
In-Orbit Operational Parameter Calculation and Performance Optimization in KOMPSAT-6 Synthetic Aperture Radar


Abstract
:1. Introduction
2. Designing Nominal SAR Operational Parameters at Nominal Altitude
2.1. Mission Requirement Definition
2.2. PRF Selection Considering Ambiguity
2.3. PRF Selection and Timing
2.4. Design Results on Nominal SAR Operational Parameters
3. Optimizing In-Orbit SAR Operational Parameters for Altitude Variation
3.1. Definition of Swath Angle for Image Acquisition
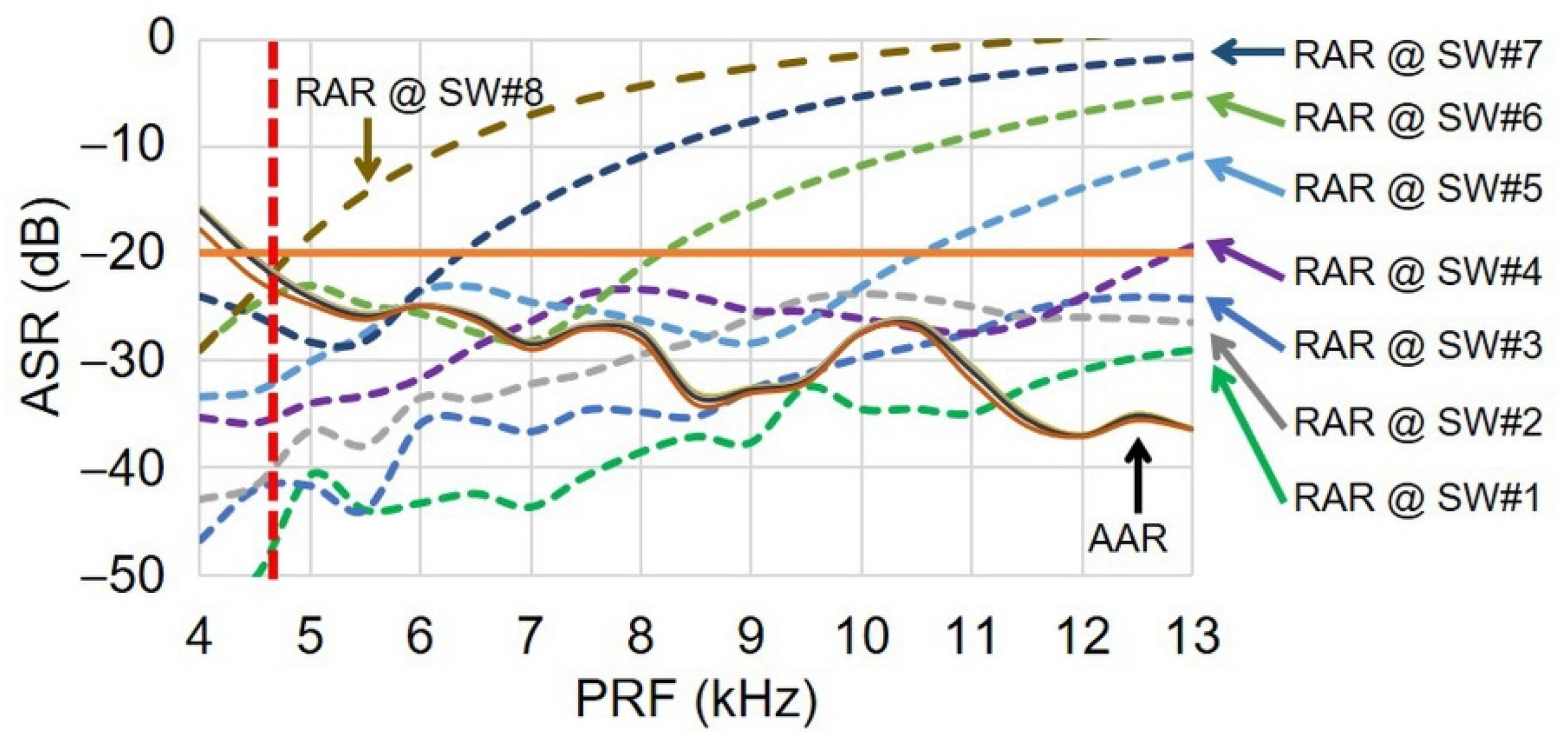
3.2. PRF Optimization
3.2.1. Selection of Constant PRF
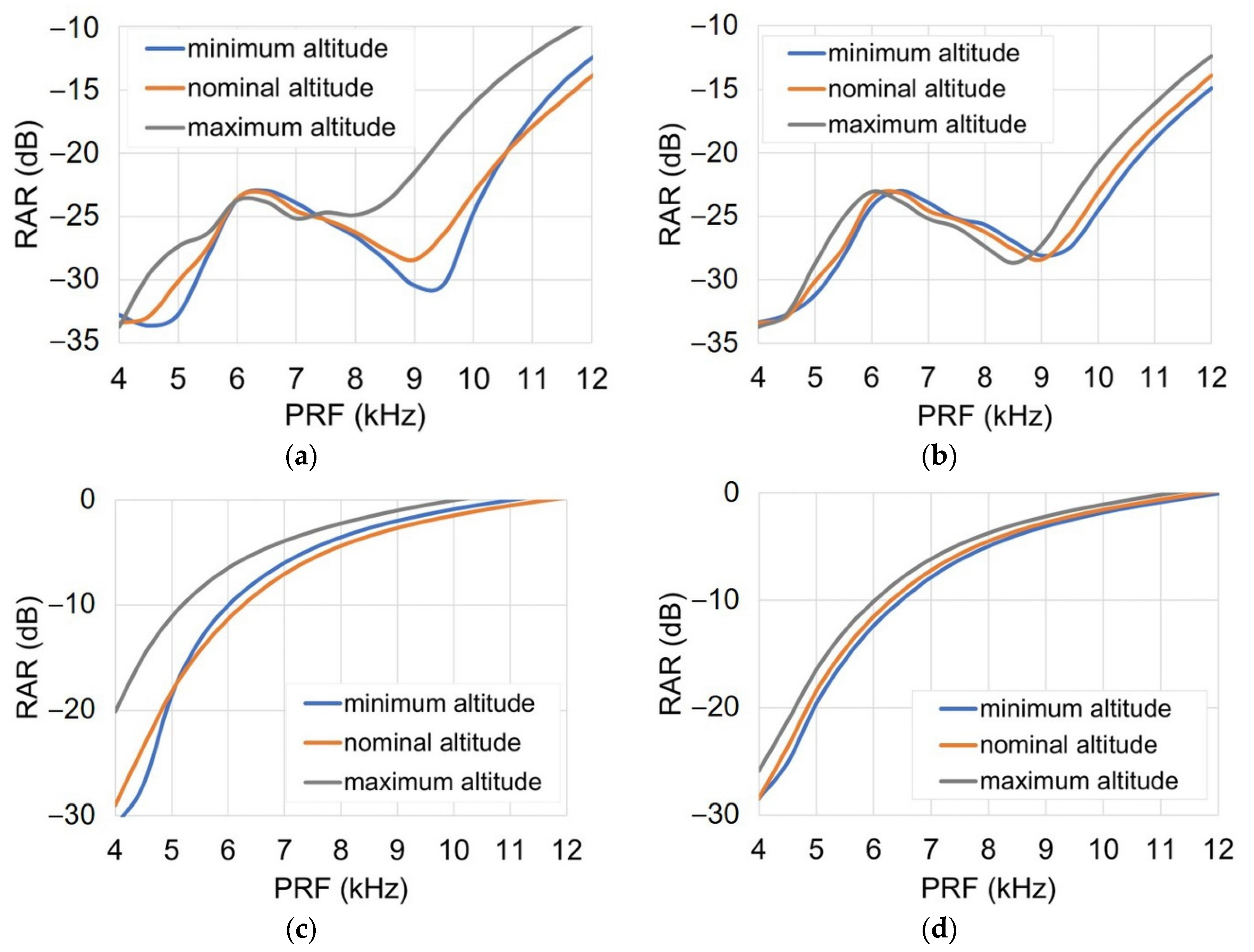
3.2.2. PRF Optimization Using the Altitude Ratio
3.2.3. PRF Optimization Using Travelling Return Time
3.2.4. PRF Optimization Results
4. Results
4.1. Optimization Results for In-Orbit SAR Operational Paramters
4.2. On-Board PRF Optimization for Real-Time Operation
5. Discussions
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Lee, S.-R.; Kim, J.-H.; Yoonk, J.-C. First SAR Satellite in Korea, KOMPSAT-5. Int. Conf. Space Aeronaut. Navig. Electron. (ICSANE) 2012, 112, 253–257. [Google Scholar]
- Lee, S.-R. Overview of KOMPSAT-5 program, mission, and system. In Proceedings of the 2010 IEEE International Geoscience and Remote Sensing Symposium; Institute of Electrical and Electronics Engineers (IEEE), Honolulu, HI, USA, 25–30 July 2010; pp. 797–800. [Google Scholar]
- Yoon, J.C.; Keum, J.H.; Shin, J.M.; Kim, J.H.; Lee, S.R.; Bauleo, A.; Farina, C.; Germani, C.; Mappini, M.; Venturini, R. KOMPSAT-5 SAR Design and Performance. In Proceedings of the 3rd International Asia-Pacific Conference on Synthetic Aperture Radar, APSAR, Seoul, Korea, 26–30 September 2011. [Google Scholar]
