
Remote Sensing for Plant Water Content Monitoring: A Review

 ,
,  ,
,  ,
,
Abstract
:
1. Introduction
2. Sensors and Techniques
2.1. Radiometer
2.2. Spectrometer
2.3. Camera
2.4. Thermal Remote Sensors
2.5. Radar
2.5.1. Synthetic Aperture Radar
2.5.2. Frequency-Modulated Continuous-Wave Radar
2.6. Scatterometer
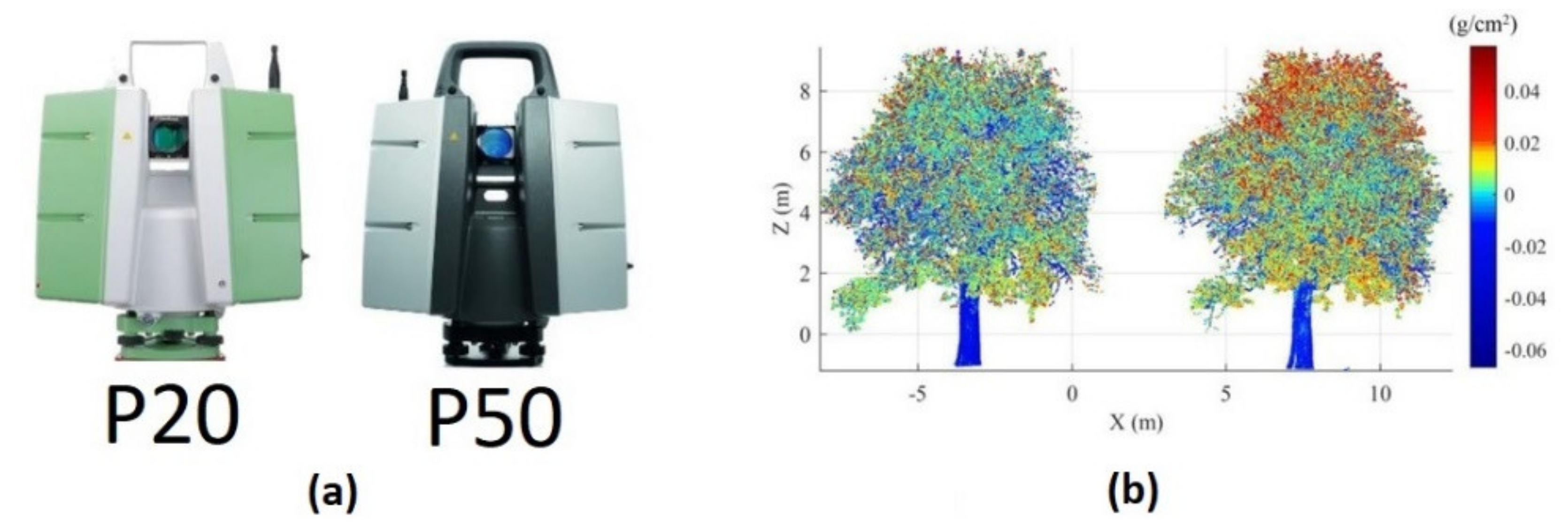
2.7. Terrestrial Laser
2.8. Soil Moisture Sensors
2.9. Sap-Flow Rate and Sap-Flux Density Gauges
2.10. Electromagnetic Spectroscopy
2.10.1. Terahertz Time-Domain Spectroscopy
2.10.2. Terahertz Continuous-Wave Spectroscopy
2.10.3. Terahertz Quasi Time-Domain Spectroscopy
2.10.4. Continuous-Wave Vector Network Analyzer Spectroscopy
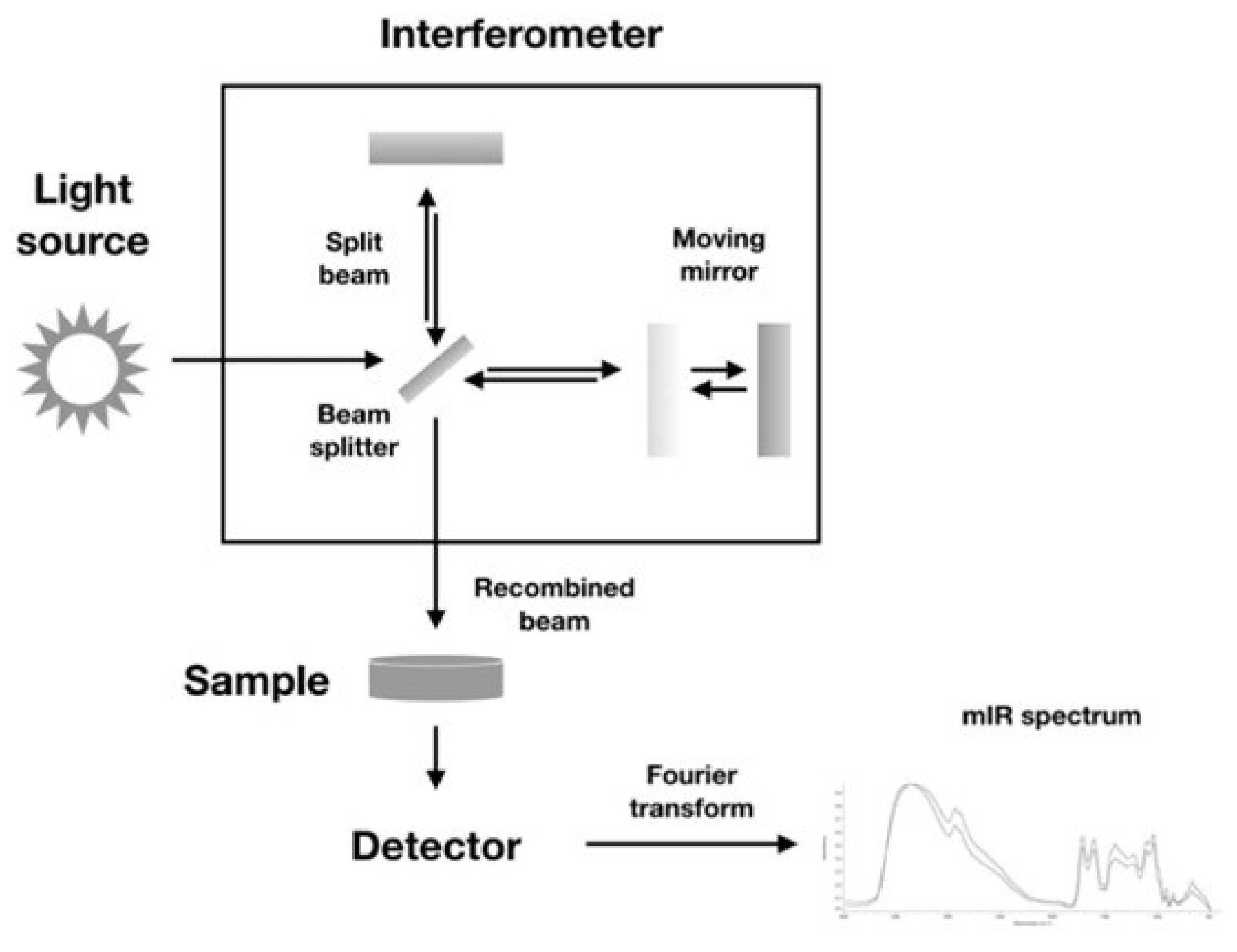
2.10.5. Fourier Transform Infrared Spectroscopy
2.11. Air-Coupled Broadband Ultrasonic Spectroscopy
2.12. Global Navigation Satellite System Reflectometry
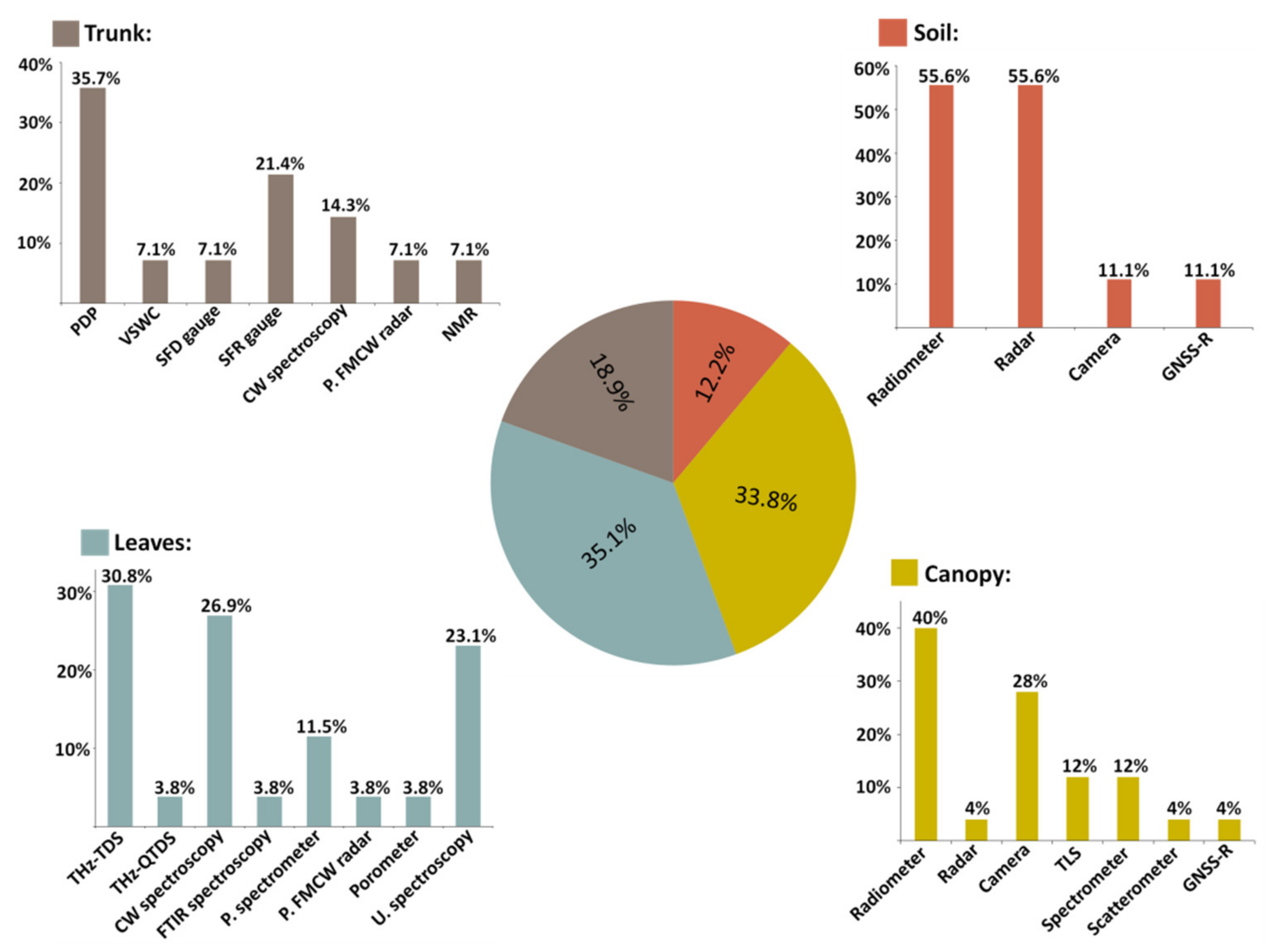
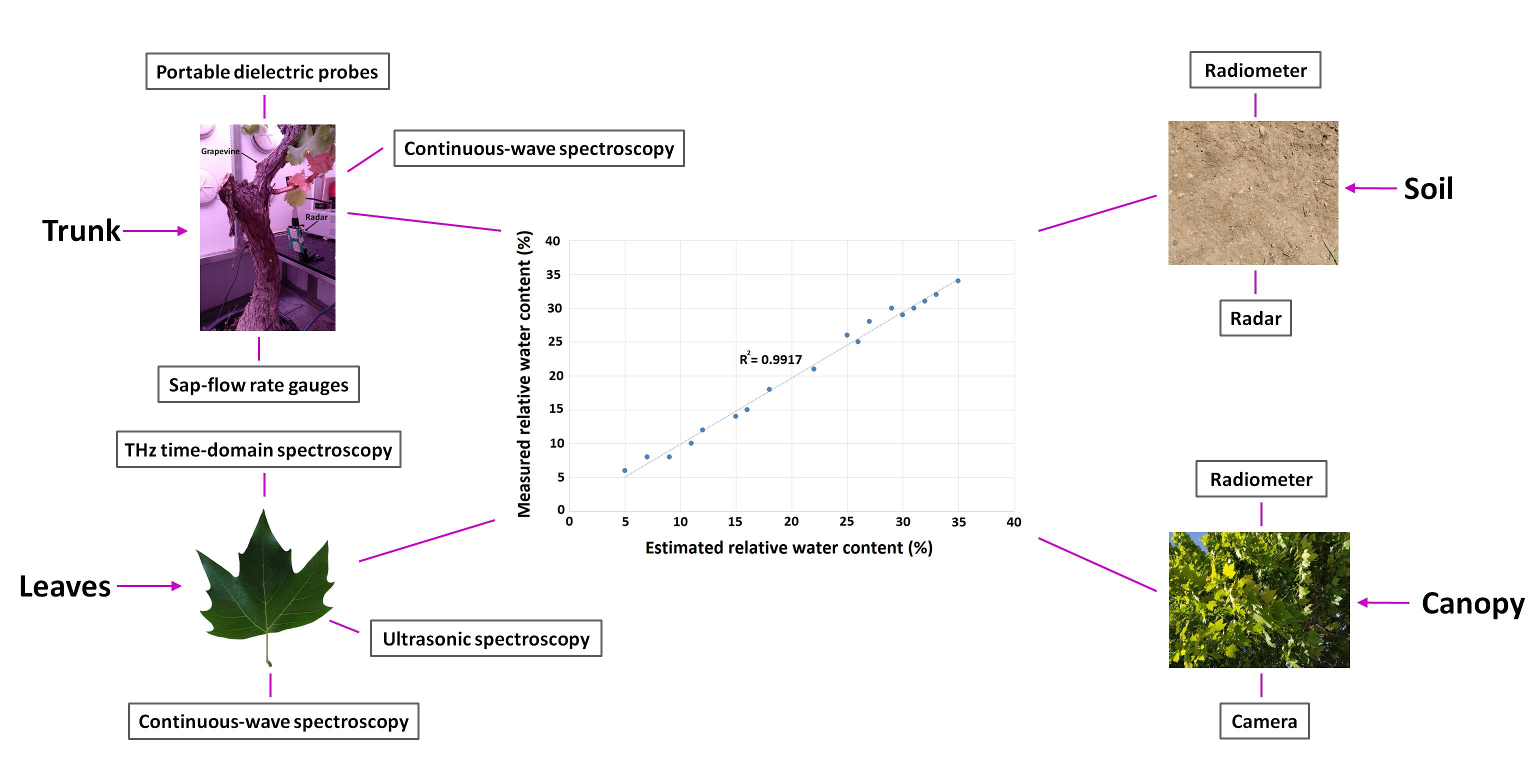
3. Different Approaches Based on Targets
3.1. Soil Techniques
3.2. Canopy Techniques
3.3. Techniques Applied to Leaves
3.4. Techniques Applied to the Trunk or Stems
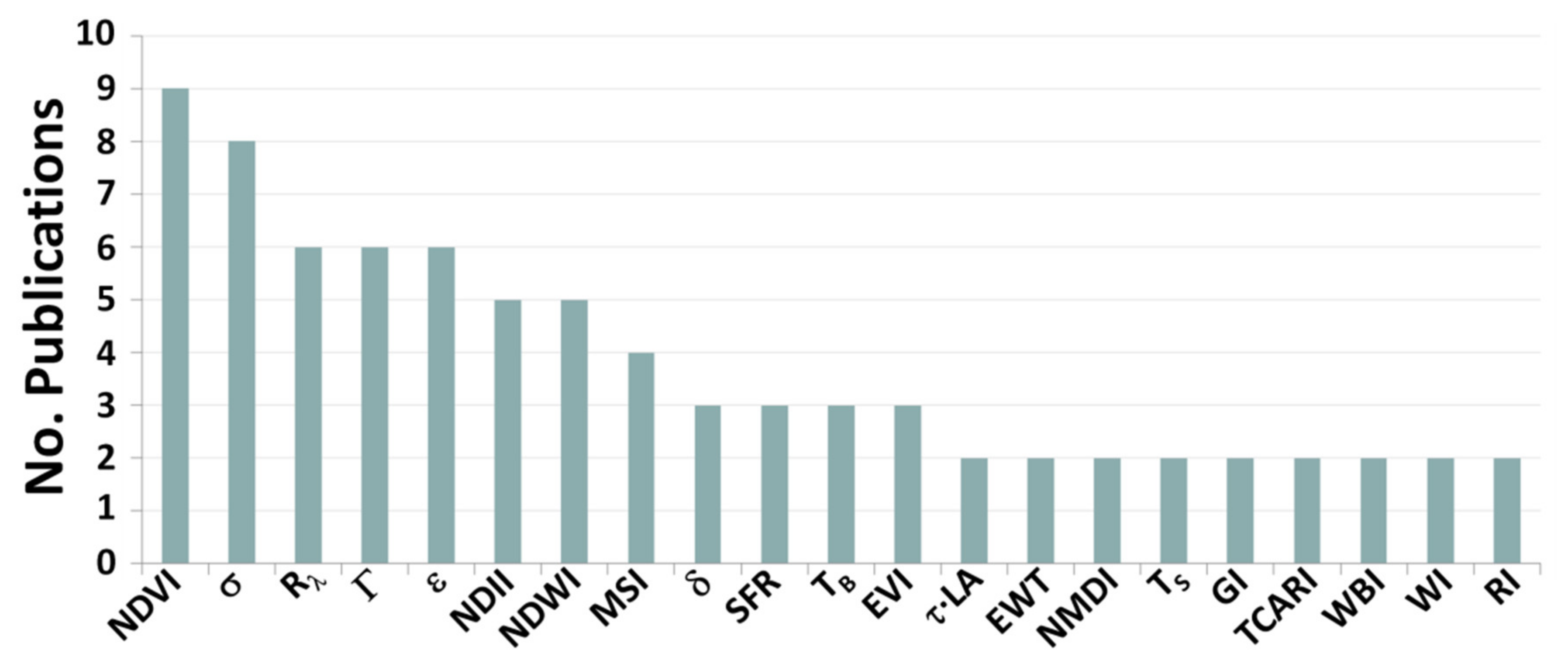
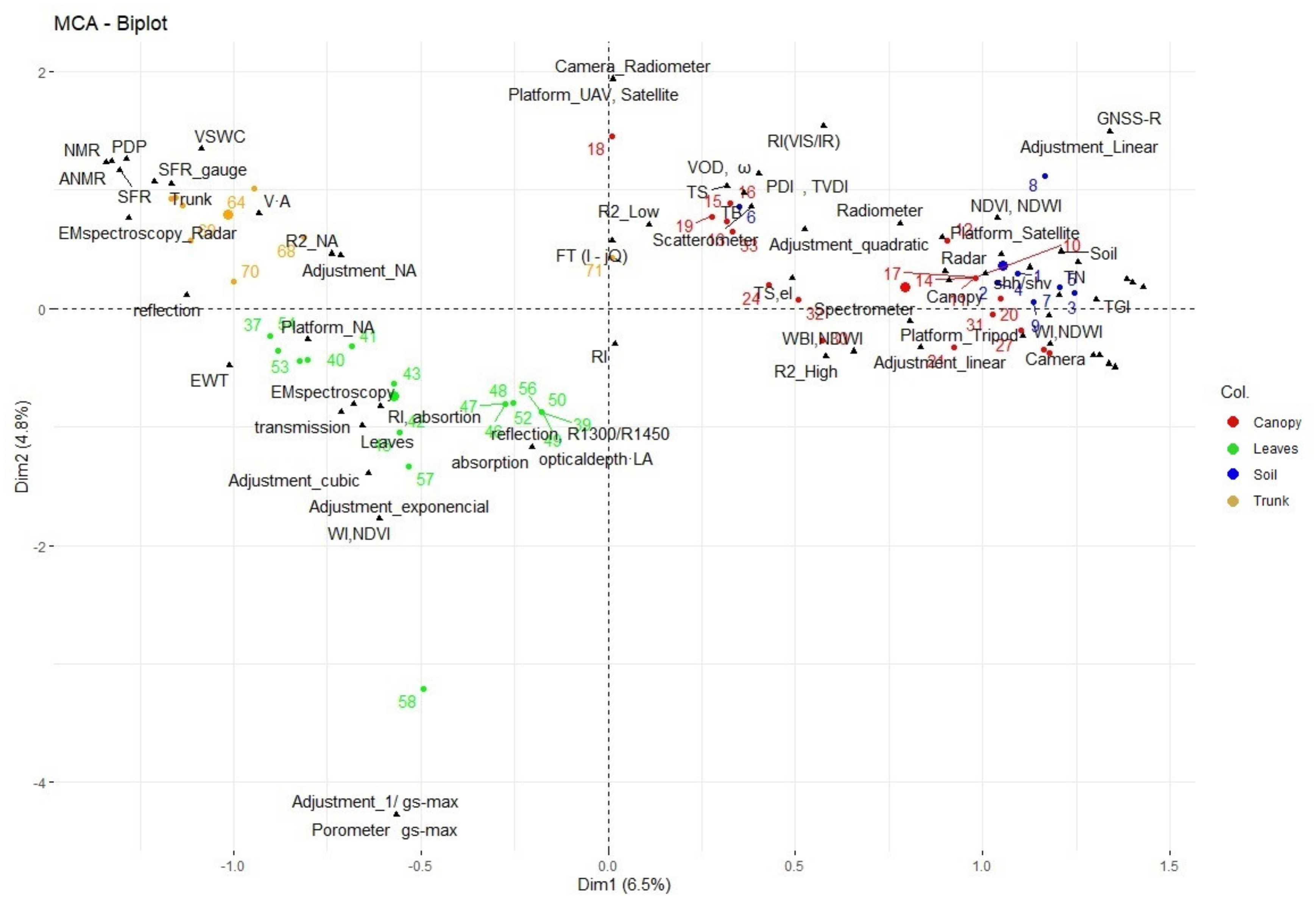
4. Comparison between Different Remote Sensing Approaches According Their Characteristics
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Steduto, P.; Hsiao, T.C.; Fereres, E.; Raes, D. Crop Yield Response to Water; FAO (Food and Agriculture Organization of the United Nations): Rome, Italy, 2012; pp. 1–500. [Google Scholar]
- Bowman, W.D. The relationship between leaf water status, gas exchange, and spectral reflectance in cotton leaves. Remote Sens. Environ. 1989, 30, 249–255. [Google Scholar] [CrossRef]
- Yamasaki, S.; Dillenburg, L. Measurements of leaf relative water content in Araucaria angustifolia. Rev. Bras. Fisiol. Veg. 1999, 11, 69–75. [Google Scholar]
- Chuvieco, E.; Riaño, D.; Aguado, I.; Cocero, D. Estimation of fuel moisture content from multitemporal analysis of Landsat Thematic Mapper reflectance data: Applications in fire danger assessment. Int. J. Remote Sens. 2002, 23, 2145–2162. [Google Scholar] [CrossRef]
- Steppe, K.; De Pauw, D.J.W.; Lemeur, R. A step towards new irrigation scheduling strategies using plant-based measurements and mathematical modelling. Irrig. Sci. 2008, 26, 505–517. [Google Scholar] [CrossRef]
- Siddique, Z.; Jan, S.; Imadi, S.; Gul, A.; Ahmad, P. Drought Stress and Photosynthesis in Plants; John Wiley & Sons: Hoboken, NJ, USA, 2016. [Google Scholar]
- Scholander, P.F.; Bradstreet, E.D.; Hemmingsen, E.A.; Hammel, H.T. Sap Pressure in Vascular Plants. Science 1965, 148, 339–346. [Google Scholar] [CrossRef] [PubMed]
- Jones, H.G. Monitoring plant and soil water status: Established and novel methods revisited and their relevance to studies of drought tolerance. J. Exp. Bot. 2007, 58, 119–130. [Google Scholar] [CrossRef] [Green Version]
- Macelloni, G.; Paloscia, S.; Pampaloni, P.; Santi, E.; Tedesco, M. Microwave radiometric measurements of soil moisture in Italy. Hydrol. Earth Syst. Sci. 2003, 7, 937–948. [Google Scholar] [CrossRef] [Green Version]
- Eweys, O.A.; Elwan, A.A.; Borham, T.I. Retrieving topsoil moisture using RADARSAT-2 data, a novel approach applied at the east of the Netherlands. J. Hydrol. 2017, 555, 670–682. [Google Scholar] [CrossRef]
- Fang, B.; Lakshmi, V.; Jackson, T.J.; Bindlish, R.; Colliander, A. Passive/active microwave soil moisture change disaggregation using SMAPVEX12 data. J. Hydrol. 2019, 574, 1085–1098. [Google Scholar] [CrossRef] [PubMed]
- Chatterjee, S.; Huang, J.; Hartemink, A.E. Establishing an Empirical Model for Surface Soil Moisture Retrieval at the U.S. Climate Reference Network Using Sentinel-1 Backscatter and Ancillary Data. Remote Sens. 2020, 12, 1242. [Google Scholar] [CrossRef] [Green Version]
