Bhandari, B.; Meechaiya, C.; Kunlamai, T.; Aung, K.S.; Saah, D.; Anderson, E.; Markert, K.; et al. Operational flood risk index mapping for disaster risk reduction using Earth Observations and cloud computing technologies: A case study on Myanmar. Front. Environ. Sci. 2019, 7, 191. [Google Scholar] [CrossRef]
- Pal, M. Random forest classifier for remote sensing classification. Int. J. Remote Sens. 2005, 26, 217–222. [Google Scholar] [CrossRef]
- Fernández-Delgado, M.; Cernadas, E.; Barro, S.; Amorim, D. Do we need hundreds of classifiers to solve real world classification problems? J. Mach. Learn. Res. 2014, 15, 3133–3181. [Google Scholar]
- Zhu, Z.; Woodcock, C.E. Object-based cloud and cloud shadow detection in Landsat imagery. Remote Sens. Environ. 2012, 118, 83–94. [Google Scholar] [CrossRef]
- Young, N.E.; Anderson, R.S.; Chignell, S.M.; Vorster, A.G.; Lawrence, R.; Evangelista, P.H. A survival guide to Landsat preprocessing. Ecology 2017, 98, 920–932. [Google Scholar] [CrossRef]
- Chastain, R.; Housman, I.; Goldstein, J.; Finco, M. Empirical cross sensor comparison of Sentinel-2A and 2B MSI, Landsat-8 OLI, and Landsat-7 ETM+ top of atmosphere spectral characteristics over the conterminous United States. Remote Sens. Environ. 2019, 221, 274–285. [Google Scholar] [CrossRef]
- Roy, D.P.; Ju, J.; Lewis, P.; Schaaf, C.; Gao, F.; Hansen, M.; Lindquist, E. Multi-temporal MODIS–Landsat data fusion for relative radiometric normalization, gap filling, and prediction of Landsat data. Remote Sens. Environ. 2008, 112, 3112–3130. [Google Scholar] [CrossRef]
- Gao, F.; He, T.; Masek, J.G.; Shuai, Y.; Schaaf, C.B.; Wang, Z. Angular effects and correction for medium resolution sensors to support crop monitoring. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2014, 7, 4480–4489. [Google Scholar] [CrossRef]
- Roy, D.P.; Li, J.; Zhang, H.K.; Yan, L.; Huang, H.; Li, Z. Examination of Sentinel-2A multi-spectral instrument (MSI) reflectance anisotropy and the suitability of a general method to normalize MSI reflectance to nadir BRDF adjusted reflectance. Remote Sens. Environ. 2017, 199, 25–38. [Google Scholar] [CrossRef]
- Lucht, W.; Schaaf, C.B.; Strahler, A.H. An algorithm for the retrieval of albedo from space using semiempirical BRDF models. IEEE Trans. Geosci. Remote Sens. 2000, 38, 977–998. [Google Scholar] [CrossRef]
- Roy, D.P.; Zhang, H.; Ju, J.; Gomez-Dans, J.L.; Lewis, P.E.; Schaaf, C.; Sun, Q.; Li, J.; Huang, H.; Kovalskyy, V. A general method to normalize Landsat reflectance data to nadir BRDF adjusted reflectance. Remote Sens. Environ. 2016, 176, 255–271. [Google Scholar] [CrossRef]
- Justice, C.O.; Wharton, S.W.; Holben, B. Application of digital terrain data to quantify and reduce the topographic effect on Landsat data. Int. J. Remote Sens. 1981, 2, 213–230. [Google Scholar] [CrossRef]
- Smith, J.; Lin, T.L.; Ranson, K. The Lambertian assumption and Landsat data. Photogram. Eng. Remote Sens. 1980, 46, 1183–1189. [Google Scholar]
- Teillet, P.; Guindon, B.; Goodenough, D. On the slope-aspect correction of multispectral scanner data. Can. J. Remote Sens. 1982, 8, 84–106. [Google Scholar] [CrossRef]
- Soenen, S.A.; Peddle, D.R.; Coburn, C.A. SCS+ C: A modified sun-canopy-sensor topographic correction in forested terrain. IEEE Trans. Geosci. Remote Sens. 2005, 43, 2148–2159. [Google Scholar] [CrossRef]
- Flood, N. Seasonal composite Landsat TM/ETM+ images using the medoid (a multi-dimensional median). Remote Sens. 2013, 5, 6481–6500. [Google Scholar] [CrossRef]
- Vermote, E.; Vermeulen, A. Atmospheric correction algorithm: Spectral reflectances (MOD09). ATBD Vers. 1999, 4, 1–107. [Google Scholar]
