
Group Target Tracking Based on MS-MeMBer Filters



Abstract
:1. Introduction
2. Background
2.1. The Random Finite Set
2.2. The MS-MeMBer Filter
2.2.1. The Prediction Step
2.2.2. Multi-Sensor Measurement Partition
2.2.3. The Update Step
3. The Group Target Tracking
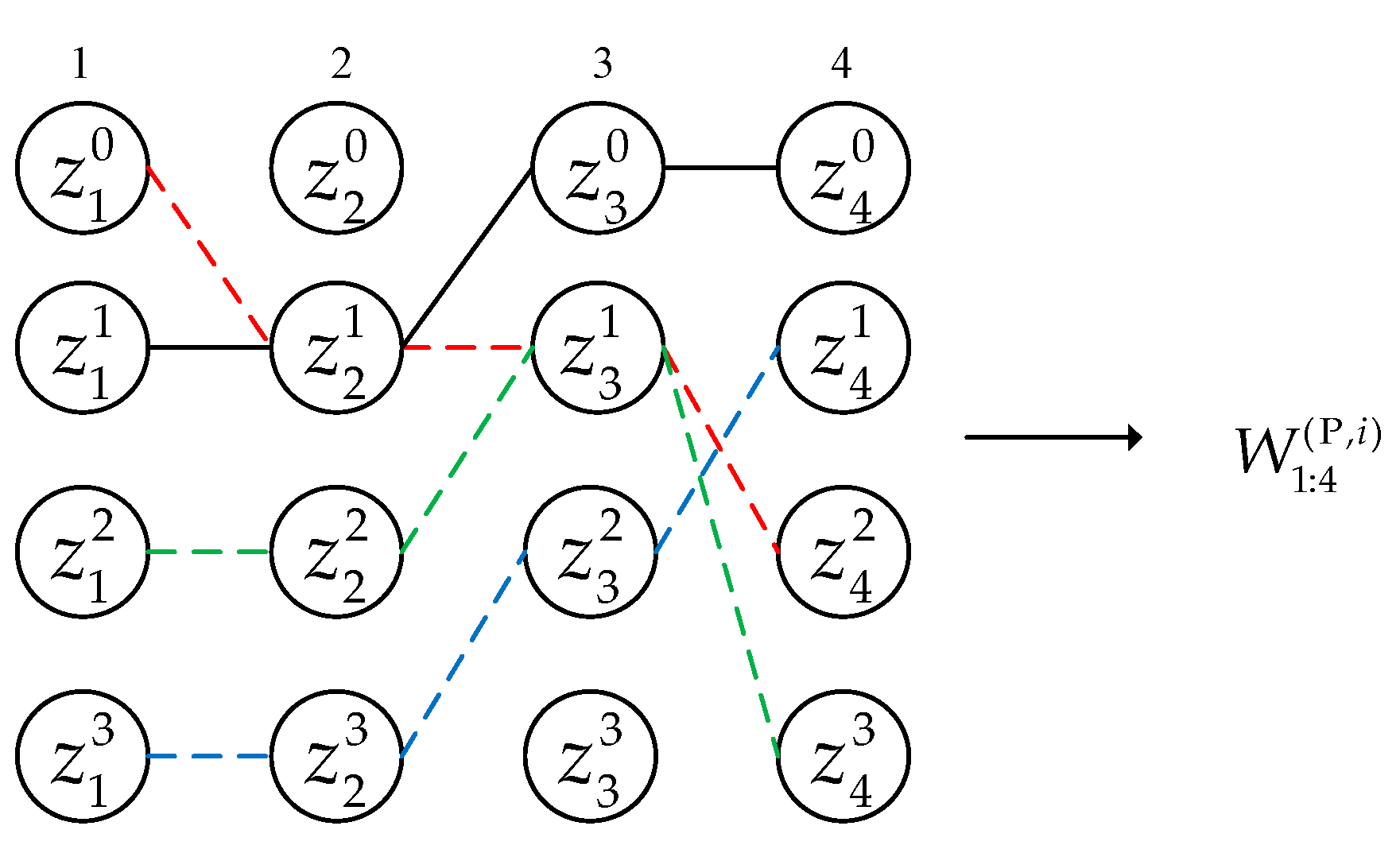
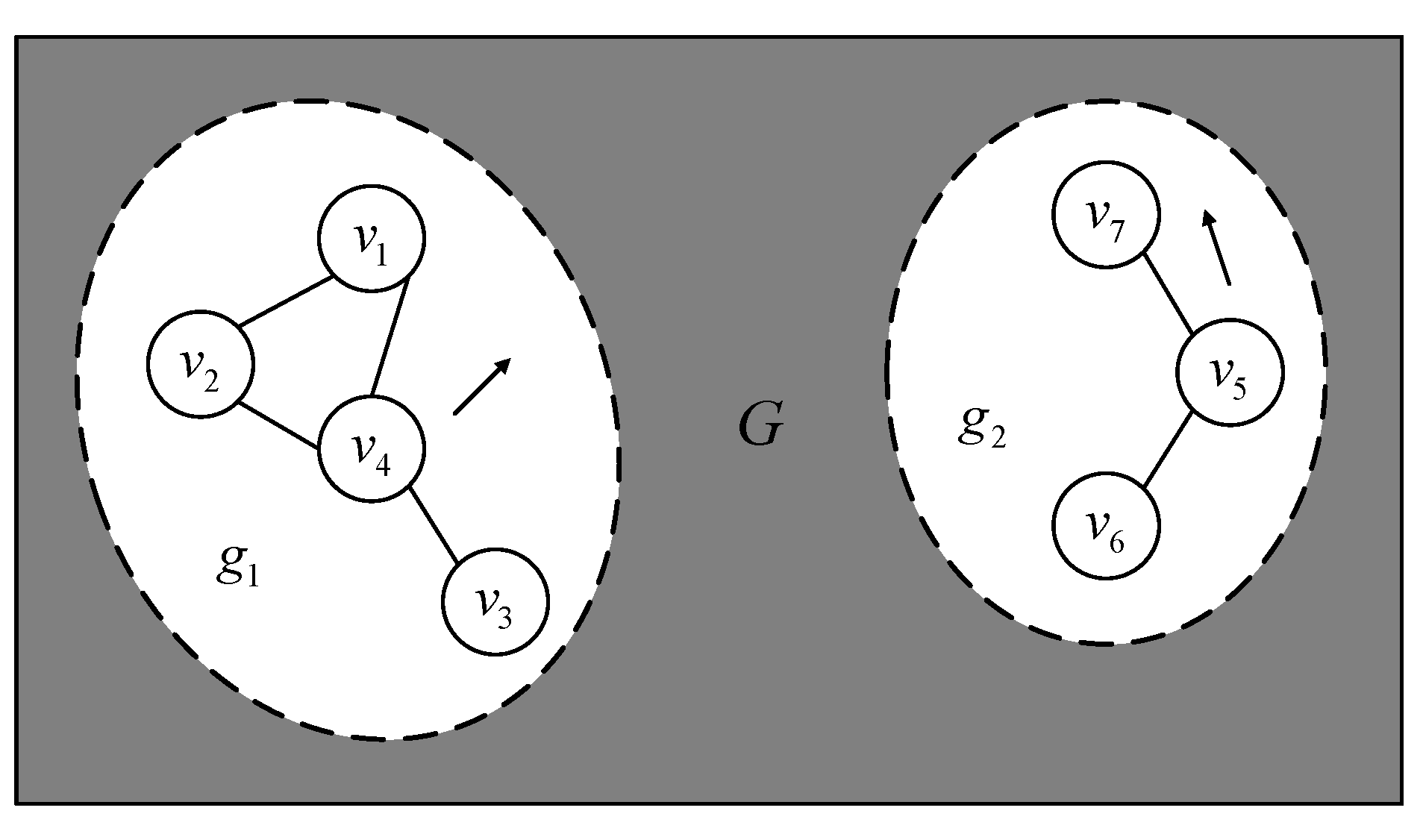
3.1. Graphical Representation of the Group
3.2. The System Model of Group Movement
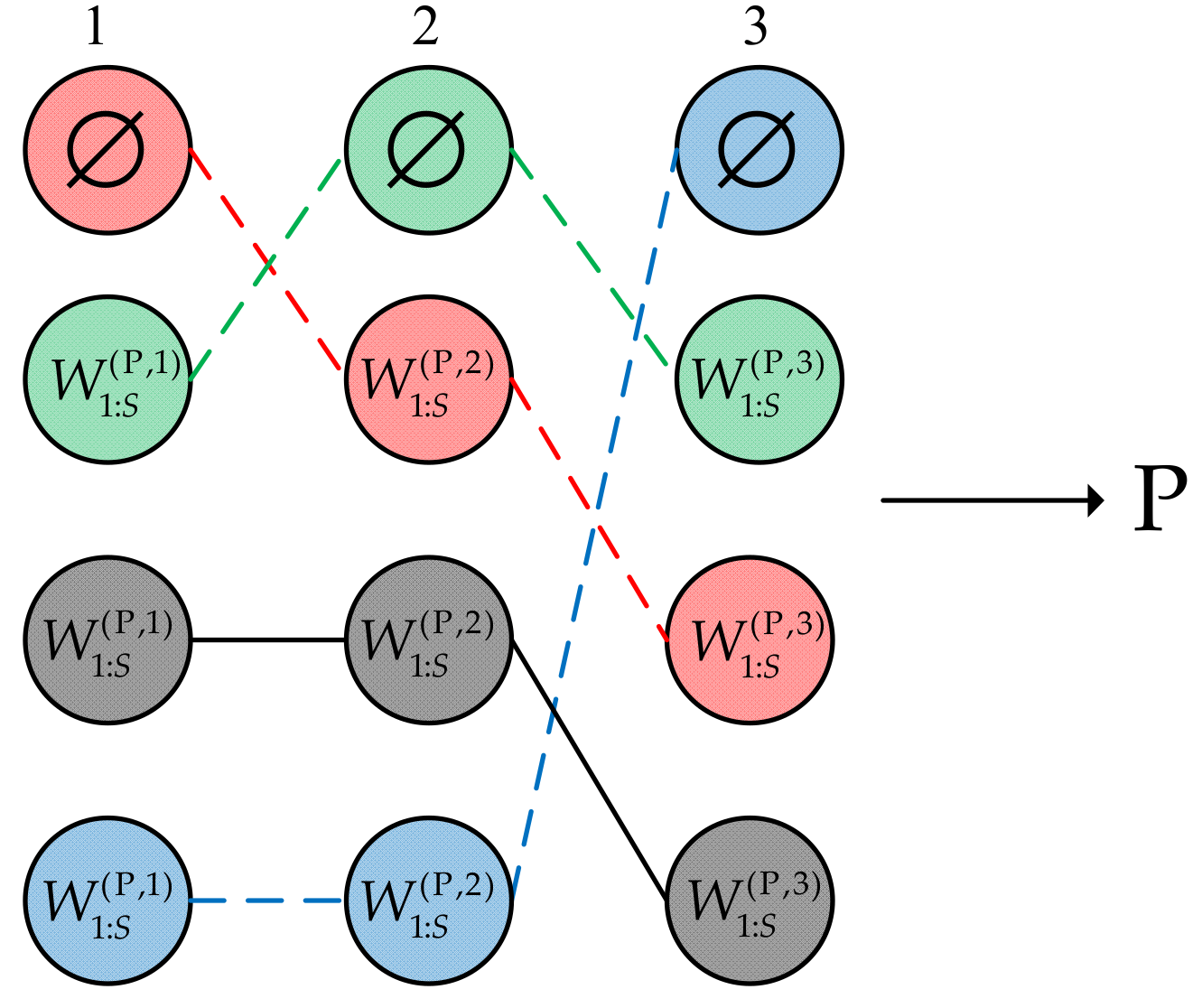
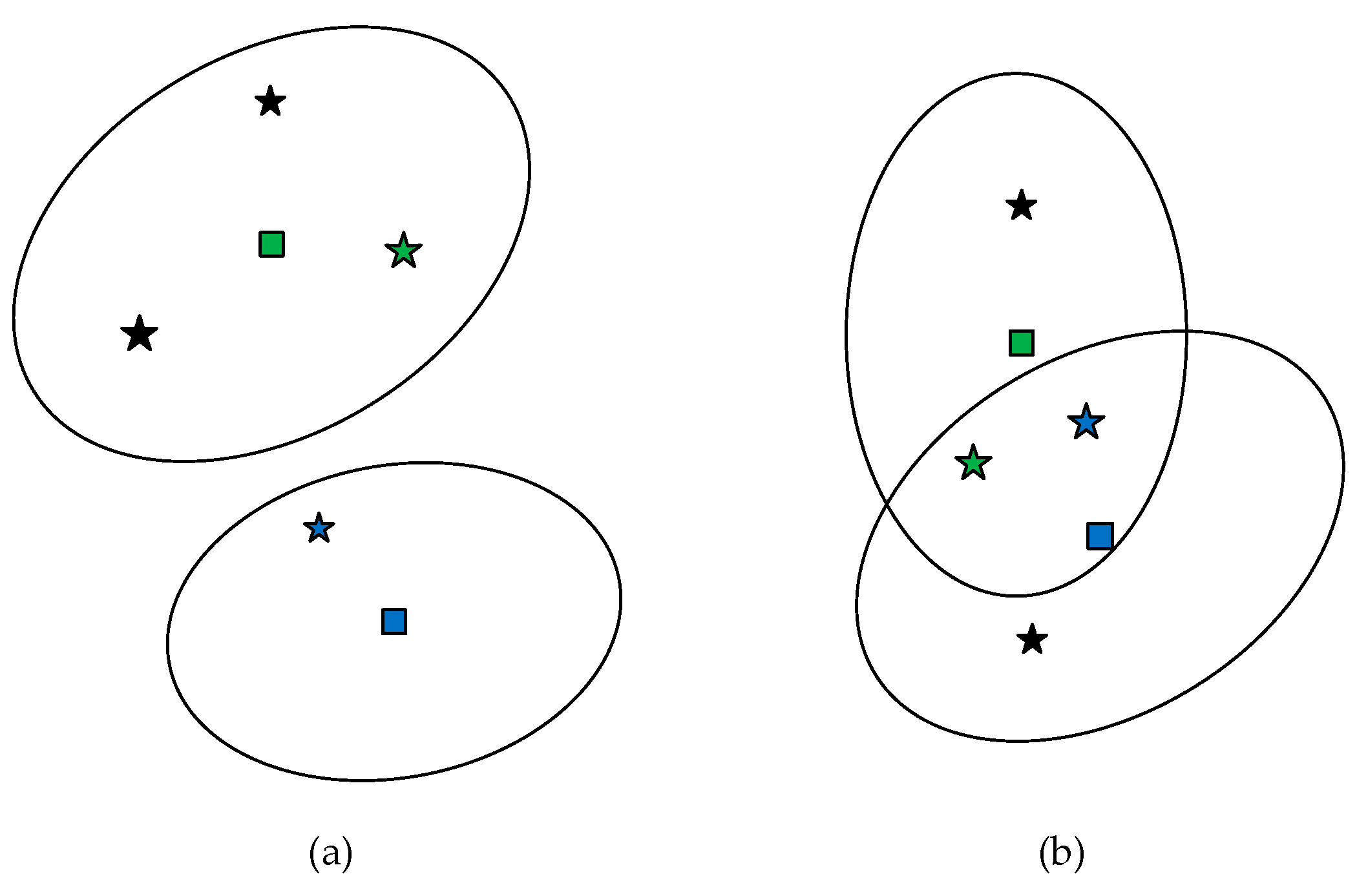
3.3. Multi-Sensor Measurement Partition and MDA
3.4. Gaussian Mixture Implementation
3.4.1. Prediction Step
3.4.2. Update Step
3.5. The State Extraction and Group Structure Estimation
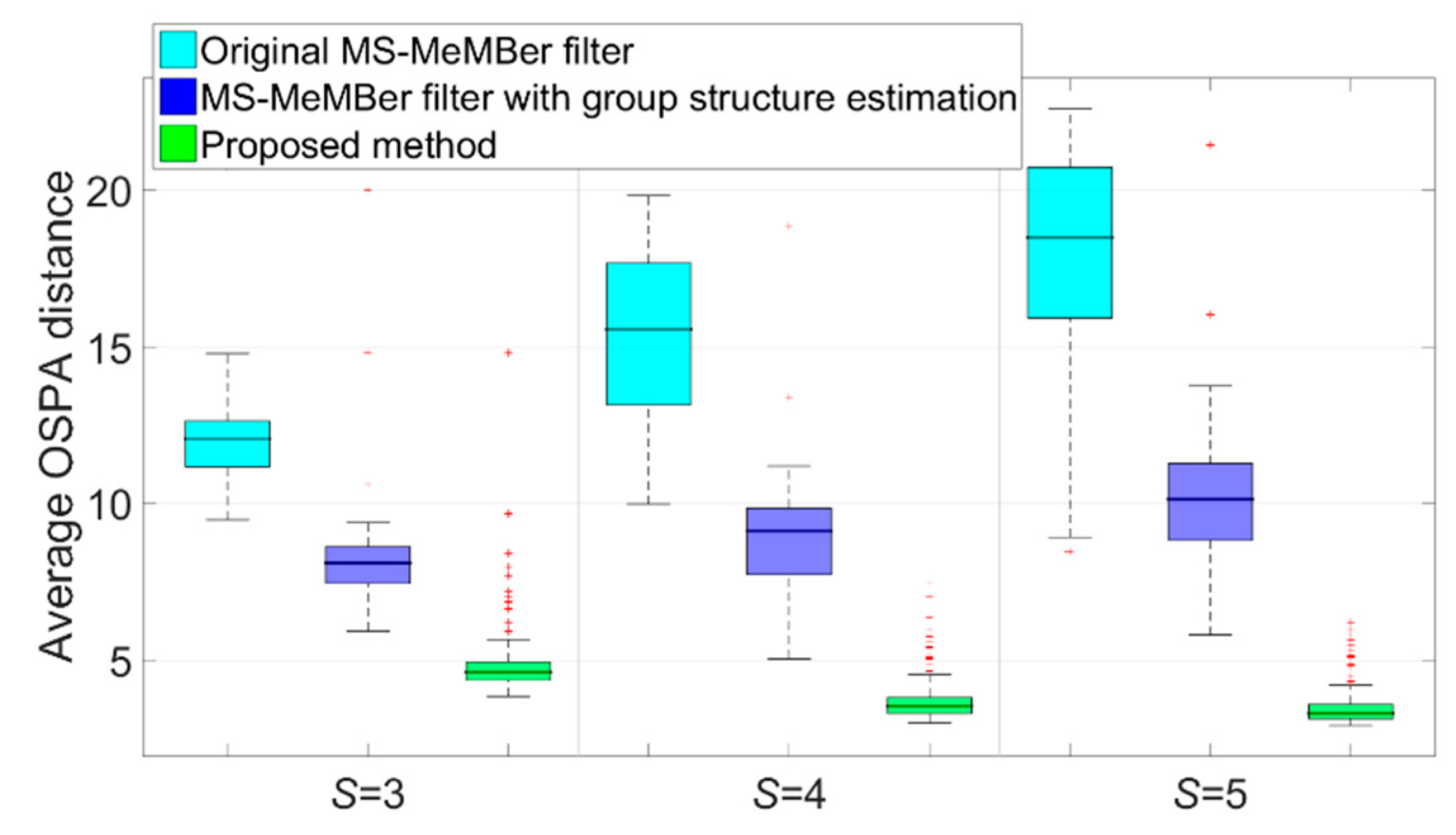
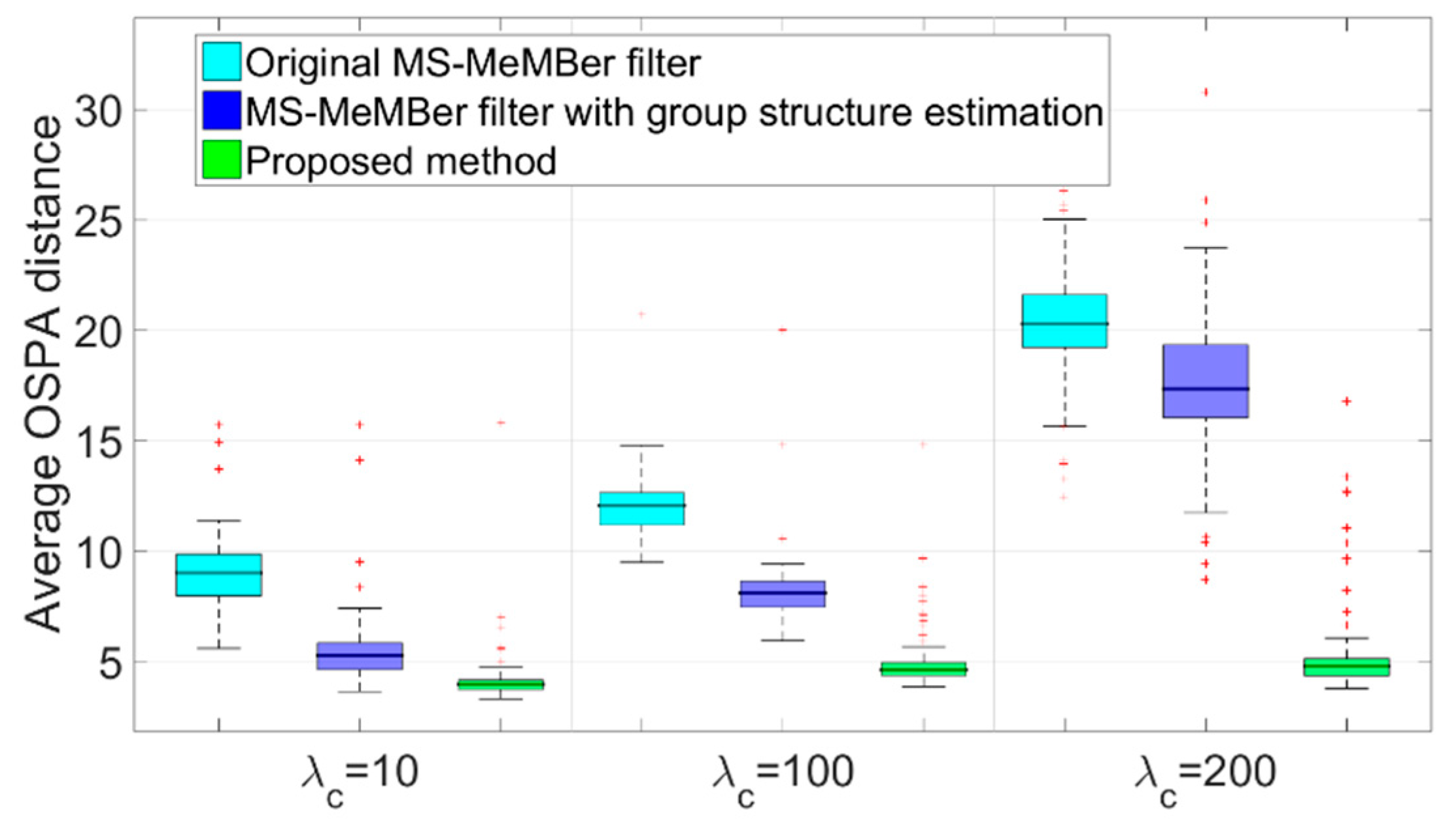
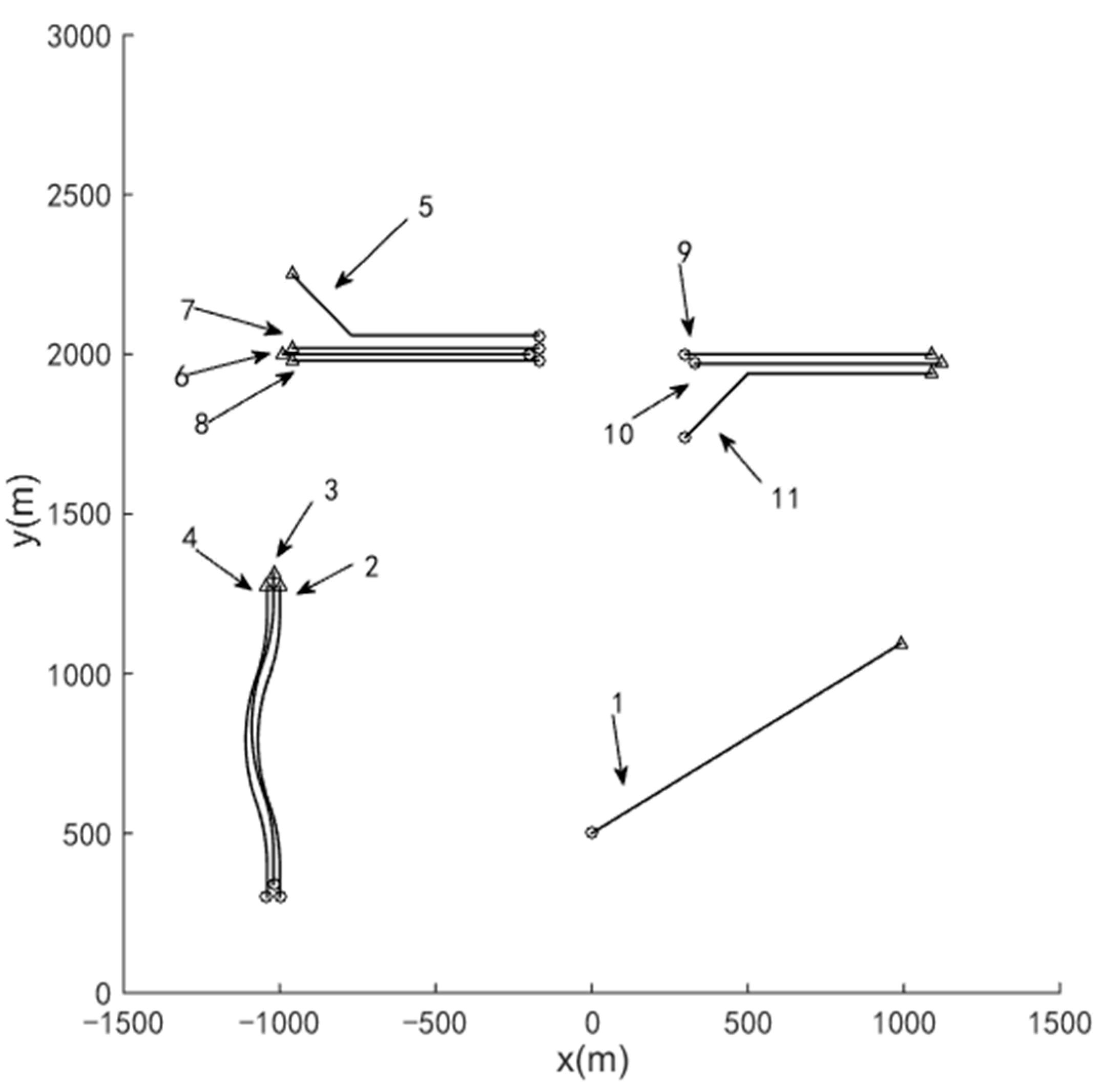
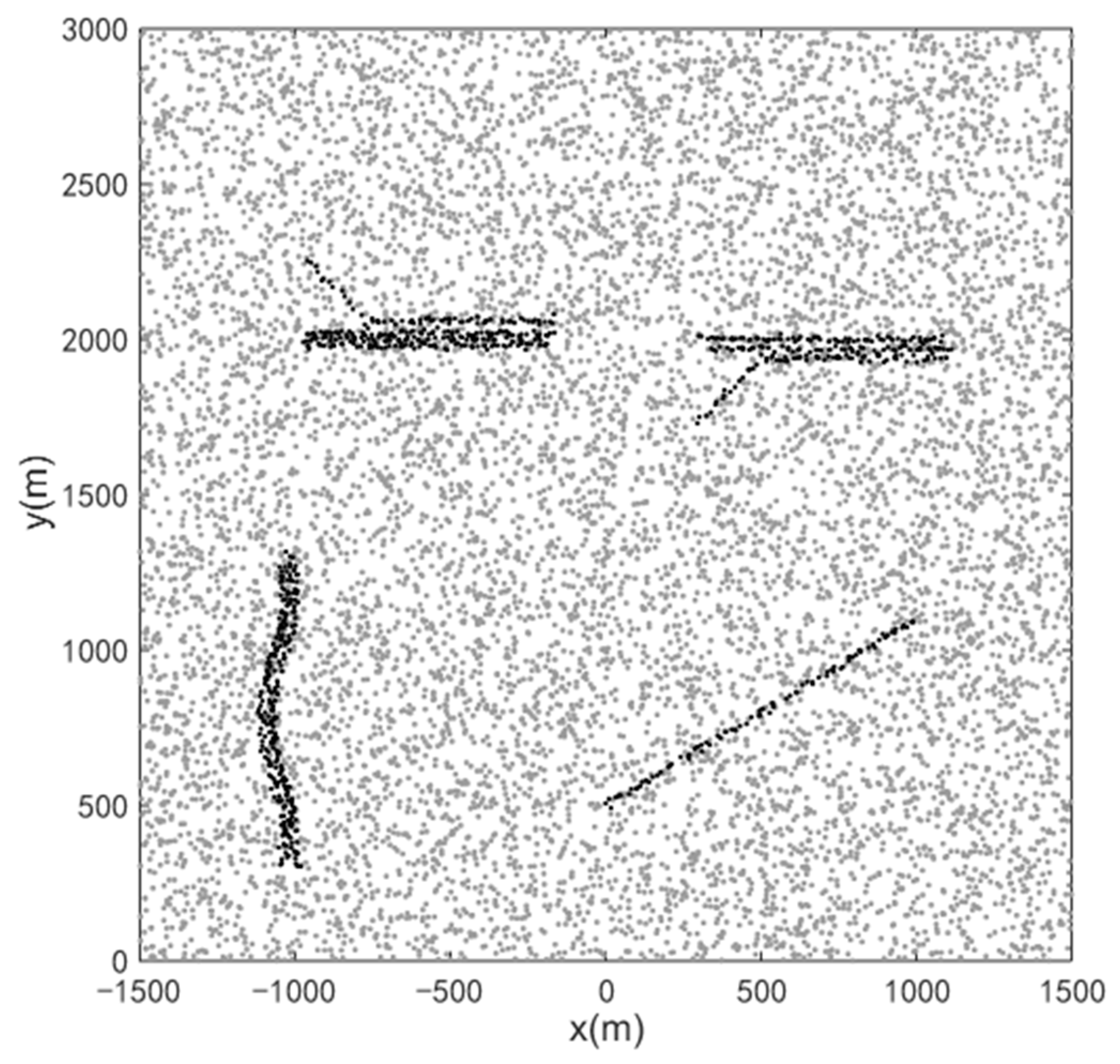
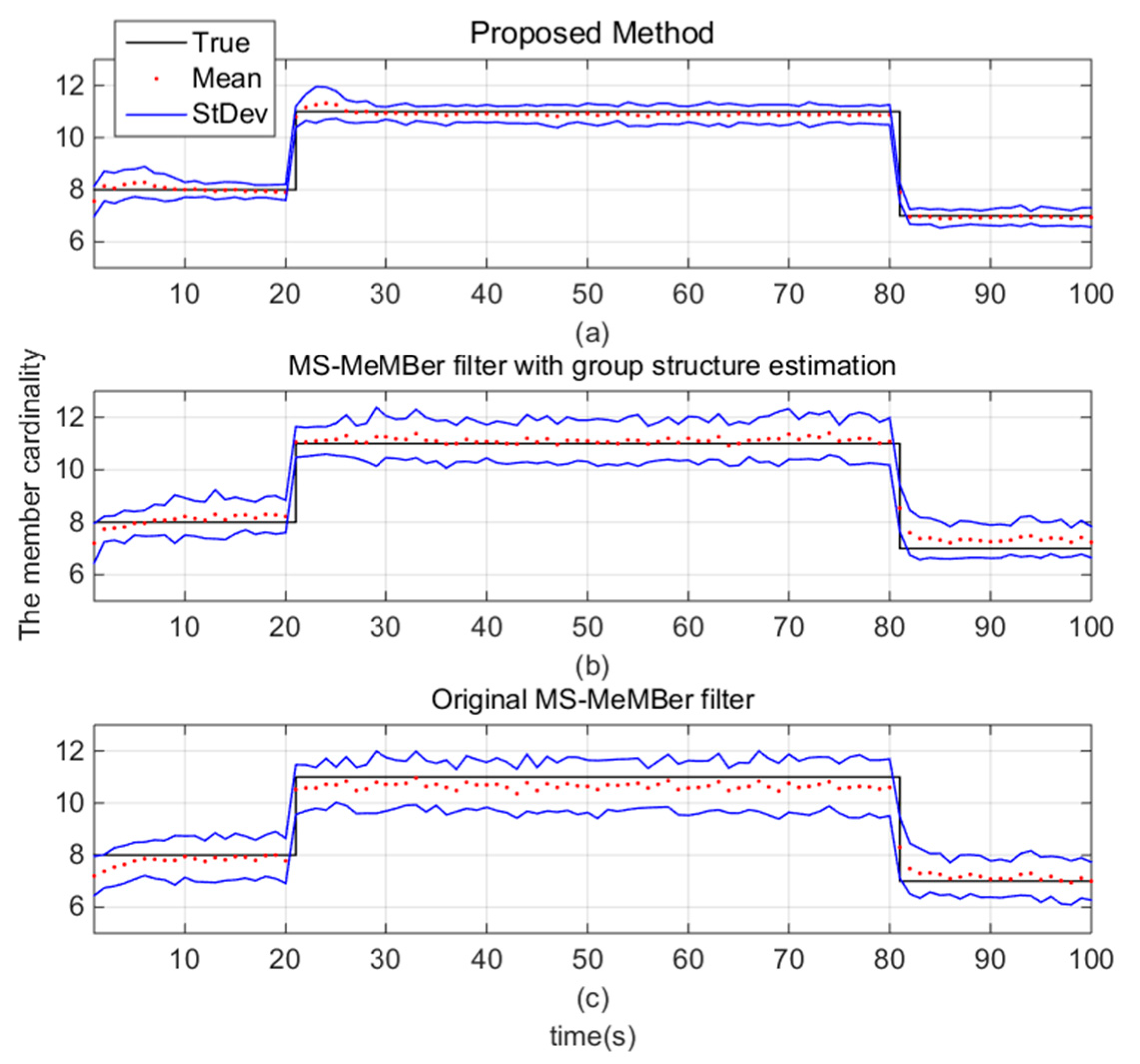
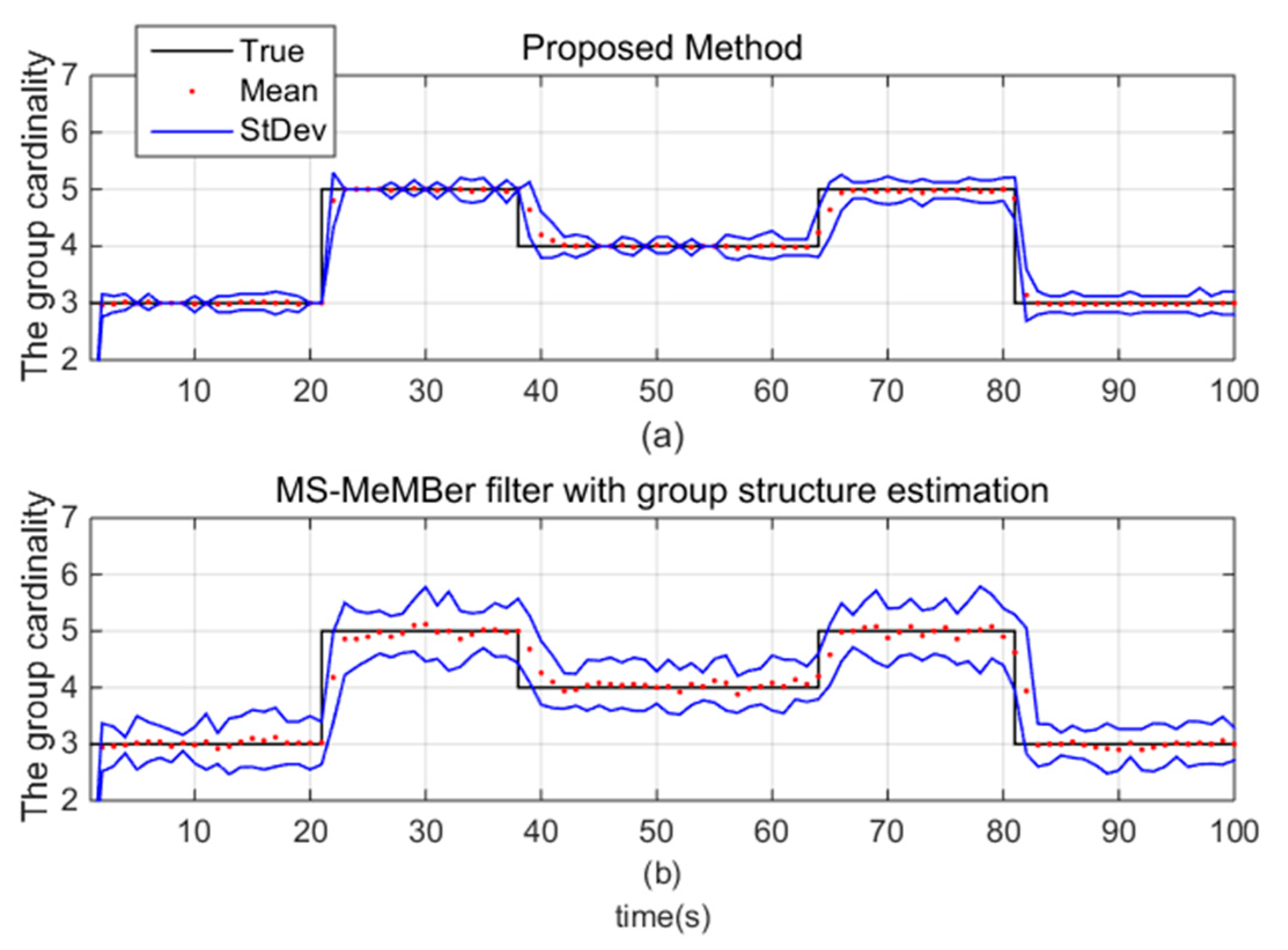
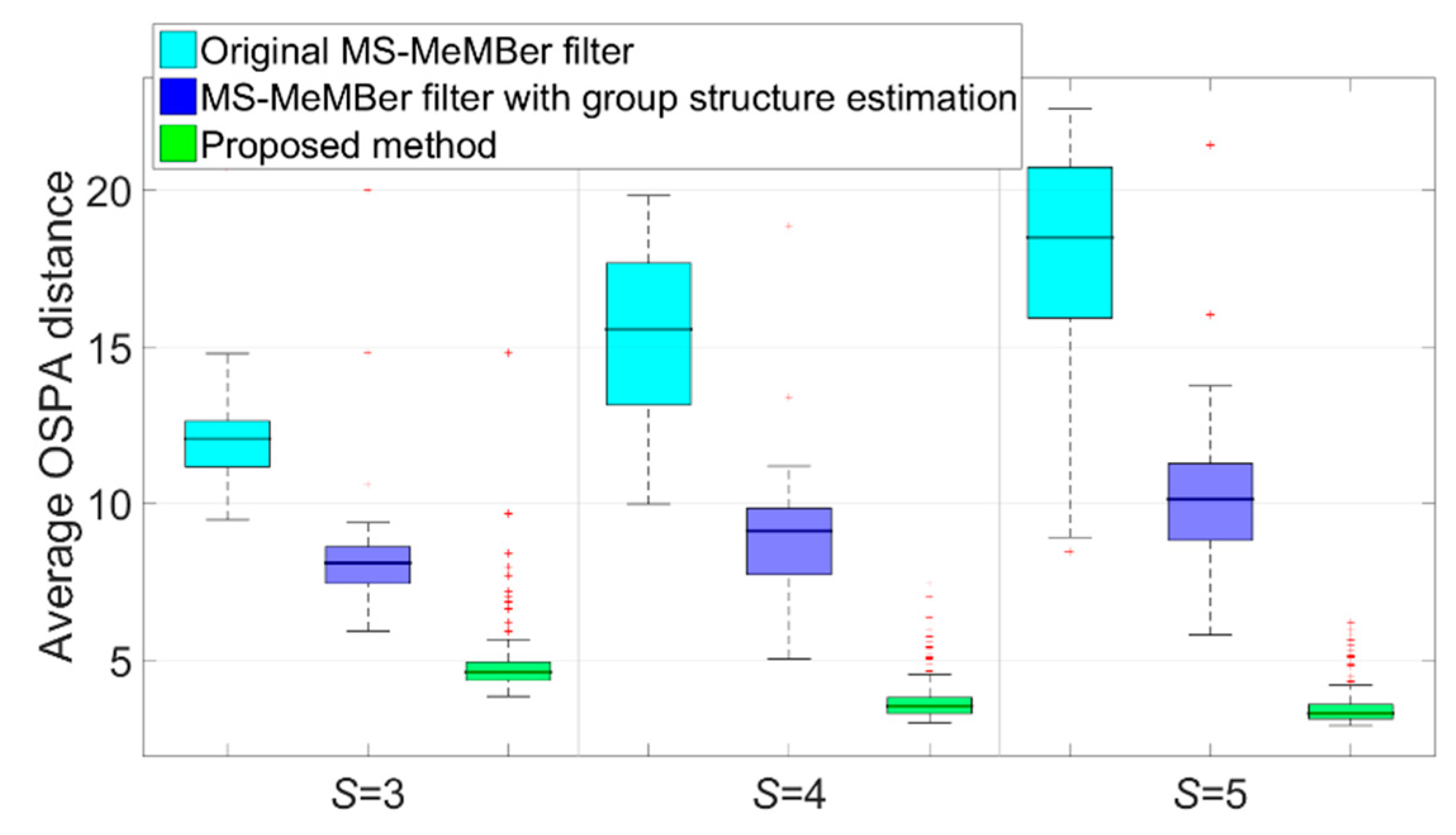
4. Simulation Results
5. Discussion
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Cheng, X.; Song, L.; Zou, Z. Multiple group target tracking with evolving networks and labeled box particle PHD filter. In Proceedings of the Chinese Control and Decision Conference, Shenyang, China, 9–11 June 2018; pp. 4046–4051. [Google Scholar]