- Huang, S.; Ding, J.; Liu, B.; Ge, X.; Wang, J.; Zou, J.; Zhang, J. The Capability of Integrating Optical and Microwave Data for Detecting Soil Moisture in an Oasis Region. Remote Sens. 2020, 12, 1358. [Google Scholar] [CrossRef]
- Wang, H.; He, N.; Zhao, R.; Ma, X. Soil water content monitoring using joint application of PDI and TVDI drought indices. Remote Sens. Lett. 2020, 11, 455–464. [Google Scholar] [CrossRef]
- Tao, L.; Wang, G.; Chen, W.; Chen, X.; Li, J.; Cai, Q. Soil Moisture Retrieval From SAR and Optical Data Using a Combined Model. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2019, 12, 637–647. [Google Scholar] [CrossRef]
- Munoz-Martin, J.F.; Onrubia, R.; Pascual, D.; Park, H.; Pablos, M.; Camps, A.; Rüdiger, C.; Walker, J.; Monerris, A. Single-Pass Soil Moisture Retrieval Using GNSS-R at L1 and L5 Bands: Results from Airborne Experiment. Remote Sens. 2021, 13, 797. [Google Scholar] [CrossRef]
- Putra, A.N.; Nita, I. Reliability of using high-resolution aerial photography (red, green and blue bands) for detecting available soil water in agricultural land. J. Degrad. Min. Lands Manag. 2020, 7, 2221–2232. [Google Scholar] [CrossRef] [Green Version]
- Hunt, E.R.; Li, L.; Yilmaz, M.T.; Jackson, T.J. Comparison of vegetation water contents derived from shortwave-infrared and passive-microwave sensors over central Iowa. Remote Sens. Environ. 2011, 115, 2376–2383. [Google Scholar] [CrossRef]
- Calvet, J.-C.; Wigneron, J.-P.; Mougin, E.; Kerr, Y.H.; Brito, J.L.S. Plant water content and temperature of the Amazon forest from satellite microwave radiometry. IEEE Trans. Geosci. Remote Sens. 1994, 32, 397–408. [Google Scholar] [CrossRef]
- Jackson, T.J.; Chen, D.; Cosh, M.; Li, F.; Anderson, M.; Walthall, C.; Doriaswamy, P.; Hunt, E.R. Vegetation water content mapping using Landsat data derived normalized difference water index for corn and soybeans. Remote Sens. Environ. 2004, 92, 475–482. [Google Scholar] [CrossRef]
- Varotsos, C.A.; Krapivin, V.F.; Mkrtchyan, F.A. A New Passive Microwave Tool for Operational Forest Fires Detection: A Case Study of Siberia in 2019. Remote Sens. 2020, 12, 835. [Google Scholar] [CrossRef] [Green Version]
- Chakraborty, A.; Seshasai, M.V.R.; Dadhwal, V.K. Assessing crop water stress during late kharif season using Normalized Diurnal Difference Vegetation Water Content (nddVWC) of Advanced Microwave Scanning Radiometer–Earth Observing System (AMSR-E). Nat. Hazards 2016, 84, 533–549. [Google Scholar] [CrossRef]
- Baur, M.J.; Jagdhuber, T.; Feldman, A.F.; Akbar, R.; Entekhabi, D. Estimation of relative canopy absorption and scattering at L-, C- and X-bands. Remote Sens. Environ. 2019, 233, 111384. [Google Scholar] [CrossRef]
- Pan, H.; Chen, Z.; Ren, J.; Li, H.; Wu, S. Modeling Winter Wheat Leaf Area Index and Canopy Water Content With Three Different Approaches Using Sentinel-2 Multispectral Instrument Data. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2019, 12, 482–492. [Google Scholar] [CrossRef]
- Xu, C.; Qu, J.J.; Hao, X.; Cosh, M.H.; Zhu, Z.; Gutenberg, L. Monitoring crop water content for corn and soybean fields through data fusion of MODIS and Landsat measurements in Iowa. Agric. Water Manag. 2020, 227, 105844. [Google Scholar] [CrossRef]
- Bhatti, S.; Heeren, D.M.; Barker, J.B.; Neale, C.M.U.; Woldt, W.E.; Maguire, M.S.; Rudnick, D.R. Site-specific irrigation management in a sub-humid climate using a spatial evapotranspiration model with satellite and airborne imagery. Agric. Water Manag. 2020, 230, 105950. [Google Scholar] [CrossRef] [Green Version]
- Pereira, R.; Casaroli, D.; Vellame, L.; Júnior, J.; Evangelista, A.; Battisti, R. Water deficit detection in sugarcane using canopy temperature from satellite images. Aust. J. Crop Sci. 2020, 14, 1835–2707. [Google Scholar] [CrossRef]