- Jiang, Z.; Huete, A.R.; Didan, K.; Miura, T. Development of a two-band enhanced vegetation index without a blue band. Remote Sens. Environ. 2008, 112, 3833–3845. [Google Scholar] [CrossRef]
- Xu, H. A new index for delineating built-up land features in satellite imagery. Int. J. Remote Sens. 2008, 29, 4269–4276. [Google Scholar] [CrossRef]
- McFeeters, S.K. The use of the Normalized Difference Water Index (NDWI) in the delineation of open water features. Int. J. Remote Sens. 1996, 17, 1425–1432. [Google Scholar] [CrossRef]
- Salomonson, V.V.; Appel, I. Estimating fractional snow cover from MODIS using the normalized difference snow index. Remote Sens. Environ. 2004, 89, 351–360. [Google Scholar] [CrossRef]
- Rouse, J., Jr.; Haas, R.; Schell, J.; Deering, D. Monitoring Vegetation Systems in the Great Plains With ERTS; NASA: Washington, DC, USA, 1974. [Google Scholar]
- Key, C.H.; Benson, N.C. The Normalized Burn Ratio (NBR): A Landsat TM Radiometric Measure Of Burn Severity; United States Geological Survey, Northern Rocky Mountain Science Center: Bozeman, MT, USA, 1999. [Google Scholar]
- Crist, E.P.; Cicone, R.C. A physically-based transformation of Thematic Mapper data—The TM Tasseled Cap. IEEE Trans. Geosci. Remote Sens. 1984, 256–263. [Google Scholar] [CrossRef]
- Contributors, O. Planet Dump. 2017. Available online: https://www.openstreetmap.org (accessed on 4 May 2020).
- Farr, T.G.; Rosen, P.A.; Caro, E.; Crippen, R.; Duren, R.; Hensley, S.; Kobrick, M.; Paller, M.; Rodriguez, E.; Roth, L.; et al. The shuttle radar topography mission. Rev. Geophys. 2007, 45. [Google Scholar] [CrossRef]
- Potapov, P.; Tyukavina, A.; Turubanova, S.; Talero, Y.; Hernandez-Serna, A.; Hansen, M.; Saah, D.; Tenneson, K.; Poortinga, A.; Aekakkararungroj, A.; et al. Annual continuous fields of woody vegetation structure in the Lower Mekong region from 2000–2017 Landsat time-series. Remote Sens. Environ. 2019, 232, 111278. [Google Scholar] [CrossRef]
- Tatem, A.J. WorldPop, open data for spatial demography. Sci. Data 2017, 4. [Google Scholar] [CrossRef]
- Funk, C.; Peterson, P.; Landsfeld, M.; Pedreros, D.; Verdin, J.; Shukla, S.; Husak, G.; Rowland, J.; Harrison, L.; Hoell, A.; et al. The climate hazards infrared precipitation with stations—A new environmental record for monitoring extremes. Sci. Data 2015, 2, 150066. [Google Scholar] [CrossRef]
- Olson, D.M.; Dinerstein, E.; Wikramanayake, E.D.; Burgess, N.D.; Powell, G.V.; Underwood, E.C.; D’amico, J.A.; Itoua, I.; Strand, H.E.; Morrison, J.C.; et al. Terrestrial Ecoregions of the World: A New Map of Life on EarthA new global map of terrestrial ecoregions provides an innovative tool for conserving biodiversity. BioScience 2001, 51, 933–938. [Google Scholar] [CrossRef]
- Pekel, J.F.; Cottam, A.; Gorelick, N.; Belward, A.S. High-resolution mapping of global surface water and its long-term changes. Nature 2016, 540, 418. [Google Scholar] [CrossRef] [PubMed]
- Stevens, F.R.; Gaughan, A.E.; Linard, C.; Tatem, A.J. Disaggregating census data for population mapping using random forests with remotely-sensed and ancillary data. PLoS ONE 2015, 10, e0107042. [Google Scholar] [CrossRef] [PubMed]
- Hansen, M.C.; Egorov, A.; Roy, D.P.; Potapov, P.; Ju, J.; Turubanova, S.; Kommareddy, I.; Loveland, T.R. Continuous fields of land cover for the conterminous United States using Landsat data: First results from the Web-Enabled Landsat Data (WELD) project. Remote Sens. Lett. 2011, 2, 279–288. [Google Scholar] [CrossRef]
- Hansen, M.C.; Potapov, P.V.; Goetz, S.J.; Turubanova, S.; Tyukavina, A.; Krylov, A.; Kommareddy, A.; Egorov, A. Mapping tree height distributions in Sub-Saharan Africa using Landsat 7 and 8 data. Remote Sens. Environ. 2016, 185, 221–232. [Google Scholar] [CrossRef]