- Zhang, Y.; Zhang, J.; Wang, S.; Li, Z. Research on Target tracking Based on Improved KCF Algorithm. In Proceedings of the IEEE International Conference on Power Electronics, Computer Applications, Shenyang, China, 22–24 January 2021; pp. 507–512. [Google Scholar]
- Peng, C.; Ye, W. An Improved Adaptive ET-PHD Algorithm for Newborn Target Intensity. In Proceedings of the IEEE 3rd Advanced Information Technology, Electronic and Automation Control Conference, Chongqing, China, 12–14 October 2018; pp. 2137–2142. [Google Scholar]
- Daniyan, A.; Lambotharan, S.; Deligiannis, A.; Gong, Y.; Chen, W. Bayesian Multiple Extended Target Tracking Using Labeled Random Finite Sets and Splines. IEEE Trans. Signal Process. 2018, 66, 6076–6091. [Google Scholar] [CrossRef] [Green Version]
- Xia, Y.; Granström, K.; Svensson, L.; García-Fernández, A.F.; Williams, J.L. Extended target Poisson multi-Bernoulli mixture trackers based on sets of trajectories. In Proceedings of the 22th International Conference on Information Fusion, Ottawa, ON, Canada, 2–5 July 2019; pp. 1–8. [Google Scholar]
- Li, Y.; Xiao, H.; Hao, W.; Qiang, F. Labeled particle unresolved target PHD filter for multiple group target tracking. In Proceedings of the IET International Radar Conference, Hangzhou, China, 14–16 October 2015; pp. 1–5. [Google Scholar]