- Ma, J.; Huang, S.; Li, J.; Li, X.; Song, X.; Leng, P.; Sun, Y. Estimating vegetation water content of corn and soybean using different polarization ratios based on L- and S-band radar data. IEEE Geosci. Remote Sens. Lett. 2017, 14, 364–368. [Google Scholar] [CrossRef]
- Camps, A.; Alonso-Arroyo, A.; Park, H.; Onrubia, R.; Pascual, D.; Querol, J. L-Band Vegetation Optical Depth Estimation Using Transmitted GNSS Signals: Application to GNSS-Reflectometry and Positioning. Remote Sens. 2020, 12, 2352. [Google Scholar] [CrossRef]
- Caruso, G.; Zarco-Tejada, P.J.; González-Dugo, V.; Moriondo, M.; Tozzini, L.; Palai, G.; Rallo, G.; Hornero, A.; Primicerio, J.; Gucci, R. High-resolution imagery acquired from an unmanned platform to estimate biophysical and geometrical parameters of olive trees under different irrigation regimes. PLoS ONE 2019, 14, e0210804. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Chen, S.; Chen, Y.; Chen, J.; Zhang, Z.; Fu, Q.; Bian, J.; Cui, T.; Ma, Y. Retrieval of cotton plant water content by UAV-based vegetation supply water index (VSWI). Int. J. Remote Sens. 2020, 41, 4389–4407. [Google Scholar] [CrossRef]
- Bian, J.; Zhang, Z.; Chen, J.; Chen, H.; Cui, C.; Li, X.; Chen, S.; Fu, Q. Simplified Evaluation of Cotton Water Stress Using High Resolution Unmanned Aerial Vehicle Thermal Imagery. Remote Sens. 2019, 11, 267. [Google Scholar] [CrossRef] [Green Version]
- Huo, H.; Li, Z.-L.; Xing, Z. Temperature/emissivity separation using hyperspectral thermal infrared imagery and its potential for detecting the water content of plants. Int. J. Remote Sens. 2019, 40, 1672–1692. [Google Scholar] [CrossRef]
- Zhang, L.; Niu, Y.; Zhang, H.; Han, W.; Li, G.; Tang, J.; Peng, X. Maize Canopy Temperature Extracted From UAV Thermal and RGB Imagery and Its Application in Water Stress Monitoring. Front. Plant Sci. 2019, 10, 1270. [Google Scholar] [CrossRef]
- Quebrajo, L.; Perez-Ruiz, M.; Pérez-Urrestarazu, L.; Martínez, G.; Egea, G. Linking thermal imaging and soil remote sensing to enhance irrigation management of sugar beet. Biosyst. Eng. 2018, 165, 77–87. [Google Scholar] [CrossRef]
- Zhu, X.; Wang, T.; Skidmore, A.K.; Darvishzadeh, R.; Niemann, K.O.; Liu, J. Canopy leaf water content estimated using terrestrial LiDAR. Agric. For. Meteorol. 2017, 232, 152–162. [Google Scholar] [CrossRef]
- Elsherif, A.; Gaulton, R.; Mills, J. Four Dimensional Mapping of Vegetation Moisture Content Using Dual-Wavelength Terrestrial Laser Scanning. Remote Sens. 2019, 11, 2311. [Google Scholar] [CrossRef] [Green Version]
- Elsherif, A.; Gaulton, R.; Shenkin, A.; Malhi, Y.; Mills, J. Three dimensional mapping of forest canopy equivalent water thickness using dual-wavelength terrestrial laser scanning. Agric. For. Meteorol. 2019, 276–277, 107627. [Google Scholar] [CrossRef]
- Kycko, M.; Zagajewski, B.; Lavender, S.; Dabija, A. In Situ Hyperspectral Remote Sensing for Monitoring of Alpine Trampled and Recultivated Species. Remote Sens. 2019, 11, 1296. [Google Scholar] [CrossRef] [Green Version]
- Serrano, L.; Ustin, S.L.; Roberts, D.A.; Gamon, J.A.; Peñuelas, J. Deriving Water Content of Chaparral Vegetation from AVIRIS Data. Remote Sens. Environ. 2000, 74, 570–581. [Google Scholar] [CrossRef]
- Miller, D.L.; Alonzo, M.; Roberts, D.A.; Tague, C.L.; McFadden, J.P. Drought response of urban trees and turfgrass using airborne imaging spectroscopy. Remote Sens. Environ. 2020, 240, 111646. [Google Scholar] [CrossRef]
- Van Emmerik, T.; Steele-Dunne, S.; Paget, A.; Oliveira, R.S.; Bittencourt, P.R.L.; Barros, F.d.V.; van de Giesen, N. Water stress detection in the Amazon using radar. Geophys. Res. Lett. 2017, 44, 6841–6849. [Google Scholar] [CrossRef] [Green Version]