- Trimble, G.R., Jr.; Weitzman, S. Site index studies of upland oaks in the northern Appalachians. Forest Sci. 1956, 2, 162–173. [Google Scholar]
- Beers, T.W.; Dress, P.E.; Wensel, L.C. Notes and observations: Aspect transformation in site productivity research. J. For. 1966, 64, 691–692. [Google Scholar]
- Jeswani, R.; Kulshrestha, A.; Gupta, P.K.; Srivastav, S. Evaluation of the consistency of DMSP-OLS and SNPP-VIIRS Night-time Light Datasets. Master’s Thesis, University of Twente, Enschede, The Netherland, 2017. [Google Scholar]
- Saah, D.; Johnson, G.; Ashmall, B.; Tondapu, G.; Tenneson, K.; Patterson, M.; Poortinga, A.; Markert, K.; Quyen, N.H.; San Aung, K.; et al. Collect Earth: An online tool for systematic reference data collection in land cover and use applications. Environ. Model. Softw. 2019. [Google Scholar] [CrossRef]
- Xu, L.; Li, Z.; Song, H.; Yin, H. Land-use planning for urban sprawl based on the clue-s model: A Case study of Guangzhou, China. Entropy 2013, 15, 3490–3506. [Google Scholar] [CrossRef]
- Poortinga, A.; Clinton, N.; Saah, D.; Cutter, P.; Chishtie, F.; Markert, K.N.; Anderson, E.R.; Troy, A.; Fenn, M.; Tran, L.H.; et al. An Operational Before-After-Control-Impact (BACI) Designed Platform for Vegetation Monitoring at Planetary Scale. Remote Sens. 2018, 10, 760. [Google Scholar] [CrossRef]
- Markert, K.; Schmidt, C.; Griffin, R.; Flores, A.; Poortinga, A.; Saah, D.; Muench, R.; Clinton, N.; Chishtie, F.; Kityuttachai, K.; et al. Historical and operational monitoring of surface sediments in the lower mekong basin using landsat and google earth engine cloud computing. Remote Sens. 2018, 10, 909. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Specific to Generic | Generic to Specific | ||||
|---|---|---|---|---|---|
| from | to | from | to | ||
| 1 | Aquaculture | Other | 9 | Other | Aquaculture |
| 2 | Barren | Other | 10 | Other | Barren |
| 3 | Cropland | Other | 11 | Other | Cropland |
| 4 | Flooded forest | Other | 12 | Other | Flooded forest |
| 5 | Forest | Other | 13 | Other | Forest |
| 6 | Mangroves | Other | 14 | Other | Plantations |
| 7 | Plantations | Other | 15 | Other | Wetlands |
| 8 | Wetlands | Other | 16 | Other | Urban |
| Name | Description | Reference |
|---|---|---|
| Blue | Band | Landsat |
| Nir | Band | Landsat |
| Red | Band | Landsat |
| Swir1 | Band | Landsat |
| Swir2 | Band | Landsat |
| Green | Band | Landsat |
| EVI | Enhanced Vegetation index | [33] |
| IBI | Index-based Built-Up Index | [34] |
| ND_blue_green | Normalized difference | |
| ND_blue_nir | Normalized difference | |
| ND_blue_red | Normalized difference | |
| ND_blue_swir1 | Normalized difference | |
| ND_blue_swir2 | Normalized difference | |
| ND_green_nir | Normalized difference | [35] |
| ND_green_red | Normalized difference | |
| ND_green_swir1 | Normalized difference | [36] |
| ND_green_swir2 | Normalized difference | |
| ND_nir_red | Normalized difference | [37] |
| ND_nir_swir1 | Normalized difference | [38] |
| ND_nir_swir2 | Normalized difference | [35] |
| ND_red_swir1 | Normalized difference | |
| ND_red_swir2 | Normalized difference | |
| ND_swir1_swir2 | Normalized difference | |
| R_red_swir1 | Ratio | |
| R_swir1_nir | Ratio | |
| SAVI | Soil Adjusted Vegetation Index | [33] |
| Brightness | Tasseled Cap | [39] |
| Fifth | Tasseled Cap | [39] |
| Fourth | Tasseled Cap | [39] |
| Greenness | Tasseled Cap | [39] |
| Sixth | Tasseled Cap | [39] |
| TcAngleBG | Tasseled Cap | [39] |
| TcAngleBW | Tasseled Cap | [39] |
| TcAngleGW | Tasseled Cap | [39] |
| TcDistBG | Tasseled Cap | [39] |
| TcDistBW | Tasseled Cap | [39] |
| TcDistGW | Tasseled Cap | [39] |
| Wetness | Tasseled Cap | [39] |
| Layer | Spatial Resolution (m) | Temporal Resolution | Description | Reference |
