
Ionospheric Scintillation Prediction on S4 and ROTI Parameters Using Artificial Neural Network and Genetic Algorithm




Abstract
:1. Introduction
2. Data Collection
2.1. Scintillation Detection
2.2. Rate of TEC Index
2.3. Physical Parameters Affecting Ionospheric Scintillation
3. Methodology
3.1. Artificial Neural Network
3.2. Genetic Algorithm
3.3. Combining ANN and GA
- Network Design
- 2.
- Finding the Best Initial Weights by Using the Genetic Algorithm
- 3.
- Network Training
4. Results and Discussion
5. Evaluation of Results
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- De Paula, E.; Rodrigues, F.; Iyer, K.; Kantor, I.; Abdu, M.; Kintner, P.; Ledvina, B.; Kil, H. Equatorial anomaly effects on GPS scintillations in brazil. Adv. Space Res. 2003, 31, 749–754. [Google Scholar] [CrossRef]
- Xu, R.; Liu, Z.; Li, M.; Morton, Y.; Chen, W. An Analysis of Low-Latitude Ionospheric Scintillation and Its Effects on Pre-cise Point Positioning. J. Glob. Position. Syst. 2012, 11, 22–32. [Google Scholar] [CrossRef]
- Appleton, E.V. The anomalous equatorial belt in the F2-layer. J. Atmospheric Terr. Phys. 1954, 5, 348–351. [Google Scholar] [CrossRef]
- Ma, G.; Maruyama, T. A super bubble detected by dense GPS network at east Asian longitudes. Geophys. Res. Lett. 2006, 33. [Google Scholar] [CrossRef]
- Demyanov, V.V.; Yasyukevich, Y.V.; Ishin, A.B.; Astafyeva, E.I. Ionospheric super-bubble effects on the GPS positioning relative to the orientation of signal path and geomagnetic field direction. GPS Solut. 2011, 16, 181–189. [Google Scholar] [CrossRef]
- Abdu, M. Outstanding problems in the equatorial ionosphere-thermosphere electrodynamics relevant to spread F. J. Atmos. Sol. Terr. Phys. 2001, 63, 869–884. [Google Scholar] [CrossRef]
- Anderson, P.C.; Straus, P.R. Magnetic field orientation control of GPS occultation observations of equatorial scintillation. Geophys. Res. Lett. 2005, 32. [Google Scholar] [CrossRef]