- Pang, S.; Li, J.; Godsill, S. Models and Algorithms for Detection and Tracking of Coordinated Groups. In Proceedings of the IEEE Aerospace Conference, Big Sky, MT, USA, 1–8 March 2008; pp. 1–17. [Google Scholar]
- Khan, Z.; Balch, T.; Dellaert, F. MCMC-based particle filtering for tracking a variable number of interacting targets. IEEE Trans. Pattern Anal. 2005, 27, 1805–1819. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Gning, A.; Mihaylova, L.; Maskell, S.; Pang, S.; Godsill, S. Group Object Structure and State Estimation With Evolving Networks and Monte Carlo Methods. IEEE Trans. Signal Process. 2011, 59, 1383–1396. [Google Scholar] [CrossRef] [Green Version]
- Zou, Z.B.; Song, L.P.; Cheng, X. Labeled box-particle CPHD filter for multiple extended targets tracking. Syst. Eng. Electron. 2019, 30, 57–67. [Google Scholar]
- Granstrom, K.; Fatemi, M.; Svensson, L. Poisson Multi-Bernoulli Mixture Conjugate Prior for Multiple Extended Target Filtering. IEEE Trans. Aerosp. Electron. Syst. 2020, 56, 208–225. [Google Scholar] [CrossRef] [Green Version]
- Tuncer, B.; Özkan, E. Random Matrix Based Extended Target Tracking with Orientation: A New Model and Inference. IEEE Trans. Signal Process. 2021, 69, 1910–1923. [Google Scholar] [CrossRef]