- Gente, R.; Born, N.; Voß, N.; Sannemann, W.; Léon, J.; Koch, M.; Castro-Camus, E. Determination of Leaf Water Content from Terahertz Time-Domain Spectroscopic Data. J. Infrared Millim. Terahertz Waves 2013, 34, 316–323. [Google Scholar] [CrossRef]
- Jördens, C.; Scheller, M.; Breitenstein, B.; Selmar, D.; Koch, M. Evaluation of leaf water status by means of permittivity at terahertz frequencies. J. Biol. Phys. 2009, 35, 255–264. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Singh, A.K.; Pérez-López, A.V.; Simpson, J.; Castro-Camus, E. Three-dimensional water mapping of succulent Agave victoriae-reginae leaves by terahertz imaging. Sci. Rep. 2020, 10, 1404. [Google Scholar] [CrossRef] [PubMed]
- Chuah, H.T.; Lee, K.Y.; Lau, T.W. Dielectric constants of rubber and oil palm leaf samples at X-band. IEEE Trans. Geosci. Remote Sens. 1995, 33, 221–223. [Google Scholar] [CrossRef]
- Zahid, A.; Abbas, H.T.; Ren, A.; Zoha, A.; Heidari, H.; Shah, S.A.; Imran, M.A.; Alomainy, A.; Abbasi, Q.H. Machine learning driven non-invasive approach of water content estimation in living plant leaves using terahertz waves. Plant Methods 2019, 15, 138. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Sancho-Knapik, D.; Gismero, J.; Asensio, A.; Peguero-Pina, J.J.; Fernández, V.; Álvarez-Arenas, T.G.; Gil-Pelegrín, E. Microwave l-band (1730MHz) accurately estimates the relative water content in poplar leaves. A comparison with a near infrared water index (R1300/R1450). Agric. For. Meteorol. 2011, 151, 827–832. [Google Scholar] [CrossRef]
- Fabre, S.; Lesaignoux, A.; Olioso, A.; Briottet, X. Influence of Water Content on Spectral Reflectance of Leaves in the 3–15-μm Domain. IEEE Geosci. Remote Sens. Lett. 2011, 8, 143–147. [Google Scholar] [CrossRef]
- Arevalo-Ramirez, T.; Villacrés, J.; Fuentes, A.; Reszka, P.; Auat Cheein, F.A. Moisture content estimation of Pinus radiata and Eucalyptus globulus from reconstructed leaf reflectance in the SWIR region. Biosyst. Eng. 2020, 193, 187–205. [Google Scholar] [CrossRef]
- Sancho-Knapik, D.; Gómez Álvarez-Arenas, T.; Peguero-Pina, J.J.; Gil-Pelegrín, E. Air-coupled broadband ultrasonic spectroscopy as a new non-invasive and non-contact method for the determination of leaf water status. J. Exp. Bot. 2010, 61, 1385–1391. [Google Scholar] [CrossRef] [Green Version]
- Sancho-Knapik, D.; Calas, H.; Peguero-Pina, J.J.; Ramos Fernandez, A.; Gil-Pelegrin, E.; Gomez Alvarez-Arenas, T.E. Air-coupled ultrasonic resonant spectroscopy for the study of the relationship between plant leaves’ elasticity and their water content. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2012, 59, 319–325. [Google Scholar] [CrossRef]
- Gómez Álvarez-Arenas, T.E.; Sancho-Knapik, D.; Peguero-Pina, J.J.; Pelegrín, E. Noncontact and noninvasive study of plant leaves using air-coupled ultrasounds. Appl. Phys. Lett. 2009, 95, 193702. [Google Scholar] [CrossRef] [Green Version]
- Sancho-Knapik, D.; Álvarez-Arenas, T.G.; Peguero-Pina, J.J.; Fernández, V.; Gil-Pelegrín, E. Relationship between ultrasonic properties and structural changes in the mesophyll during leaf dehydration. J. Exp. Bot. 2011, 62, 3637–3645. [Google Scholar] [CrossRef] [Green Version]
- Sancho-Knapik, D.; Peguero-Pina, J.J.; Medrano, H.; Fariñas, M.D.; Álvarez-Arenas, T.G.; Gil-Pelegrín, E. The reflectivity in the S-band and the broadband ultrasonic spectroscopy as new tools for the study of water relations in Vitis vinifera L. Physiol. Plant 2013, 148, 512–521. [Google Scholar] [CrossRef]
- Fariñas, M.D.; Jimenez-Carretero, D.; Sancho-Knapik, D.; Peguero-Pina, J.J.; Gil-Pelegrín, E.; Gómez Álvarez-Arenas, T. Instantaneous and non-destructive relative water content estimation from deep learning applied to resonant ultrasonic spectra of plant leaves. Plant Methods 2019, 15, 128. [Google Scholar] [CrossRef]