- De Lima, G.R.T.; Stephany, S.; De Paula, E.R.; Batista, I.S.; Abdu, M.A. Prediction of the level of ionospheric scintillation at equatorial latitudes in Brazil using a neural network. Space Weather 2015, 13, 446–457. [Google Scholar] [CrossRef]
- Ratnam, D.V.; Sivavaraprasad, G.; Lee, J. Automatic ionospheric scintillation detector for global navigation satellite system receivers. IET Radar Sonar Navig. 2015, 9, 702–711. [Google Scholar] [CrossRef]
- Sivavaraprasad, G.; Padmaja, R.S.; Ratnam, D.V. Mitigation of Ionospheric Scintillation Effects on GNSS Signals Using Variational Mode Decomposition. IEEE Geosci. Remote Sens. Lett. 2017, 14, 389–393. [Google Scholar] [CrossRef]
- Sivavaraprasad, G.; Ratnam, D.V.; Otsuka, Y. Multicomponent Analysis of Ionospheric Scintillation Effects Using the Synchrosqueezing Technique for Monitoring and Mitigating their Impact on GNSS Signals. J. Navig. 2019, 72, 669–684. [Google Scholar] [CrossRef]
- Knight, M.F. Ionospheric Scintillation Effects on Global Positioning System Receivers; Department of Electrical and Electronic Engineering, University of Adelaide: Adelaide, Australia, 2000. [Google Scholar]
- Sridhar, M.; Ratnam, D.V.; Raju, K.P.; Praharsha, D.S.; Saathvika, K. Ionospheric scintillation forecasting model based on NN-PSO technique. Astrophys. Space Sci. 2017, 362, 166. [Google Scholar] [CrossRef]
- Costa, E.; Basu, S. A radio wave scattering algorithm and irregularity model for scintillation predictions. Radio Sci. 2002, 37, 1–13. [Google Scholar] [CrossRef]
- Béniguel, Y.; Adam, J.-P.; Jakowski, N.; Noack, T.; Wilken, V.; Valette, J.-J.; Cueto, M.; Bourdillon, A.; Lassudrie-Duchesne, P.; Arbesser-Rastburg, B. Analysis of scintillation recorded during the PRIS measurement campaign. Radio Sci. 2009, 44, 1–11. [Google Scholar] [CrossRef]
- Forte, B.; Radicella, S.M. Comparison of ionospheric scintillation models with experimental data for satellite navigation applications. Ann. Geophys. 2005. [Google Scholar] [CrossRef]