- Magnant, C.; Kemkemian, S.; Zimmer, L. Joint tracking and classification for extended targets in maritime surveillance. In Proceedings of the IEEE Radar Conference, Oklahoma City, OK, USA, 23–27 April 2018; pp. 1117–1122. [Google Scholar]
- Li, Q.; Song, L. Axisymmetric extended target tracking using Gaussian process. In Proceedings of the IEEE 3rd International Conference on Information Communication and Signal Processing, Shanghai, China, 12–15 September 2020; pp. 306–311. [Google Scholar]
- Alqaderi, H.; Govaers, F.; Schulz, R. Spacial Elliptical Model for Extended Target Tracking Using Laser Measurements. In Proceedings of the Sensor Data Fusion: Trends, Solutions, Bonn, Germany, 15–17 October 2019; pp. 1–6. [Google Scholar]
- Baum, M.; Hanebeck, U. Random Hypersurface Models for extended object tracking. In Proceedings of the IEEE International Symposium on Signal Processing and Information, Ajman, United Arab Emirates, 14–17 December 2009; pp. 178–183. [Google Scholar]
- Baum, M.; Hanebeck, U. Shape tracking of extended objects and group targets with star-convex RHMs. In Proceedings of the 14th International Conference on Information Fusion, Chicago, IL, USA, 5–8 July 2011; pp. 1–8. [Google Scholar]