|---|---|---|---|---|
| Distance to building | 30 | single | OSM | [40] |
| Distance to domestic airport | 30 | single | OSM | [40] |
| Distance to international airport | 30 | single | OSM | [40] |
| Distance to power station | 30 | single | OSM | [40] |
| Distance to primary roads | 30 | single | OSM | [40] |
| Distance to secondary roads | 30 | single | OSM | [40] |
| Land cover map | 30 | yearly | RLCMS | [13] |
| Land cover map | 300 | yearly | RLCMS | [13] |
| Land cover map | 90 | yearly | RLCMS | [13] |
| Land cover map | 900 | yearly | RLCMS | [13] |
| Flow Accumulation | 30 | single | SRTM | [41] |
| Aspect | 30 | single | SRTM | [41] |
| Slope direction | 30 | single | SRTM | [41] |
| distance to Stream | 30 | single | srtm | [41] |
| slope orientation | 30 | single | SRTM | [41] |
| Elevation | 30 | single | SRTM | [41] |
| Height Above the Nearest Drainage | 30 | single | SRTM | [41] |
| Slope | 30 | single | SRTM | [41] |
| STRM | 30 | single | SRTM | [41] |
| Forest loss | 30 | yearly | UMD | [42] |
| Primary forests | 30 | single | UMD | [42] |
| Forest rotations | 30 | single | UMD | [42] |
| Tree canopy cover | 30 | yearly | UMD | [42] |
| Tree height | 30 | yearly | UMD | [42] |
| Population density | 30 | yearly | worldpop | [43] |
| Number of births | 1000 | single | Worldpop | [43] |
| Nightlights | 300 | yearly | VIIRS / DMSP-OLS | |
| Distance to coastline | 1000 | single | ||
| Country code | 30 | single | ||
| Eco regions | 30 | single | [45] | |
| Forest ecosystem | 30 | single | WWF | |
| Number of phone towers | 30 | single | OpenCellID | https://opencellid.org |
| protected areas | 30 | single | WDPA | https://www.protectedplanet.net |
| Max extent | 30 | single | JRC | [46] |
| Occurence | 30 | single | JRC | [46] |
| Change abs | 30 | single | JRC | [46] |
| Change norm | 30 | single | JRC | [46] |
| Seasonality | 30 | single | JRC | [46] |
| Recurrence | 30 | single | JRC | [46] |
| Transition | 30 | single | JRC | [46] |
| Max extent | 30 | single | JRC | [46] |
| Water | 30 | yearly | JRC | [46] |
| Precipitation | 5000 | yearly | CHIRPS | [44] |
| Crop rotations 1 | 500 | yearly | RLCMS | [13] |
| Crop rotations 2 | 500 | yearly | RLCMS | [13] |
| Crop rotations 3 | 500 | yearly | RLCMS | [13] |
| Cross correlation | 500 | yearly | RLCMS | [13] |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Poortinga, A.; Aekakkararungroj, A.; Kityuttachai, K.; Nguyen, Q.; Bhandari, B.; Soe Thwal, N.; Priestley, H.; Kim, J.; Tenneson, K.; Chishtie, F.; et al. Predictive Analytics for Identifying Land Cover Change Hotspots in the Mekong Region. Remote Sens. 2020, 12, 1472. https://doi.org/10.3390/rs12091472
Poortinga A, Aekakkararungroj A, Kityuttachai K, Nguyen Q, Bhandari B, Soe Thwal N, Priestley H, Kim J, Tenneson K, Chishtie F, et al. Predictive Analytics for Identifying Land Cover Change Hotspots in the Mekong Region. Remote Sensing. 2020; 12(9):1472. https://doi.org/10.3390/rs12091472
Chicago/Turabian StylePoortinga, Ate, Aekkapol Aekakkararungroj, Kritsana Kityuttachai, Quyen Nguyen, Biplov Bhandari, Nyein Soe Thwal, Hannah Priestley, Jiwon Kim, Karis Tenneson, Farrukh Chishtie, and et al. 2020. "Predictive Analytics for Identifying Land Cover Change Hotspots in the Mekong Region" Remote Sensing 12, no. 9: 1472. https://doi.org/10.3390/rs12091472
APA StylePoortinga, A., Aekakkararungroj, A., Kityuttachai, K., Nguyen, Q., Bhandari, B., Soe Thwal, N., Priestley, H., Kim, J., Tenneson, K., Chishtie, F., Towashiraporn, P., & Saah, D. (2020). Predictive Analytics for Identifying Land Cover Change Hotspots in the Mekong Region. Remote Sensing, 12(9), 1472. https://doi.org/10.3390/rs12091472