- Secan, J.A.; Bussey, R.M.; Fremouw, E.J.; Basu, S. An improved model of equatorial scintillation. Radio Sci. 1995, 30, 607–617. [Google Scholar] [CrossRef]
- Secan, J.A.; Bussey, R.M.; Fremouw, E.J.; Basu, S. High-latitude upgrade to the Wideband ionospheric scintillation model. Radio Sci. 1997, 32, 1567–1574. [Google Scholar] [CrossRef]
- Das, A.; Das Gupta, A.; Ray, S. Characteristics of L-band (1.5 GHz) and VHF (244 MHz) amplitude scintillations recorded at Kolkata during 1996–2006 and development of models for the occurrence probability of scintillations using neural network. J. Atmos. Sol. Terr. Phys. 2010, 72, 685–704. [Google Scholar] [CrossRef]
- Rezende, L.F.C.; de Paula, E.R.; Stephany, S.; Kantor, I.J.; Muella, M.T.A.H.; de Siqueira, P.M.; Correa, K.S. Survey and prediction of the ion-ospheric scintillation using data mining techniques. Space Weather 2010, 8, 1–10. [Google Scholar] [CrossRef]
- Redmon, R.J.; Anderson, D.; Caton, R.; Bullett, T. A Forecasting Ionospheric Real-time Scintillation Tool (FIRST). Space Weather 2010, 8. [Google Scholar] [CrossRef]
- De Lima, G.R.T.; Stephany, S.; de Paula, E.R.; Batista, I.S.; Abdu, M.A.; Rezende, L.F.C.; Aquino, M.G.S.; Dutra, A.P.S. Correlation analysis between the occurrence of ionospheric scintillation at the magnetic equator and at the southern peak of the equatorial ion-ization anomaly. Space Weather 2014, 12, 406–416. [Google Scholar] [CrossRef]
- Priyadarshi, S. A Review of Ionospheric Scintillation Models. Surv. Geophys. 2015, 36, 295–324. [Google Scholar] [CrossRef] [Green Version]
- Van Dierendonck, A.; Klobuchar, J.; Hua, Q. Ionospheric scintillation monitoring using commercial single frequency C/A code receivers. In Proceedings of the 6th International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GPS 1993), Salt Lake City, UT, USA, 22–24 September 1993; pp. 1333–1342. [Google Scholar]