- Bauelo, A.; Farina, C.; Germani, C.; Petrini, P.; Sirocchi, G.; Torini, A.; Won, Y.J.; Mun, H.Y.; Woo, S.H.; Kim, J.H.; et al. KOMPSAT-5 SAR P/L On the ground Verification Campaign. In Proceedings of the 3rd International Asia-Pacific Conference on Synthetic Aperture Radar, APSAR, Seoul, Korea, 26–30 September 2011. [Google Scholar]
- Lee, S.-H.; Yoon, J.-C.; Kim, J.-H. KOMPSAT-6 Mission, Operation Concept, and System Design. In Proceedings of the EUSAR 2016: 11th European Conference on Synthetic Aperture Radar, Hamburg, Germany, 6–9 June 2016; pp. 161–164. [Google Scholar]
- Hwang, Y.C.; Nam, C.H.; Pak, U.Y.; Kim, S.Y.; Lee, J.H. KOMPSAT-6 SAR Payload System Design. In Proceedings of the EUSAR 2016: 11th European Conference on Synthetic Aperture Radar, Hamburg, Germany, 6–9 June 2016; pp. 165–167. [Google Scholar]
- Kang, C.; Jung, O.; Oh, T.; Yang, D.; Jeun, G. Operation concept of KOMPSAT-6 ground segment. In Proceedings of the EUSAR 2016: 11th European Conference on Synthetic Aperture Radar, Hamburg, Germany, 6–9 June 2016; pp. 168–173. [Google Scholar]
- Kim, S.Y.; Myung, N.H.; Kang, M.J. Antenna Mask Design for SAR Performance Optimization. IEEE Geosci. Remote. Sens. Lett. 2009, 6, 443–447. [Google Scholar] [CrossRef]
- Curlander, J.C.; McDonough, R.N. SAR Flight System. Synthetic Aperture Radar Systems and Signal Processing; Kong, J.A., Ed.; John Wiley & Sons, Inc.: New York, NY, USA, 1991; pp. 294–308. [Google Scholar]



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Value |
|---|---|
| Satellite altitude | 509–540 km |
| Incidence angle range | 20–55° |
| Ground swath width | 5 km |