- Li, B.; Zhao, X.; Zhang, Y.; Zhang, S.; Luo, B. Prediction and monitoring of leaf water content in soybean plants using terahertz time-domain spectroscopy. Comput. Electron. Agric. 2020, 170, 105239. [Google Scholar] [CrossRef]
- Pagano, M.; Baldacci, L.; Ottomaniello, A.; de Dato, G.; Chianucci, F.; Masini, L.; Carelli, G.; Toncelli, A.; Storchi, P.; Tredicucci, A.; et al. THz Water Transmittance and Leaf Surface Area: An Effective Nondestructive Method for Determining Leaf Water Content. Sensors 2019, 19, 4838. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Baldacci, L.; Pagano, M.; Masini, L.; Toncelli, A.; Carelli, G.; Storchi, P.; Tredicucci, A. Non-invasive absolute measurement of leaf water content using terahertz quantum cascade lasers. Plant Methods 2017, 13, 51. [Google Scholar] [CrossRef]
- Castro-Camus, E.; Palomar, V.M.; Covarrubias, A. Leaf water dynamics of Arabidopsis thaliana monitored in-vivo using terahertz time-domain spectroscopy. Sci. Rep. 2013, 3, 1–5. [Google Scholar] [CrossRef] [Green Version]
- Gente, R.; Koch, M. Monitoring leaf water content with THz and sub-THz waves. Plant Methods 2015, 11, 1–9. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Born, N.; Behringer, D.; Liepelt, S.; Beyer, S.; Schwerdtfeger, M.; Ziegenhagen, B.; Koch, M. Monitoring Plant Drought Stress Response Using Terahertz Time-Domain Spectroscopy. Plant Physiol. 2014, 164, 1571–1577. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Gente, R.; Rehn, A.; Probst, T.; Stübling, E.-M.; Camus, E.C.; Covarrubias, A.A.; Balzer, J.C.; Koch, M. Outdoor Measurements of Leaf Water Content Using THz Quasi Time-Domain Spectroscopy. J. Infrared Millim. Terahertz Waves 2018, 39, 943–948. [Google Scholar] [CrossRef]
- Van Emmerik, T.; Steele-Dunne, S.C.; Judge, J.; Van De Giesen, N. Dielectric Response of Corn Leaves to Water Stress. IEEE Geosci. Remote Sens. Lett. 2017, 14, 8–12. [Google Scholar] [CrossRef]
- Afsharinejad, A.; Davy, A.; Naftaly, M. Variability of terahertz transmission measured in live plant leaves. IEEE Geosci. Remote Sens. Lett. 2017, 14, 636–638. [Google Scholar] [CrossRef]
- Gente, R.; Rehn, A.; Koch, M. Contactless water status measurements on plants at 35 GHz. J. Infrared Millim. Terahertz Waves 2015, 36, 312–317. [Google Scholar] [CrossRef]
- Ribera-Fonseca, A.; Jorquera-Fontena, E.; Castro, M.; Acevedo, P.; Parra, J.C.; Reyes-Diaz, M. Exploring VIS/NIR reflectance indices for the estimation of water status in highbush blueberry plants grown under full and deficit irrigation. Sci. Hortic. 2019, 256, 108557. [Google Scholar] [CrossRef]
- Litvischenko, V.L.; Nikiforov, I.Y.; Ershov, I.V. Remote measurement of sunflower seed moisture content by the use of microwaves. J. Sci. Food Agric. 2017, 97, 4880–4882. [Google Scholar] [CrossRef] [PubMed]
- Vilagrosa, A.; Bellot, J.; Vallejo, V.R.; Gil-Pelegrín, E. Cavitation, stomatal conductance, and leaf dieback in seedlings of two co-occurring Mediterranean shrubs during an intense drought. J. Exp. Bot. 2003, 54, 2015–2024. [Google Scholar] [CrossRef] [PubMed]
- Medrano, H.; Escalona, J.M.; Bota, J.; Gulías, J.; Flexas, J. Regulation of Photosynthesis of C3 Plants in Response to Progressive Drought: Stomatal Conductance as a Reference Parameter. Ann. Bot. 2002, 89, 895–905. [Google Scholar] [CrossRef]
- Mcdonald, K.; Zimmermann, R.; Kimball, J. Diurnal and spatial variation of xylem dielectric constant in Norway Spruce (Picea abies [L.] Karst.) as related to microclimate, xylem sap flow, and xylem chemistry. IEEE Trans. Geosci. Remote Sens. 2002, 40, 2063–2082. [Google Scholar] [CrossRef]
- McDonald, K.C.; Zimmerman, R.; Way, J. An Investigation Of The Relationship Between Tree Water Potential And Dielectric Constant. In Proceedings of the IGARSS ’92 International Geoscience and Remote Sensing Symposium, Houston, TX, USA, 26–29 May 1992; NTRS-NASA: Washington, DC, USA, 1992; Volume 1, pp. 523–525. [Google Scholar]