- Tiwari, R.; Strangeways, H.J. Regionally based alarm index to mitigate ionospheric scintillation effects for GNSS receivers. Space Weather 2015, 13, 72–85. [Google Scholar] [CrossRef] [Green Version]
- Juan, J.M.; Aragon-Angel, A.; Sanz, J.; González-Casado, G.; Rovira-Garcia, A. A method for scintillation characterization using geodetic receivers operating at 1 Hz. J. Geod. 2017, 91, 1383–1397. [Google Scholar] [CrossRef] [Green Version]
- Van Dierendonck, A.J.; Arbesser-Rastburg, B. Measuring ionospheric scintillation in the equatorial region over Africa, in-cluding measurements from SBAS geostationary satellite signals. In Proceedings of the ION GNSS 17th Technical Meeting of the Satellite Division, Long Beach, CA, USA, 21–24 September 2004; pp. 316–324. [Google Scholar]
- Demyanov, V.V.; Sergeeva, M.A.; Yasyukevich, A.S. GNSS High-Rate Data and the Efficiency of Ionospheric Scintillation Indices. In Book Satellites Missions and Technologies for Geosciences; Intech Open Limited: London, UK, 2020. [Google Scholar]
- Taabu, S.D.; D’ujanga, F.M.; Ssenyonga, T. Prediction of ionospheric scintillation using neural network over East African region during ascending phase of sunspot cycle 24. Adv. Space Res. 2016, 57, 1570–1584. [Google Scholar] [CrossRef]
- Alfonsi, L.; Spogli, L.; Tong, J.R.; De Franceschi, G.; Romano, V.; Bourdillon, A.; Le Huy, M.; Mitchell, C.N. GPS scintillation and TEC gradients at equatorial latitudes in April 2006. Adv. Space Res. 2011, 47, 1750–1757. [Google Scholar] [CrossRef]
- Yang, Z.; Liu, Z. Correlation between ROTI and Ionospheric Scintillation Indices using Hong Kong low-latitude GPS data. GPS Solut. 2016, 20, 815–824. [Google Scholar] [CrossRef]
- Zou, Y.; Wang, D. A study of GPS ionospheric scintillations observed at Guilin. J. Atmos. Sol. Terr. Phys. 2009, 71, 1948–1958. [Google Scholar] [CrossRef]
- Basu, S.; Groves, K.; Quinn, J.; Doherty, P. A comparison of TEC fluctuations and scintillations at Ascension Island. J. Atmos. Sol. Terr. Phys. 1999, 61, 1219–1226. [Google Scholar] [CrossRef]