- Mahler, R. Statistical Multisource-Multitarget Information Fusion; Artech House, Inc.: Norwood, MA, USA, 2007. [Google Scholar]
- Wang, Z.; Han, B. A Multi-Target Detection and Tracking Technology Based on Labeled PHD Filtering. In Proceedings of the IEEE 5th Advanced Information Technology, Electronic and Automation Control Conference, Chongqing, China, 12–14 March 2021; pp. 766–775. [Google Scholar]
- Vo, B.T.; Vo, B.N.; Cantoni, A. On multi-Bernoulli approximations to the Bayes multi-target filter. In Proceedings of the IEEE International Symposium on Signal Processing and Information, Xi’an, China; 2007; pp. 1–8. [Google Scholar]
- Vo, B.N.; Vo, B.T.; Hoang, H. An Efficient Implementation of the Generalized Labeled Multi-Bernoulli Filter. IEEE Trans. Signal Process. 2017, 65, 1975–1987. [Google Scholar] [CrossRef] [Green Version]
- Clark, D.; Simon, G. Group Target Tracking with the Gaussian Mixture Probability Hypothesis Density Filter. In Proceedings of the 3rd International Conference on Intelligent Sensors, Sensor Networks and Information, Melbourne, VIC, Australia, 3–6 December 2007; pp. 149–154. [Google Scholar]
- Liu, W.; Zhu, S.; Wen, C. Structure modeling and estimation of multiple resolvable group targets via graph theory and multi-Bernoulli filter. Automatica 2018, 89, 274–289. [Google Scholar] [CrossRef]