- Mcdonald, K.; Zimmermann, R.; Way, J.; Chun, W. Automated instrumentation for continuous monitoring of the dielectric properties of woody vegetation: System design, implementation, and selected in situ measurements. IEEE Trans. Geosci. Remote Sens. 1999, 37, 1880–1894. [Google Scholar] [CrossRef] [Green Version]
- Zimmermann, R.; McDonald, K.; Oren, R.; Way, J. Xylem dielectric constant, water status, and transpiration of young Jack Pine (Pinus banksiana Lamb.) in the southern boreal zone of Canada. In Proceedings of the 1995 International Geoscience and Remote Sensing Symposium, IGARSS ’95, Quantitative Remote Sensing for Science and Applications, Firenze, Italy, 10–14 July 1995; IEEE: Piscataway, NJ, USA, 1995; Volume 2, pp. 1006–1008. [Google Scholar]
- Franchois, A.; Pineiro, Y.; Lang, R.H. Microwave permittivity measurements of two conifers. IEEE Trans. Geosci. Remote Sens. 1998, 36, 1384–1395. [Google Scholar] [CrossRef]
- Stott, L.V.; Black, B.; Bugbee, B. Quantifying Tree Hydration Using Electromagnetic Sensors. Horticulturae 2020, 6, 2. [Google Scholar] [CrossRef] [Green Version]
- Vandegehuchte, M.W.; Steppe, K. Sap-flux density measurement methods: Working principles and applicability. Funct. Plant Biol. 2013, 40, 213–223. [Google Scholar] [CrossRef]
- Sakuratani, T. A Heat Balance Method for Measuring Water Flux in the Stem of Intact Plants. J. Agric. Meteorol. 1981, 37, 9–17. [Google Scholar] [CrossRef]
- Dugas, W.A. Comparative measurement of stem flow and transpiration in cotton. Theor. Appl. Climatol. 1990, 42, 215–221. [Google Scholar] [CrossRef]
- Nakano, Y.; Iwasaki, N. Determination of phloem sap flow rate using a combination of the heat balance method and girdling in citrus. Agric. For. Meteorol. 2019, 278, 107669. [Google Scholar] [CrossRef]
- Miner, G.L.; Ham, J.M.; Kluitenberg, G.J. A heat-pulse method for measuring sap flow in corn and sunflower using 3D-printed sensor bodies and low-cost electronics. Agric. For. Meteorol. 2017, 246, 86–97. [Google Scholar] [CrossRef]
- Torres, V.; Palacios, I.; Iriarte, J.C.; Liberal, I.; Santesteban, L.G.; Miranda, C.; Royo, J.B.; Gonzalo, R. Monitoring water status of grapevine by means of THz waves. J. Infrared Millim. Terahertz Waves 2016, 37, 507–513. [Google Scholar] [CrossRef]
- Santesteban, L.G.; Palacios, I.; Miranda, C.; Iriarte, J.C.; Royo, J.B.; Gonzalo, R. Terahertz time domain spectroscopy allows contactless monitoring of grapevine water status. Front. Plant Sci. 2015, 6, 1–9. [Google Scholar] [CrossRef] [Green Version]
- Quemada, C.; García González, C.; Galarregui, J.C.I.; Marín, D.; Gastón, D.; Miranda, C.; Gonzalo, R.; Maestrojuán, I.; Santesteban, L.G.; Ederra, I. Water Content Continuous Monitoring of Grapevine Xylem Tissue Using a Portable Low-Power Cost-Effective FMCW Radar. IEEE Trans. Geosci. Remote Sens. 2019, 57, 5595–5605. [Google Scholar] [CrossRef] [Green Version]
- Windt, C.W.; Blümler, P. A portable NMR sensor to measure dynamic changes in the amount of water in living stems or fruit and its potential to measure sap flow. Tree Physiol. 2015, 35, 366–375. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Chang, N.-B.; Bai, K. Multisensor Data Fusion and Machine Learning for Environmental Remote Sensing; CRC Press: Boca Raton, FL, USA, 2018. [Google Scholar]
- Le Vine, D.; Skou, N. Microwave Radiometer Systems: Design and Analysis, 2nd ed.; Artech: Nordwood, MA, USA, 2006. [Google Scholar]
- Schaepman, M.E. The SAGE Handbook of Remote Sensing; SAGE Publications, Inc.: London, UK, 2009. [Google Scholar]
- Going Hyperspectral. Available online: https://www.esa.int/Applications/Observing_the_Earth/Proba-1/Going_hyperspectral (accessed on 21 January 2021).