- Pi, X.; Mannucci, A.J.; Lindqwister, U.J.; Ho, C.M. Monitoring of global ionospheric irregularities using the Worldwide GPS Network. Geophys. Res. Lett. 1997, 24, 2283–2286. [Google Scholar] [CrossRef]
- Li, G.; Ning, B.; Yuan, H. Analysis of ionospheric scintillation spectra and TEC in the Chinese low latitude region. Earth Planets Space 2007, 59, 279–285. [Google Scholar] [CrossRef] [Green Version]
- Sultan, P.J. Linear theory and modeling of the Rayleigh-Taylor instability leading to the occurrence of equatorial spread F. J. Geophys. Res. Space Phys. 1996, 101, 26875–26891. [Google Scholar] [CrossRef]
- Zolesi, B.; Cander, L.R. The General Structure of the Ionosphere. In Ionospheric Prediction and Forecasting; Springer: Berlin/Heidelberg, Germany, 2013; pp. 11–48. [Google Scholar]
- Wilkinson, J. New Eyes on the Sun: A Guide to Satellite Images and Amateur Observation; Springer Science & Business Media: Berlin, Germany, 2012. [Google Scholar] [CrossRef]
- Aquino, M.H.; Waugh, S.; Dodson, A.; Moore, T.; Skone, S. GPS based ionospheric scintillation monitoring. In Proceedings of the Space Weather Workshop: Looking towards a European Space Weather Programme, Noordwijk, The Netherlands, 17–19 December 2004. [Google Scholar]
- Li, G.; Ning, B.; Zhao, B.; Liu, L.; Liu, J.Y.; Yumoto, K. Effects of geomagnetic storm on GPS ionospheric scintillations at Sanya. J. Atmos. Sol. Terr. Phys. 2008, 70, 1034–1045. [Google Scholar] [CrossRef]
- Li, G.; Ning, B.; Wang, C.; Abdu, M.A.; Otsuka, Y.; Yamamoto, M.; Wu, J.; Chen, J. Storm-enhanced development of postsunset equatorial plasma bubbles around the meridian 120°E/60°W on 7–8 September 2017. J. Geophys. Res. Space Phys. 2018, 123, 7985–7998. [Google Scholar] [CrossRef]
- Tilahun, S.; Tariku, Y.A. Verification of ionospheric perturbation induced L-band frequency scintillation using HF/VHF bands over the African equatorial and low latitude region, Ethiopia. J. Atmos. Sol. Terr. Phys. 2019, 195, 105135. [Google Scholar] [CrossRef]