- Zhu, S.; Liu, W.; Weng, C.; Cui, H. Multiple group targets tracking using the Generalized Labeled Multi-Bernoulli Filter. In Proceedings of the 35th Chinese Control Conference, Chengdu, China, 27–29 July 2016; pp. 4871–4876. [Google Scholar]
- Nannuru, S.; Blouin, S.; Coates, M.; Rabbat, M. Multisensor CPHD filter. IEEE Trans. Aerosp. Electron. Syst. 2016, 52, 1834–1854. [Google Scholar] [CrossRef] [Green Version]
- Saucan, A.; Coates, M.; Rabbat, M. Multisensor Multi-Bernoulli Filter. IEEE Trans. Signal Process. 2017, 65, 5495–5509. [Google Scholar] [CrossRef] [Green Version]
- Vo, B.N.; Vo, B.T.; Beard, M. Multi-Sensor Multi-Object Tracking with the Generalized Labeled Multi-Bernoulli Filter. IEEE Trans. Signal Process. 2019, 67, 5952–5967. [Google Scholar] [CrossRef] [Green Version]
- Martino, L.; Read, J.; Elvira, V.; Louzada, F. Cooperative Parallel Particle Filters for on-Line Model Selection and Applications to Urban Mobility. Digit. Signal Process. 2017, 60, 172–185. [Google Scholar] [CrossRef] [Green Version]
- Dan, C.; Miguez, J. Nested particle filters for online parameter estimation in discrete-time state-space Markov models. Bernoulli 2013, 24, 1–35. [Google Scholar]