- Rasti, B.; Scheunders, P.; Ghamisi, P.; Licciardi, G.; Chanussot, J. Noise Reduction in Hyperspectral Imagery: Overview and Application. Remote Sens. 2018, 10, 482. [Google Scholar] [CrossRef] [Green Version]
- Sellar, R.G.; Boreman, G.D. Classification of imaging spectrometers for remote sensing applications. Opt. Eng. 2005, 44, 1–3. [Google Scholar] [CrossRef] [Green Version]
- Hagen, N.A.; Kudenov, M.W. Review of snapshot spectral imaging technologies. Opt. Eng. 2013, 52, 1–23. [Google Scholar] [CrossRef] [Green Version]
- Crocombe, R.A. Portable Spectroscopy. Appl. Spectrosc. 2018, 72, 1701–1751. [Google Scholar] [CrossRef]
- Aasen, H.; Honkavaara, E.; Lucieer, A.; Zarco-Tejada, P.J. Quantitative Remote Sensing at Ultra-High Resolution with UAV Spectroscopy: A Review of Sensor Technology, Measurement Procedures, and Data Correction Workflows. Remote Sens. 2018, 10, 1091. [Google Scholar] [CrossRef] [Green Version]
- Piper, J.; Pelc, R. Consumer Versus Dedicated Digital Cameras in Photomicrography. In Neurohistology and Imaging Techniques; Springer: Berlin/Heidelberg, Germany, 2020; pp. 379–401. [Google Scholar]
- Huang, S.; Ding, J.; Zou, J.; Liu, B.; Zhang, J.; Chen, W. Soil Moisture Retrival Based on Sentinel-1 Imagery under Sparse Vegetation Coverage. Sensors 2019, 19, 589. [Google Scholar] [CrossRef] [Green Version]
- Chuvieco, E. Fundamentals of Satellite Remote Sensing: An Environmental Approach, 2nd ed.; CRC Press: Boca Raton, FL, USA, 2016. [Google Scholar]
- Frison, P.-L.; Jarlan, L.; Mougin, E. 3—Using Satellite Scatterometers to Monitor Continental Surfaces. In Land Surface Remote Sensing in Continental Hydrology; Baghdadi, N., Zribi, M., Eds.; Elsevier: Amsterdam, The Netherlands, 2016; pp. 79–113. [Google Scholar]
- Lemmens, M. Terrestrial Laser Scanning. In Geo-Information: Technologies, Applications and the Environment; Springer: Dordrecht, The Netherlands, 2011; pp. 101–121. [Google Scholar]
- Thompson, R.; Voogt, W. EIP-AGRI Focus Group Fertiliser efficiency in horticulture—Mini-paper: Irrigation management using soil moisture sensors. In Focus Group Fertiliser Efficiency in Horticulture; EIP-AGRI Agriculture and Innovation: Bruxelles, Belguim, 2014. [Google Scholar]
- Dwevedi, A.; Kumar, P.; Kumar, P.; Kumar, Y.; Sharma, Y.K.; Kayastha, A.M. 15—Soil sensors: Detailed insight into research updates, significance, and future prospects. In New Pesticides and Soil Sensors; Grumezescu, A.M., Ed.; Academic Press: Cambridge, MA, USA, 2017; pp. 561–594. [Google Scholar]
- González-Teruel, J.D.; Torres-Sánchez, R.; Blaya-Ros, P.J.; Toledo-Moreo, A.B.; Jiménez-Buendía, M.; Soto-Valles, F. Design and Calibration of a Low-Cost SDI-12 Soil Moisture Sensor. Sensors 2019, 19, 491. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Muñoz-Carpena, R. Field Devices For Monitoring Soil Water Content. Bull. Inst. Food Agric. Sci. Univ. Fla. 2004, 343. [Google Scholar] [CrossRef]
- Soil Moisture Sensing Controller and Optimal Estimator (SoilSCAPE). Available online: https://soilscape.usc.edu/bootstrap/index.html (accessed on 18 February 2021).
- Smith, D.M.; Allen, S.J. Measurement of sap flow in plant stems. J. Exp. Bot. 1996, 47, 1833–1844. [Google Scholar] [CrossRef] [Green Version]
- Coutaz, J.-L.; Shkurinov, A.P. Chapter 4—Terahertz time-domain spectroscopy: Advanced techniques. In Molecular and Laser Spectroscopy; Gupta, V.P., Ozaki, Y., Eds.; Elsevier: Amsterdam, The Netherlands, 2020; pp. 121–166. [Google Scholar]
- Lee, Y.-S. Principles of Terahertz Science and Technology; Springer: Berlin/Heidelberg, Germany, 2009. [Google Scholar]
- Basalekou, M.; Pappas, C.; Tarantilis, P.A.; Kallithraka, S. Wine Authenticity and Traceability with the Use of FT-IR. Beverages 2020, 6, 30. [Google Scholar] [CrossRef]
- Gómez Álvarez-Arenas, T.; Gil-Pelegrin, E.; Ealo Cuello, J.; Fariñas, M.D.; Sancho-Knapik, D.; Collazos Burbano, D.A.; Peguero-Pina, J.J. Ultrasonic Sensing of Plant Water Needs for Agriculture. Sensors 2016, 16, 89. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Yin, C.; Lopez-Baeza, E.; Martin-Neira, M.; Fernandez-Moran, R.; Yang, L.; Navarro-Camba, E.A.; Egido, A.; Mollfulleda, A.; Li, W.; Cao, Y.; et al. Intercomparison of Soil Moisture Retrieved from GNSS-R and from Passive L-Band Radiometry at the Valencia Anchor Station. Sensors 2019, 19, 1900. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Calabia, A.; Molina, I.; Jin, S. Soil Moisture Content from GNSS Reflectometry Using Dielectric Permittivity from Fresnel Reflection Coefficients. Remote Sens. 2020, 12, 122. [Google Scholar] [CrossRef] [Green Version]
- Looyenga, H. Dielectric constants of heterogeneous mixtures. Physica 1965, 31, 401–406. [Google Scholar] [CrossRef]
- Ulaby, F.T.; El-Rayes, M.A. Microwave Dielectric Spectrum of Vegetation—Part II: Dual-Dispersion Model. IEEE Trans. Geosci. Remote Sens. 1987, GE-25, 550–557. [Google Scholar] [CrossRef]
- Torii, T.; Okamoto, T.; Kitani, O. Non-destructive measurement of water content of a plant using ultrasonic technique. In Proceedings of the Acta Horticulturae, Hamamatsu, Japan, 12–15 May 1988; International Society for Horticultural Science (ISHS): Leuven, Belgium, 1988; pp. 389–396. [Google Scholar]
- Yu, R.; Kurtural, S.K. Proximal Sensing of Soil Electrical Conductivity Provides a Link to Soil-Plant Water Relationships and Supports the Identification of Plant Water Status Zones in Vineyards. Front. Plant Sci. 2020, 11, 244. [Google Scholar] [CrossRef] [Green Version]
- Brillante, L.; Martínez-Lüscher, J.; Yu, R.; Kurtural, S.K. Carbon Isotope Discrimination (δ13 C) of Grape Musts Is a Reliable Tool for Zoning and the Physiological Ground-Truthing of Sensor Maps in Precision Viticulture. Front. Environ. Sci. 2020, 8, 176. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Technology | Components | Type of Signal | Frequency |
|---|---|---|---|
| THz-TDS | FS laser + Photoconductive antennas | Pulsed | THz |
| THz-CW | CW laser + Photoconductive antennas | Continuous | THz |
| THz-QTDS | Multimode laser diode | Pulsed | THz |
| CW-VNA | VNA + VNA extenders | Continuous | GHz, THz |
| FTIR | Michelson interferometer | Continuous | IR |
| Ref. | Estimator | Frequency | Adjustm. | R2 | Error | Technology | Target | Platf. |
|---|---|---|---|---|---|---|---|---|
| [9] | TN | 1.4 GHz | Linear | 0.7 | SEE = 3% | Rad. | S | Aircrf. |
| [10] | σ | 5.4 GHz | Linear | 0.64 | RMSE = 0.03 m3 ·m−3 | Radar | S | Sat. |
| [11] | TB, σ | 1.4 GHz | Linear | 0.794 | RMSE = 0.072 m3 ·m−3 | Radar, Rad. | S | Aircrf. |
| [12] | σ | 5.4 GHz | Linear | 0.676 | RMSE = 0.065 m3 ·m−3 | Radar | S | Sat. |