- Haykin, S.S. Neural Networks and Learning Machines/Simon Haykin; Prentice Hall: New York, NY, USA, 2009. [Google Scholar]
- Beale, R.; Jackson, T. Neural Computing—An Introduction; CRC Press: London, UK, 1990. [Google Scholar]
- Norgaard, M. Neural Network Based System Identification Toolbox; Department of Automation, Technical University of Denmark: Lyngby, Denmark, 2000. [Google Scholar]
- Gen, M.; Lin, L. Genetic Algorithms. Wiley Encycl. Comput. Sci. Eng. 2007, 1–15. [Google Scholar] [CrossRef]
- Schaffer, J.; Whitley, D.; Eshelman, L. Combinations of genetic algorithms and neural networks: A survey of the state of the art. In Proceedings of the COGANN-92: International Workshop on Combinations of Genetic Algorithms and Neural Networks, Baltimore, MD, USA, 6 June 1992; IEEE: Piscataway, NJ, USA, 2003; pp. 1–37. [Google Scholar]
- Alonso, J.M.; Alvarruiz, F.; Desantes, J.M.; Hernández, L.; Hernández, V.; Molto, G. Combining neural networks and genetic algorithms to predict and reduce diesel engine emissions. IEEE Trans. Evol. Comput. 2007, 11, 46–55. [Google Scholar] [CrossRef]
- Montana, D.J.; Davis, L. Training Feedforward Neural Networks Using Genetic Algorithms. IJCAI 1989, 89, 762–767. [Google Scholar]
- Le, L.T.; Nguyen, H.; Dou, J.; Zhou, J. A Comparative Study of PSO-ANN, GA-ANN, ICA-ANN, and ABC-ANN in Estimating the Heating Load of Buildings’ Energy Efficiency for Smart City Planning. Appl. Sci. 2019, 9, 2630. [Google Scholar] [CrossRef] [Green Version]
- Mallika, I.L.; Ratnam, D.V.; Ostuka, Y.; Sivavaraprasad, G.; Raman, S. Implementation of hybrid iono-spheric TEC forecasting algorithm using PCA-NN method. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2018, 12, 371–381. [Google Scholar] [CrossRef]
- Cook, D.F.; Ragsdale, C.T.; Major, R.L. Combining a neural network with a genetic algorithm for process parameter optimization. Eng. Appl. Artif. Intell. 2000, 13, 391–396. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| 2015 | 2017 | 2020 | |||||||