- Carvalho, C.M.; Johannes, M.S.; Lopes, H.F.; Hedibert, F.; Polson, N. Particle Learning and Smoothing. Soc. Sci. Electron. 2010, 25, 88–106. [Google Scholar] [CrossRef] [Green Version]
- Deb, S.; Yeddanapudi, M.; Pattipati, K. A generalized S-D assignment algorithm for multisensor-multitarget state estimation. IEEE Trans. Aerosp. Electron. Syst. 1997, 33, 523–538. [Google Scholar]
- Dehghannasiri, R.; Esfahani, M.S.; Qian, X.; Dougherty, E.R. Optimal Bayesian Kalman Filtering with Prior Update. IEEE Trans. Signal Process. 2018, 66, 1982–1996. [Google Scholar] [CrossRef]
- García-Fernández, A.F.; Xia, Y.; Granström, K.; Svensson, L.; Williams, J.L. Gaussian implementation of the multi-Bernoulli mixture filter. In Proceedings of the 22th International Conference on Information Fusion, Ottawa, ON, Canada, 2–5 July 2019; pp. 1–8. [Google Scholar]
- Schuhmacher, D.; Vo, B.T.; Vo, B.N. A consistent metric for performance evaluation of multi-object filters. IEEE Trans. Signal Process. 2008, 56, 3447–3457. [Google Scholar] [CrossRef] [Green Version]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Target Number | Initial State | Survival Time |
|---|---|---|
| 1 | [0 m, 500 m, 10 m/s, 6 m/s] | (1 s–100 s) |
| 2 | [−1000 m, 300 m, 0 m/s, 10 m/s] | (1 s–100 s) |
| 3 | [−1040 m, 300 m, 0 m/s, 10 m/s] | (1 s–100 s) |
| 4 | [−1020 m, 340 m, 0 m/s, 10 m/s] | (1 s–100 s) |