| NESZ | −20 dB |
| RAR | −20 dB |
| AAR | −20 dB |
| Symbols | Description |
|---|---|
| Echo delay time projected into the cross-track ground plane | |
| Elevation angle | |
| Azimuth angle | |
| Two-way far field antenna power pattern | |
| Backscattering coefficient | |
| Incidence angle from target signal | |
| Incidence angle from ambiguous signal | |
| Slant range of target signal | |
| Slant range of ambiguous signal | |
| Target Doppler bandwidth |
| Parameter | SW#1 | SW#2 | SW#3 | SW#4 | SW#5 | SW#6 | SW#7 | SW#8 |
|---|---|---|---|---|---|---|---|---|
| Incidence angle at center (°) | 20.03 | 25.14 | 29.91 | 35.16 | 39.90 | 45.14 | 50.00 | 54.93 |
| PRF (Hz) | 11839.6 | 8549.9 | 11755.5 | 11874.6 | 8956.5 | 6849.7 | 5742.9 | 4691.9 |
| Tx pulse length (us) | 25.33 | 35.09 | 25.52 | 25.26 | 33.49 | 43.79 | 52.24 | 63.93 |
| Maximum azimuth steering angle (°) | 1.65 | 1.63 | 1.60 | 1.56 | 1.51 | 1.47 | 1.42 | 1.43 |
| Image acquisition time (s) | 5.96 | 6.07 | 6.19 | 6.37 | 6.56 | 6.84 | 7.16 | 7.78 |
| NESZ (dB) | −26.41 | −25.57 | −24.69 | −24.35 | −23.77 | −22.98 | −21.96 | −20.96 |
| RAR (dB) | −31.42 | −34.87 | −26.06 | −24.64 | −28.63 | −28.61 | −25.93 | −21.25 |
| AAR (dB) | −38.49 | −33.16 | −38.19 | −38.40 | −32.60 | −27.85 | −26.36 | −24.50 |
| Parameter | SW#1 | SW#2 | SW#3 | SW#4 | SW#5 | SW#6 | SW#7 | SW#8 |
|---|---|---|---|---|---|---|---|---|
| Incidence angle at center (°) | 19.99 | 25.10 | 29.86 | 35.10 | 39.82 | 45.05 | 49.89 | 54.80 |
| PRF (Hz) | 12,092.43 | 8733.80 | 12,014.83 | 12,137.03 | 9155.67 | 7002.14 | 5873.40 | 4810.17 |
| Tx pulse length (us) | 24.81 | 34.35 | 24.97 | 24.72 | 32.76 | 42.84 | 51.08 | 62.36 |