| [13] | σ, VWC | 5.4 GHz | Linear | 0.76 | RMSE = 2.04% | Radar, Rad. | S | Sat. |
| [14] | PDI, TVDI | NA | No fitting | NA | RMSE = 1.46% | Rad. | S | Sat. |
| [15] | σ, NDVI | 5.4 GHz | Linear | 0.806 | RMSE = 0.043 m3 ·m−3 | Radar, Rad. | S | Sat. |
| [16] | Rλ | 1.17, 1.57 GHz | Linear | 0.98 | SEE = 0.016 m3 ·m−3 | GNSS-R | S | Aircrf. |
| [17] | TGI | NA | Linear | 0.1024 | NA | Camera | S | UAV |
| Ref. | Estimator | Frequency | Adjustm. | R2 | Error | Technology | Target | Platf. |
|---|---|---|---|---|---|---|---|---|
| [18] | TB, NDII | 10.7, 18.7, 37 GHz | Linear | 0.82 | RMSE = 0.96 Kg·m−2 | Rad. | C | Sat. |
| [19] | MR | 6.6, 37 GHz | Linear | 0.85 | RMSE = 10.91 s·m–1 | Rad. | C | Sat. |
| [20] | NDVI, NDWI | NA | Quadratic | 0.85 | RMSE = 0.171 Kg·m−2 | Rad. | C | Sat. |
| [21] | TB | 1.43, 13.3, 37.5 GHz | NA | NA | NA | Rad. | C | Aircrf. |
| [22] | nddVWC | 6.9, 10.7. 18.7 GHz | Linear | 0.6724 | NA | Rad. | C | Sat. |
| [23] | VOD, ω | 1.4, 6.9. 10.7 GHz | NA | NA | NA | Rad. | C | Sat. |
| [24] | Rλ | VIS/IR | No fitting | NA | RMSE = 0.41 m2·m−2 | Rad. | C | Sat. |
| [25] | NDWI | NA | Linear | 0.85 | RMSE = 0.94 Kg·m−2 | Rad. | C | Sat. |
| [26] | Rλ | VIS/IR | NA | NA | NA | Camera, Rad. | C | UAV, Sat. |
| [27] | TS | NA | NA | NA | NA | Rad. | C | Sat. |
| [28] | σ hh/σ hv | 1.26 GHz | Linear | 0.81 | RMSE = 0.12 Kg·m−2 | Radar | C | Aircrf. |
| [29] | C/N0 | 1.57 GHz | Linear | 0.92 | 0.49 dB | GNSS-R | C | Ground |
| [30] | Rλ | VIS/IR | Linear | 0.99 | NA | Camera | C | UAV |
| [31] | VSWI = VI/Tc | VIS/IR | Linear | 0.998 | NA | Camera | C | UAV |
| [32] | CWSIsi | NA | Linear | 0.66 | NA | Camera | C | UAV |
| [33] | TS, ελ | 25–38.46 THz | NA | NA | NA | Camera | C | Tripod |
| [34] | DANS | NA | Linear | 0.77 | NA | Camera | C | UAV |
| [35] | WSI, CWSI | NA | Linear | 0.94 | NA | Camera | C | UAV |
| [36] | σ | 1550 nm | Linear | 0.85 | RMSE = 0.0016 g·cm−2 | TLS | C | Tripod |
| [37] | NDII | NA | Linear | 0.93 | RMSE = 0.00065 g·cm−2 | TLS | C | Tripod |
| [38] | NDII | NA | Linear | 0.94 | RE = 6.3% | TLS | C | Tripod |
| [39] | WBI, NDWI | NA | Linear | 0.8464 | NA | P. spectm. | C | |
| [40] | WI, NDWI | NA | Linear | 0.88 | NA | Spectm. | C | Aircrf. |
| [41] | VIs from Rλ | VIS/IR | NA | ~1 | NA | Spectm. | C | Aircrf. |
| [42] | σ | 13.6 GHz | NA | NA | NA | Scatterometer | C | Sat. |
| Ref. | Estimator | Frequency | Adjustm. | R2 | Error | Technology | Target | Platf. |
|---|---|---|---|---|---|---|---|---|
| [43] | T | THz | No fitting | NA | RMSE = 2% | THz-TDS | L (D) | NA |
| [44] | RI, δ | 0.3–1.8 THz | NA | NA | NA | THz-TDS | L (D) | NA |
| [45] | T | 0.1–2 THz | NA | NA | NA | THz-TDS | L (D) | NA |
| [46] | Г | 10 GHz | NA | NA | NA | CW spects. | L (D) | NA |
| [47] | T | 0.75–1.1 THz | No fitting | NA | RE = 1.2% | CW spects. | L (D) | NA |
| [48] | Г, R1300/R1450 | 1730 MHz | Linear | 0.98 | SEE = 0.00394 | CW spects., P. spectm. | L (D) | NA |
| [49] | Rλ | 3–15 μm | NA | NA | NA | FTIR spects. | L (D) | NA |
| [50] | Rλ | 350–2500 nm | No fitting | NA | RE < 10% | P. spectm. | L (D) | NA |
| [51] | T | 0.3–1.2 MHz | Cubic | 0.99 | NA | U. spects. | L (D) | NA |
| [52] | T | 0.3–1.3 MHz | Unknown | 0.99 | NA | U. spects. | L (D) | NA |
| [53] | T | 0.2–1.3 MHz | No fitting | NA | NA | U. spects. | L (D) | NA |
| [54] | T | 0.3–1.2 MHz | Cubic | 0.99 | NA | U. spects. | L (D) | NA |
| [55] | T, S | 0.3–1.2 MHz | Linear | 0.995 | NA | CW spects., U. spects. | L (D) | NA |
| [56] | T | 0.15–1.6 MHz | Linear | 0.8464 | RMSE = 0.04 | U. spects. | L (D) | NA |
| [57] | RI, δ | 0.6–1.8 THz | Linear | 0.8377 | RMSE = 0.0526% | THz-TDS | L (ND) | NA |
| [58] | τ·LA | 2.55 THz | Linear | 0.99 | NA | THz-TDS | L (ND) | NA |
| [59] | τ·LA | 2.55 THz | Linear | 0.95 | NA | THz-TDS | L (ND) | NA |
| [60] | T | 0.1–2 THz | NA | NA | NA | THz-TDS | L (ND) | NA |
| [62] | T | 150–300 GHz | Linear | 0.9604 | NA | THz-TDS | C, L (ND) | NA |
| [63] | EWT | 100–200 GHz | NA | NA | NA | THz-QTDS | L (ND) | NA |
| [64] | Г | 2.1–4.1 GHz | NA | NA | NA | CW spects. | L (ND) | NA |
| [65] | T | 0.1–1.1 THz | No fitting | NA | SD(0.4 THz) > 0.3 | CW spects. | L (ND) | NA |
| [66] | δ | 35 GHz | Linear | 0.83 | RMSE = 0.17 g | CW spects. | L (ND) | NA |
| [67] | WI, NDVI | NA | Exp. | 0.69 | NA | P. spectm. | L (ND) | NA |
| [68] | Г | 25.86–37.51 GHz | Quadratic | 0.99 | RMSE = 0.27% | P. FMCW Radar | F (ND) | NA |
| [69] | gs-max | NA | 1/gs-max | 0.98 | NA | Porometer | L (ND) | NA |
| Ref. | Estimator | Frequency | Adjustm. | R2 | Error | Technology | Target | Platf. |
|---|---|---|---|---|---|---|---|---|
| [71] | ε | 0.5 GHz | NA | NA | NA | PDP | T (I) | NA |
| [72] | ε | 1.25 GHz | NA | NA | NA | PDP | T (I) | NA |
| [73] | ε | 0.45, 1.2 GHz. 5 GHz | NA | NA | NA | PDP | T (I) | NA |
| [74] | ε | 1.25 GHz | NA | NA | NA | PDP | T (I) | NA |
| [75] | ε | 1–10 GHz | NA | NA | NA | PDP | T (NI) | NA |
| [76] | ε | 70, 78 MHz, 3.5, 4 GHz | Unknown | 0.29 | NA | VSWC | T (I) | NA |
| [78] | SFR | NA | NA | NA | NA | SFR gauge | T (NI) | NA |
| [79] | SFR | NA | No fitting | NA | RMSE = 69 g·plant–1·d–1 | SFR gauge | T (NI) | NA |
| [80] | SFR | NA | NA | NA | NA | SFR gauge | T (NI) | NA |
| [81] | V·A | NA | NA | 0.94 | NA | SFD gauge | T (I) | NA |
| [82] | Г | 0.14–0.22 THz | NA | NA | NA | CW spects. | T (NI) | NA |
| [83] | Г | 0.14–0.22 THz | NA | NA | NA | CW spects., Radar | T (NI) | NA |
| [84] | FT(I–jQ) | 21.4–24.8 GHz | Quadratic | 0.995 | NA | P. FMCW Radar | T (NI) | NA |
| [85] | ANMR | NA | NA | NA | NA | NMR | T (NI) | NA |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Quemada, C.; Pérez-Escudero, J.M.; Gonzalo, R.; Ederra, I.; Santesteban, L.G.; Torres, N.; Iriarte, J.C. Remote Sensing for Plant Water Content Monitoring: A Review. Remote Sens. 2021, 13, 2088. https://doi.org/10.3390/rs13112088
Quemada C, Pérez-Escudero JM, Gonzalo R, Ederra I, Santesteban LG, Torres N, Iriarte JC. Remote Sensing for Plant Water Content Monitoring: A Review. Remote Sensing. 2021; 13(11):2088. https://doi.org/10.3390/rs13112088
Chicago/Turabian StyleQuemada, Carlos, José M. Pérez-Escudero, Ramón Gonzalo, Iñigo Ederra, Luis G. Santesteban, Nazareth Torres, and Juan Carlos Iriarte. 2021. "Remote Sensing for Plant Water Content Monitoring: A Review" Remote Sensing 13, no. 11: 2088. https://doi.org/10.3390/rs13112088
APA StyleQuemada, C., Pérez-Escudero, J. M., Gonzalo, R., Ederra, I., Santesteban, L. G., Torres, N., & Iriarte, J. C. (2021). Remote Sensing for Plant Water Content Monitoring: A Review. Remote Sensing, 13(11), 2088. https://doi.org/10.3390/rs13112088