| 5 | [−170 m, 2060 m, −10 m/s, 0 m/s] | (1 s–80 s) |
| 6 | [−200 m, 2000 m, −10 m/s, 0 m/s] | (1 s–80 s) |
| 7 | [−170 m, 2020 m, −10 m/s, 0 m/s] | (1 s–80 s) |
| 8 | [−170 m, 1080 m, −10 m/s, 0 m/s] | (1 s–80 s) |
| 9 | [300 m, 2000 m, 10 m/s, 0 m/s] | (21 s–100 s) |
| 10 | [330 m, 1070 m, 10 m/s, 0 m/s] | (21 s–100 s) |
| 11 | [300 m, 1740 m, 10 m/s, 10 m/s] | (21 s–100 s) |
| The Total Number of Sensors | Running Time of the Proposed Method | Running Time of the MS-MeMBer Filter |
|---|---|---|
| 3 | 4.55 s | 5.84 s |
| 4 | 9.36 s | 6.41 s |
| 5 | 27.08 s | 7.78 s |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, Z.; Sun, J.; Zhou, H.; Xu, C. Group Target Tracking Based on MS-MeMBer Filters. Remote Sens. 2021, 13, 1920. https://doi.org/10.3390/rs13101920
Zhang Z, Sun J, Zhou H, Xu C. Group Target Tracking Based on MS-MeMBer Filters. Remote Sensing. 2021; 13(10):1920. https://doi.org/10.3390/rs13101920
Chicago/Turabian StyleZhang, Zhiguo, Jinping Sun, Huiyu Zhou, and Congan Xu. 2021. "Group Target Tracking Based on MS-MeMBer Filters" Remote Sensing 13, no. 10: 1920. https://doi.org/10.3390/rs13101920
APA StyleZhang, Z., Sun, J., Zhou, H., & Xu, C. (2021). Group Target Tracking Based on MS-MeMBer Filters. Remote Sensing, 13(10), 1920. https://doi.org/10.3390/rs13101920