|---|---|---|---|---|---|---|---|---|---|
| Period of Time | 1–30 January | 1–30 March | 1–30 July | 1–30 January | 1–30 March | 1–30 July | 1–30 January | 1–30 March | 1–30 July |
| Mean S4 | 0.22 | 0.24 | 0.20 | 0.19 | 0.21 | 0.17 | 0.15 | 0.16 | 0.14 |
| Max S4 | 0.42 | 0.51 | 0.38 | 0.44 | 0.49 | 0.41 | 0.41 | 0.43 | 0.36 |
| RMSE | 0.009 | 0.008 | 0.009 | 0.008 | 0.007 | 0.008 | 0.007 | 0.006 | 0.007 |
| R-Squared | 0.92 | 0.91 | 0.92 | 0.92 | 0.92 | 0.93 | 0.93 | 0.92 | 0.94 |
| Scintillation Occurrence (S4 > 0.2) | 56% | 61% | 53% | 45% | 51% | 41% | 25% | 28% | 21% |
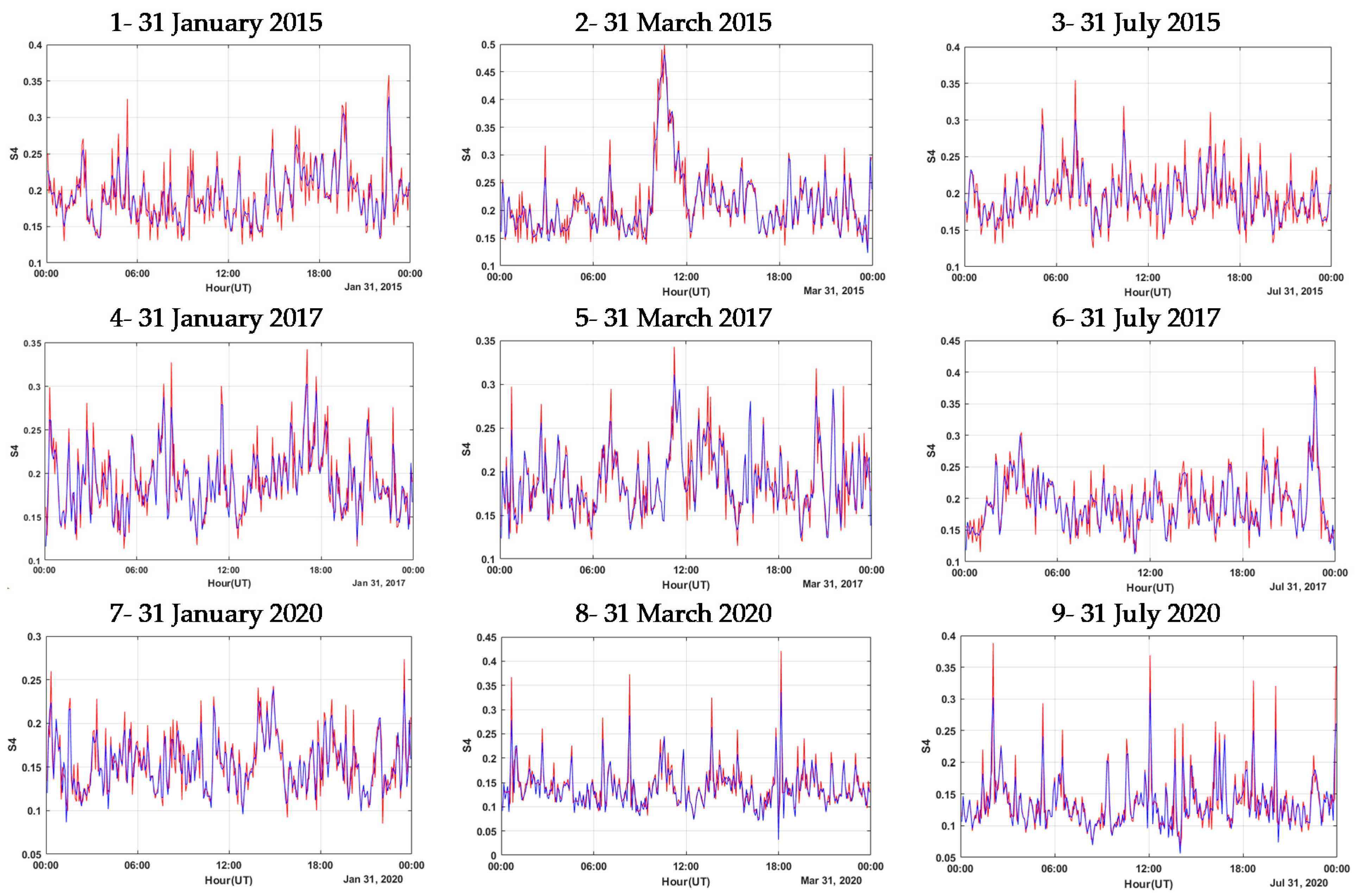
| 2015 | 2017 | 2020 | |||||||
|---|---|---|---|---|---|---|---|---|---|
| Period of Time | 31 January | 31 March | 31 July | 31 January | 31 March | 31 July | 31 January | 31 March | 31 July |
| Mean S4 | 0.19 | 0.21 | 0.19 | 0.17 | 0.18 | 0.17 | 0.13 | 0.15 | 0.12 |
| Max S4 | 0.35 | 0.49 | 0.35 | 0.34 | 0.34 | 0.41 | 0.27 | 0.42 | 0.39 |
| RMSE | 0.022 | 0.024 | 0.022 | 0.019 | 0.022 | 0.018 | 0.015 | 0.016 | 0.013 |
| R-Squared | 0.81 | 0.80 | 0.81 | 0.81 | 0.80 | 0.81 | 0.83 | 0.82 | 0.85 |
| Scintillation Occurrence (S4 > 0.2) | 48% | 53% | 47% | 39% | 43% | 39% | 9% | 10% | 7% |
| 2015 | 2017 | 2020 | |||||||
|---|---|---|---|---|---|---|---|---|---|
| Period of Time | 1–30 January | 1–30 March | 1–30 July | 1–30 January | 1–30 March | 1–30 July | 1–30 January | 1–30 March | 1–30 July |
| Mean ROTI | 0.97 | 1.14 | 0.96 | 0.81 | 0.91 | 0.79 | 0.77 | 0.78 | 0.74 |
| Max ROTI | 9.47 | 11.42 | 7.39 | 7.91 | 8.43 | 7.12 | 7.63 | 7.78 | 6.71 |
| RMSE | 0.008 | 0.009 | 0.008 | 0.007 | 0.008 | 0.007 | 0.007 | 0.007 | 0.006 |
| R-Squared | 0.91 | 0.90 | 0.91 | 0.91 | 0.90 | 0.92 | 0.92 | 0.92 | 0.93 |
| 2015 | 2017 | 2020 | |||||||
|---|---|---|---|---|---|---|---|---|---|
| Period of Time | 31 January | 31 March | 31 July | 31 January | 31 March | 31 July | 31 January | 31 March | 31 July |