| Maximum azimuth steering angle (°) | 1.68 | 1.65 | 1.62 | 1.58 | 1.53 | 1.48 | 1.43 | 1.45 |
| Image acquisition time (s) | 5.90 | 6.00 | 6.12 | 6.29 | 6.48 | 6.75 | 7.06 | 7.67 |
| Parameter | SW#1 | SW#2 | SW#3 | SW#4 | SW#5 | SW#6 | SW#7 | SW#8 |
|---|---|---|---|---|---|---|---|---|
| Incidence angle at center (°) | 20.09 | 25.22 | 30.01 | 35.28 | 40.03 | 45.31 | 50.20 | 55.17 |
| PRF (Hz) | 11,395.36 | 8228.86 | 11,317.62 | 11,428.90 | 8618.00 | 6586.90 | 5520.74 | 4516.21 |
| Tx pulse length (us) | 26.32 | 36.46 | 26.51 | 26.25 | 34.81 | 45.54 | 54.33 | 66.42 |
| Maximum azimuth steering angle (°) | 1.62 | 1.59 | 1.56 | 1.52 | 1.48 | 1.43 | 1.39 | 1.40 |
| Image acquisition time (s) | 6.08 | 6.19 | 6.32 | 6.51 | 6.71 | 7.00 | 7.34 | 7.98 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sung, J.-B.; Hong, S.-Y. In-Orbit Operational Parameter Calculation and Performance Optimization in KOMPSAT-6 Synthetic Aperture Radar. Remote Sens. 2021, 13, 2342. https://doi.org/10.3390/rs13122342
Sung J-B, Hong S-Y. In-Orbit Operational Parameter Calculation and Performance Optimization in KOMPSAT-6 Synthetic Aperture Radar. Remote Sensing. 2021; 13(12):2342. https://doi.org/10.3390/rs13122342
Chicago/Turabian StyleSung, Jin-Bong, and Sung-Yong Hong. 2021. "In-Orbit Operational Parameter Calculation and Performance Optimization in KOMPSAT-6 Synthetic Aperture Radar" Remote Sensing 13, no. 12: 2342. https://doi.org/10.3390/rs13122342
APA StyleSung, J.-B., & Hong, S.-Y. (2021). In-Orbit Operational Parameter Calculation and Performance Optimization in KOMPSAT-6 Synthetic Aperture Radar. Remote Sensing, 13(12), 2342. https://doi.org/10.3390/rs13122342