| Mean ROTI | 0.92 | 1.67 | 0.91 | 0.76 | 0.79 | 0.75 | 0.74 | 0.75 | 0.73 |
| Max ROTI | 1.30 | 2.18 | 1.24 | 1.10 | 1.03 | 0.94 | 1.18 | 1.05 | 1.03 |
| RMSE | 0.021 | 0.032 | 0.021 | 0.018 | 0.020 | 0.018 | 0.018 | 0.018 | 0.017 |
| R-Squared | 0.82 | 0.80 | 0.82 | 0.83 | 0.82 | 0.83 | 0.83 | 0.83 | 0.84 |
| Mean VTEC | 35.33 | 39.95 | 18.37 | 15.74 | 19.21 | 12.71 | 12.48 | 16.29 | 9.78 |
| Max VTEC | 66.83 | 77.16 | 40.25 | 31.66 | 47.72 | 25.41 | 25.58 | 33.51 | 18.42 |
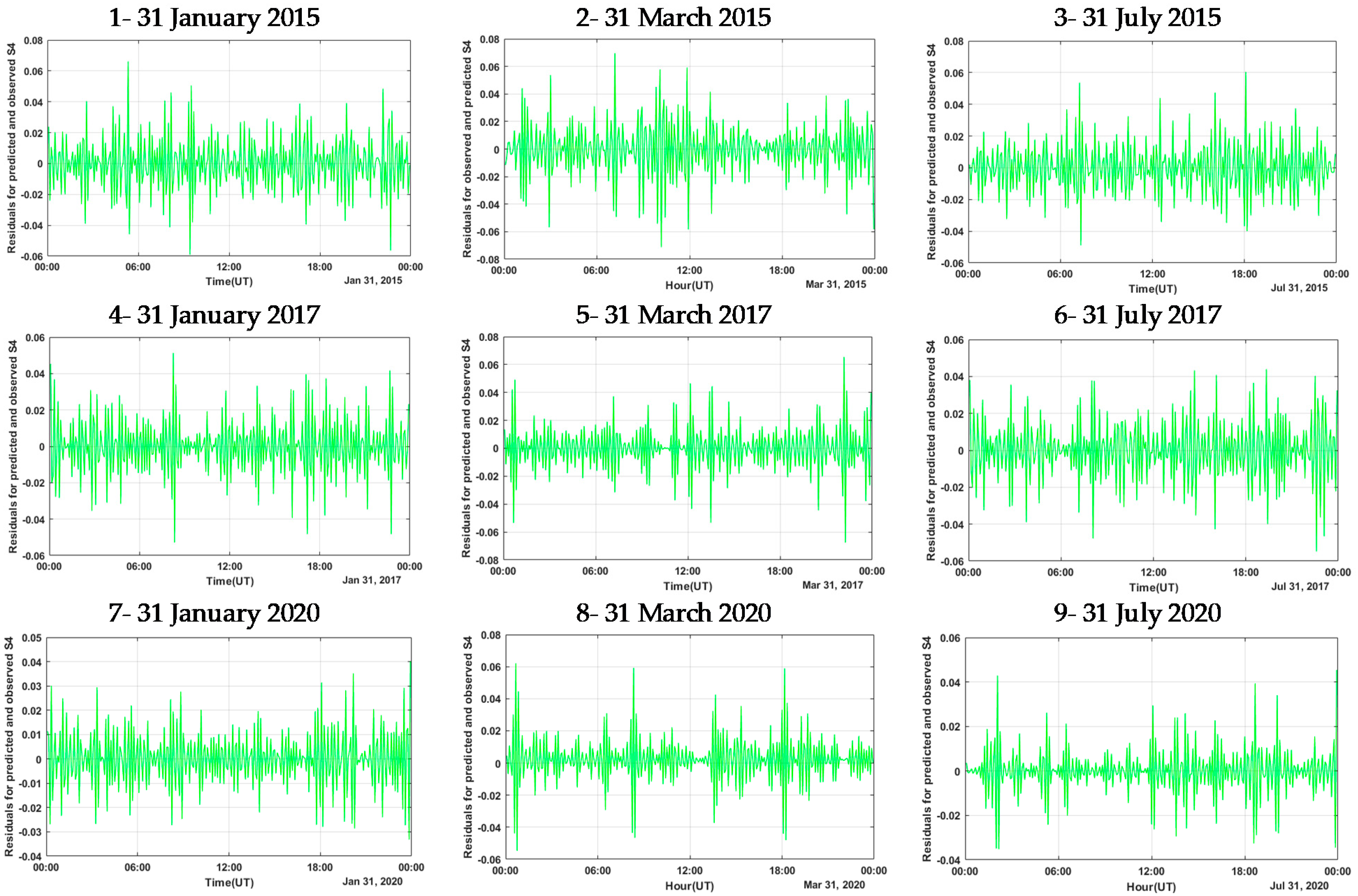
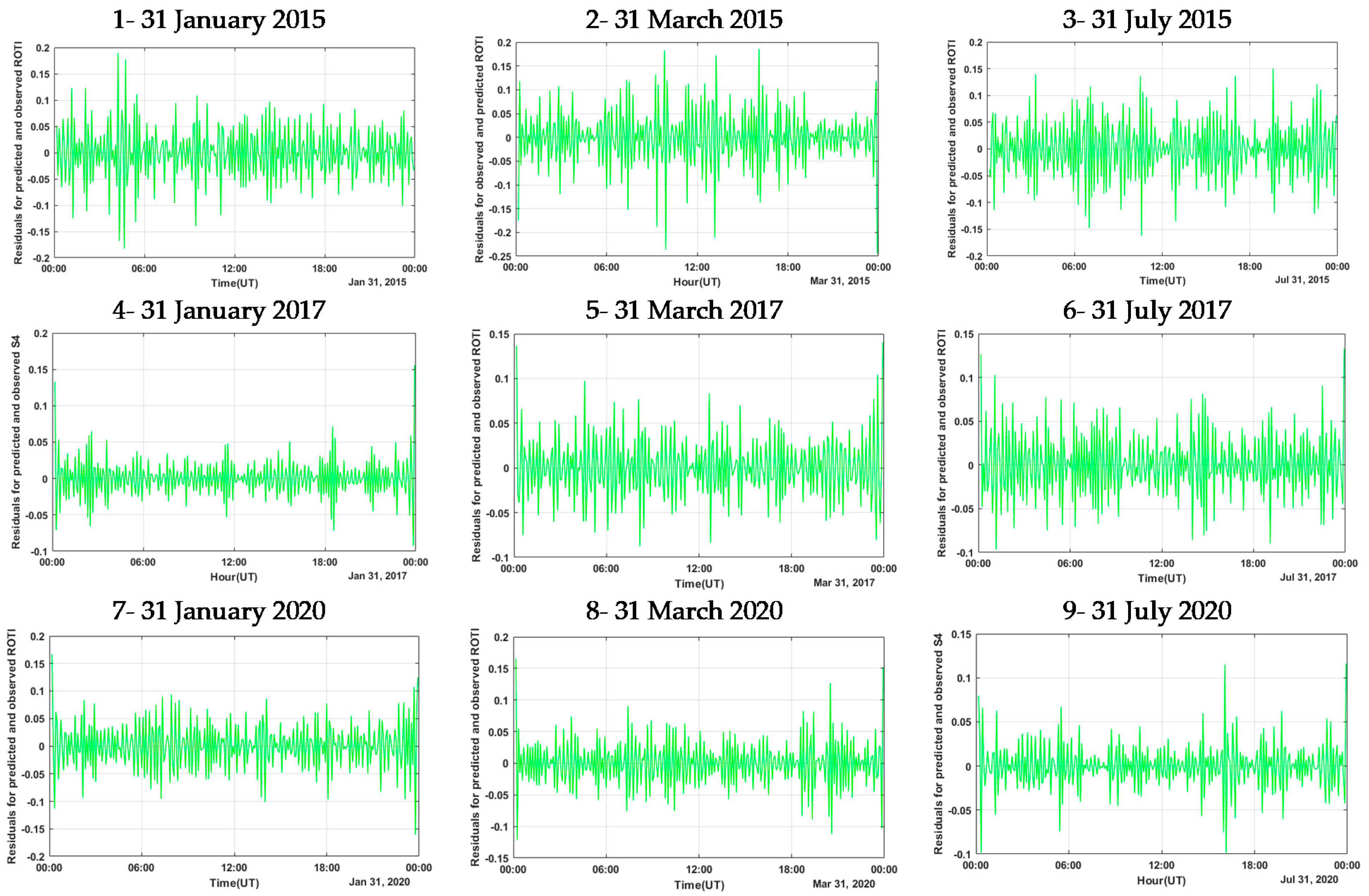
| 2015 | 2017 | 2020 | |||||||
|---|---|---|---|---|---|---|---|---|---|
| Period of Time | 31 January | 31 March | 31 July | 31 January | 31 March | 31 July | 31 January | 31 March | 31 July |
| Mean Absolute Residual S4 | 0.03 | 0.04 | 0.03 | 0.03 | 0.03 | 0.02 | 0.02 | 0.02 | 0.02 |
| Max Absolute Residual S4 | 0.06 | 0.07 | 0.06 | 0.05 | 0.06 | 0.05 | 0.05 | 0.06 | 0.04 |
| Mean Absolute Residual ROTI | 0.04 | 0.05 | 0.04 | 0.03 | 0.03 | 0.02 | 0.03 | 0.03 | 0.02 |
| Max Absolute Residual ROTI | 0.18 | 0.19 | 0.16 | 0.15 | 0.14 | 0.13 | 0.16 | 0.16 | 0.11 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Atabati, A.; Alizadeh, M.; Schuh, H.; Tsai, L.-C. Ionospheric Scintillation Prediction on S4 and ROTI Parameters Using Artificial Neural Network and Genetic Algorithm. Remote Sens. 2021, 13, 2092. https://doi.org/10.3390/rs13112092
Atabati A, Alizadeh M, Schuh H, Tsai L-C. Ionospheric Scintillation Prediction on S4 and ROTI Parameters Using Artificial Neural Network and Genetic Algorithm. Remote Sensing. 2021; 13(11):2092. https://doi.org/10.3390/rs13112092
Chicago/Turabian StyleAtabati, Alireza, Mahdi Alizadeh, Harald Schuh, and Lung-Chih Tsai. 2021. "Ionospheric Scintillation Prediction on S4 and ROTI Parameters Using Artificial Neural Network and Genetic Algorithm" Remote Sensing 13, no. 11: 2092. https://doi.org/10.3390/rs13112092